

Het is helemaal niet moeilijk en zelfs interessant om zo'n robot met je eigen handen te maken. Het resultaat is een zeer interessant apparaat dat zich als een levend wezen zal gedragen. Dit alles dankzij twee kleine motoren, zij zijn degenen die de robot aandrijven. Door de invalshoek van de motorassen te veranderen, kun je de robot sneller of langzamer maken. Je kunt ook experimenteren met verschillende tips die op de motoras kunnen worden gedragen.
Materialen en gereedschappen:
- twee kleine motoren (3 Volt, zit in kinderspeelgoed);
- houder voor batterijen (je kunt het zelf doen of uit de oude afstandsbediening, zaklamp etc. halen);
- twee schakelaars van het type SPDT (ze zijn verkrijgbaar bij een oude computermuis);
- twee kleine en één grote paperclip;
- een klein wieltje van het speelgoed;
- dunne bedrading

Fabricageproces:
Eerste stap. Soldeerbedrading
Allereerst moet u de draden voorbereiden en ze aan alle elektronische componenten solderen, zodat het later gemakkelijk is om de knooppunten aan te sluiten. De draden moeten op een lengte van 6 cm worden gesneden en ongeveer 1 cm van de uiteinden worden verwijderd.Nu moet u twee draden aan de motoren en de schakelaars solderen. Vergeet ook niet om de twee draden aan de contacten van de batterijhouder te solderen. Andere uiteinden van de draden zijn bij voorkeur vertind.

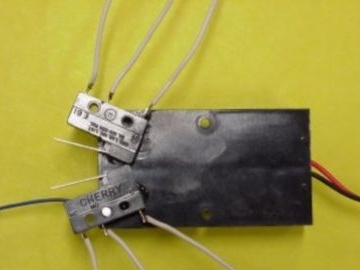
Stap twee Schakelaars instellen
Om de schakelaars in te stellen, moet de batterijhouder ondersteboven worden gedraaid. Nu moet je de schakelaars met lijm op de batterijhouder lijmen. Als gevolg hiervan zou de letter V moeten vormen.
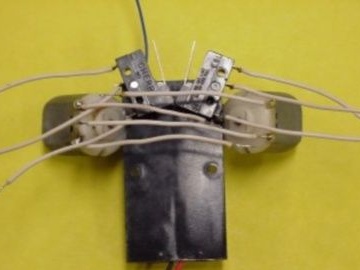
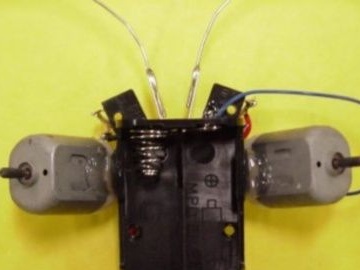
Stap drie Motor installatie
De motoren moeten schuin op de accuhouder worden bevestigd, zoals aangegeven op de afbeelding. De hoeken aan beide zijden moeten anders hetzelfde zijn de robot zal niet goed werken. De motorassen moeten tegen de weg rusten. Motoren kunnen met lijm worden gemonteerd.

Stap vier Installatie van het stabilisatiewiel
De stabilisator is nodig om zelfgemaakt stond plat op de weg. Om een wiel te maken, kun je een roller van een bandrecorder of een wiel van een kinderspeelgoed gebruiken. De "plug" is gemaakt van een lange paperclip of string.Kortom, de stabilisator kleeft gelijkmatig aan de batterijhouder.

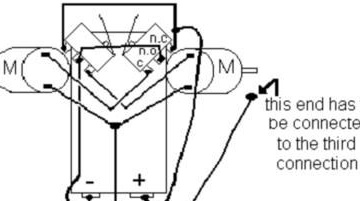
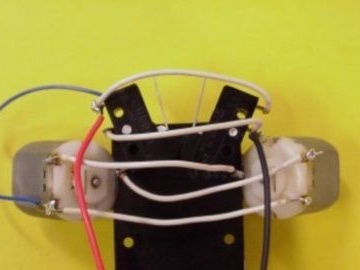
Stap vijf Bekabeling
Om de robot correct te laten werken, moeten alle draden duidelijk volgens het schema worden aangesloten. Het circuit is te zien op de foto.

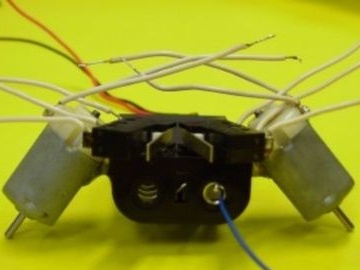
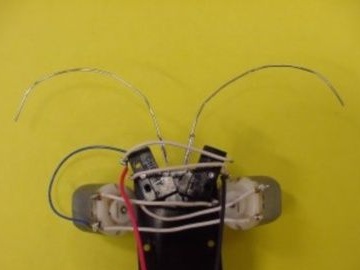
Stap zes Een snor maken voor de bug
De snor zal dienen als een wiel voor de kever, zodra een obstakel onderweg tegenkomt, zal de snor de schakelaars inschakelen en dan zullen de motoren de robot in een andere richting draaien. Wanneer de schakelaar wordt geactiveerd, wordt een van de motoren uitgeschakeld en wordt een soort differentieel geactiveerd. Als beide schakelaars zijn geactiveerd, stopt de robot volledig. De snor is gemaakt van kleine paperclips, deze moeten zorgvuldig worden vastgelijmd aan de knoppen van de schakelaars.

Zevende stap. Laatste revisie en testen van de robot
In de laatste fase moeten rubberen tips op de motorassen worden geïnstalleerd, ze zijn nodig voor een betere grip. Ze kunnen gemaakt zijn van cambric.
Dat is alles, de robot is klaar. Je moet het op een glad oppervlak laten lopen, bijvoorbeeld op een tafel of linoleum. Omdat de poten van de kever te klein zijn, kruipt hij niet langs het tapijt, hiervoor is het nodig om de punten op de motorassen te vergroten.
In de toekomst kan de robot naar eigen goeddunken worden geüpgraded. Zo kan hij LED-ogen maken die oplichten bij contact met een obstakel.