
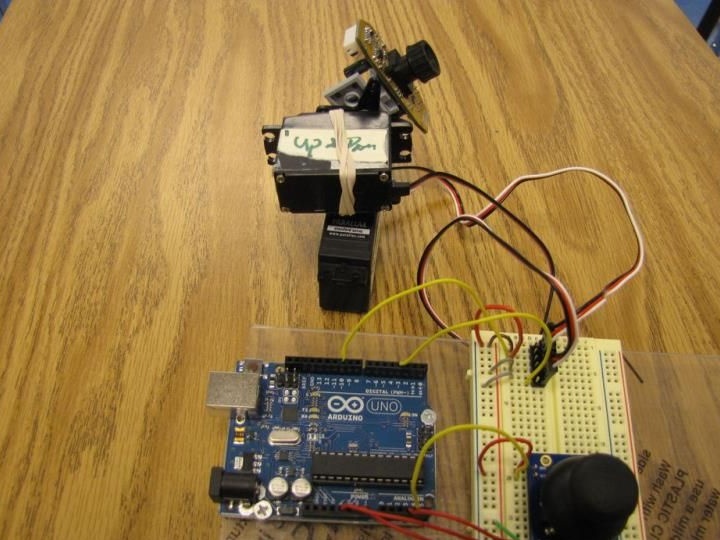
Materialen en gereedschappen:
- microcontroller Arduino (hierin zelfgemaakt past Arduino Uno Rev 3 toe);
- Twee servo's van Parallax;
- joystick (ook van Parallax);
- printplaat) klein);
- connectoren voor aansluiting;
- Een apparaat om de beweging van servomotoren te volgen (een kapotte webcam en legoblokjes worden gebruikt).
Zelfgemaakt montageproces:
Eerste stap. We verbinden servomotoren
Het zelfgemaakte montageproces begint met het aansluiten van de servomotoren. Om een voorlopige lay-out samen te stellen, wordt een printplaat gebruikt. Dan is het mogelijk om een apart schild te maken. In de figuur is te zien hoe precies alles met elkaar is verbonden.
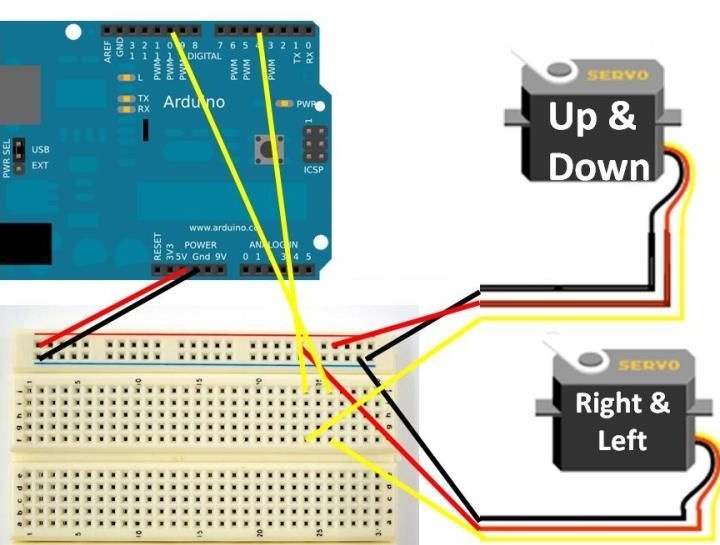
De rode kabel is de kracht, deze wordt aangesloten op de 5V-pin op de Arduino-controller.
De zwarte draad is een min (aarde), deze maakt verbinding met de Arduino-uitgang genaamd GND.
De gele kabel van de rechter en linker servomotor moet worden aangesloten op pin 11. Bij sommige modellen kan deze wit zijn.
Een vergelijkbare gele Up & Down-kabel moet worden aangesloten op pin 4. Deze kan ook wit zijn op sommige motormodellen.
Het is belangrijk om te onthouden dat de signaalconnectoren die worden gebruikt om de motor te besturen, afkomstig zijn van de PWM-uitgangen.
Stap twee Sluit de joystick aan
Op de afbeelding is te zien hoe de joystick is aangesloten. In eerste instantie lijkt het schema misschien nogal ingewikkeld, maar in feite is hier niets ingewikkelds. Net als bij motoren wordt hier een printplaat gebruikt.
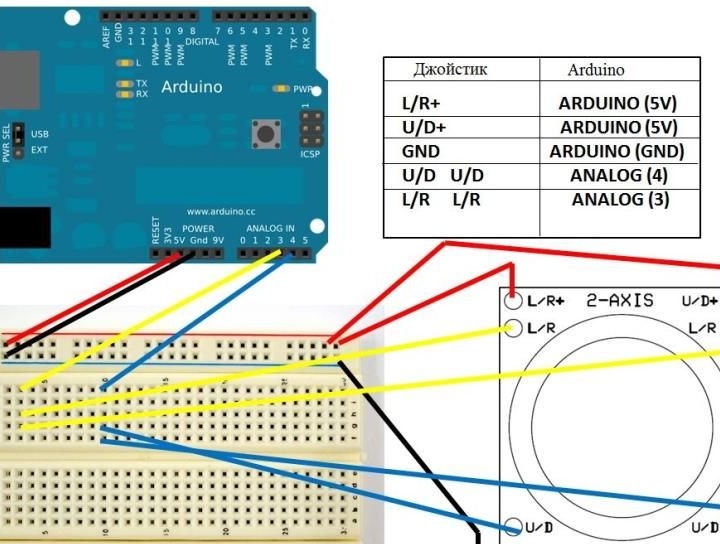
1. Op de joystickmodule vind je de uitgangen U / R + en L / R +. Via deze uitgangen wordt stroom aangesloten. Dienovereenkomstig moet u + 5V-spanning van de overeenkomstige pin op de Arduino toepassen.
2. Er zijn ook twee connectoren onder de joystick genaamd L / R en twee U / D-connectoren. Ze moeten worden aangesloten op de analoge uitgangen A3 en A4.
3. Nou, tot slot, de aarde op de joystick moet verbonden zijn met de aarde op de Arduino.
Na montage moet de verbinding dubbel worden gecontroleerd. Door verbindingsfouten ontstaan in de meeste gevallen problemen. Dit geldt vooral wanneer een printplaat wordt gebruikt en er veel aansluitingen op zitten.
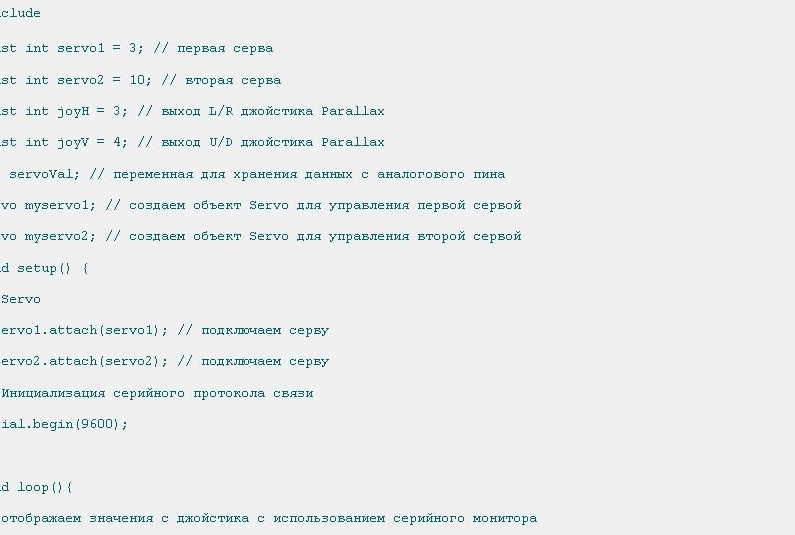
Stap drieSchets voor Arduino
De code is heel eenvoudig en bevat gedetailleerde opmerkingen. De bovenstaande code hoeft alleen maar naar de Arduino IDE te worden gekopieerd. Zodra de code is geladen, mogen de motoren niet meer bewegen. Ze mogen pas gaan bewegen als de knop op de joystick wordt ingedrukt.
Problemen die zich kunnen voordoen en hoe deze op te lossen
1. Als de motoren niet inschakelen, controleer dan nogmaals de verbinding. PWM-uitgangen worden gebruikt om motoren aan te sluiten, en analoge uitgangen worden gebruikt om joysticks aan te sluiten.
2. Het komt voor dat de motoren direct na het laden van de code beginnen te trillen. Dit gebeurt als u de pinnen U / D + L / R + verkeerd aansluit. Verbinding moet zorgvuldig worden gecontroleerd. Om het bord tijdens de test niet te verbranden, moet het worden losgekoppeld van de computer.
3. Als alles opnieuw is gecontroleerd, maar de motoren nog steeds niet willen werken, kunt u proberen de joystick opnieuw aan te sluiten. Het moet van de printplaat worden verwijderd en vervolgens met enige moeite worden teruggeplaatst. Joystick-connectoren moeten goed in de lay-out passen.
Als alles is gelukt, kunt u nu beginnen met het maken van zelfgemaakte items met bediening via de joystick. Je kunt bijvoorbeeld een robot maken die kan worden bediend met een joystick en nog veel meer.