

Het artikel behandelt een voorbeeld van het maken van een legendarische robot genaamd "Canbot". Het grootste deel van de details voor de robot wordt afgedrukt op een 3D-printer. De robot wordt op afstand bediend.
Materialen en tools voor zelfgemaakt:
- Een Atmel Attiny85 microcontroller;
- twee microservices HXT900 of hun analogen;
- één 3,7 V LiPo-batterij;
- één infrarood ontvanger op 38 kHz;
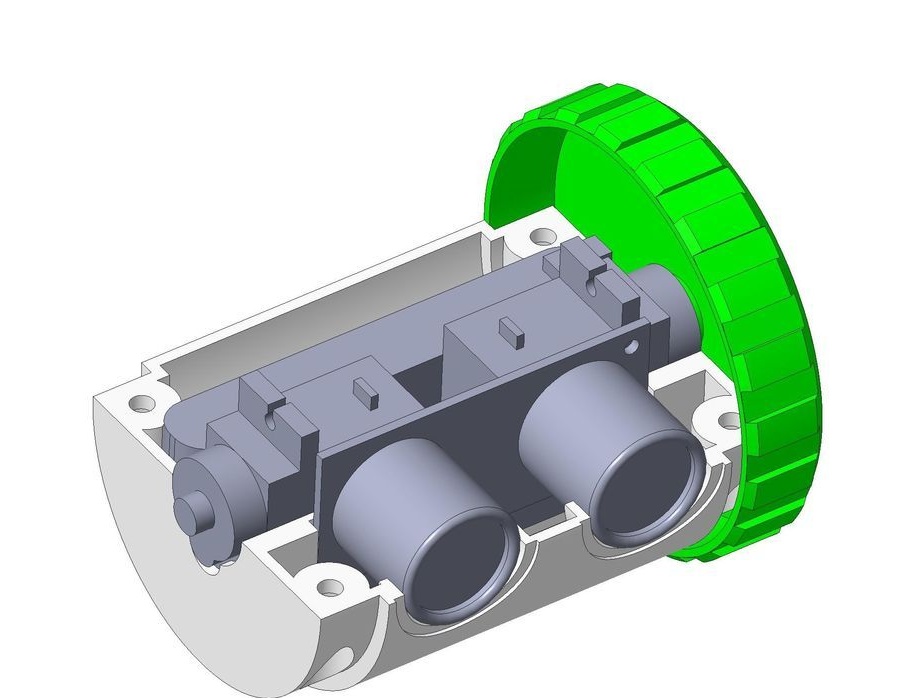
- ultrasone transducer type HC-SR04;
- 9x4mm schakelaar of jumper in plaats daarvan;
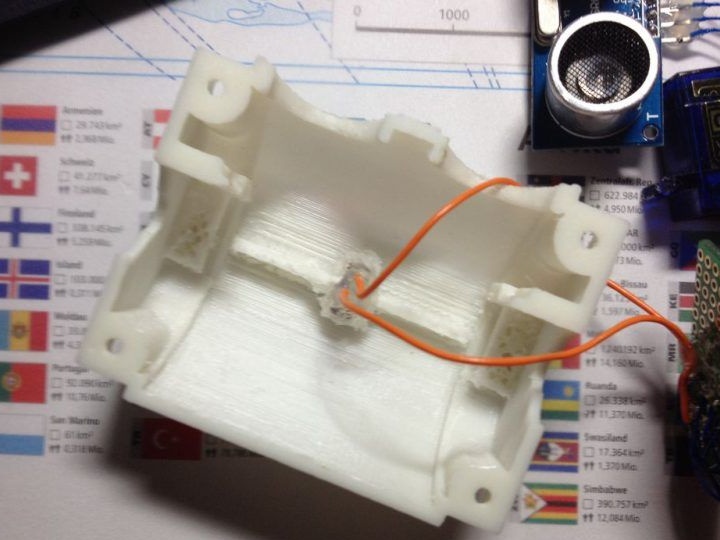
- 3D-onderdelen (mogelijk). Er zijn één boven (top.stl), één onder (bottom.stl) en twee wielen (wheel.stl) voor nodig.
Natuurlijk zijn soldeergereedschappen, hete lijm, schroevendraaiers, schroeven, draden en andere kleine dingen nodig.

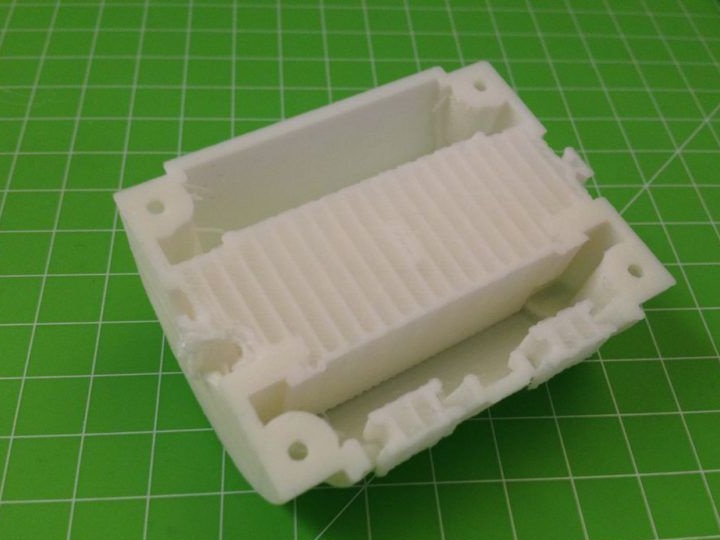
De bovenste en onderste delen moeten met de platte zijde naar beneden worden bedrukt met behulp van de optie "ondersteunende structuren". Afhankelijk van welk type printer werd gebruikt, moeten afgewerkte onderdelen mogelijk aan het einde worden gereinigd.
Het fabricageproces van de robot:
Eerste stap. Elektronisch onderdeel van de robot
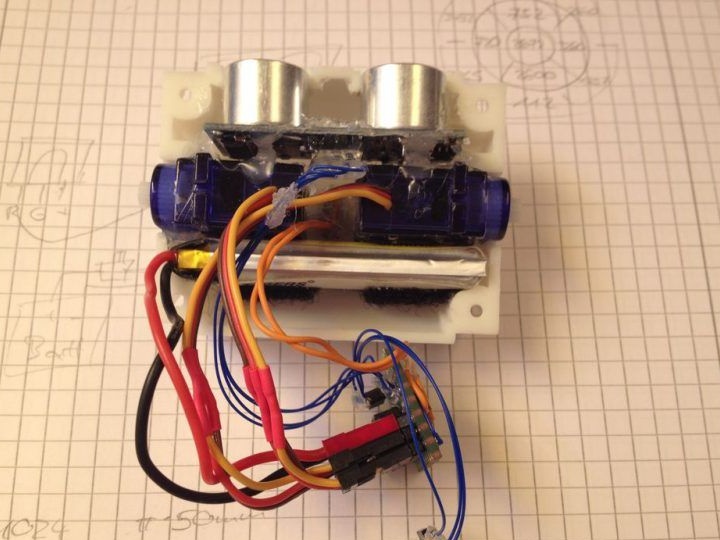
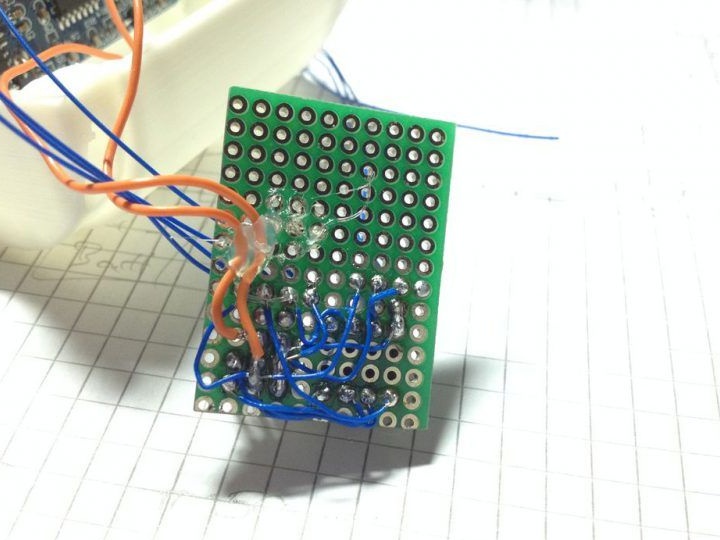
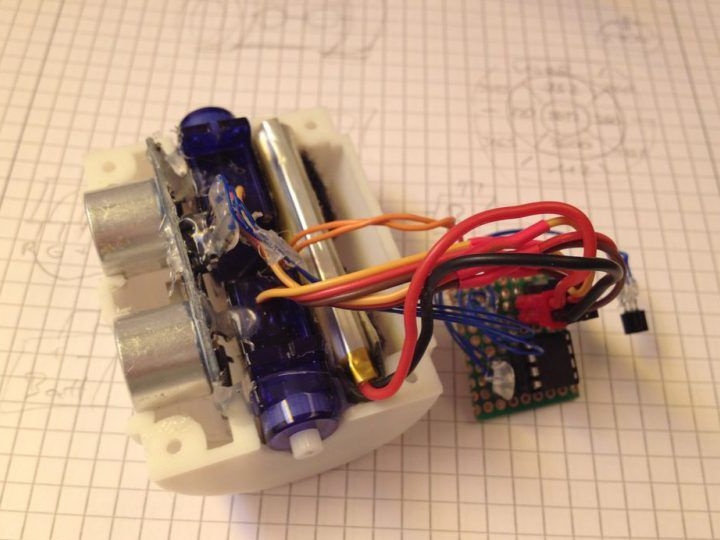
Eerst moet u de servo's configureren, ze moeten worden geconverteerd naar continue rotatie. Hoe u dit moet doen, er zijn talloze instructies op internet. Welnu, dan moeten alle elektronische elementen worden gemonteerd zoals aangegeven in het diagram. Om het elektronische onderdeel in elkaar te zetten, was het handig, je kunt een klein stukje broodplank nemen, evenals dunne draden.


Stap twee Het softwaregedeelte van de robot
Als je het proces van het maken van een robot met de hoogste professionaliteit benadert, kan het softwaregedeelte onafhankelijk worden geschreven. Maar hiervoor moet je wel een programmeertaal leren. In een eenvoudigere versie kunt u kant-en-klare code downloaden en deze eenvoudig uploaden naar de microcontroller.
Volgens de auteur het beste de robot ontvangt infraroodsignalen van afstandsbedieningen van Sony. In de toekomst zal het codegedeelte moeten worden "reflashed" Arduino en voer de gegevens uit via de functie Serial.print (). Als gevolg hiervan is het mogelijk om uit te vinden wat voor codering op elke knop staat.
Stap drie De laatste fase. Monteer de robot
Nou, tot slot gaat de robot. Voor deze doeleinden heb je hete lijm nodig. Hiermee moet je de draden vastzetten zodat ze niet loskomen als de robot beweegt.Het is ook nodig om de schakelaar vast te zetten en de ultrasone sensor goed te bevestigen. Concluderend worden de deksels van de robot met vier schroeven verbonden, waardoor deze indien nodig eenvoudig kan worden gedemonteerd. Trouwens, schroeven voor servo's zijn perfect voor montage.

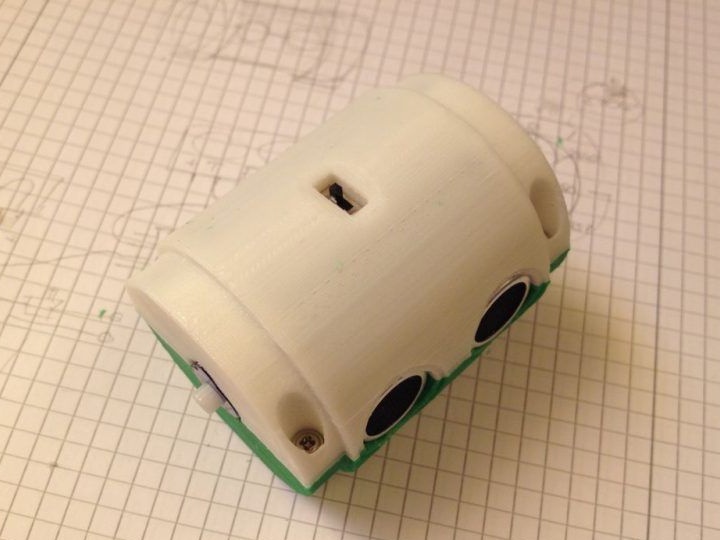
Dat is alles, nu is de robot bijna klaar. Het blijft over om de wielen op de servomotorassen te installeren en je kunt beginnen met het testen van de robot. Je kunt in meer detail zien hoe zelfgemaakt werk in de video.