

In de video kun je zien hoe de robot werkt. Het verandert geleidelijk van kleur tijdens gebruik.

Materialen en gereedschappen voor het monteren van de robot:
- U-vormige montagebeugels;
- elk vier 1.5V LR44-batterijen;
- meerkleurige RGB-LED met schakelfunctie;
- isolerende buizen;
- stalen punaise;
- laagspanningsmotor type RF-300CA;
- knop om de robot aan te zetten (met twee kabels);
- draden voor het aansluiten van de motor;
- knipperende alarm-LED.
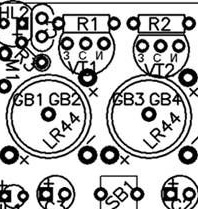

Wat betreft het noodzakelijke elektronisch elementen, worden ze weergegeven in de afbeelding. De printplaat is gemaakt van een folielaag van PCB, de afmetingen zijn slechts 30X30 mm. De auteur beveelt ook het gebruik van kleine polaire condensatoren aan voor montage.
Productieproces van de robot
Eerste stap. Schematisch diagram van de robot
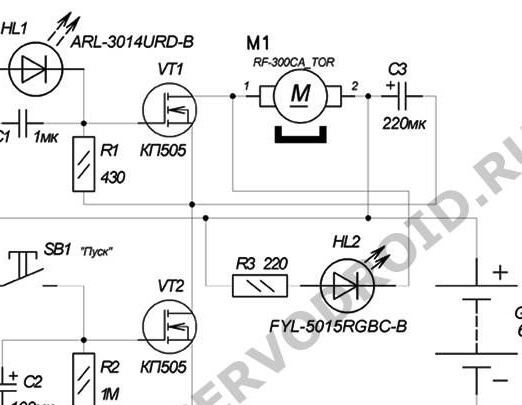
Het robotcircuit is te zien in de figuur. Nadat de batterij is geplaatst, staat de robot in de uit-stand. Druk op de SB1-knop om hem in te schakelen. Onmiddellijk daarna wordt condensator C2 onmiddellijk opgeladen. De positieve plaat van de condensator is verbonden met de poort van de veldeffecttransistor VT2. In dit opzicht, wanneer de schakeldrempel wordt bereikt, neemt de weerstand van het afvoerkanaal van dit kanaal onmiddellijk af en vormt zich een negatieve potentiële lading bij de afvoer. Welnu, wat er daarna gebeurt, is in meer detail te zien in het diagram.
Stap twee Monteer RGB LED
De LED onder nummer 1 is op de printplaat gemonteerd. In de tekening wordt deze positie HL2 genoemd. Nadat de LED is geïnstalleerd, moeten de conclusies worden gebogen zodat de LED naar de zijkant is gericht. Dus tijdens bedrijf zal de LED niet oplichten, maar opzij, de muren verlichten. In welke richting het licht gaat schijnen wordt aangegeven met een zwarte pijl.

Stap drie Monteer de batterijmontagebeugels
Om contact te maken tussen de batterij en de robot, worden push-pins gebruikt.Eén knop is in het midden geïnstalleerd, in het diagram is deze gemarkeerd als GB1, GB2 en de tweede is ingesteld op GB3, GB4. Om de contacten goed vast te zetten, worden de knoppen met een grote hoeveelheid soldeer gesoldeerd.


Batterijen zijn geïnstalleerd op de metalen knop onder nummer 3. De batterijen zijn bevestigd met een U-vormige sluiting, waarop isolatoren van buizen worden gedragen. Het bovenste deel van de beugel moet lichtjes worden gebogen met een boog naar beneden, hierdoor kunnen de batterijen tegen het onderste contact worden gedrukt. Er zijn isolerende buizen nodig zodat de verticale vlakken van de batterijen niet in contact komen met horizontale.
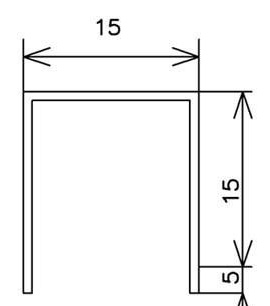
Om een U-vormige sluiting te maken, heb je twee paperclips nodig. Ze moeten worden gebogen in een U-vorm, zoals aangegeven op de tekening. Alle buizen kunnen worden gebruikt, hier wordt polyvinylchloride gebruikt. Hun hoogte moet gelijk zijn aan de hoogte van de batterijen.
Installeer de beugel door te solderen, hiervoor moet u de uiteinden vertinnen. Voor vertinnen is het noodzakelijk om een neutrale, niet-wasbare flux te gebruiken.
Stap vier Installeer de motor
De motor is geïnstalleerd aan de zijkant van het bord waar de sporen passeren, deze bevindt zich met de as naar beneden. Om de motor vast te zetten, kunt u hete lijm of dubbelzijdige tape gebruiken. Maar voordat u de motor stevig monteert, moet u deze aansluiten en het hele systeem op bruikbaarheid controleren.

Stap vijf Instellen en testen zelfgemaakt
Na het monteren van de robot kun je testen en configureren. Om dit te doen, moet u batterijen in de robot installeren, ze worden geïnstalleerd in plaats van GB1, GB2 en GB3, GB4. In dit geval moet de elektronica zijn uitgeschakeld. Na het plaatsen van de batterijen kan de robot aangezet worden, dit doe je met de SB1 knop. Nadat u erop hebt gedrukt, moet de motor beginnen te werken, de HL1-led knippert en de RGB-led gaat ook branden.
Na enige tijd wordt de robot automatisch uitgeschakeld, stopt hij en gaan alle diodes uit. Het wordt dan op dezelfde manier ingeschakeld als voor de eerste keer, door op een knop te drukken.

Om de tijd van de robot aan te passen, moet je experimenteren met de waarden van weerstand R2 en condensator C2, zij zijn verantwoordelijk voor deze functie. Als u de maximale werking van de robot moet instellen, moet de capaciteit van de condensator zo groot mogelijk zijn. Op zo'n simpele manier kun je zo'n interessante robot in elkaar zetten.