

Video over robotwerk
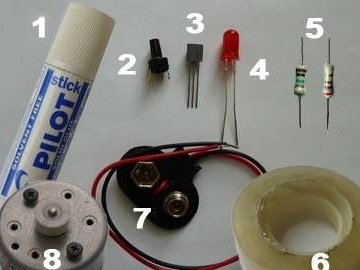
Materialen en tools voor het maken van een robot:
- droge lijmstift;
- transparante tape;
- twee-pins niet vaste knop;
- een knipperende LED type ARL-513URC-B;
- transistor type KP505A;
- twee weerstanden met een nominale waarde van 1M en 270 Ohm;
- clip-connector voor aansluiting op een batterij van het type "Crown";
- motormodel RF-300CA-D / C 3V of vergelijkbaar.

Functionaliteit en kenmerken van de robot:
Op de foto ziet u al gemonteerd de robot. Om het apparaat te verplaatsen, wordt slechts één motor gebruikt, deze is verticaal geïnstalleerd, maar onder een bepaalde hoek. Bij het bewegen in een kort segment beweegt de robot in een rechte lijn en maakt een boog op een langer gedeelte.
Een knop wordt gebruikt om de robot aan te zetten; wanneer hij wordt ingedrukt, gaat de robot 20 seconden aan. Daarna vindt er een automatische uitschakeling plaats en blijft de robot stand-by tot de volgende activering.
Een ander kenmerk van de robot is dat hij automatisch stopt aan de rand van de ring. Het voldoen aan deze voorwaarde is mogelijk als het gewicht van de tegenstander niet minder is dan het gewicht van de robot en de ringdikte niet minder is dan 3 mm.
Hier wordt een 9 Volt batterij als stroombron gebruikt, deze is bovenop de robot gemonteerd. Dankzij het extra gewicht verzamelt de robot de nodige kinetische energie voor de nodige acties.
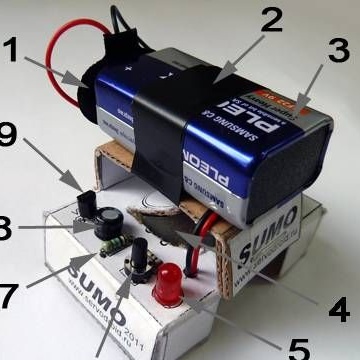
Op de afbeelding zijn de robotonderdelen gemarkeerd met cijfers:
1. Clip voor het aansluiten van de accu.
2. Batterijvergrendeling.
3. Stroomvoorziening (9 V batterij).
4. De motor.
5. Knipperende LED (geeft aan dat de stroom is aangesloten).
6. Knop om de robot in te schakelen.
7. Weerstand, dankzij dit kunt u de tijd van de robot instellen.
8. Condensator, hij is ook verantwoordelijk voor de tijd van de robot.
9. Transistor type KP505A, het is een motor driver.
Robot montageproces:
Eerste stap. We maken de zaak
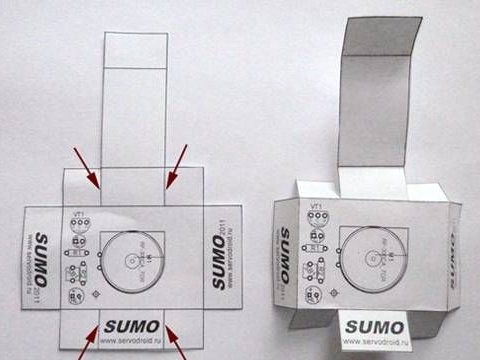
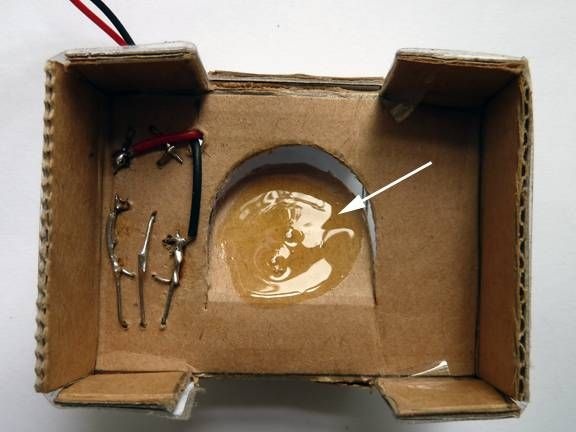
Om de case te maken, gebruikt de auteur een golfkarton, je moet er een contour op aanbrengen volgens de sjabloon. De sjabloon kan op een printer worden afgedrukt, deze is aan het artikel bevestigd. Verder kan het patroon, na het maken van de nodige vouwen, langs dikke lijnen worden gesneden. Om de motor te installeren, moet je een halve cirkel in het karton snijden en het een beetje buigen, zoals aangegeven op de foto.


Stap twee Installatie van radio-elementen
In de volgende fase moet je alle benodigde radio-elementen installeren. Om dit te doen, moet je een priem nemen en gaten in het karton maken, ze moeten in ronde markeringen worden gedaan. Om de componenten vast te zetten, moeten ze na installatie lichtjes worden gebogen. Je kunt het merkteken ook zien in de vorm van een vizier op het karton, hier moet je een groot gat maken, er zal een stroomdraad doorheen gaan.
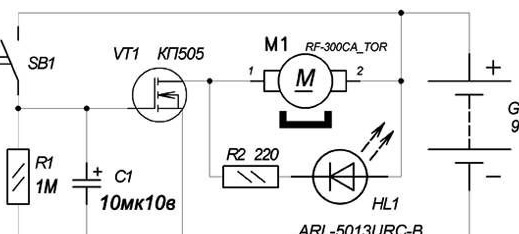
Daarna kunt u een soldeerbout nemen en beginnen met het aansluiten van de contacten van de radio-elementen volgens het schema.





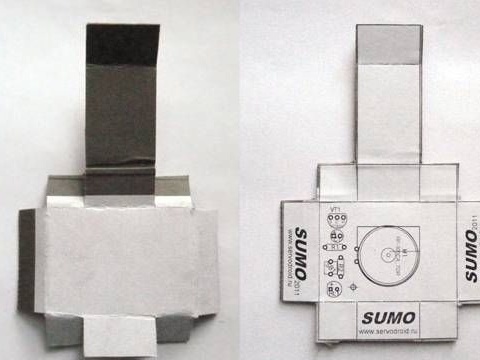
Stap drie We repareren de onderste zijvlakken
In dit stadium kunnen de onderste zijvlakken worden samengevoegd. Om dit te doen, moet je de onderste vlakken buigen en ze vervolgens bevestigen met transparante tape. Ook op de foto zie je de elementen van de case schuin omhoog staan, deze zijn nodig om de accu te repareren.


Stap vier Sluit randapparatuur aan
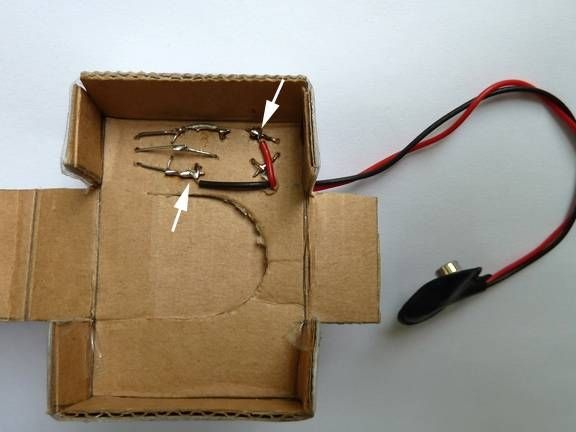
Om de batterij van stroom te voorzien, moet u een clipconnector gebruiken. De draad moet door het gat worden geleid, rood is gesoldeerd aan het positieve contact van de LED en zwart aan de min van de condensator C1.
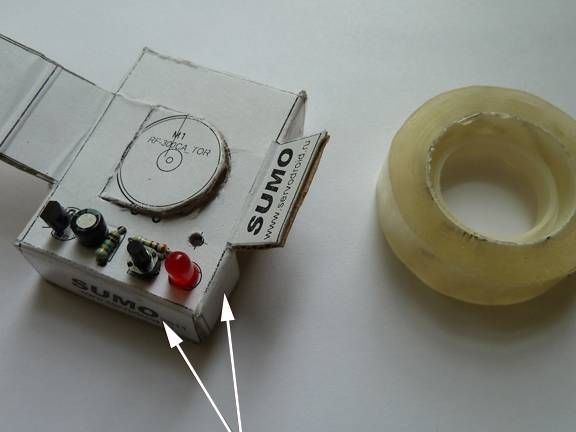
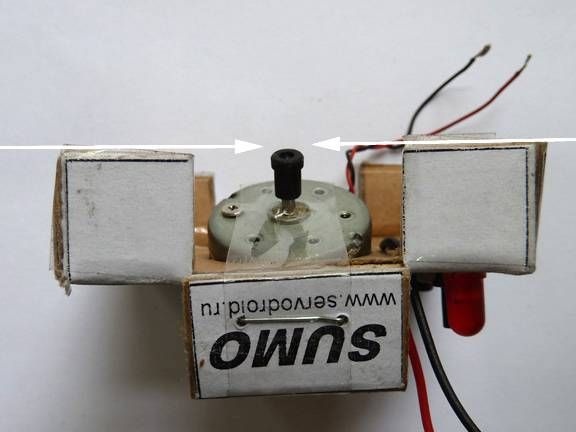
Vervolgens moet u de linker- en rechterkant verbinden, als resultaat moet de letter "P" worden verkregen. Voor een betrouwbare bevestiging van de elementen wordt een beugel van de nietmachine gebruikt. Waar de beugels moeten worden geïnstalleerd, wordt aangegeven met een witte pijl. Klemmen kunnen met een tang worden vastgeklemd.


Stap vijf Installeer en sluit de motor aan
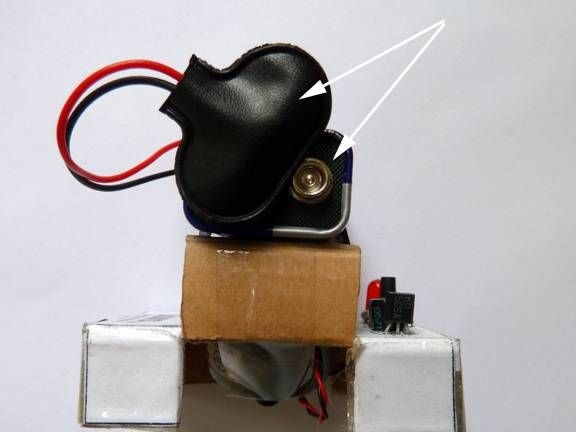
Om de robot recht te laten bewegen, moet zijn as in een bepaalde hoek met het oppervlak staan. Met andere woorden, de robot zal op de zijgedeelten staan en zijn as zal alleen in contact komen met het oppervlak. Om ervoor te zorgen dat de robotas een goede grip heeft, moet je er een elastische band om doen, dit kan een cambric zijn of een rubberen houder van een heliumpen.
De motor is op lijm gemonteerd, de plaats van smering is gemarkeerd met een witte pijl. Na het aanbrengen van de lijm moet u even wachten tot het stroperig wordt, anders kan er vloeibare lijm in de motor komen en deze verpesten.
Voor extra bevestiging is de motor omwikkeld met tape.


Wat betreft de hoek van de robot, dan is dit alles duidelijk zichtbaar op de foto's. Na installatie moet de motor worden aangesloten. De ene pin is verbonden met de min en de andere met de afvoer van de transistor VT1.


Stap zes De laatste montagefase
De batterij is gemonteerd op een U-vormig frame, de batterij is vastgezet met isolatietape. Het frame is zo doordacht dat het naast de ondersteuning ook een schokbreker is voor de accu. Als de robot volledig moet worden losgekoppeld van de voeding, kunt u één draad van de batterij loskoppelen.
Nou, tot slot, voor de wedstrijd heb je een ring nodig, deze is tweelaags gemaakt, met een dikte van minimaal 3 mm. Als niet aan deze voorwaarde wordt voldaan, kan de robot niet stoppen aan de rand van de ring. De diameter van de ring moet 250 mm zijn. De onderste laag bestaat uit dun golfkarton en de bovenste uit zwart dun karton. Beide lagen moeten aan elkaar worden gelijmd. De montage is voorbij, u kunt aan de wedstrijd beginnen. De winnaar is de robot die in de ring blijft.