


In dit artikel laat de tovenaar zien hoe hij de acterende Lego 60193 Arctic Air Transport-helikopter heeft gemaakt het model quadrocopter. De belangrijkste taak bij de fabricage van de quadrocopter was, naast vliegkwaliteiten, het sparen van zoveel mogelijk originele onderdelen.
Laten we een korte video bekijken die de werking van de quadrocopter laat zien.
Dus voor de vervaardiging van zo'n quadrocopter gebruikte de meester het volgende
Gereedschap en materialen:
-LEGO City Arctic Helicopter - 60193:
- Controller en ESC 20x20 mm, bijvoorbeeld HGLRC XJB F428 Micro F4 AIO OSD;
- Borstelloze motoren - 4 stuks;
Propellers
-Batterij 950 mAh;
-Connectors;
-Draad;
-Radio module (zender en ontvanger);
-Fasters;
-Mes;
-Soldeerbout;
-Lijmpistool;
- schroevendraaier;
-Boor;
Stap één: Lego Build
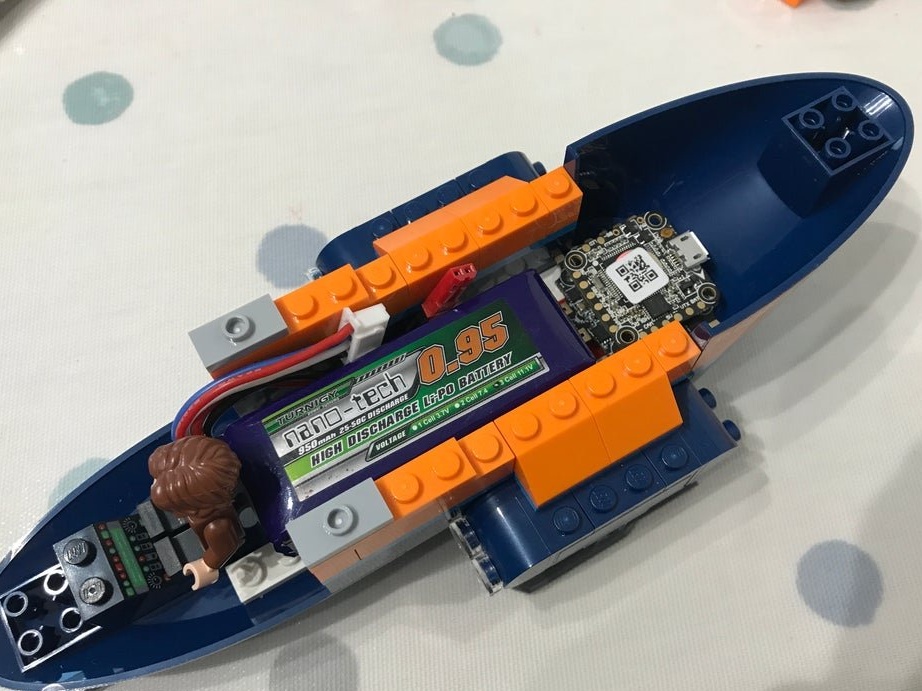
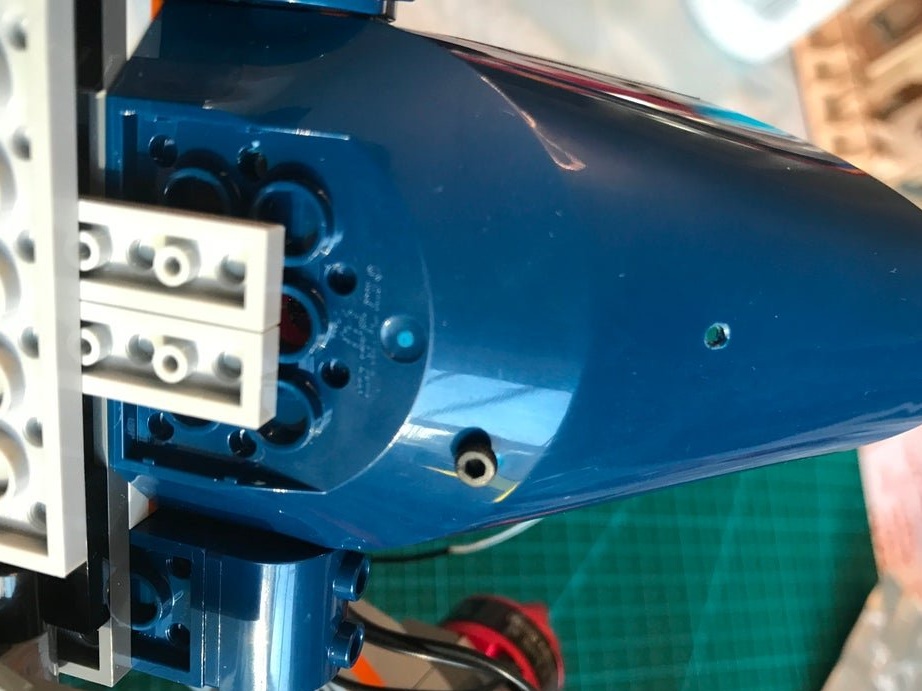
Eerst haalt de meester de LEGO-Arctic op. Vervolgens wordt het model gedeeltelijk gedemonteerd. Binnenin moet u de batterij en controller plaatsen, waarbij u de balans van het model in acht neemt.


Stap twee: Engine Mount
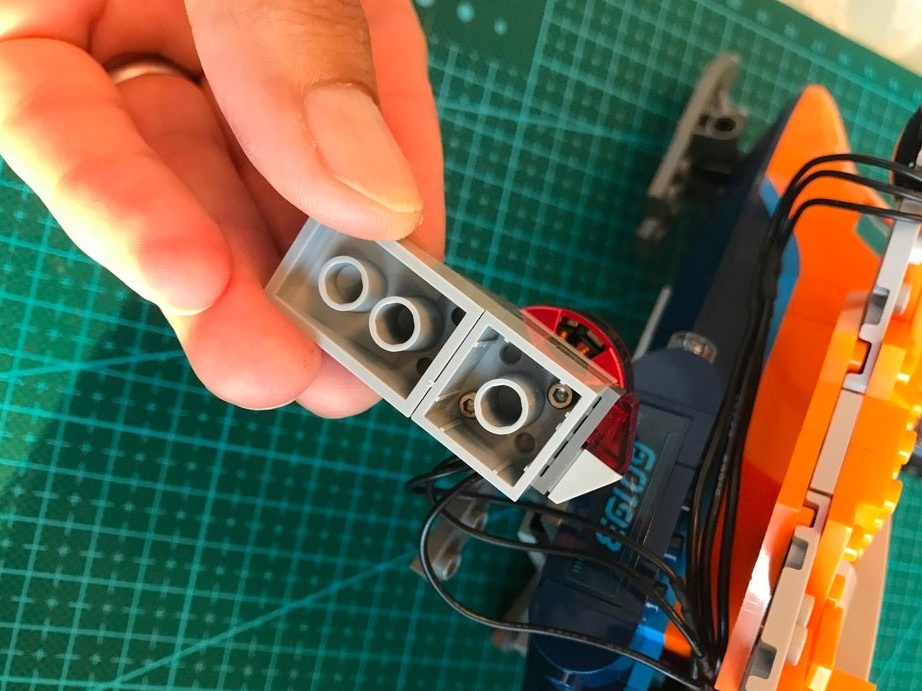
De montagegaten voor de standaard 1806 borstelloze motor zijn vrijwel hetzelfde als de tapeinden op de standaard LEGO 2x2 plaat. Elke "motor" -montage op een quadrocopter heeft een 2x2 donkergrijze tegel (LEGO 3022) en een 2x2 lichtgrijze tegel met een verticale pen (LEGO 2460), die meestal op de naven van een LEGO propeller wordt gehouden.
De meester boort de montagegaten. Op motoren is er in het midden eb. In het midden van de tegel wordt een gat eronder geboord. Beveiligt motoren.








Stap drie: schouders
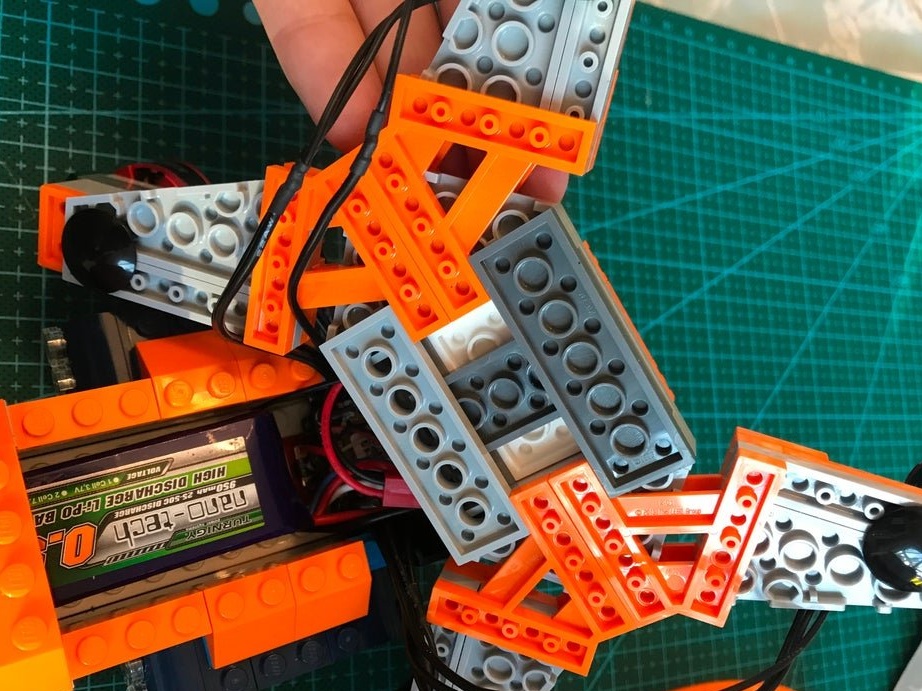
Door de 'schouders' van de quadrocopter opnieuw te rangschikken, kunt u de lay-out enigszins wijzigen om een bredere of smallere opstelling van de motoren en de locatie van de schroeven ten opzichte van elkaar te verkrijgen.
De standaard LEGO-montage (eerste foto) heeft "schouders" en motoren die breed (horizontaal) zijn geplaatst met een vrij grote schroefoverlap. De meester maakt de 'schouders' opnieuw en gooit de motor en daarmee de schroeven.



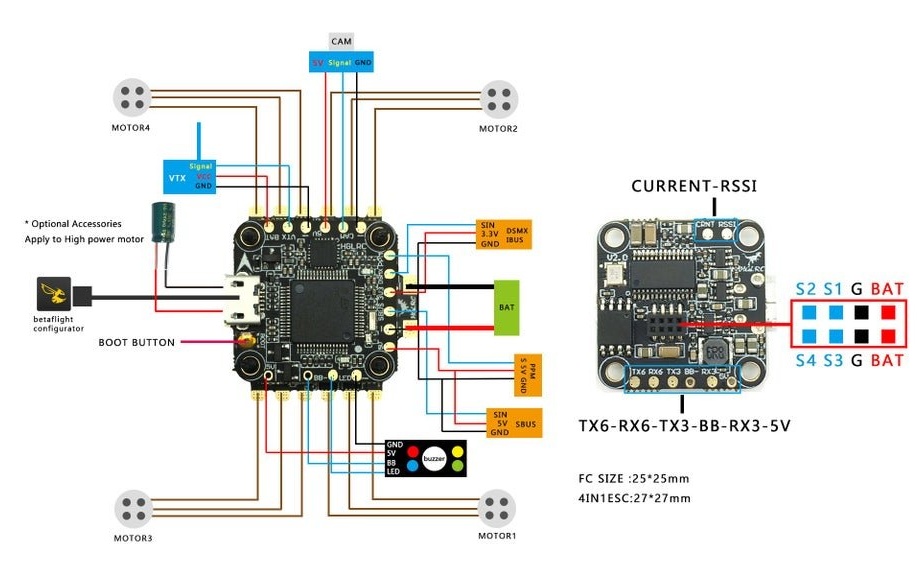
Stap vier: elektronica
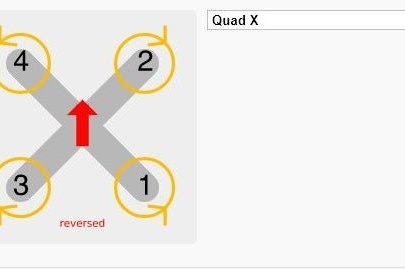
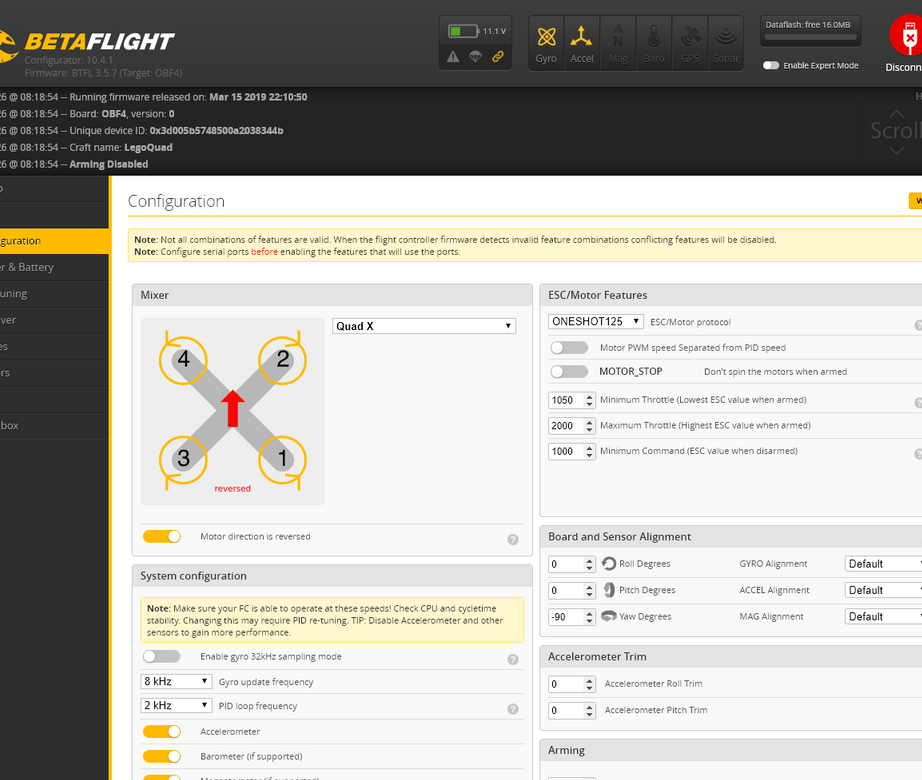
Volgens het schema installeert het elektronica. De eerste foto toont een diagram van de draairichting van de motoren. De draairichting kan ook tijdens de programmeerfase worden gewijzigd.

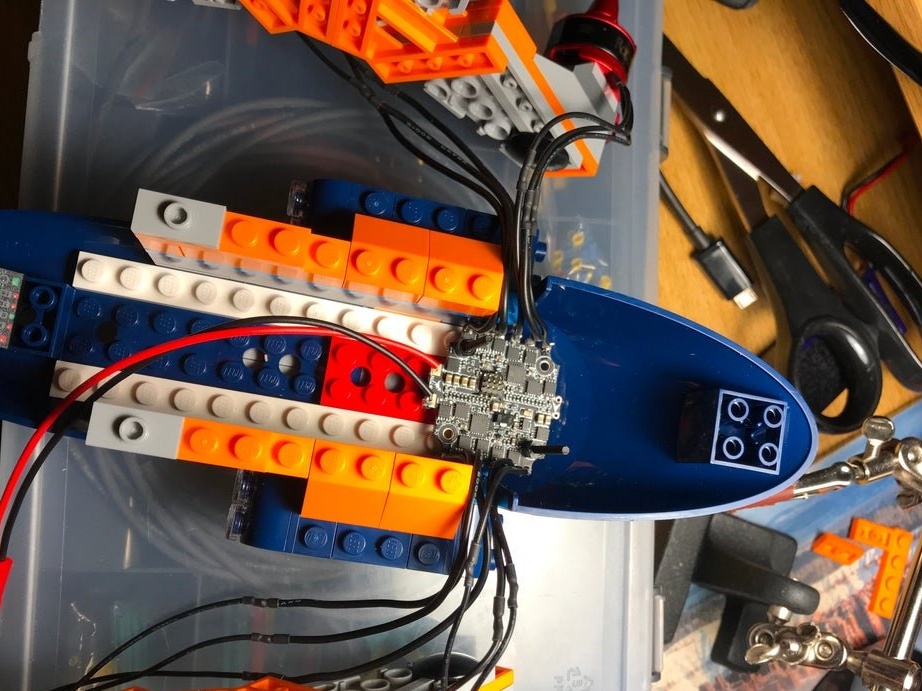
Nadat de installatie is voltooid en voordat de batterij wordt aangesloten, controleert de wizard de verbindingen om breuk of kortsluiting te voorkomen.
Wanneer u de stroom inschakelt, ziet u de lampjes op de vluchtcontroller en een paar piepjes van de ESC.
Stap vijf: installatie
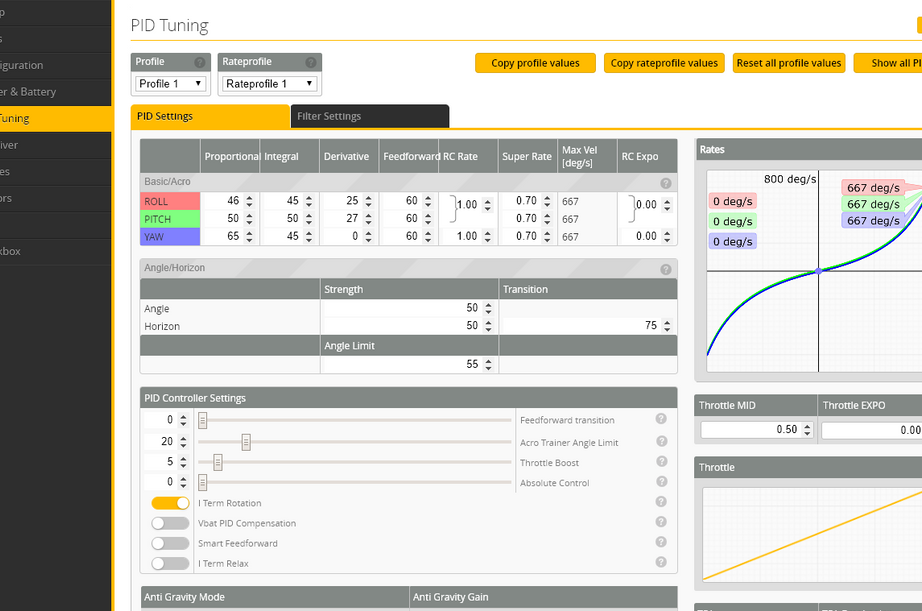
Nu alles is aangesloten, is het tijd om de controller te configureren.Dit betekent het downloaden van software (firmware) die de taak vervult van het decoderen van de stuursignalen van de RC-zender, het verwerken van het sensoringangssignaal (gaspedaal, gyroscopen) en het leveren van stuursignalen voor de ESC om de motoren met een bepaalde snelheid te laten draaien.
Verwijder de schroeven voor de veiligheid! Een batterij is niet vereist voor de eerste paar instellingsstappen, alleen USB-voeding.
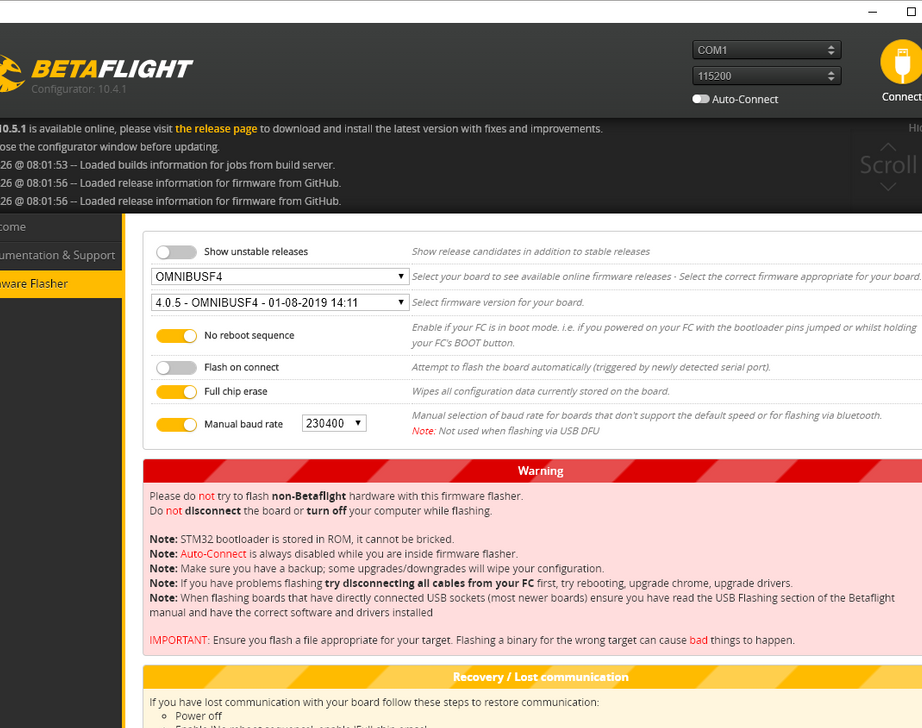
Download Beta Configurator
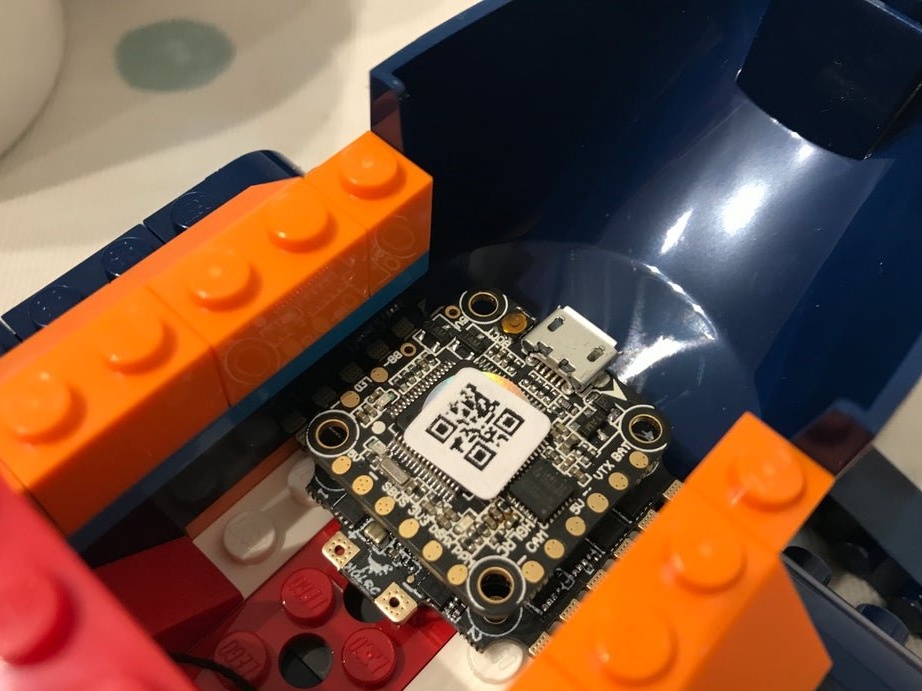
Sluit de micro-USB-kabel aan op de vluchtcontroller. Houd er rekening mee dat dit misschien gemakkelijker te doen is als de controller niet op het chassis is geschroefd.
Download en upload de juiste firmware voor de vluchtcontroller.
betaflight-instellingen-legoquad.txt
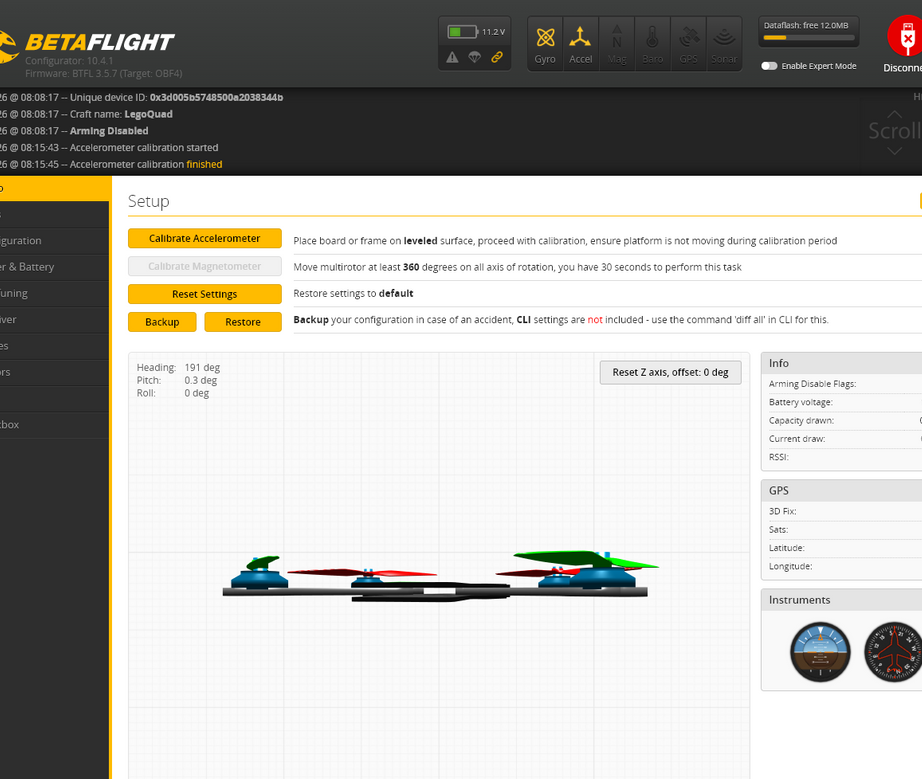
Klik op de knop "Connect" en configureer de volgende instellingen:
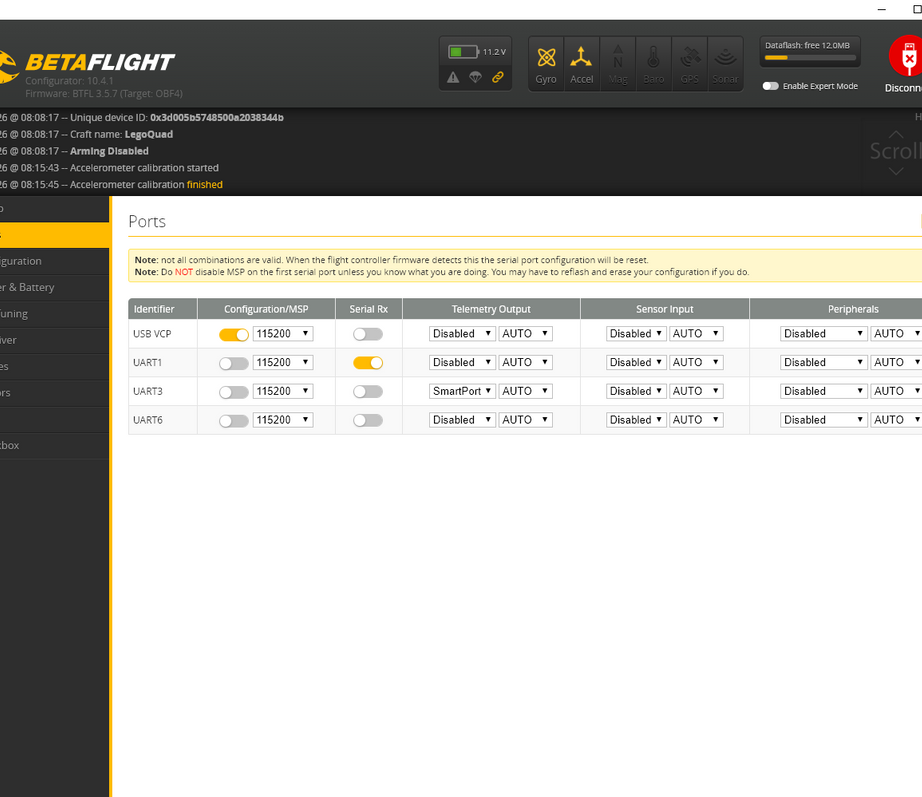
1. Opstelling - modelkalibratie van motoren
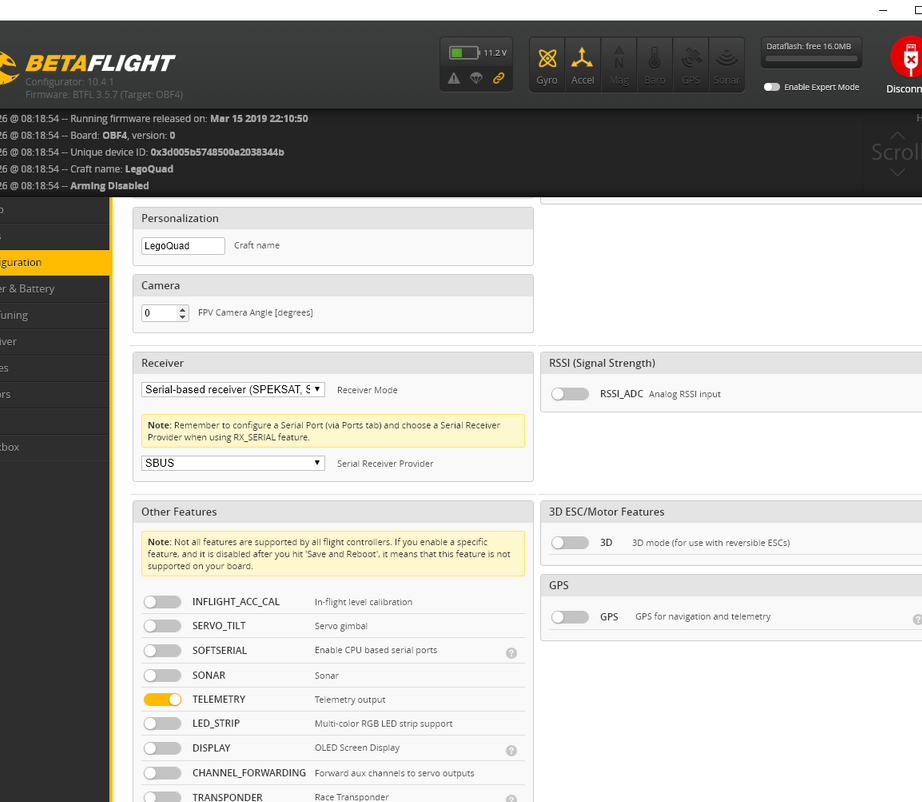
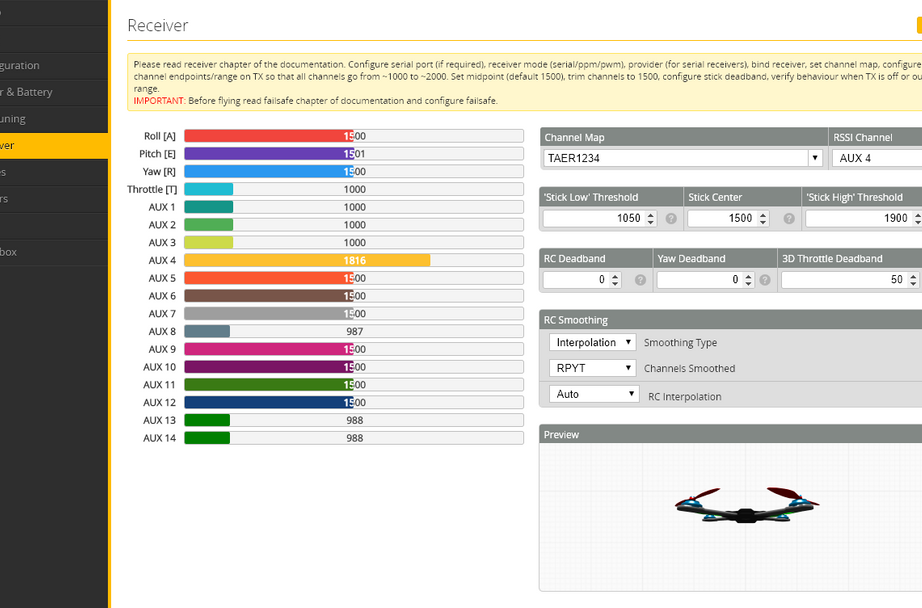
2. Specificeer de poorten - UART1 - Seriële RX voor het aansluiten van de SBUS RC-ontvanger
3. Opslaan en opnieuw opstarten
4. Breng een verbinding tot stand tussen de ontvanger en de zender
5. Overbelasting
6. De waarde voor de PID-master is ingesteld op 250
7 Sluit de batterij aan
8. Pas de spanning aan.
9. Zorg ervoor dat uw kanaalweergave en bedieningsrichting correct zijn, wanneer alles is ingesteld, moet het quadcopter-modelbeeld in de rechter benedenhoek in alle juiste richtingen bewegen wanneer u de joysticks op de RC-controller beweegt.
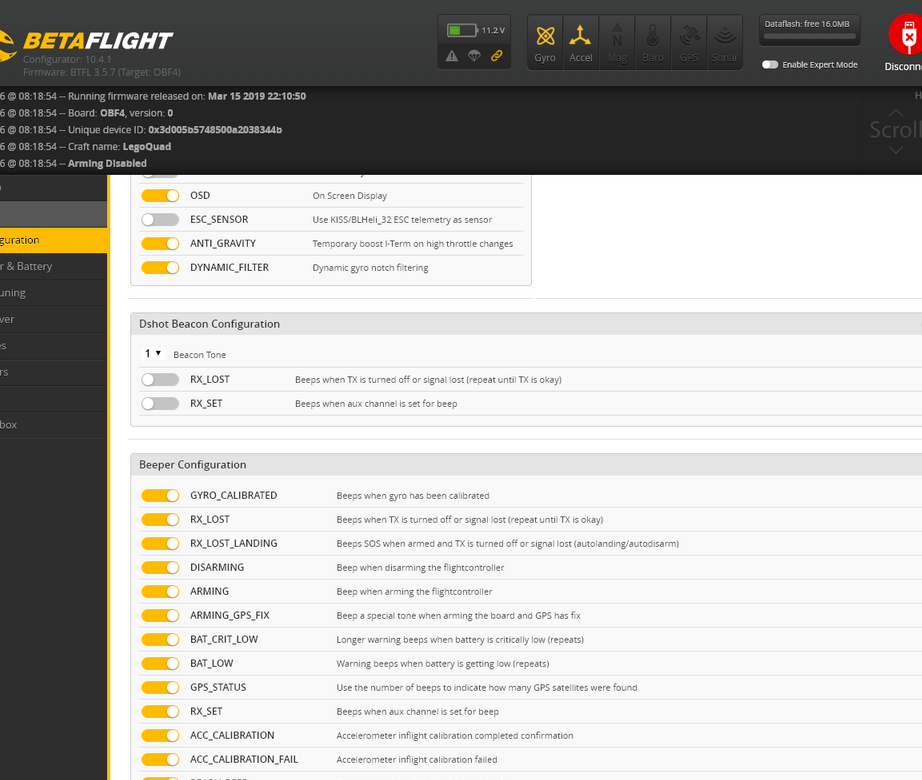
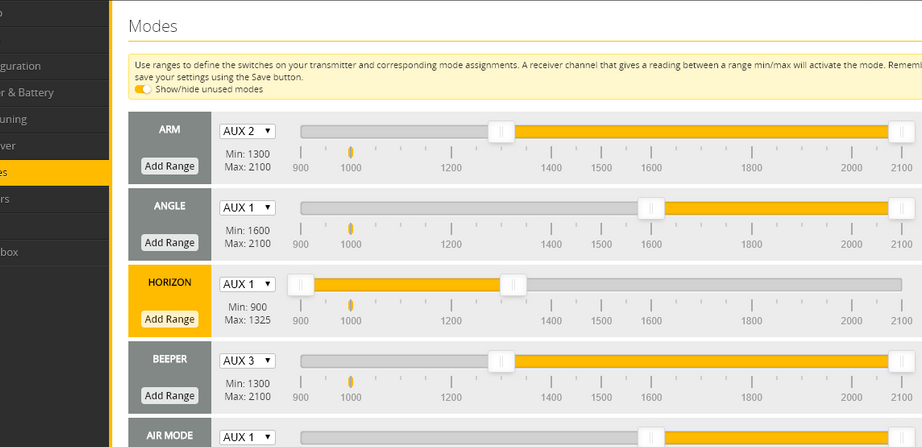
Configureert de modi.
ARM aan / uit
HORIZON zelfnivellerend / ACRO voor traditionele FPV-vlucht
PIEPER - Handig als u het model verliest in hoog gras of struiken.
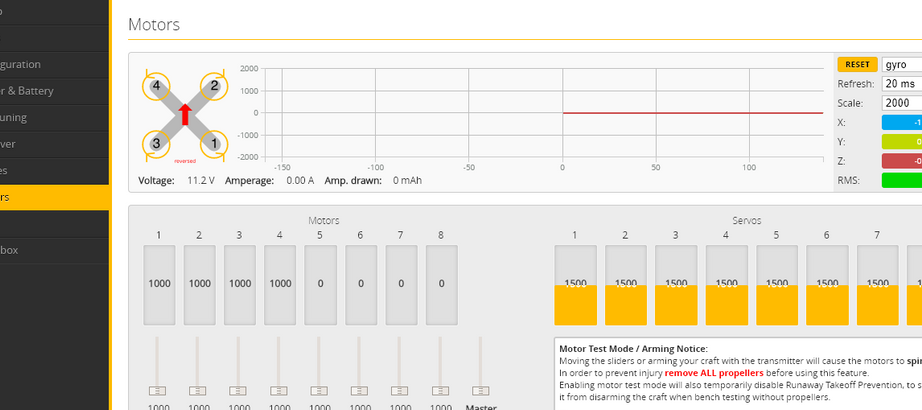
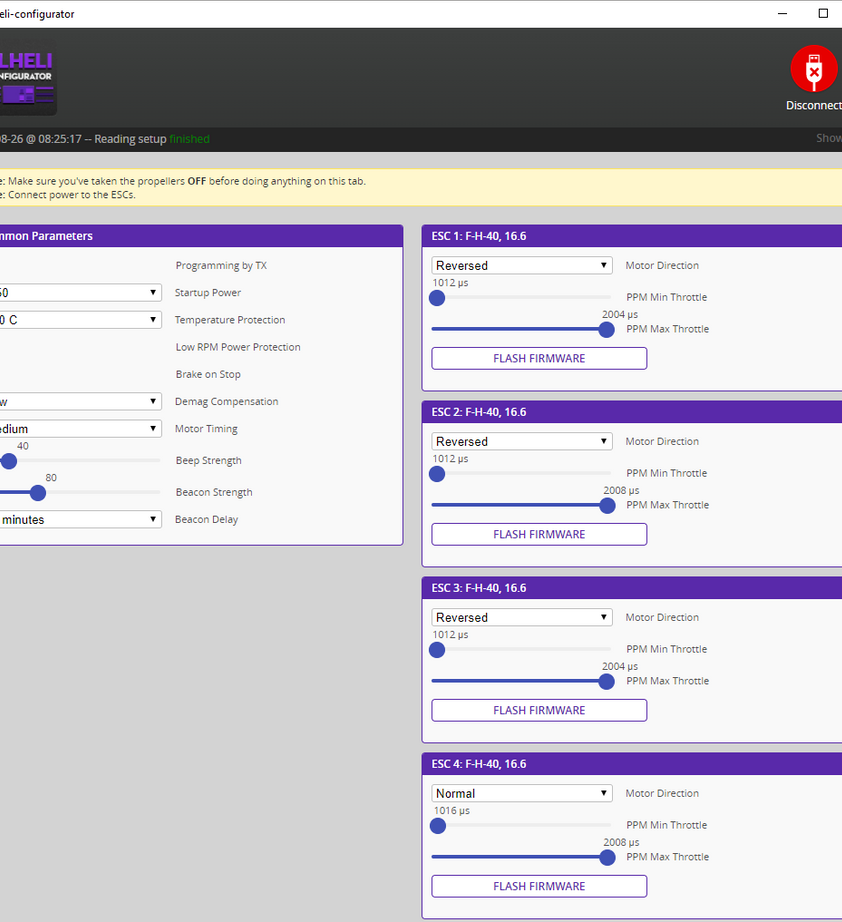
Tabblad "Motoren" - gebruik deze optie om elke motor afzonderlijk te controleren en, belangrijker nog, de draairichting van elk van deze motoren te markeren
Corrigeer elke verkeerde draairichting met de BLHELI-configurator
Na al deze stappen kunt u de USB en de batterij loskoppelen, vervolgens de stroom inschakelen en controleren of alles werkt:
Schakel de zender en de stroom in
Sluit de batterij aan en monteer de quadrocopter op een vlak oppervlak
Zet de ARM-schakelaar aan en de motoren moeten op lage snelheid gaan draaien.
Controleer het gas terwijl u de snelheid verhoogt
Probeer in horizontale modus de quadrocopter te kantelen en zorg ervoor dat de motoren goed reageren, kantel hem bijvoorbeeld naar voren en de voorste motoren zullen versnellen.

Stap zes: eindmontage
Vrijwel de hele structuur van de koffer wordt vastgehouden met montagesloten. De master gebruikt alleen smeltlijm om de motoren te monteren.


Alles is klaar en u kunt testen.



