


Laten we eerst het verschil tussen de octocopter en de quadcopter begrijpen. Naast de naam is dit ook het aantal motoren op de rails. D.w.z. quadrocopter - vier motoren, octocopter - acht. Dit geldt ook voor de hexacopter - zes, tricopter - drie, enz. Als de gidsen bijvoorbeeld vier (X) en acht motoren zijn, dan is dit nog steeds een octocopter, maar wordt aangeduid als X8. D.w.z. op vier rails, acht motoren.
In feite zijn nummers met een prefix voor copters vliegtuigen die worden bestuurd door het radiosignaal van de operator vanaf de grond. Een student uit India besloot verder te gaan en een octocopter te maken die een persoon in de lucht kon laten opstijgen. Dit is geen goedkoop project. De financiering is overgenomen door de onderwijsinstelling.
Gereedschap en materialen:
- Motoren Turnigy CA170-motoren - 8 stuks;
- Controller Turnigy Fatboy 300A - 4 stuks;
- Turnigy 200A HV-controller - 4 stuks;
- Zender Hitech XG11 Tx / Rx;
-Flight DJI A3 Pro-controller;
-Flight controller DJI Naza M V2;
- Batterij Zippy 22.2V 5Ah 40C LiPo - 16 stuks;
- Oplader 6s LiPo-oplader;
-XT150 connectoren - 50 stuks;
-Draad 8AWG Sillicone Wire - 10 meter;
Servo's;
-Bal voor het spelen van squash (Squashballen) - 4 stuks;
- MDF-plaat 25 cm x 50 cm x 2 mm;
-Boor;
- Haakse slijper;
- schroevendraaiers;
- Moersleutels;
- Tang;
-Lasersnijder of lintzaag;
-Assortiment van moeren 4 mm, 6 mm en 8 mm, bouten en ringen;
-Brander;
-LED LED;
-Soldeeraccessoires;
- 2 en 3 mm staaldraad;
-Telrep schroef 100 mm-200 mm - 40 stuks;
- 40 haken en oogbouten;
-Tachometer Turnigy RPM;
-Power Analyzer (Turnigy Wattmeter / Ampmeter);
-Batterijcontroller;
- Aluminium profielbuizen;
-Aluminium plaat;
- Dubbelzijdige tape;
-Lasmachine;
-Roulette;
-Computer met Fusion 360;
- Batterij 11,1 V 2200 mAh LiPo 30C;
-Dichte stof 1,2 mx 1,2 m;
- Sterke draad en naald;
-Gordel veiligheid;
Stap één: ontwerp
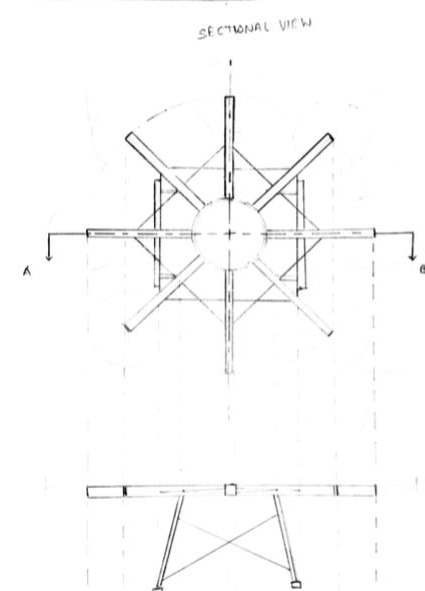
Bij het ontwikkelen van een bemande octocopter overwoog de meester verschillende configuratie-opties, en X8 en H, en T, maar kwam tot de conclusie dat het ontwerp van de octocopter, om verschillende redenen, volgens het traditionele schema het meest optimaal zou zijn.
Vervolgens was het nodig om erachter te komen wat de grootte van de octocopter moet zijn. De berekeningen zijn gemaakt met CAD-modellen op de Fusion 360 als voorbeeld, bij de berekeningen is rekening gehouden met de bestaande schroeven. Het optimum bleek een diameter van drie meter te zijn, een hoogte van één meter. Binnenmand, voor een persoon 55x55 cm.

Stap twee: Winkelwagen
Het frame is gelast uit een aluminium vierkant profiel met een plank van 50 mm en een wanddikte van 2 mm.
Het profiel is gesneden en gelast. De naden zijn schoongemaakt.



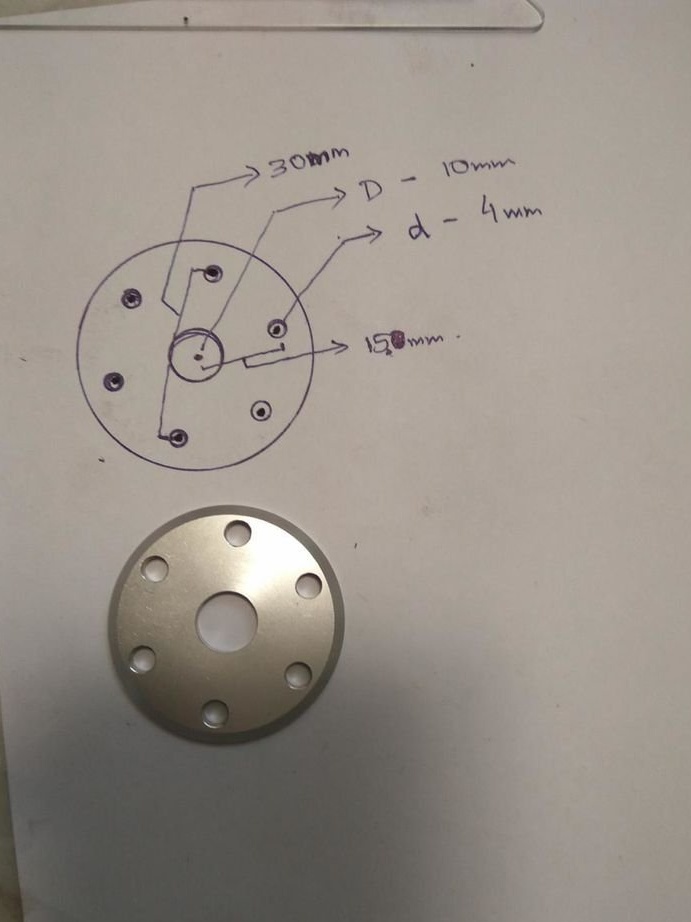
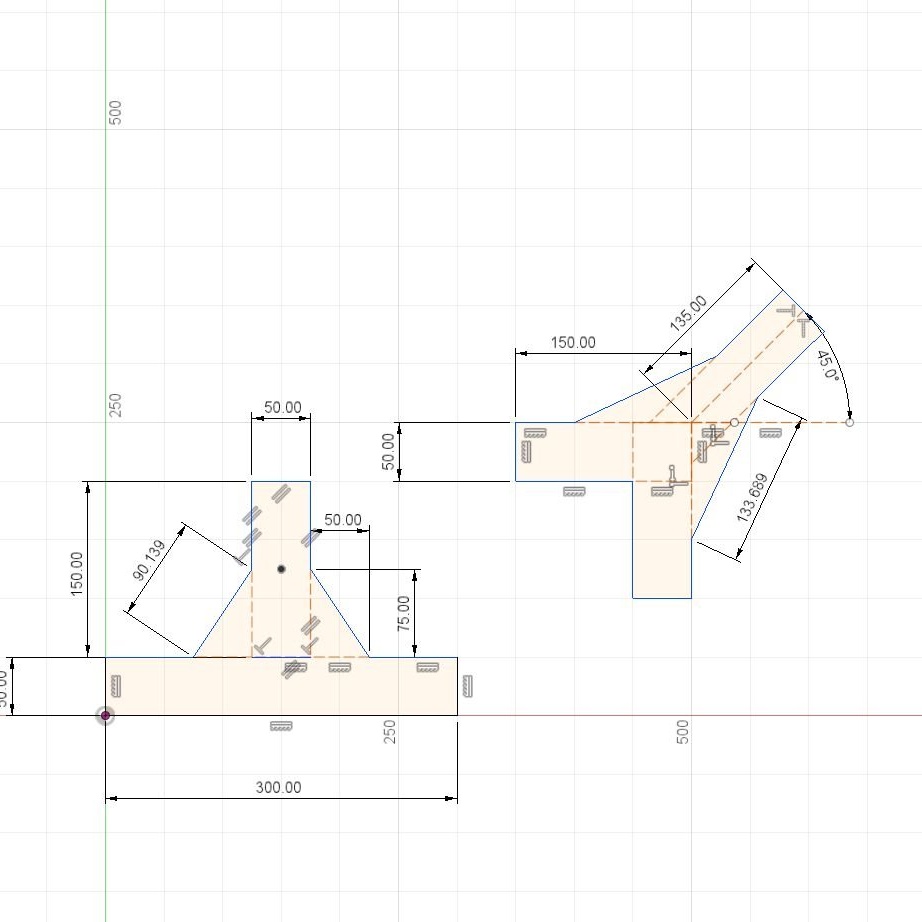
Stap drie: montageplaten
Voor beugels gebruikte de meester aluminium platen van 1,5 mm. Er zijn in totaal acht beugels, vier in de hoeken en vier in het midden van het frame. De lengte van de armschouder en het ondersteunende deel is elk 15 cm De beugels zijn ontworpen in de Fusion 360. De platen zijn gesneden met een frees. Er zijn montagegaten in geboord. Vervolgens zijn de beugels aan het frame gelast.

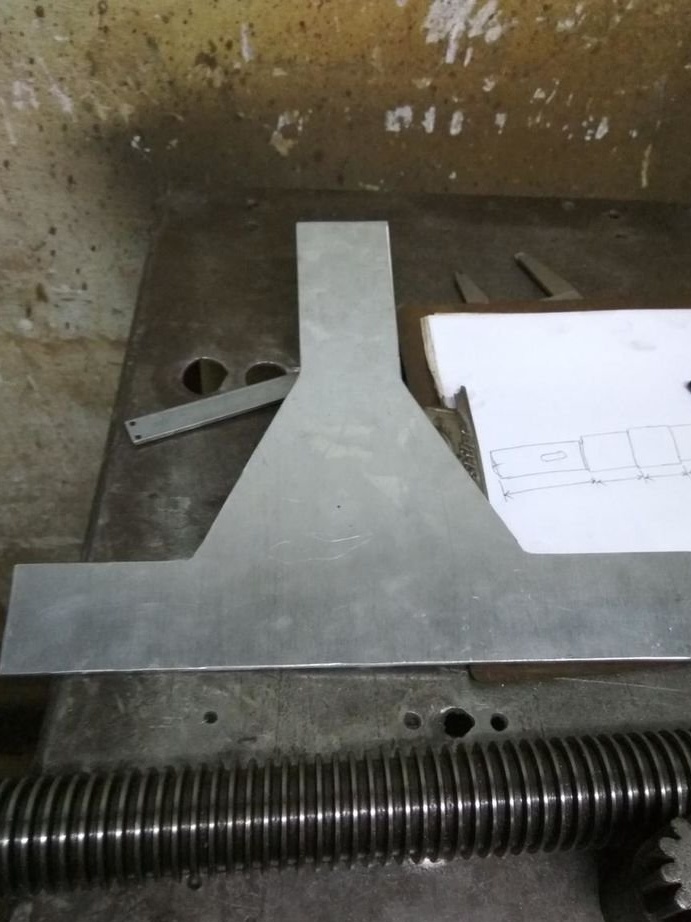





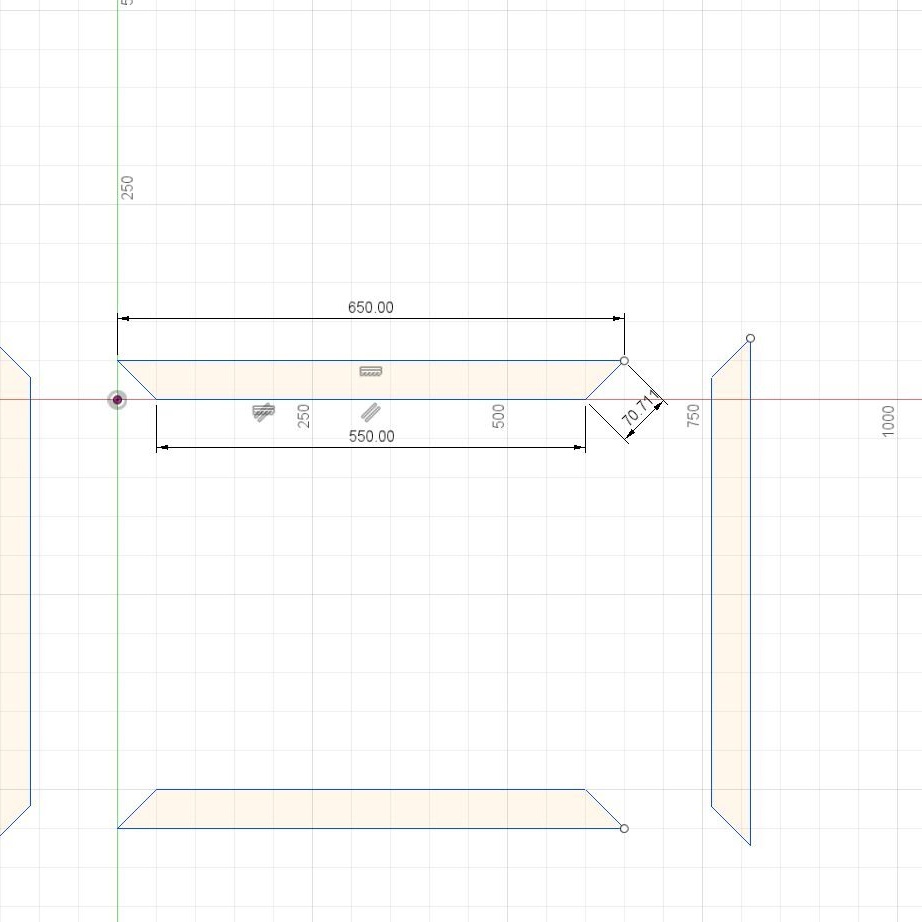
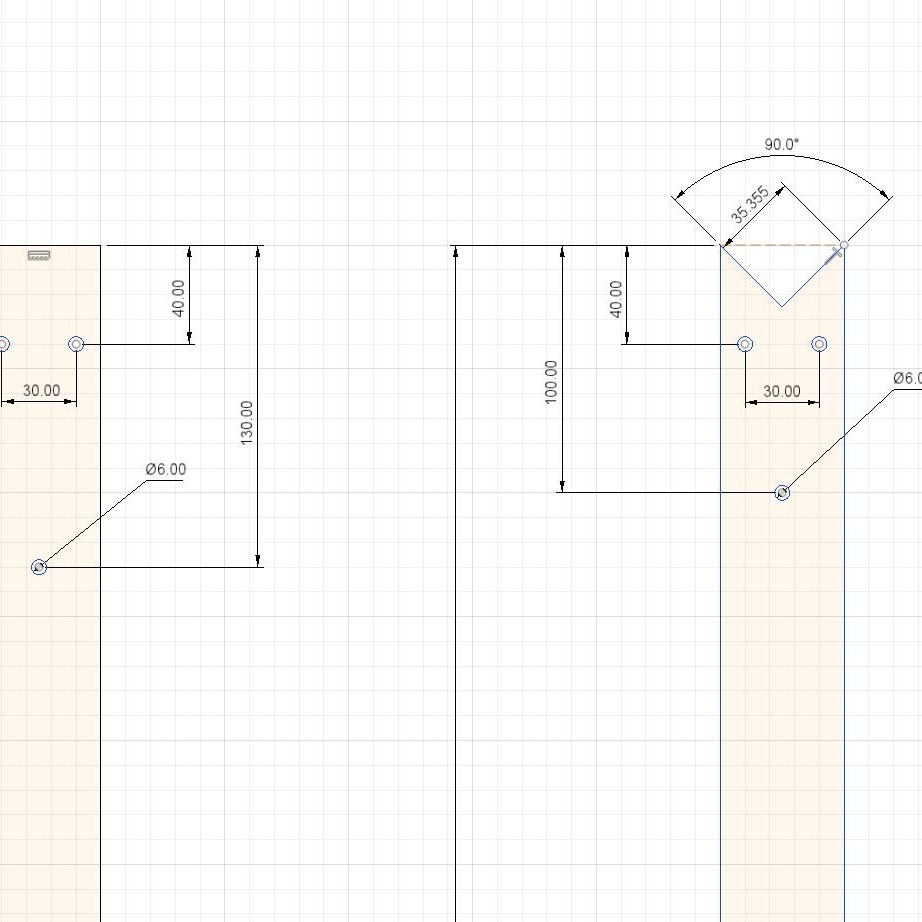
Stap vier: Carrier-profiel
Deze profielen worden aan de beugels bevestigd en motoren worden aan hun uiteinden geïnstalleerd. De profielen zijn vierkant, 50 x 50 cm en hebben verschillende lengtes. In de hoeken zijn profielen 112,5 cm lang bevestigd, 125 cm in profiel aan de zijkanten Er is een uitsparing gemaakt bij hoekprofielen onder een hoek van 45 graden. Het is noodzakelijk dat het eindvlak ervan grenst aan het hoekvlak.
Om de profielen aan de beugels te bevestigen, boort de meester gaten voor de bouten.




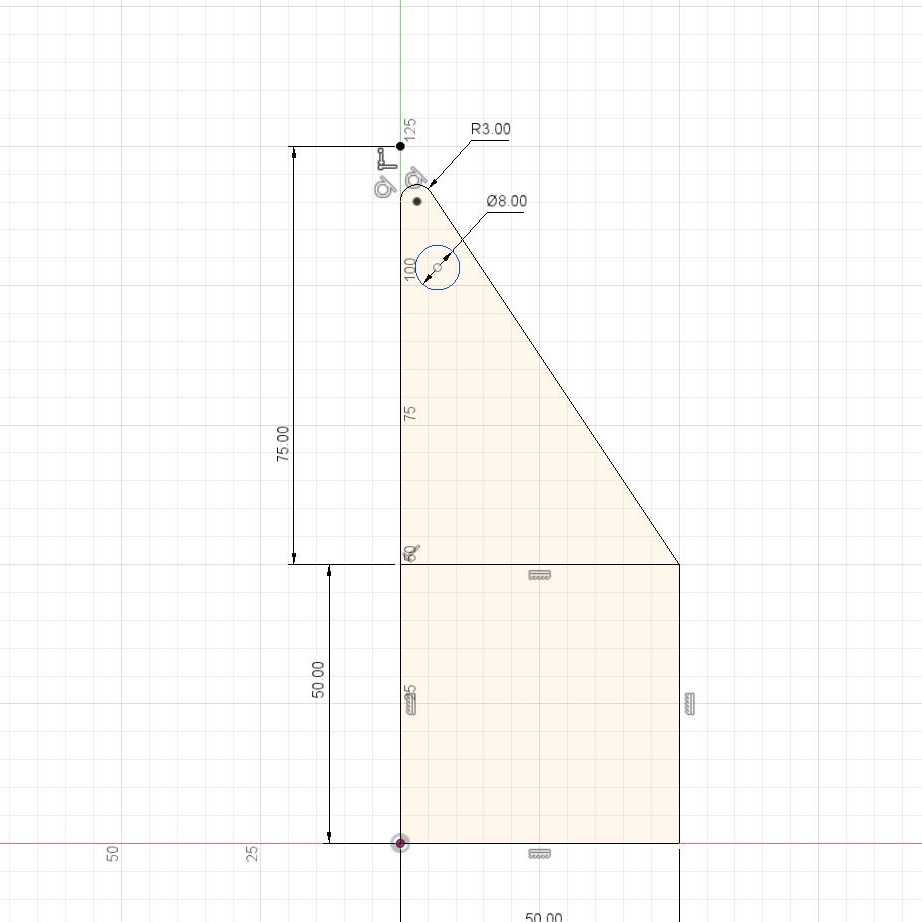
Stap vijf: Engine Mount
Motoren worden op een vierkante aluminium plaat geschroefd. Vanaf de onderkant van de plaat, parallel aan elkaar, worden twee hoeken geschroefd. De afstand ertussen is gelijk aan de breedte van het profiel. Verder wordt de plaat met de motor op het profiel gemonteerd, worden de montagegaten geboord en wordt alles met bouten verdraaid.





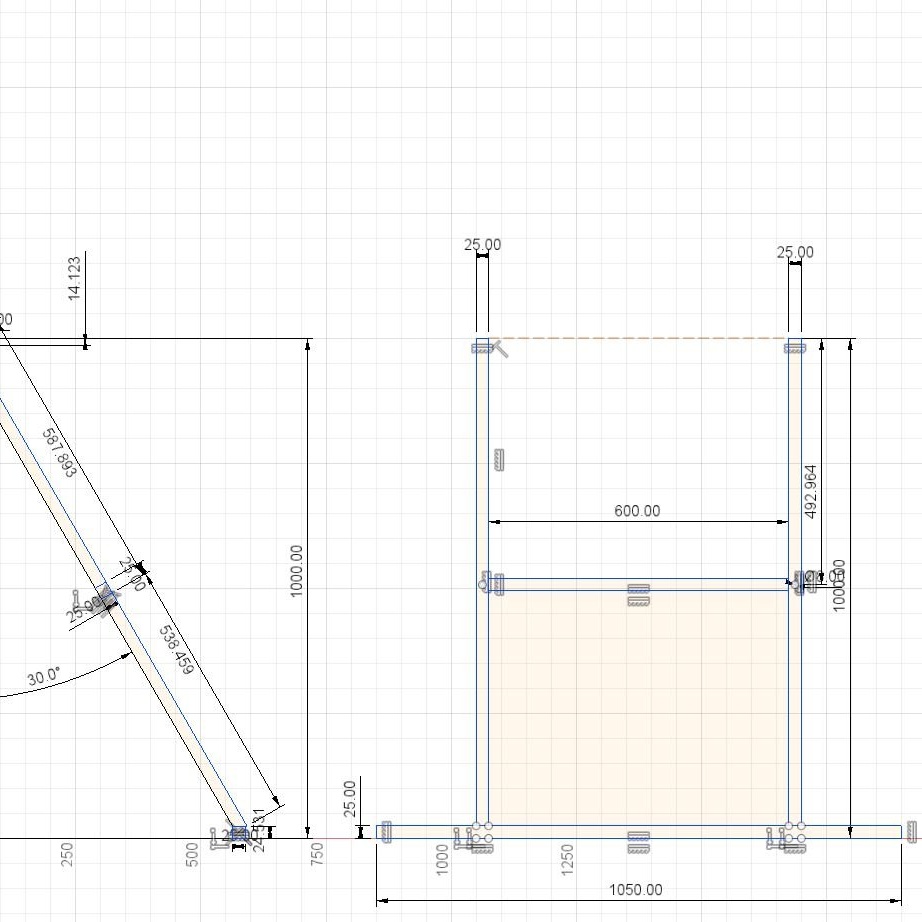
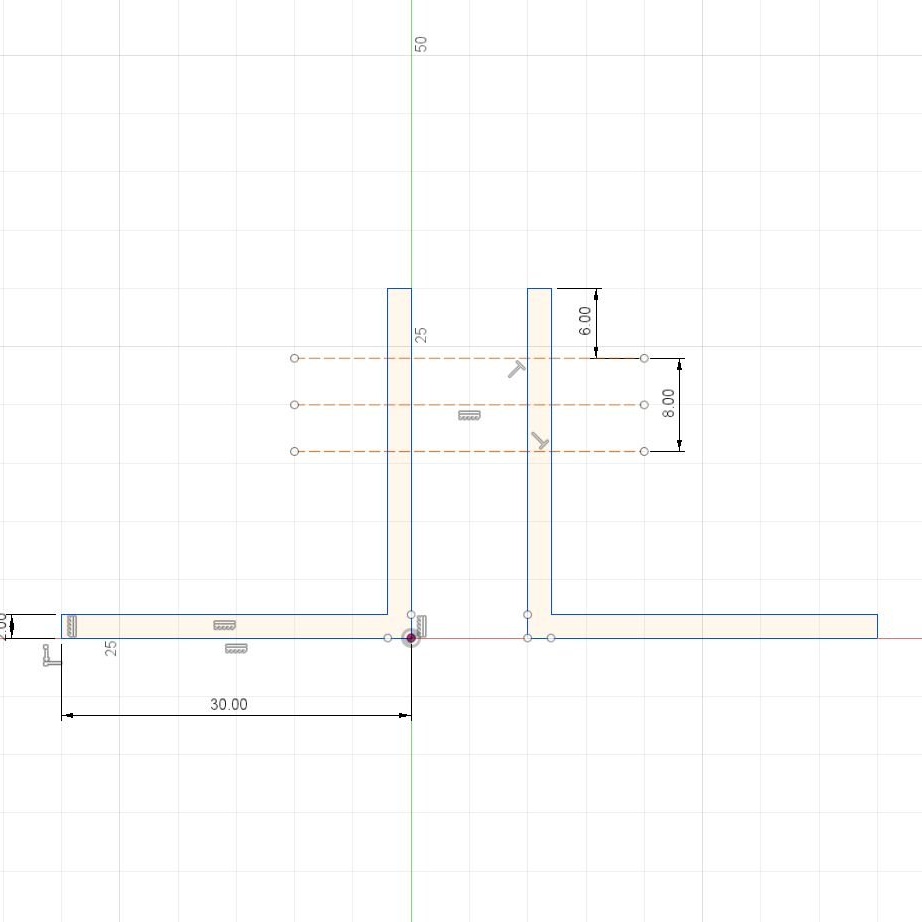
Stap zes: chassis
Het chassis is gemaakt van aluminium profielen 25 x 25 mm en een dikte van 3 mm. Alle onderdelen waren gelast en hun afmetingen zijn te zien op de foto. Het idee was om het chassis onder een hoek van 30 graden uit de mand te monteren. Om schade aan het chassis te voorkomen, worden er ondersteuningskabels tussen getrokken.


Stap zeven: ondersteuningsprofielen ondersteunen
Na het installeren van de motoren begonnen de ondersteunende profielen te buigen. Vervolgens probeerde de meester de motor te starten en ontdekte dat de profielen "lopen". Het ontwerp moest worden versterkt.
Het toevoegen van platen zou de constructie te zwaar maken. Vervolgens besloot de meester om vanaf de mand een V-vormig ontwerp te maken. Touwen zijn bevestigd aan het onderste deel. De andere uiteinden van de kabels zijn bevestigd aan de beugels in het midden van de steunprofielen. Kabels worden getrokken met een takel. Zo wordt de structuur stijf.















Stap acht: verbinden
Ten eerste soldeert de meester de connectoren naar de uiteinden van de draden.


Vervolgens begint de installatie. Elke motor moest worden gecontroleerd op draairichting. Indien nodig is het gemakkelijk om de draairichting van de motor te veranderen, en dienovereenkomstig de schroef, waarbij twee van de drie draden van de ESC naar de motor worden verwisseld. Nadat alle motoren correct waren aangesloten, heeft de wizard de installatie uitgevoerd volgens het aansluitschema van de fabrikant.
Vluchtcontrollers IMU DJI A3 zijn erg gevoelig voor interferentie van metalen en de master kon het systeem niet configureren vanwege interferentie. Als gevolg hiervan verving de meester A3 door de Naza M V2, die een vergelijkbaar verbindingsschema had. Naza M V2 werkte zeer betrouwbaar.
Vervolgens verbindt de wizard de batterijen. Op elk draagprofiel zijn twee 22,2 V accu's in serie geschakeld.



Stap negen: Pilootstoel
De stoel is gestikt van duurzame stof. Ook is een veiligheidsgordel aan de piloot bevestigd, die aan het frame is bevestigd, en een helm.






Stap tien: eerste vlucht
Vóór de vlucht van de piloot op de octocopter werden verschillende tests uitgevoerd met een zandzak en vervolgens met een model van een persoon. Tijdens de vlucht werden verschillende situaties gesimuleerd van controleverlies tot een windvlaag.
Na alle testen vloog de piloot uiteindelijk de lucht in.






Voordat u gaat vliegen, moet u de volgende acties uitvoeren.
Controleer de dichtheid van bouten, kabels, motorophanging.
Controleer de bedrading.
Controleer of de schroeven gemakkelijk draaien.
Zorg ervoor dat alle ESC's zijn uitgeschakeld.
Zorg ervoor dat alle batterijen stevig zijn bevestigd en opgeladen.
Sluit de voeding aan op de vluchtcontroller voor initialisatie en kalibratie.
Nadat het verbinding heeft gemaakt met GPS, schakelt het over naar de volledig automatische modus (Alt. + Att. Hold).
Ga op de stoel van de piloot zitten en maak je vast.
Sluit alle batterijen aan op de ESC.
Verbind de twee batterijen in serie (ESC-RB-RB-ESC) met behulp van een weerstand om de vonk te elimineren.
Zet de motoren aan door de schakelaar in de aan-stand te zetten.
Gebruik de controller om de octocopter te besturen.