

Pultoïden worden zulke robots genoemd die op afstand kunnen worden bediend met de afstandsbediening. Hiervoor kan bijvoorbeeld een afstandsbediening van een tv worden gebruikt. De belangrijkste taak die de auteur zichzelf heeft gesteld bij het maken van een dergelijke robot is de eenvoud van de montage. Overwogen de robot vereist geen fabricage van een printplaat, installatie is zeer eenvoudig en gebeurt gewoon op karton.

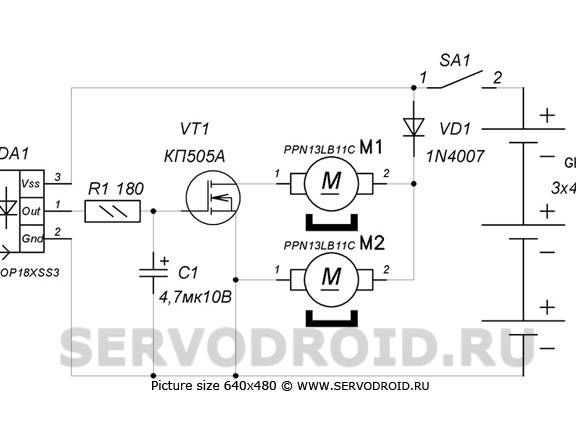
Elektronisch Het robotcircuit bestaat uit slechts vier componenten: een diode, een transistor, een fotodetector en een condensator. Voor de fabricage van het mechanische onderdeel is ook een minimum aan materialen nodig, er wordt bijvoorbeeld een CD-ROM gebruikt om de koffer te maken.
Een op deze manier gemaakte robot zal slechts één team begrijpen. Het is de moeite waard om op een willekeurige knop op het bedieningspaneel te drukken en de robot begint te draaien. Als je de knop ingedrukt houdt, wordt de rotatiehoek groter, waardoor de robot 360 graden kan draaien.
Robotapparaat
Een compact disc wordt gebruikt als basis voor de fabricage van de robot. Wat betreft de vermogenselementen, ze zijn bevestigd met M2-bouten. Het elektronische bord, ook het batterijvak, wordt met tape bevestigd.
Wat de motoren betreft, ze staan schuin en hun assen rusten tegen de weg. Het is dus niet nodig om de wielen afzonderlijk te vervaardigen. Bouten worden bevestigd met frames die zijn gemaakt van een schoollijn.
Drie “pink” -batterijen voeden de robot, deze zijn in een speciaal geval geplaatst. In totaal produceert de voeding 4,5 V.
En tot slot, de fotodetector, het is er hier maar één, het is een soort TSOP. Het ontvangt gemoduleerde signalen van elke afstandsbediening, waardoor de robot kan worden bediend.
Materialen en gereedschappen voor productie:
- nylon banden;
- fotodetector type TSOP1836;
- één veldeffecttransistor (KP505A);
- een compact disc;
- fular voor batterijen in drie secties;
- drie "kleine" batterijen;
- plastic liniaal;
- schroeven voor bevestiging van het frame;
- draden en schakelaar (cross-over type).
Fabricageproces:
Eerste stap. PCB-ontwerp
Om een printplaat te maken, moet je eerst een tekening op papier printen. Je zou twee foto's moeten krijgen, op een installatietekening en aan de andere kant van het bord. In totaal zal het bord uit drie elementen bestaan, in het midden zal aan beide zijden een golfkarton worden gelijmd met kantoorpapier. Om het bord te lijmen, wordt aanbevolen om een droge lijmstift te gebruiken.
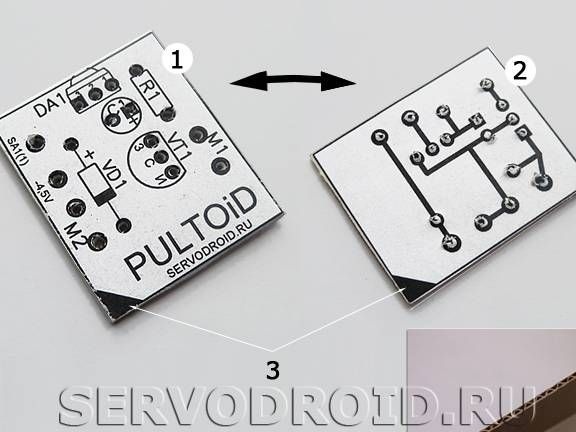
Stap twee Installatie van radiocomponenten
Bij het installeren van elektronische componenten is het belangrijk om de uitstekende randen van de contacten niet te vergeten of af te snijden. Vervolgens worden ze gebogen en ontstaat er een elektrisch circuit. Alle elementen zijn verbonden door solderen volgens het gespecificeerde schema.
Weerstand R1 in het circuit moet worden vervangen door een jumper. Wat betreft de fotodetector, de juiste volgorde van de aansluiting wordt ook getoond op de foto.

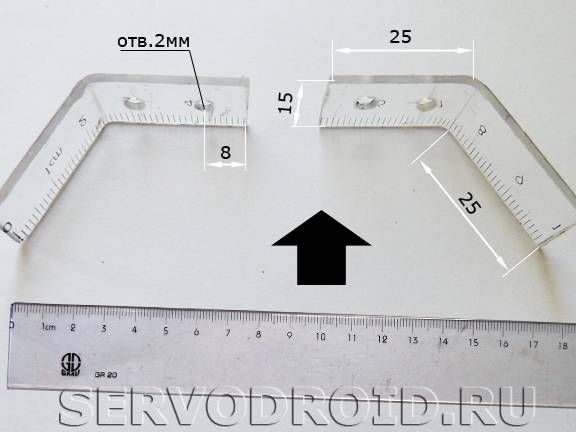
Stap drie Power Frame Installatie
Om de motoren te installeren, moet u een vermogensframe maken. Als materiaal zal hier een plastic schoolliniaal worden gebruikt. Het moet in twee delen worden gesneden en gebogen zoals aangegeven op de foto. Om de liniaal te laten buigen, moet u de hete soldeerboutpunt op een afstand van ongeveer 2 mm naar een plaats van afbuiging brengen. Ook voor deze doeleinden kunt u een bouwföhn gebruiken. De liniaal moet soepel worden gebogen tot een hoek van ongeveer 30 graden.

Nadat het frame is gemaakt, kunt u doorgaan met de installatie ervan. Neem hiervoor de CD en 2 mm schroeven met moeren. Verder worden op de juiste plaatsen gaten geboord met een diameter van minimaal twee millimeter en wordt het frame vastgezet met schroeven. Om ervoor te zorgen dat het frame niet wegglijdt, moet u voordat u het monteert dubbelzijdig plakband op de schijf plakken.
Stap vier De voorste steun installeren
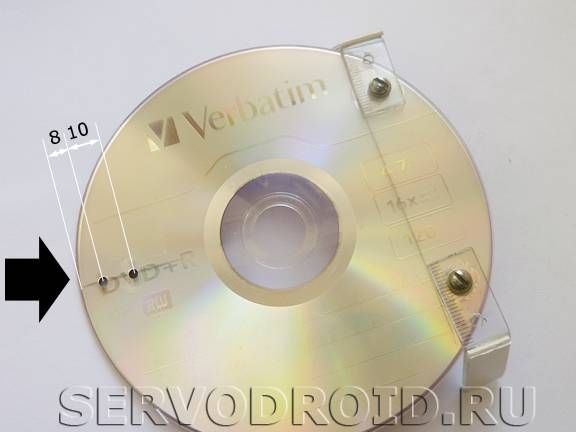
Aan de voorkant van de schijf moet je twee gaten boren en een nylon dekvloer voorbereiden. De afmeting van de dekvloer moet 3x150 mm zijn. Het moet worden geplaatst zoals aangegeven op de foto. Hierdoor zal de resulterende ondersteuning perfect afnemen tijdens het bedienen van de robot en glijdt over de weg.


Stap vijf Motor installatie
Om te voorkomen dat motorassen over de weg schuiven, moeten er beschermers op worden aangebracht. Ze zijn gemaakt van kauwgom, dat te vinden is op de pasta's van heliumpennen. Om de motoren te installeren, moet u eerst een stuk dubbelzijdig plakband op de steun lijmen, dit voorkomt uitglijden. Nou, dan worden de motoren eindelijk vastgezet met nylon banden.

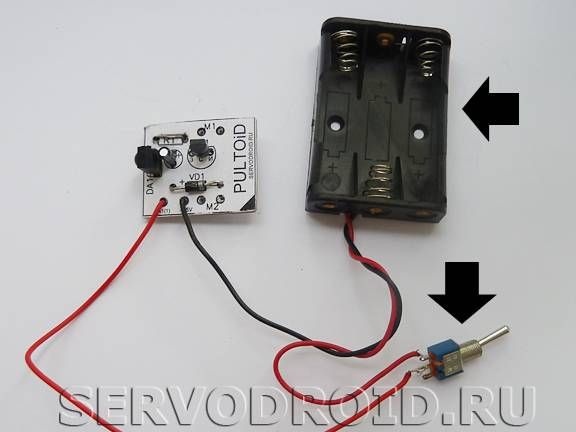
Stap zes Aansluiting schakelaar en voeding
Als stroombron kunt u elke batterij gebruiken waarvan de stroom niet hoger is dan 5 volt. In dit geval wordt een koffer gebruikt voor batterijen met drie vingers, die in totaal 4,5 V bedragen.
Wat de schakelaar betreft, deze is gemonteerd op de opening van het positieve contact dat afkomstig is van de stroombron. De rode draad is aan het bord bevestigd aan pin SA1 (1) en de zwarte aan pin -4,5V.


Ook in dit stadium kunt u de motoren aansluiten, hun draden zijn verbonden met de contacten M1 en M2.
Zevende stap. Laatste fase
In de laatste fase moeten alle elektronische elementen worden gerepareerd. Ze zijn met dubbelzijdig plakband op de schijf bevestigd. Wat de schakelaar betreft, deze moet ook worden vastgezet, hiervoor kunt u hete lijm gebruiken.

Dat is alles, nu is de robot klaar. Je kunt proberen het aan te zetten en een commando geven om het in te schakelen met elke afstandsbediening.