Tijdens zijn opleiding speelde de auteur spelletjes met accelerometer-ondersteuning op zijn telefoon. Hij hield echt van autorijden aan de telefoon door simpelweg te kantelen, en toen begon hij ervan te dromen om in het echte leven een auto te maken met dezelfde bediening. Nu heb Arduino en nadat hij programmeervaardigheden heeft opgedaan, is het tijd om een beheerde machine op Android te maken, noemde hij het Hercules.
Ze kreeg deze naam vanwege het enorme koppel en de hoge snelheid. Model kan worden bediend met een Android-telefoon via Bluetooth. Elke telefoon met dit besturingssysteem is geschikt voor bediening, de auteur beperkt niet één afstandsbediening. Ook bespaarde het gebruik van de telefoon geld, omdat ik geen geld hoefde te besteden aan het maken van een afstandsbediening.
Materialen en gereedschappen:
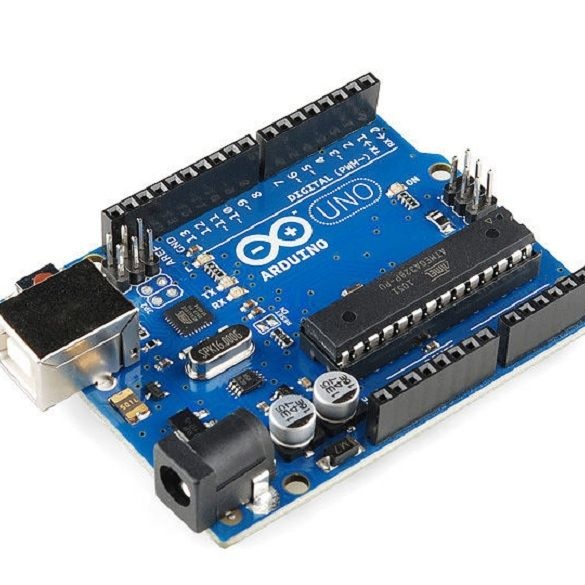
- Arduino Uno
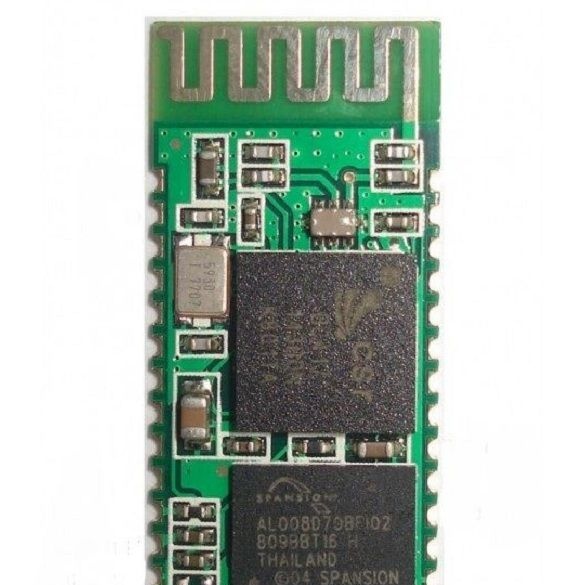
- Bluetooth-zendontvanger
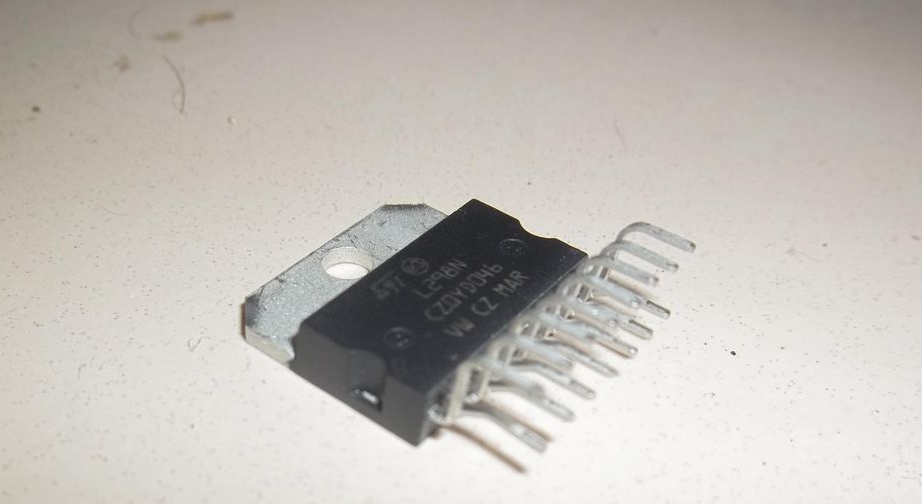
- Dual engine driver (met L298 H-brug)
- Motoren met versnellingen 4 stuks (vermogen wordt geselecteerd afhankelijk van de toepassing van de machine)
- Wielen 4 stuks
- Batterij 1Ah SLA 12V
- Basis voor componenten (chassis)
- broodplank
- Dozen voor huisvesting 4 stuks
- SPST-schakelaar
- Aansluitdraden voor Arduino
- Soldeerdraden
- Kleine moeren en schroeven
- Weerstand 10 kOhm 1 st
- Weerstand 20 kOhm 1 st
- Android-telefoon
- soldeerbout
- soldeer
- soldeerpasta
- boren





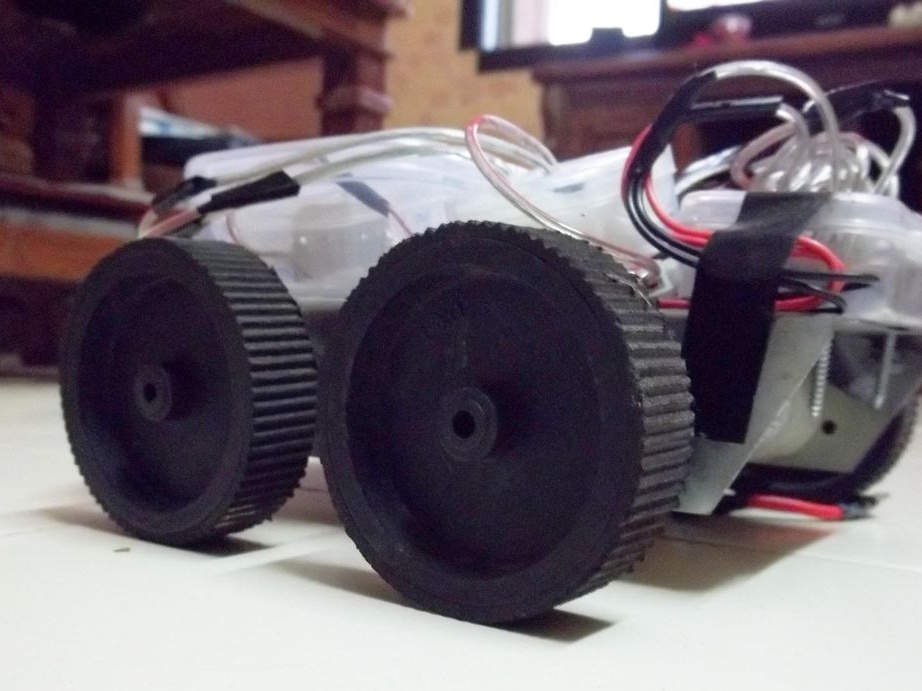
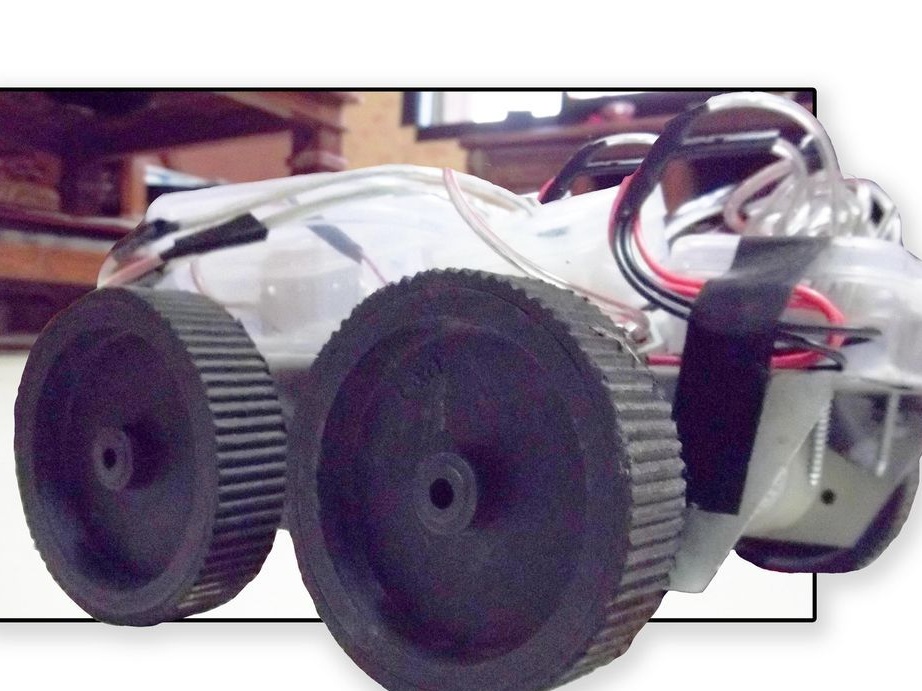
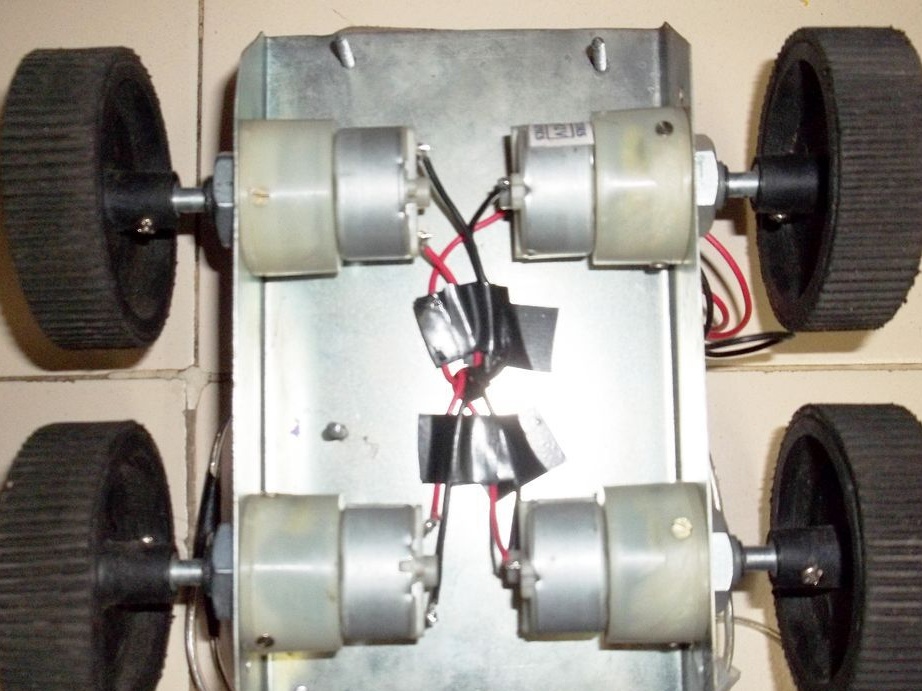
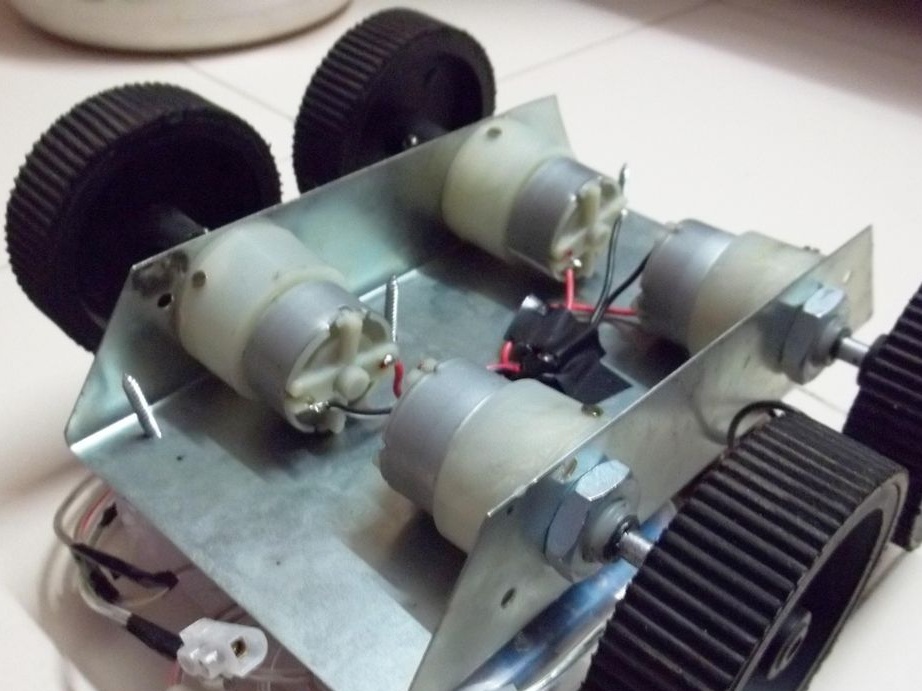
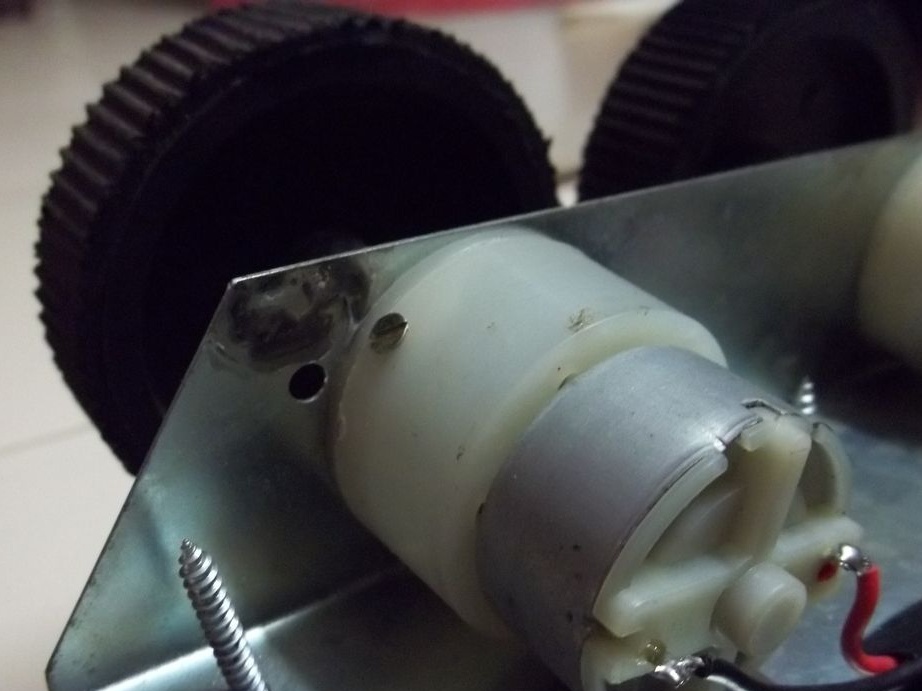
Eerste stap. Wielen en chassis.
De motorschroeven maakten het gemakkelijk om ze met moeren op het chassis te installeren. De wielen zijn helemaal tot aan de motoras gemonteerd. Twee rechtermotoren worden parallel aan elkaar ingeschakeld, evenals twee linkermotoren. Hoe het chassis eruit ziet na het installeren van vier wielen en motoren is te zien op de onderstaande foto.
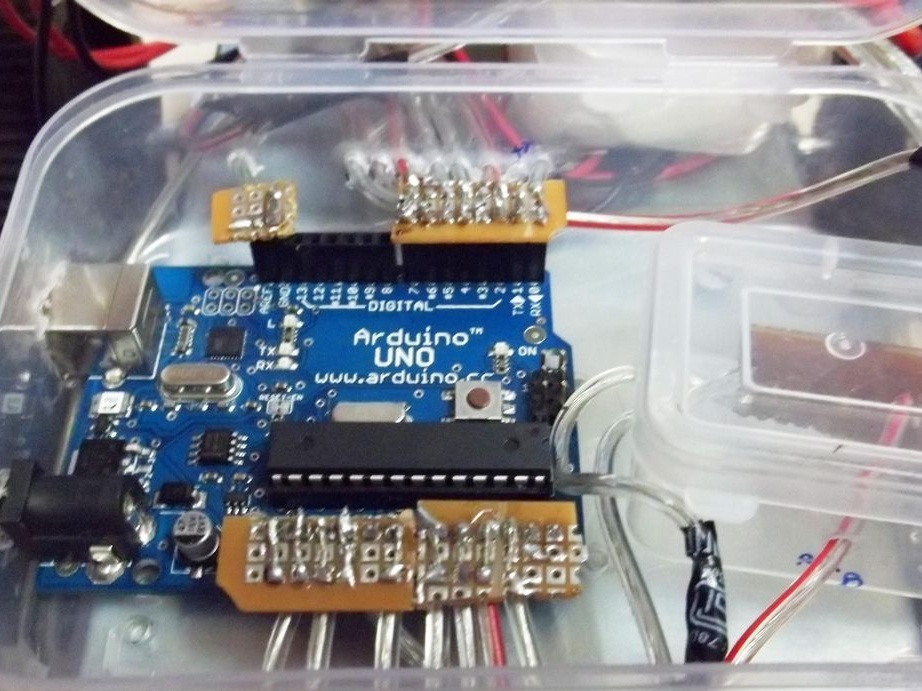
Stap twee Behuizing voor Arduino.
Het casusdiagram voor de Arduino is verdeeld in verschillende delen. Een dergelijke modulaire ontwerpoplossing zal in de toekomst helpen het circuit te ondersteunen of een mogelijke storing te elimineren. Als een van de componenten kapot gaat of doorbrandt, kan deze snel worden vervangen, zonder het ontwerp te breken. De box voor Arduino is als volgt gemaakt:
- Vier delen zijn uit het breadboard gesneden, twee met gaten van 8x3, de tweede twee delen met 6x3.
- BLS-pinnen werden aan elk bord aan de lange zijde gesoldeerd.
- Elke pin op het breadboard werd extra gesoldeerd met draden van ongeveer 10 cm lang, dit werd gedaan zodat de draden niet van de Arduino zouden komen, omdat de belasting nu gelijkmatig begon te worden verdeeld.
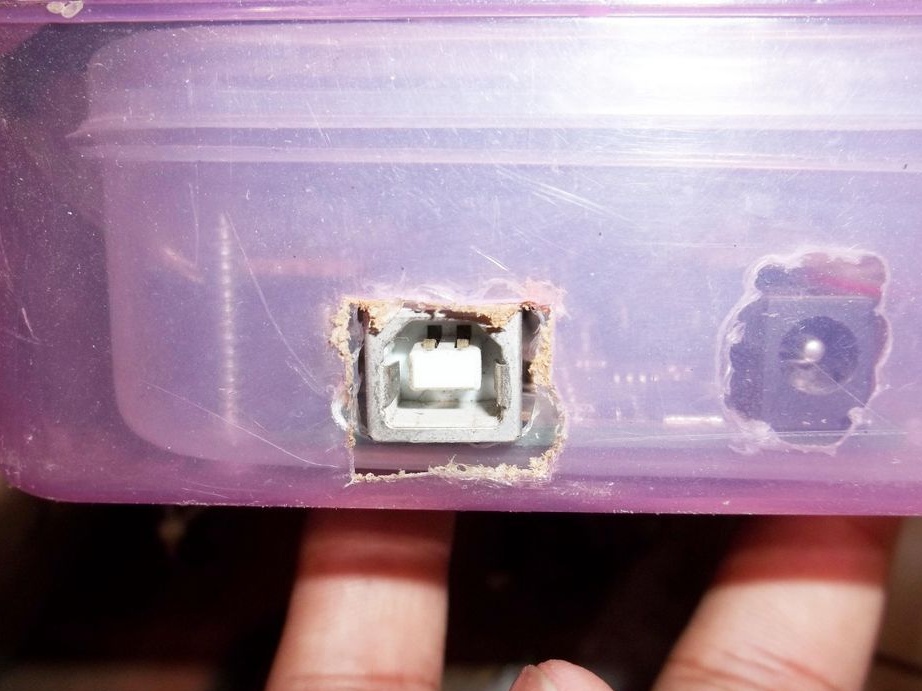
- Vervolgens werd het Arduino-bord in de behuizing geplaatst zodat de USB-uitgang de muur raakte. Er is een gat gemaakt voor deze uitvoer, dit zal helpen om extra programma's in de machine te laden of om bestaande programma's te corrigeren. Aan de zijkanten van de doos zijn gaten gemaakt voor de draden die van het bord zouden gaan. Extra gaten zijn uitgesneden aan de onderkant van de doos, onder de Arduino-montageconnectoren.


Stap drie Bluetooth-zendontvanger.
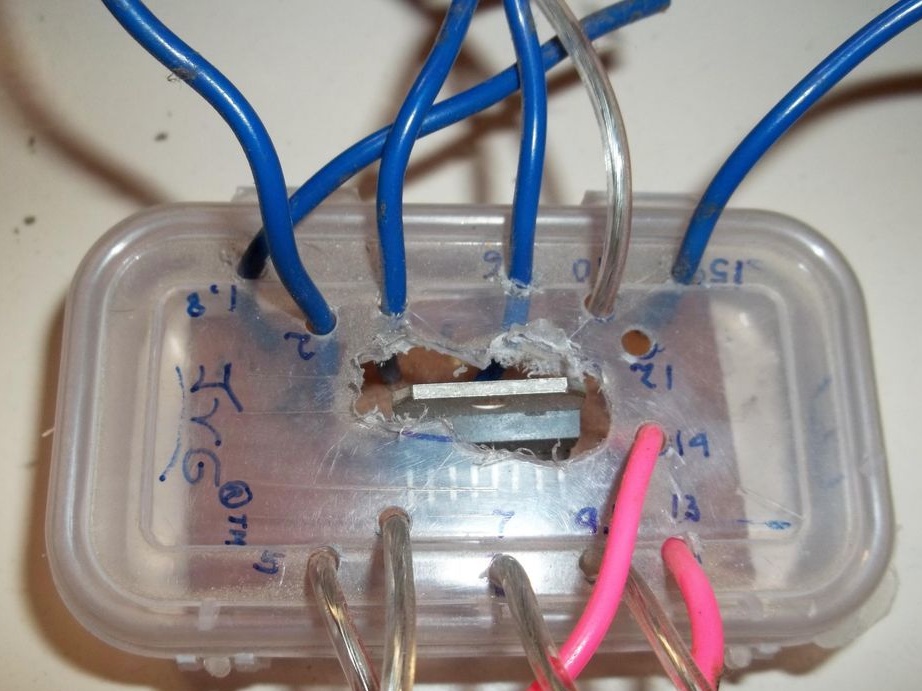
Het solderen van draden aan een Bluetooth-transceiver is de moeilijkste taak bij het samenstellen van dit project, de auteur miste echt een derde hand bij het solderen. Er werden vier geleiders van 10 cm lang gebruikt, deze werden gesoldeerd op pennen 1 (Tx), 2 (Rx), 12 (+ 3.3B) en 13 (GND). Nu kon de transceiver in een behuizing worden geplaatst met vooraf voorbereide gaten voor de draden. De auteur heeft de draden aan de doos gelijmd om te voorkomen dat de draden de contacten afscheuren.



De vierde stap. Behuizing voor weerstanden.
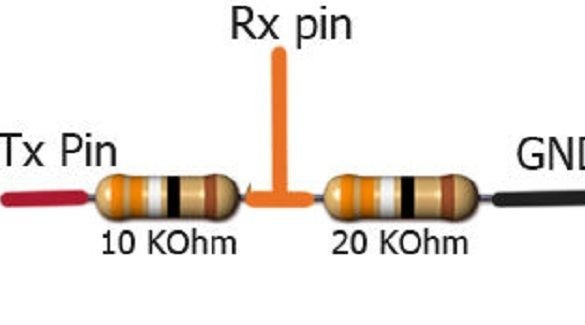
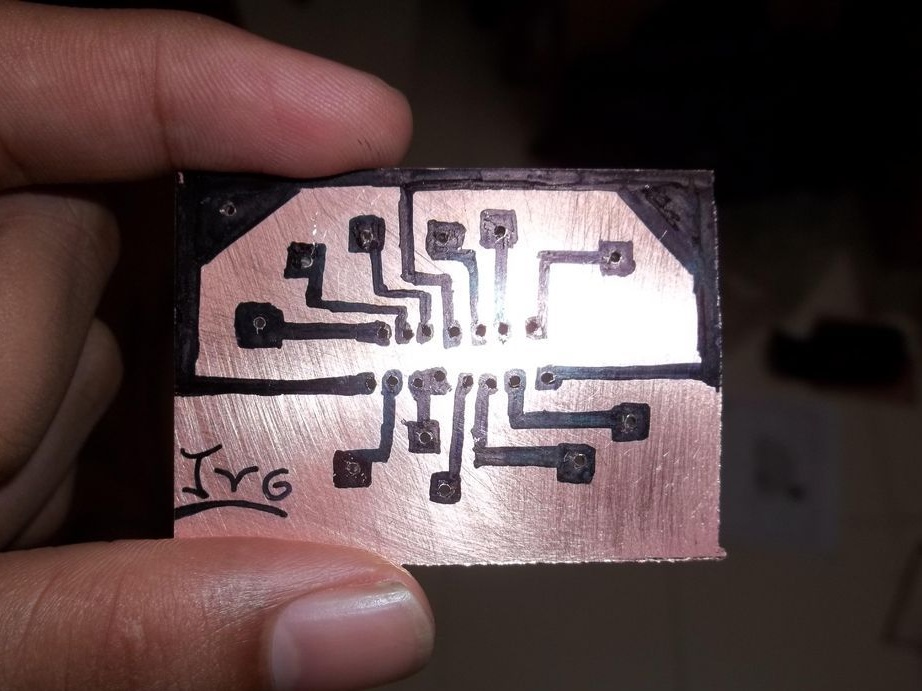
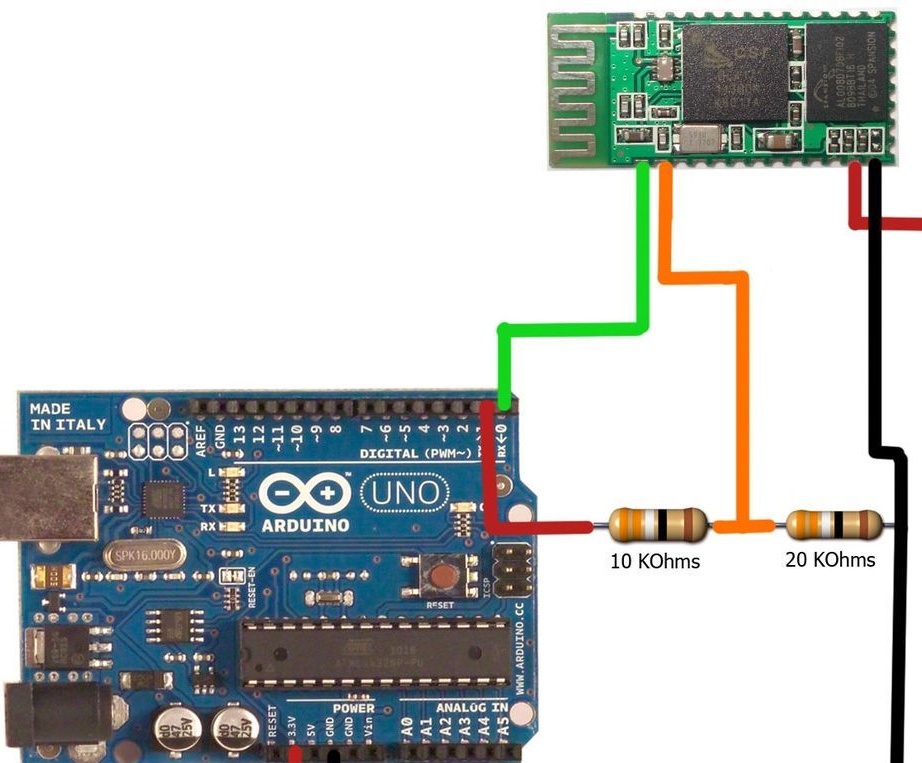
Omdat de Arduino Tx-uitgang een signaal met een spanning van 5V verzendt en de Bluetooth-module met een spanning van 3,3V werkt, was het nodig om 5V naar 3,3V te converteren. Voor deze taak gebruikte de auteur een spanningsdeler. Volgens het onderstaande circuit soldeerde hij een weerstand op het resterende stuk van de breadboard. Natuurlijk was het mogelijk om dit circuit in een Arduino-behuizing te plaatsen, maar er was niet genoeg ruimte, dus de auteur maakte een apart exemplaar voor de weerstanden.


Stap vijf Motor bestuurder.
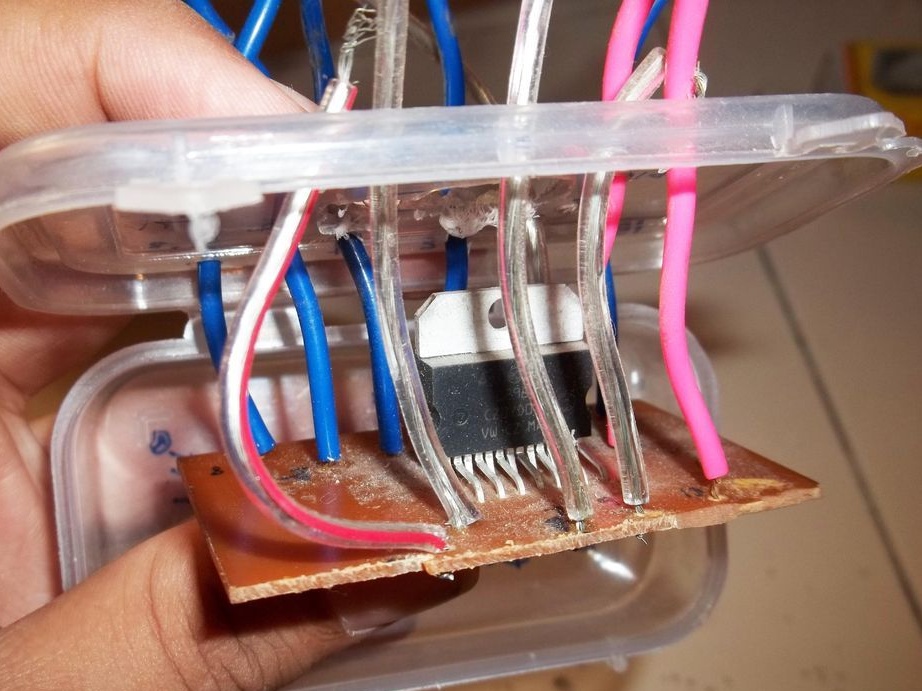
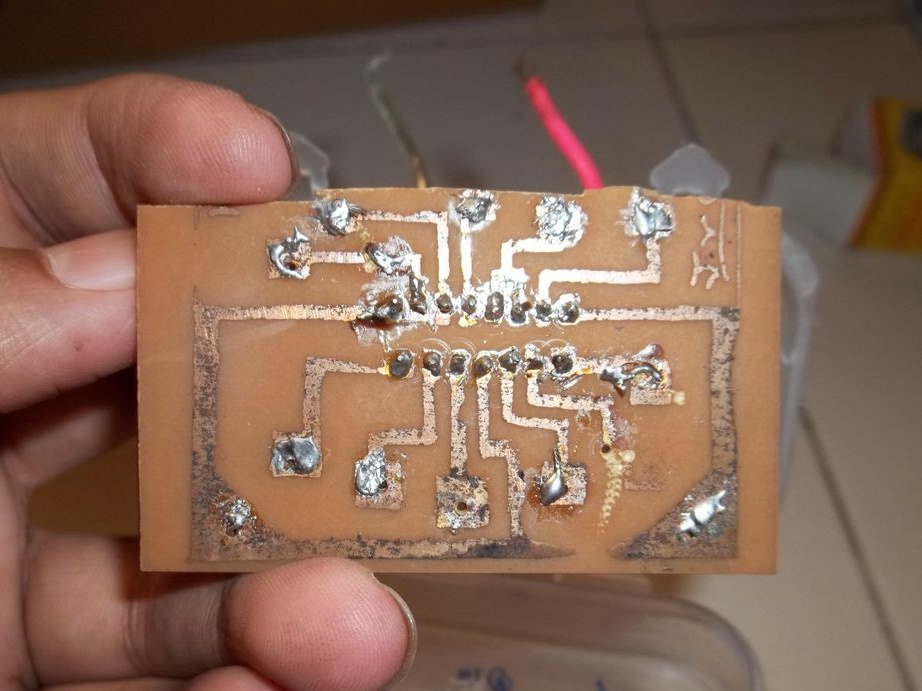
De auteur gebruikt een dubbele driver met een H-bridge L298 IC, hij bestuurt vier motoren. Voor hem heeft de auteur een bord gemaakt om het solderen van draden aan hem te vergemakkelijken, het bord zelf op de onderstaande foto. Na het solderen werd de driver ook in een aparte koffer met gaten voor de draden geplaatst.
Stap zes De eindmontage.
Elk afzonderlijk onderdeel wordt volgens het schema op de Arduino aangesloten.
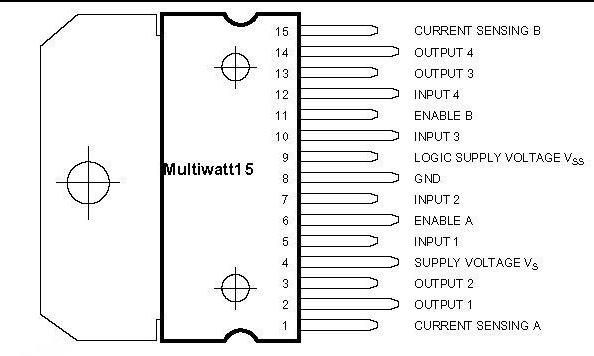
Het verbinden van de motordriver met Arduino verliep volgens deze pinout:
1 tot GND
2 naar het eerste contact van de linkermotoren
3 naar het tweede contact van de linkermotoren
4 naar een 12V-batterij
5 om Arduino 2 vast te pinnen
6 naar de pin Arduino 3
7 om Arduino 4 vast te zetten
8 naar GND
9 tot 5V met Arduino
10 om Arduino 5 vast te pinnen
11 om Arduino 6 vast te zetten
12 naar de pin Arduino 7
13 tot het eerste contact van de juiste motoren
14 naar het tweede contact van de juiste motoren
15 tot GND
12V-voeding werd aangesloten op de Vin Arduino-pin en pin 4 van L298. GND Arduino respectievelijk naar GND-voeding.
Zevende stap. Programma voor Arduino.
Om het programma correct te laten werken, was het noodzakelijk om de Amarino-bibliotheek te installeren, die kan worden gedownload. U kunt de broncode voor Arduino onder het artikel downloaden.
Stap acht. Software voor Android
Amarino Library is een toolkit voor het werken met Android-smartphones. Door een extra applicatie op uw telefoon te installeren, kunt u beginnen met het schrijven van een programma.
Amarino-app en plug-in kunnen worden gedownload van. Nadat ze op de telefoon waren geïnstalleerd, bleef het alleen over om de machine in te schakelen en er verbinding mee te maken, en het gedeelte Gebeurtenissen toevoegen-> Versnellingsmeter sensor te selecteren.
Video met het installeren van Amarino en zijn plug-ins:
De snelheid van de machine is gelijk aan de kracht van de telefoon. Als de machine in de verkeerde richting beweegt, moet u de draden van de motoren verwisselen.