
Ik heb onlangs tientallen robots gebouwd, voornamelijk geïnspireerd op de wonderen van BEAM-robotica. Als je niet bekend bent met deze technologie, is BEAM een speciale methode voor het bouwen van robots met de nadruk B - biologie, E - elektronica (elektronica), A-esthetiek (esthetiek) en M - mechanica (mechanica). Dit is de afkorting BEAM. Wat deze technologie onderscheidt van andere benaderingen, is het gebruik van alleen stralingsenergie voor voeding (voornamelijk zonne-energie), de verwijdering van verschillende materialen (hergebruik) en minimalisme. Hoewel ik deze principes heb overgenomen, de mijne robots waren niet helemaal in de geest van BEAM (ze werden aangedreven door een batterij).
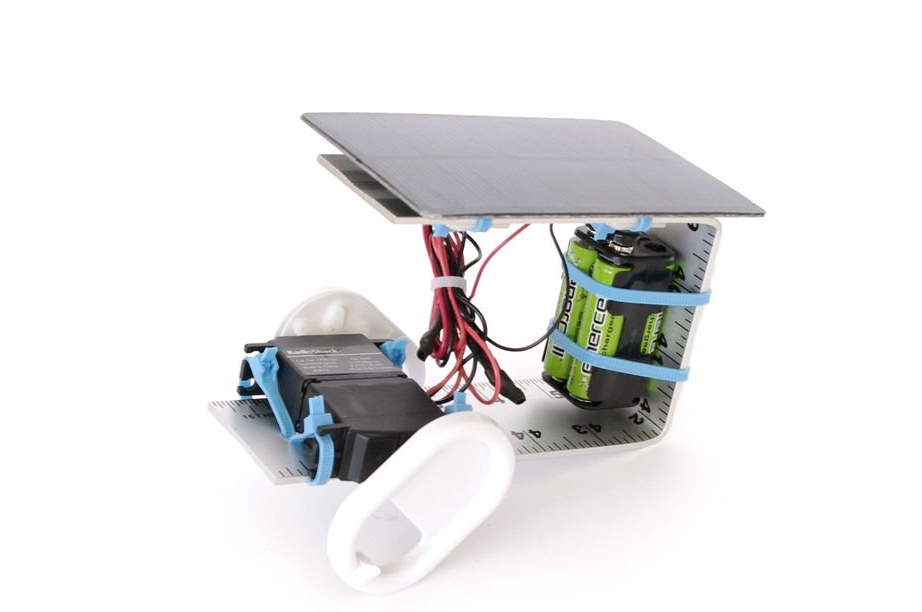
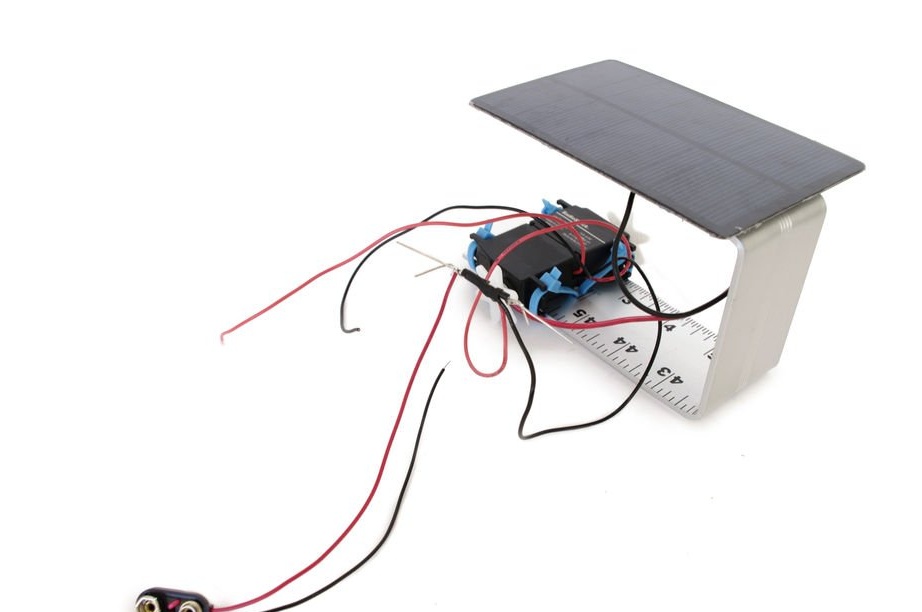
Omdat robotica van BEAM mij serieus inspireerde, wilde ik een robot op zonne-energie maken. Maar in plaats van gewoon een BEAM-robot te maken, besloot ik een zonnepaneel te integreren in de robot van mijn gebruikelijke stijl. In plaats van volledig door de zon te worden aangedreven, besloot ik oplaadbare batterijen in te bouwen. Dat wil zeggen, mijn robot kan worden aangedreven door een batterij of door een zonnepaneel, afhankelijk van welke stroombron momenteel krachtiger is. Het zonnepaneel laadt de batterijen ook op als er zonlicht op valt. Hierdoor kan de robot zowel in het licht als in de schaduw bewegen.
Ik denk dat deze aanpak met succes twee stijlen combineert, en dit is een interessant experiment in de constructie van robots.
Stap 1: Materialen
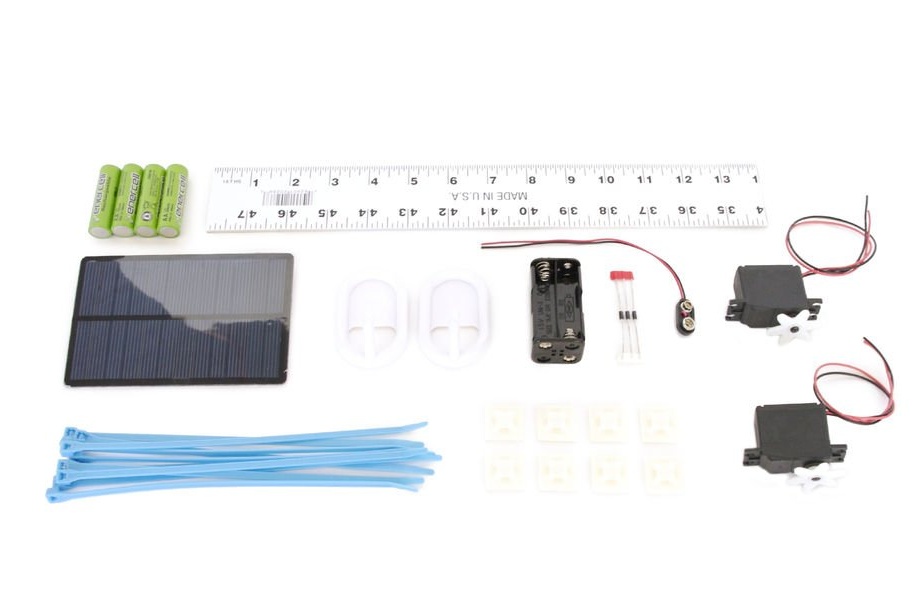
Je hebt nodig:
(x1) Zonnepaneel
(x2) Standaard servomotoren
(x3) Schottky-diodes 1N5817 - NTE578-equivalent
(x1) 9V batterij
(x8) Oplaadbare AA-batterijen
(x1) 8 x AA-batterij
(x12) Basis voor klemmen
(x1) Liniaal (30-50 cm)
(x2) Zelfklevende haken voor wandmontage
(x1) Plastic klemmen
(x1) Krimpkous
Stap 2: Wijzig de servo

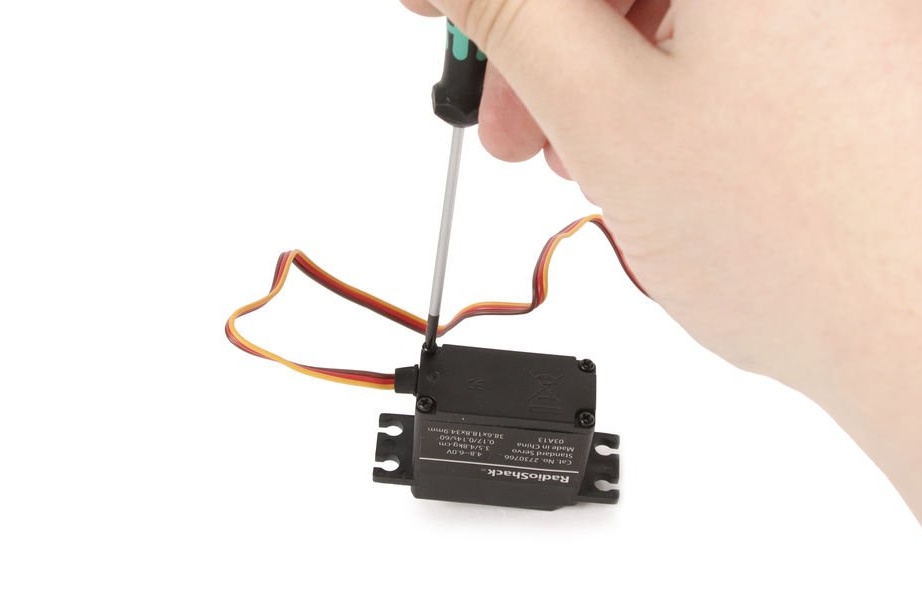
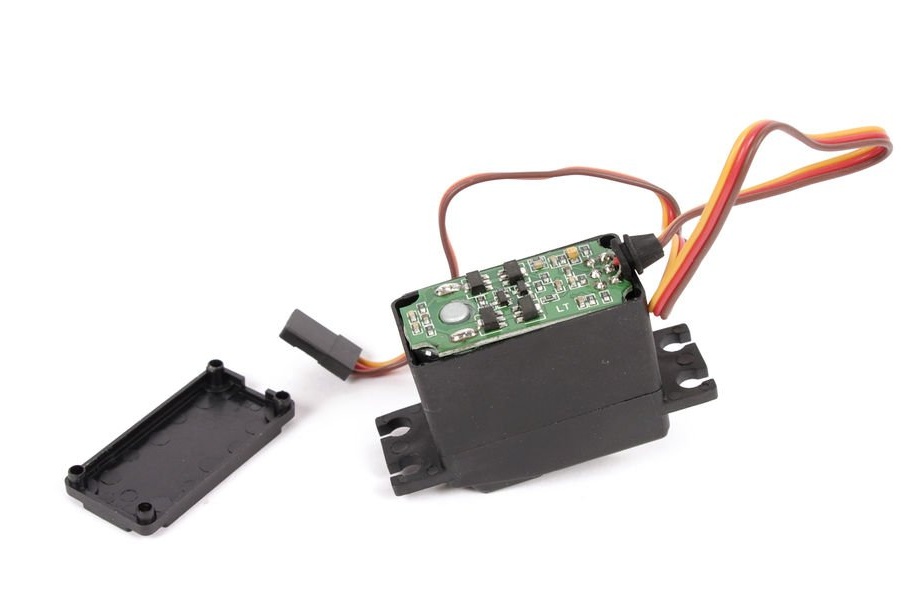
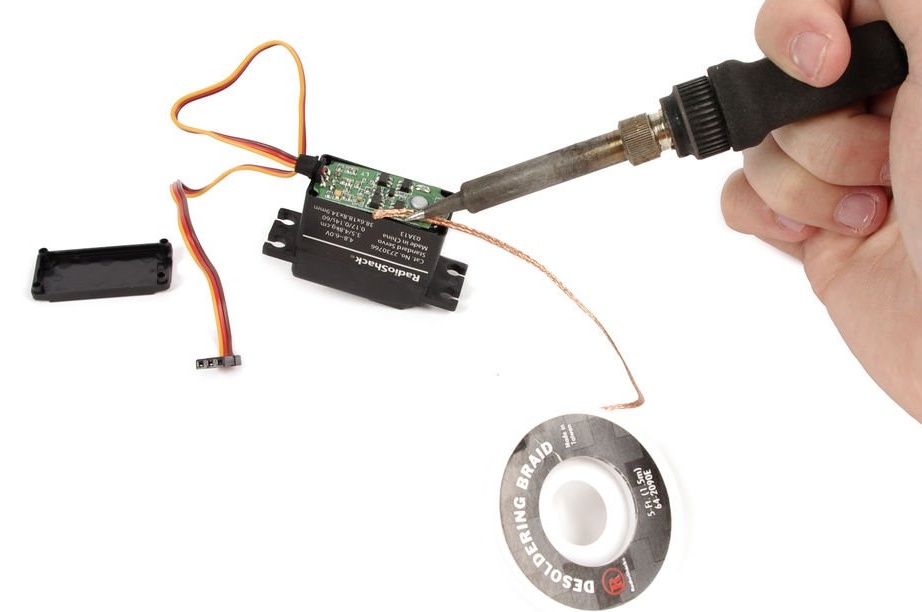
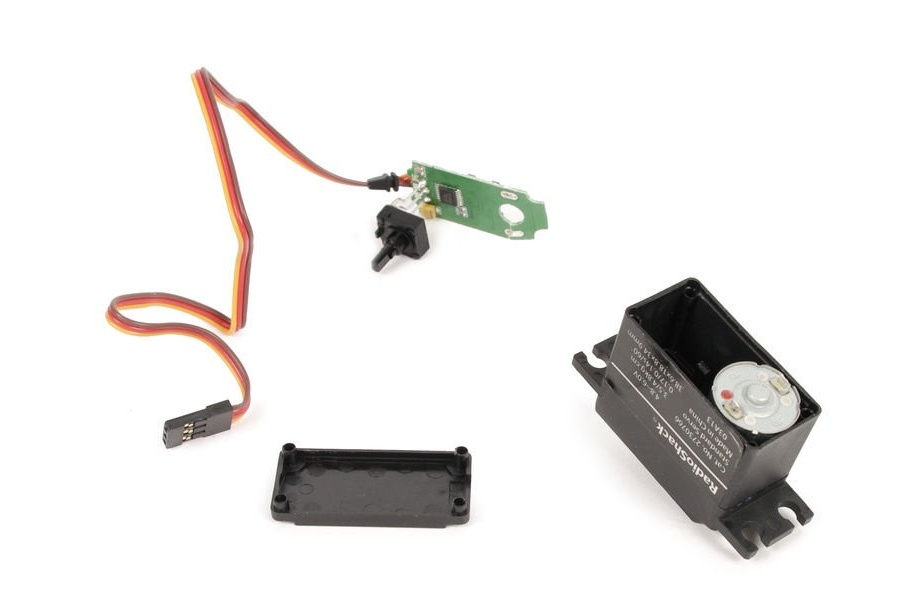




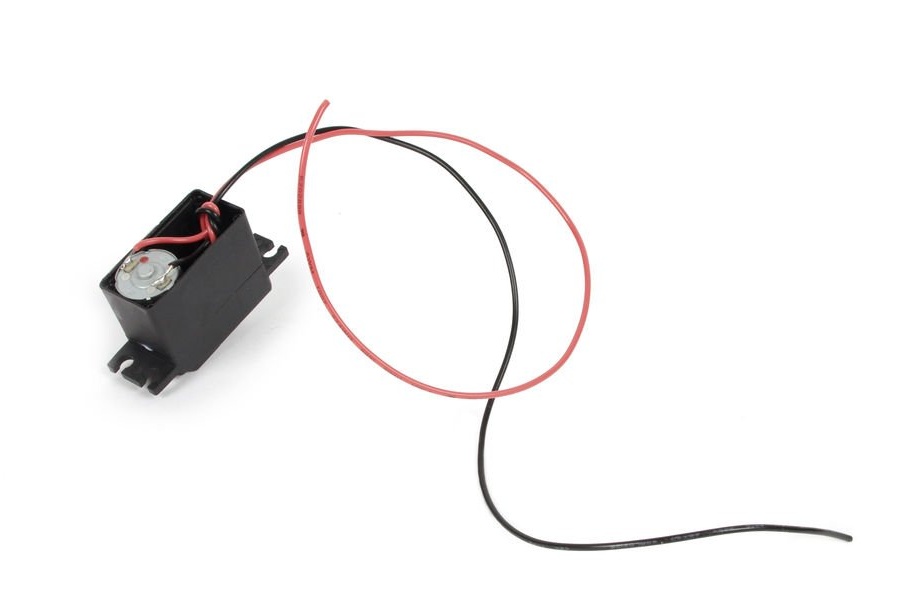
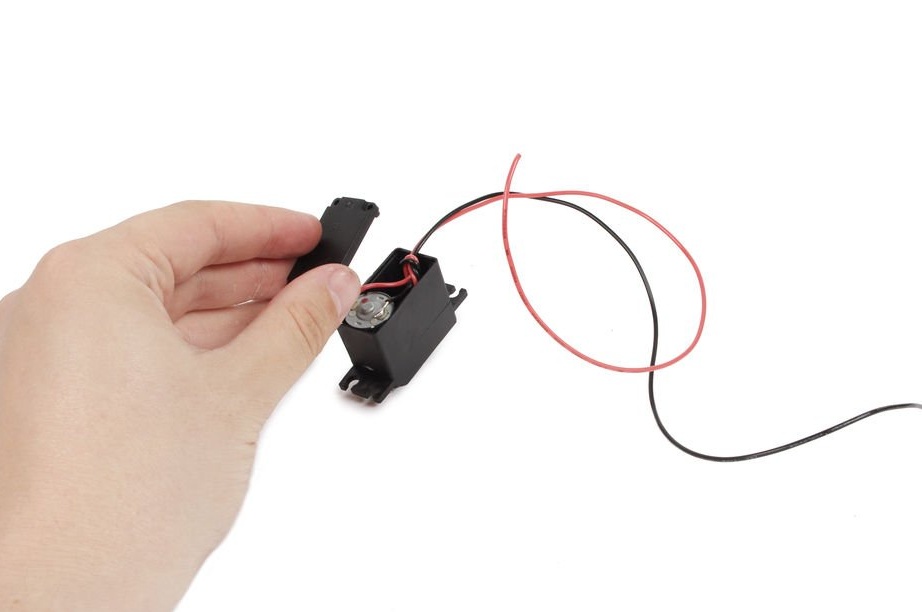

Open het servohuis door 4 schroeven op het onderste paneel los te draaien. Rits de kaart aan de binnenkant open en sluit de rode en zwarte bedrading aan op elke aansluiting van de schijf.
Open de tandwielaandrijving en vind het tandwiel met een kleine plastic dop die continue rotatie voorkomt. Snijd de dop van de versnelling af.
Stap 3: Boor
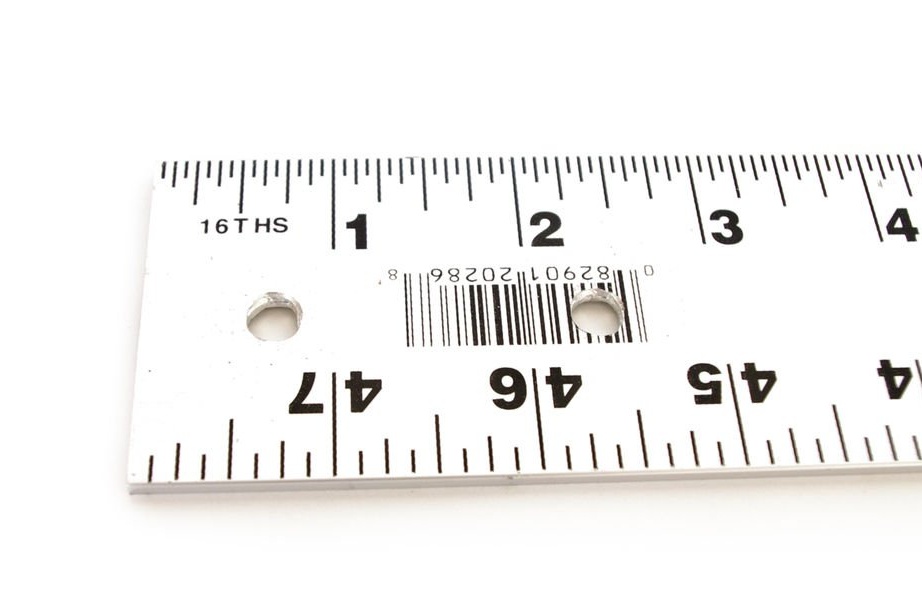


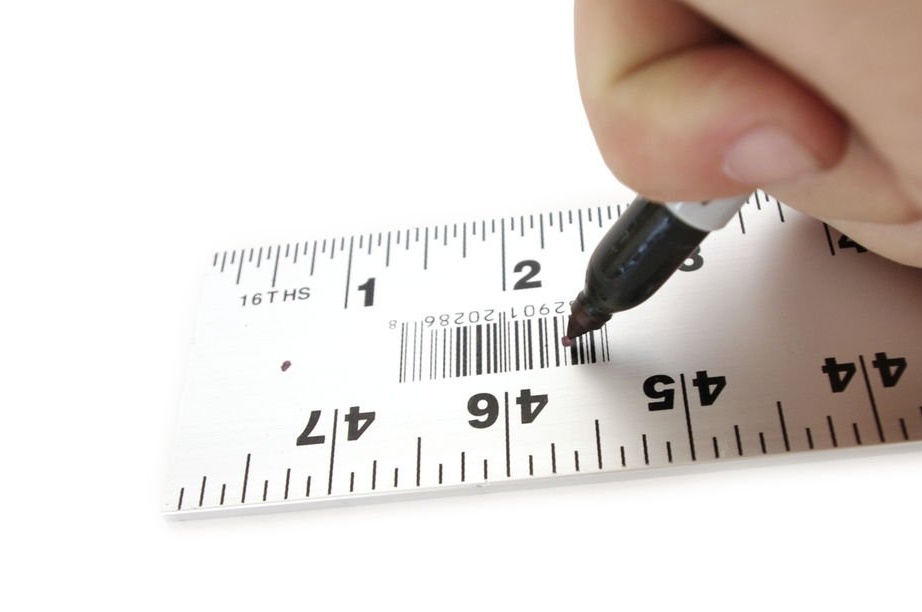
Boor een gat van 6,3 mm in het midden van de liniaal, ongeveer 15 mm vanaf de korte rand. Boor een tweede gat op ongeveer 60 mm van dezelfde rand.
Stap 4: Buig

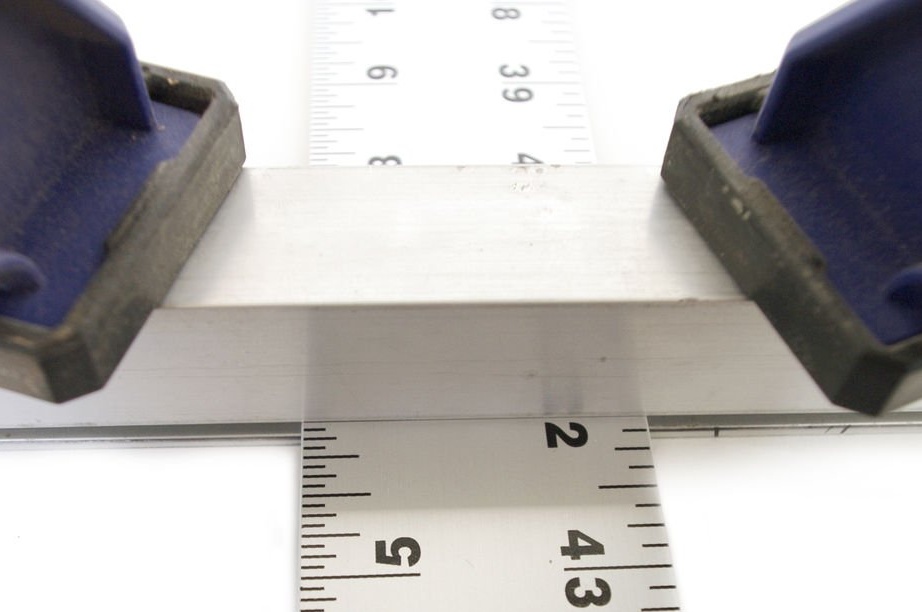
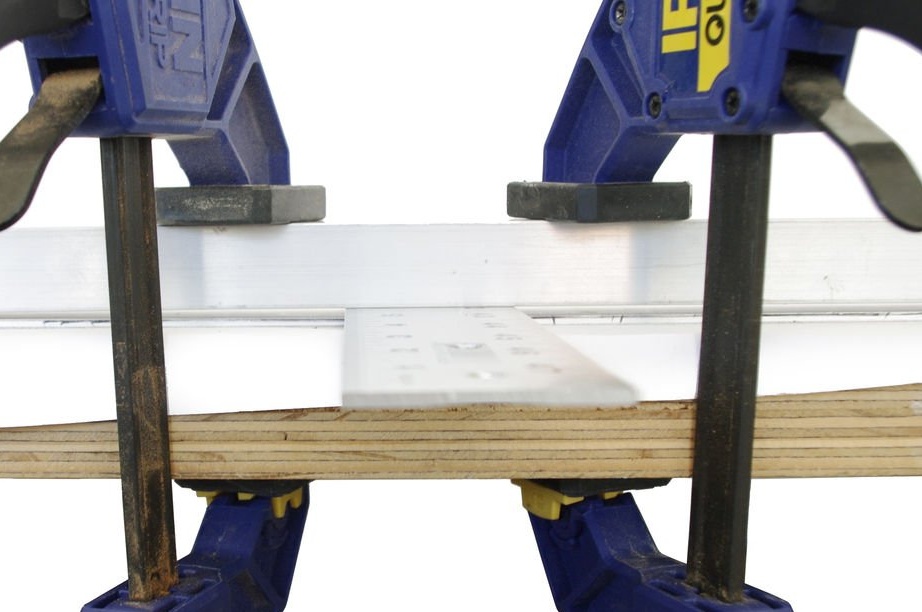

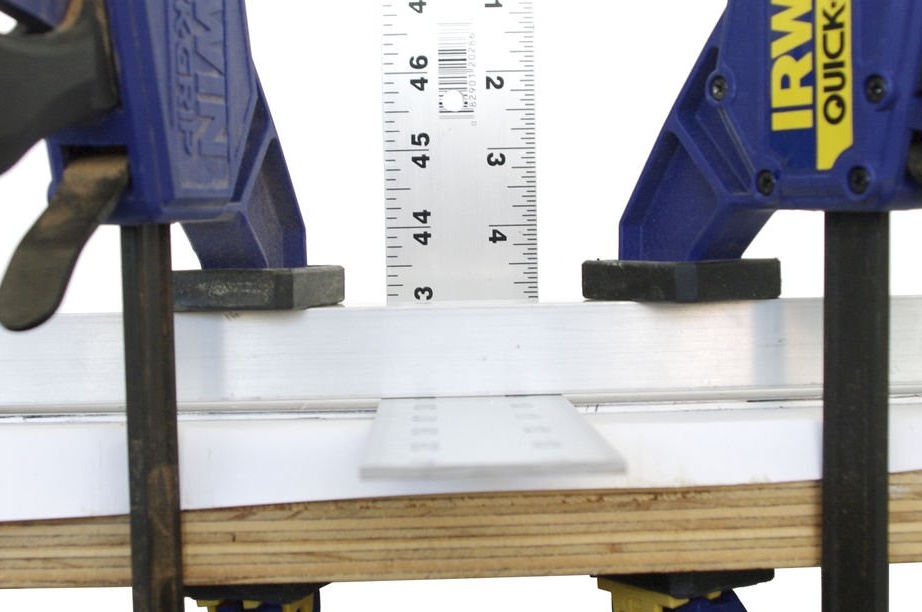

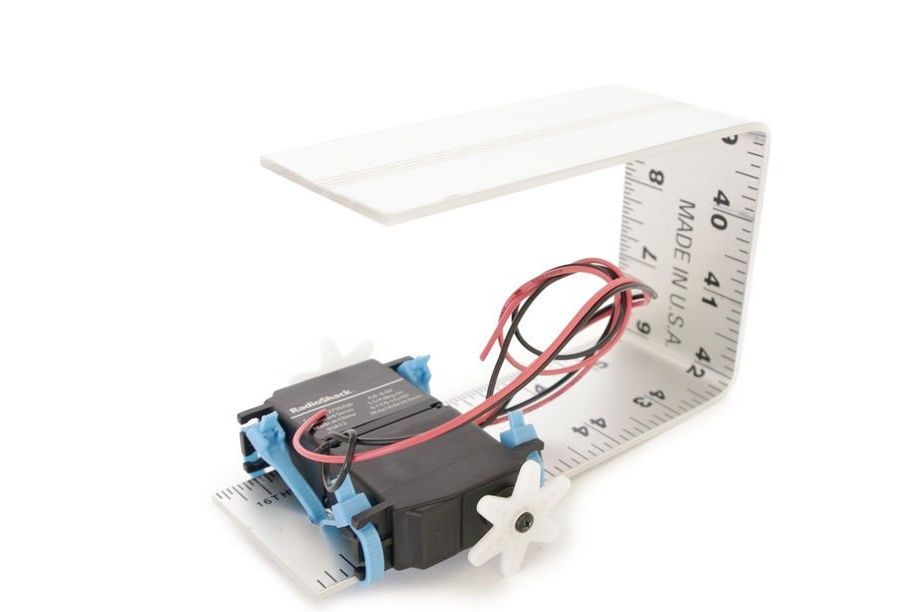
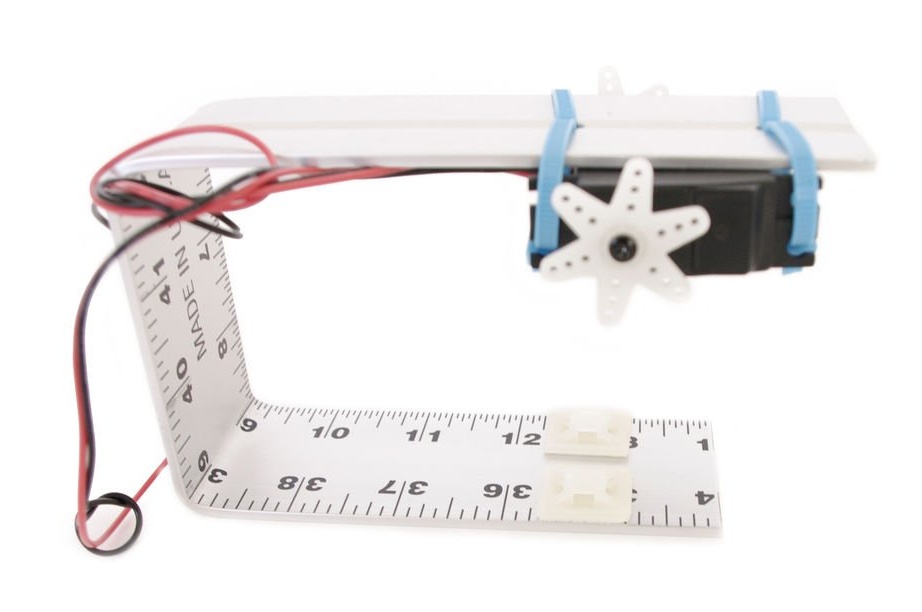
Buig de liniaal met behulp van een bankschroef of twee metalen platen die op de rand van de tafel zijn geklemd onder een hoek van 90 graden op een afstand van 15 cm van de rand waarin de gaten zijn geboord.
Maak dezelfde bocht onder een hoek van 90 graden op een afstand van 15 cm van de andere rand. Je krijgt een figuur in de vorm van de letter P.
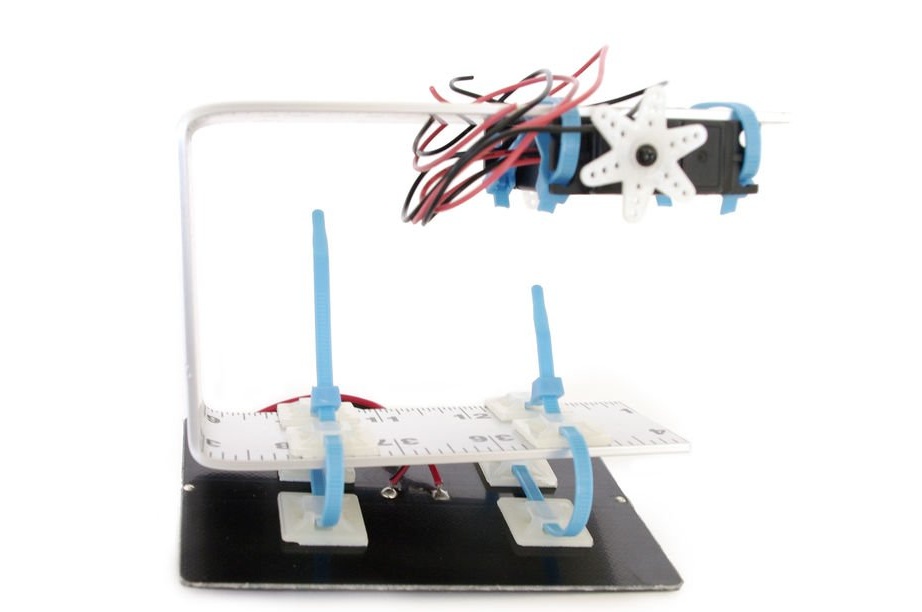
Stap 5: Verbinding

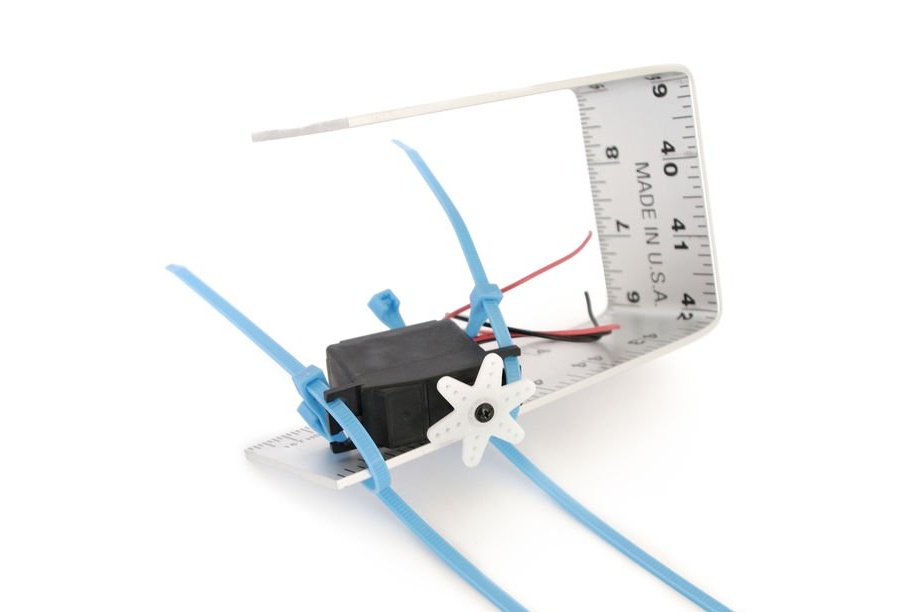
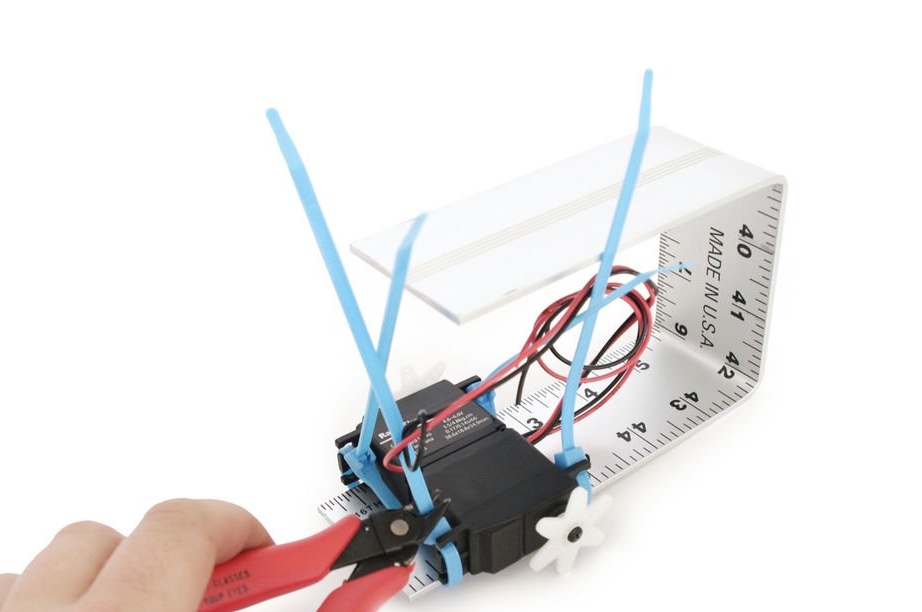
Het is noodzakelijk om de servo's op de lijn te bevestigen met plastic klemmen, door geboorde gaten. Servomotoren moeten met de rug naar elkaar zitten.
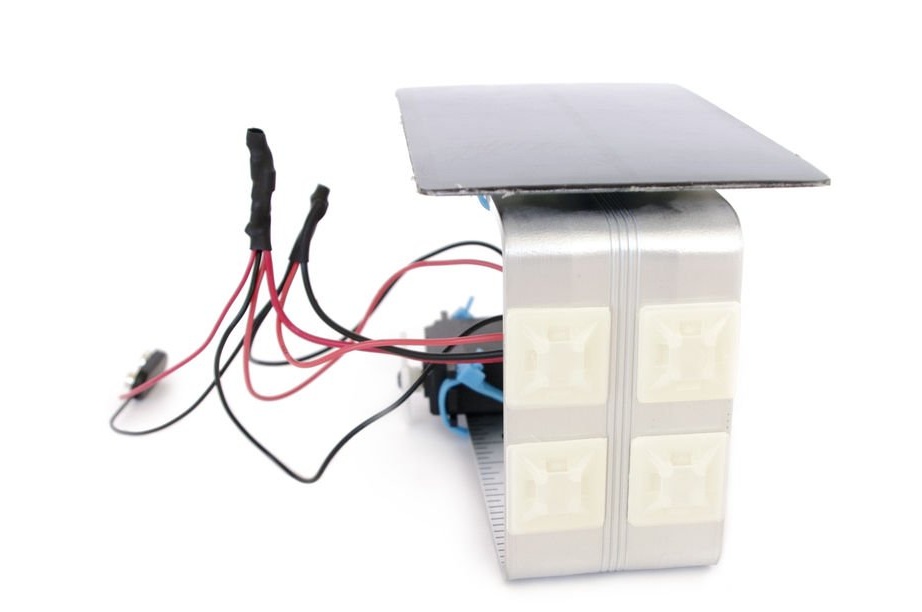
Stap 6: Basis voor klemmen
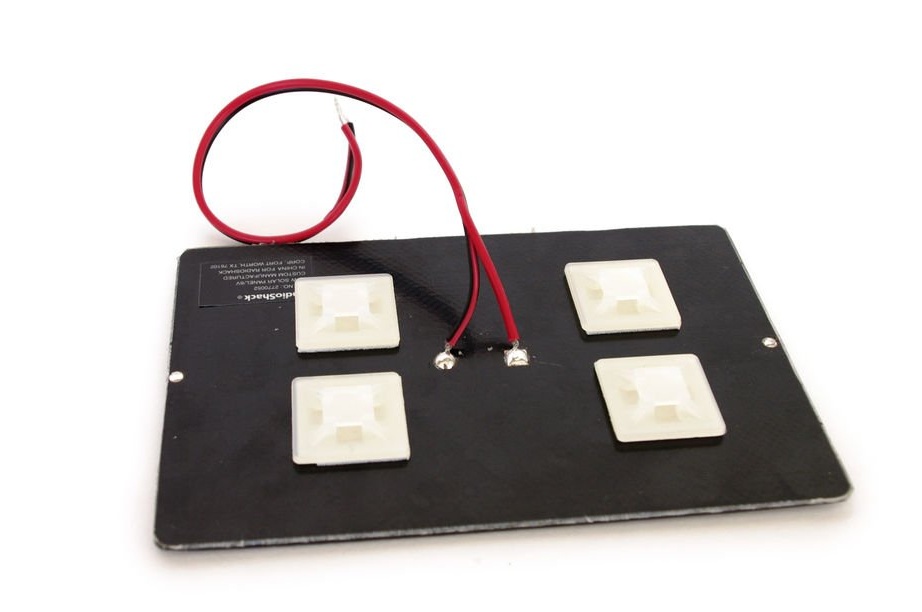

Plaats twee paar klemvoeten naast elkaar op de achterkant van het zonnepaneel. Het is belangrijk dat de kanalen van elk paar op dezelfde lijn staan.
Stap 7: meer redenen
Bevestig nog twee bases aan de binnenkant van de U-balk, aan de kant tegenover de servo's.
Stap 8: Verbinding
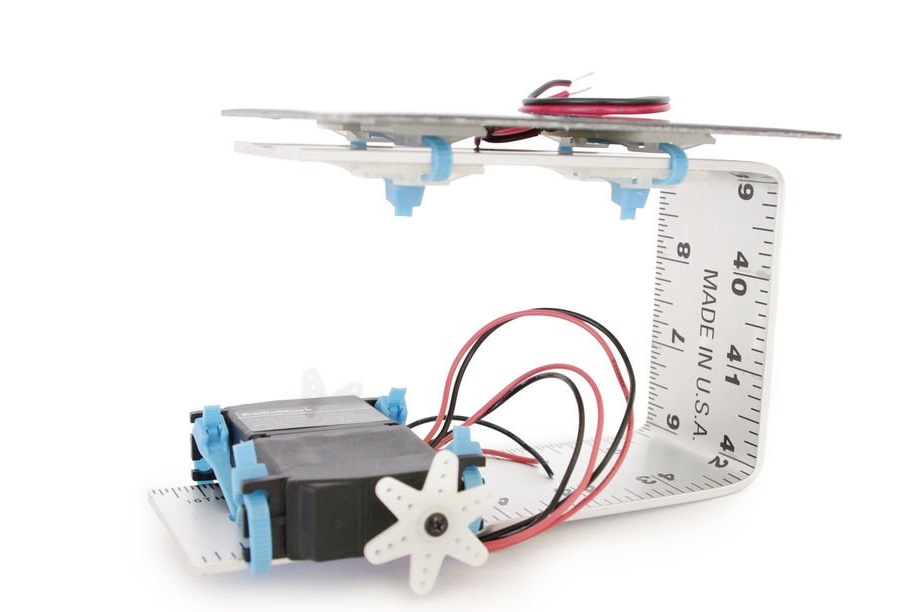
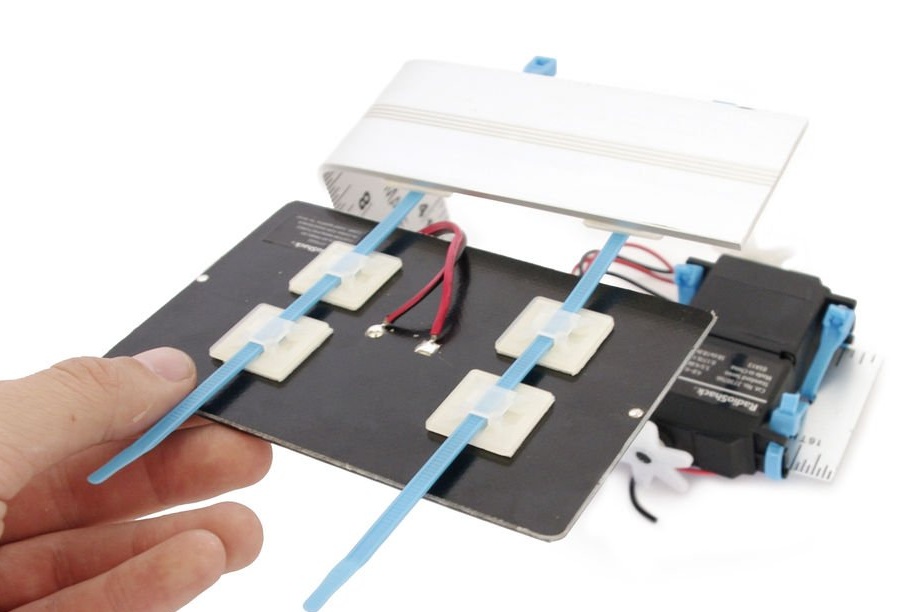
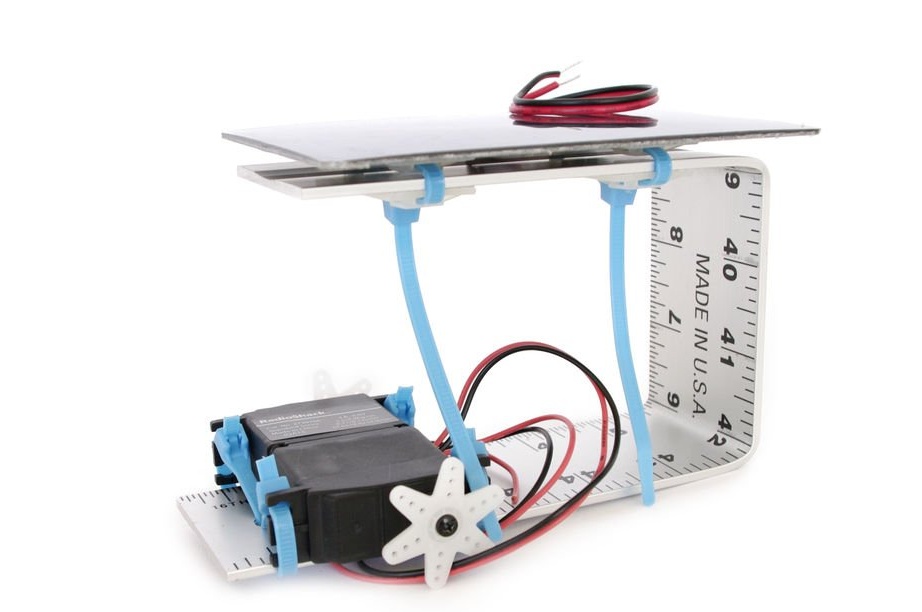
Bevestig het zonnepaneel met klemmen door middel van vaste sokkels.
Stap 9: Plaats de batterijen


Plaats de batterijen in de batterij.
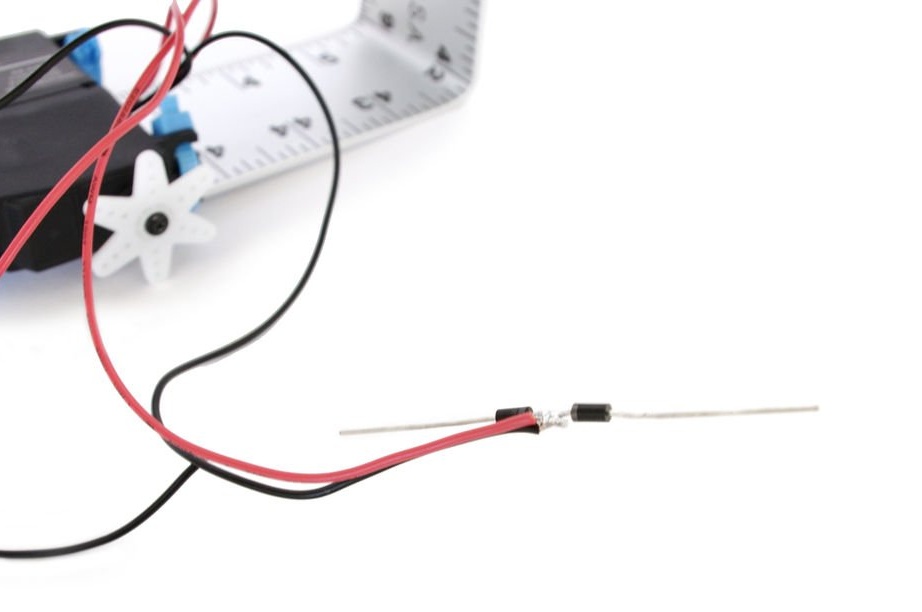
Stap 10: Diodes

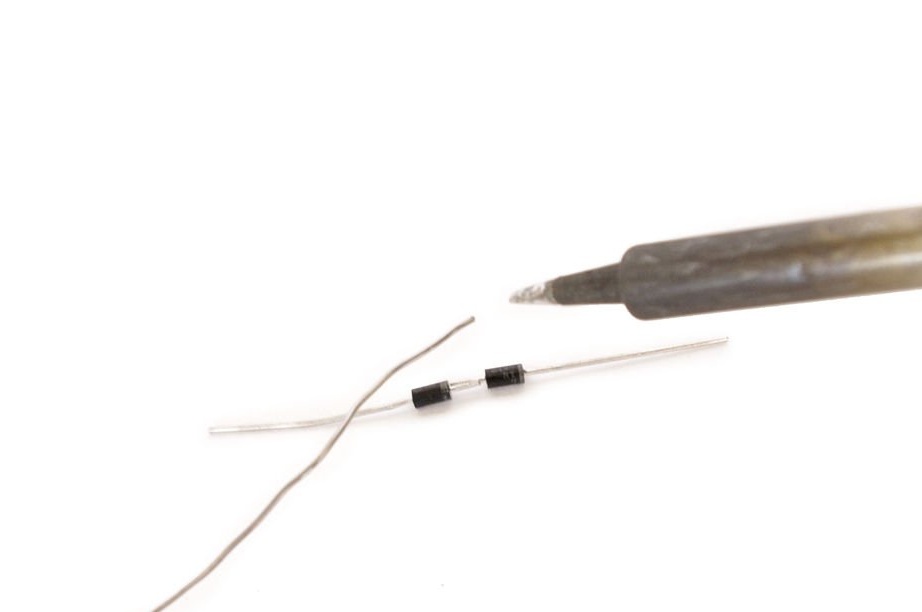
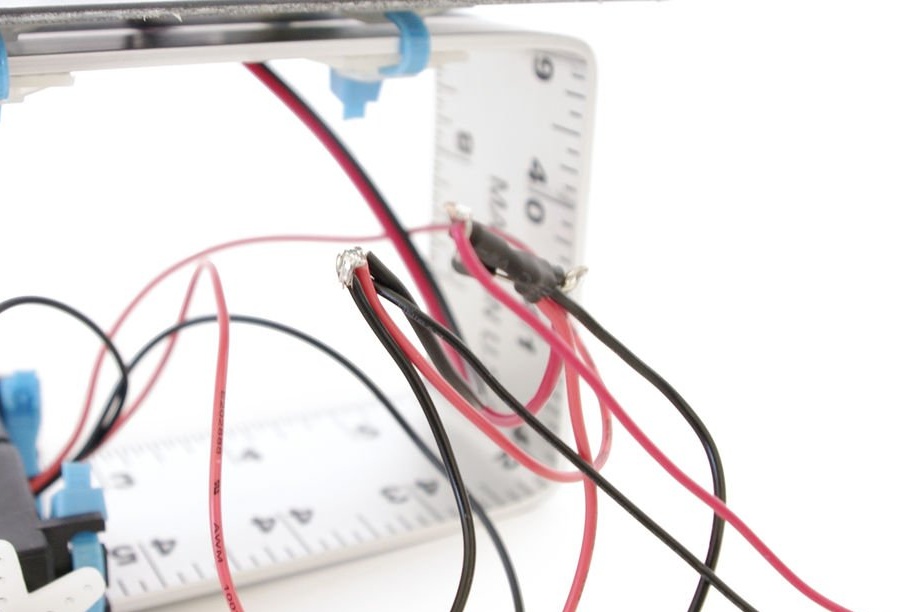
Soldeer de twee diodes samen met de kathodes (kant van de diodes met het spoor).
Stap 11: Chain Assembly
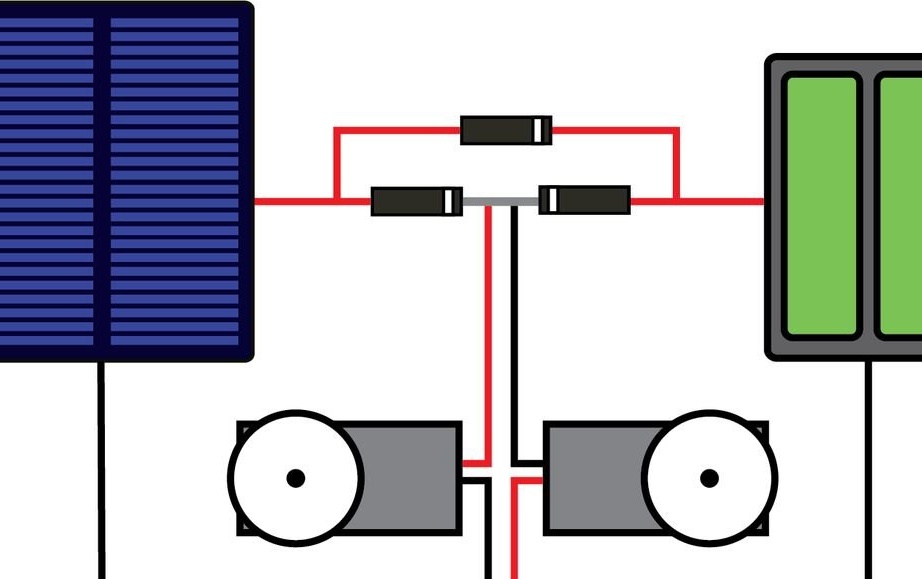
Het circuit voor deze robot is gebaseerd op het eenvoudige zonnelaadcircuit van David Cook. Het circuit bevat twee Schottky-diodes die zijn aangesloten op de kathode-naar-kathode, een diode die is aangesloten op het zonnepaneel en een van de batterijen. Met deze configuratie kunt u worden gevoed door zowel batterijen als het zonnepaneel, afhankelijk van de omstandigheden.
Omdat de batterijen oplaadbaar zijn, wordt een derde Schottky-diode rechtstreeks vanaf het zonnepaneel op het batterijvak aangesloten om de batterijen op te laden vanuit de zon.
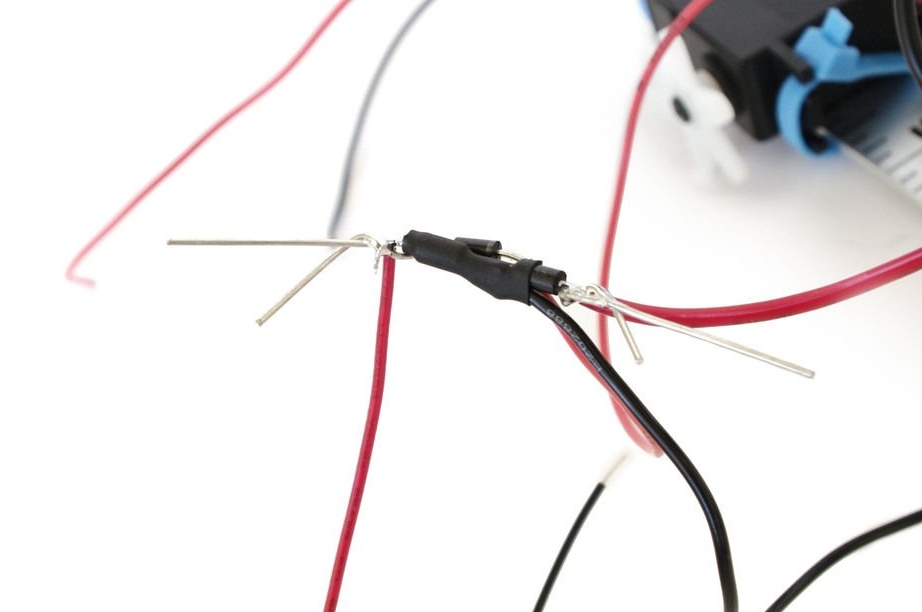
Om alles te verbinden, sluit u de rode draad van een van de servo's en de zwarte draad van de andere aan op het middelpunt van de kathodeverbinding.
Verbind vervolgens de rode draad van de accupool met de anode van een van de Schottky-diodes. Verbind de rode draad van het zonnepaneel met de anode op een andere diode.
Soldeer nu de anode van de derde diode aan de rode draad die is aangesloten op het zonnepaneel en de kathode aan de rode draad vanaf de accupool.
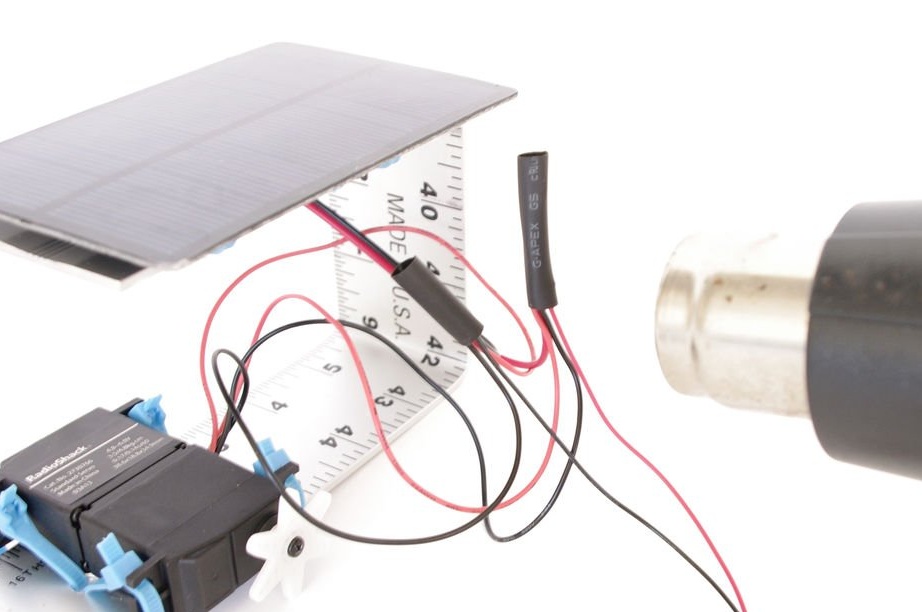
Wikkel alle draden met krimpkous om het circuit te beschermen tegen kortsluiting.
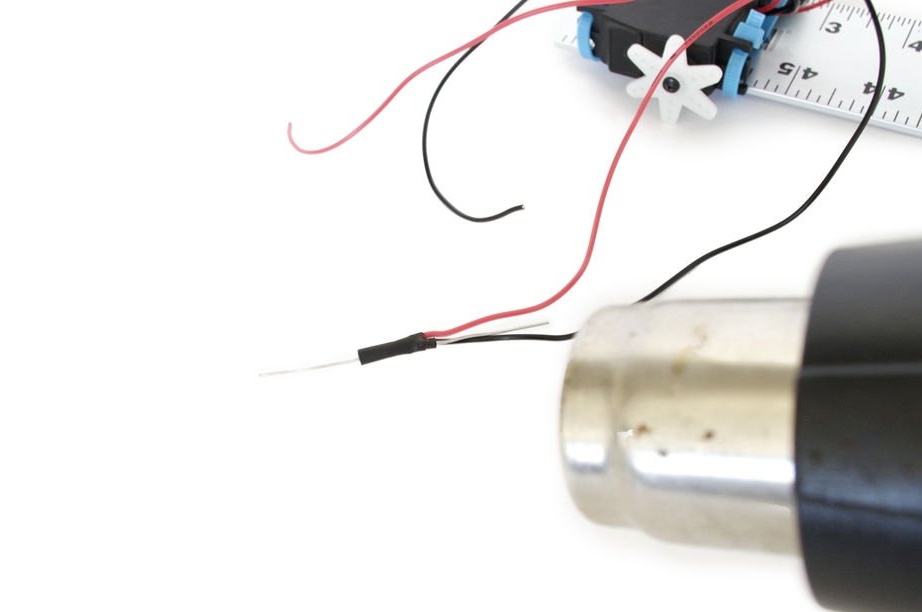
Stap 12: nog enkele draden
Soldeer alle zwarte draden en de resterende vrije rode draden van de servo's aan elkaar.
Krijg twee soldeerverbindingen; één voor stroom en één voor aarding. Wikkel beide gewrichten in met krimpkous of elektrische tape.
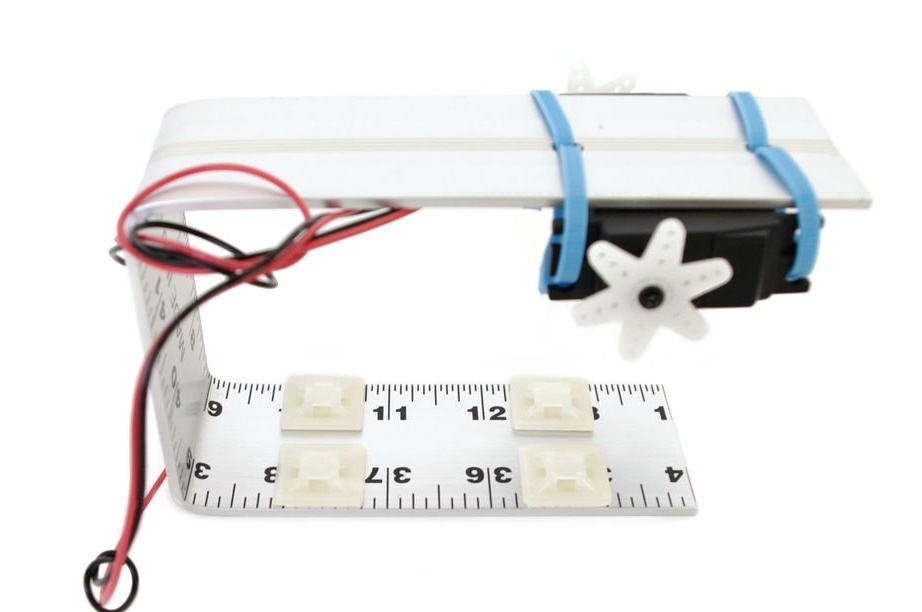
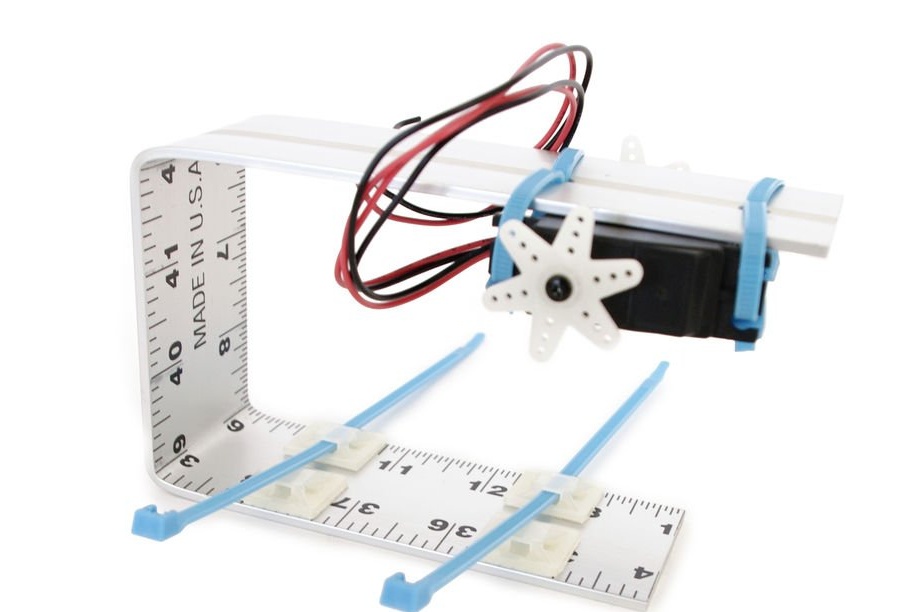
Stap 13: En nog enkele redenen voor de klemmen
Bevestig twee paar voetstukken aan de onderkant van de U-vormige gebogen liniaal.
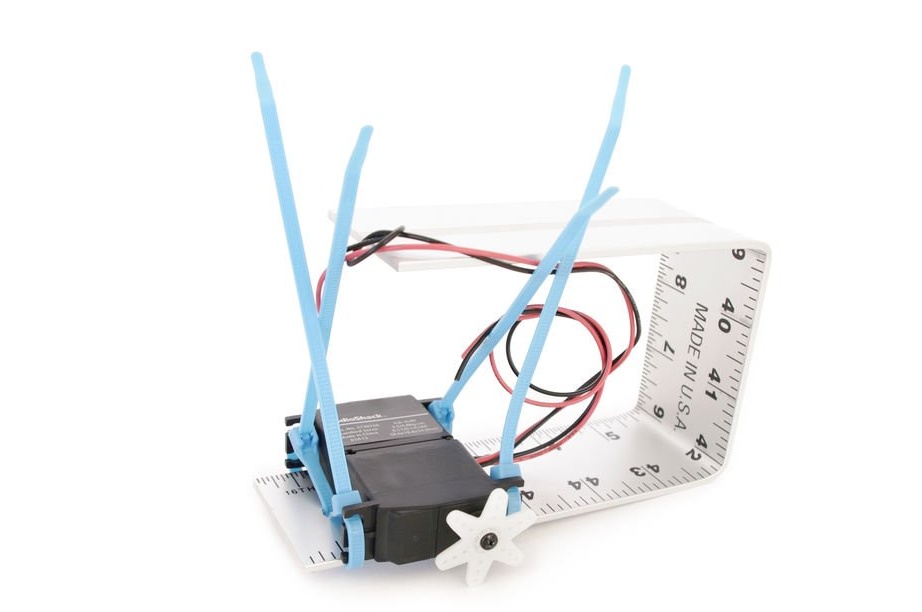
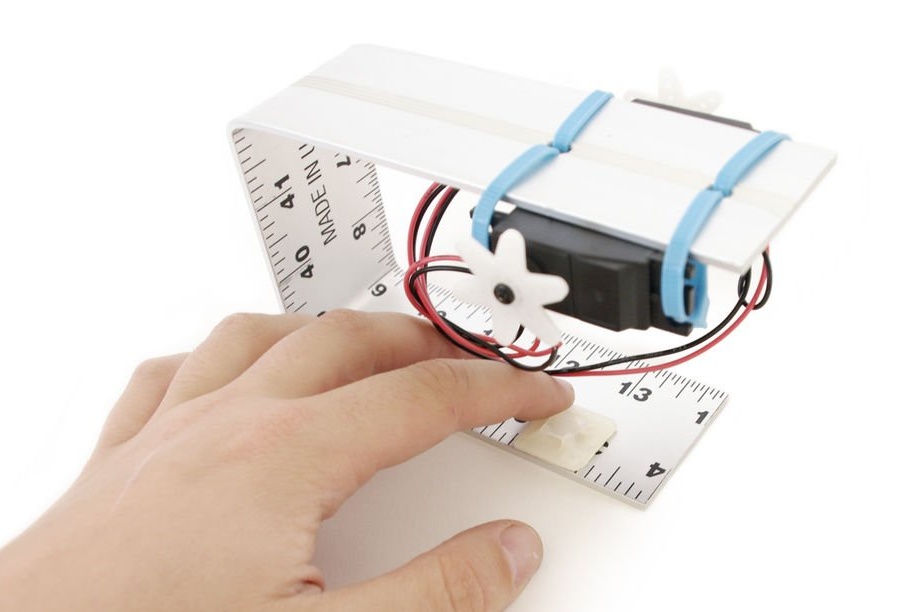
Stap 14: De batterijen beveiligen
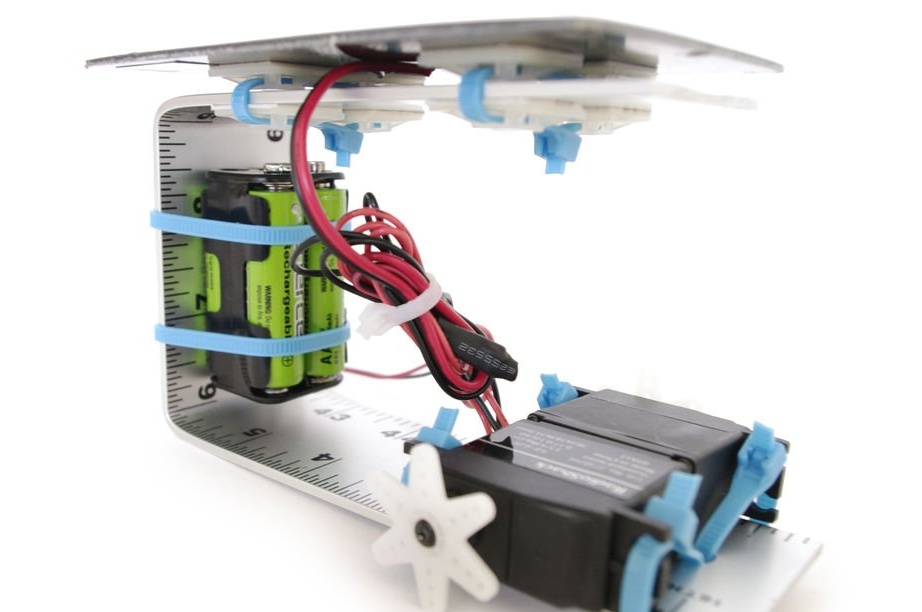
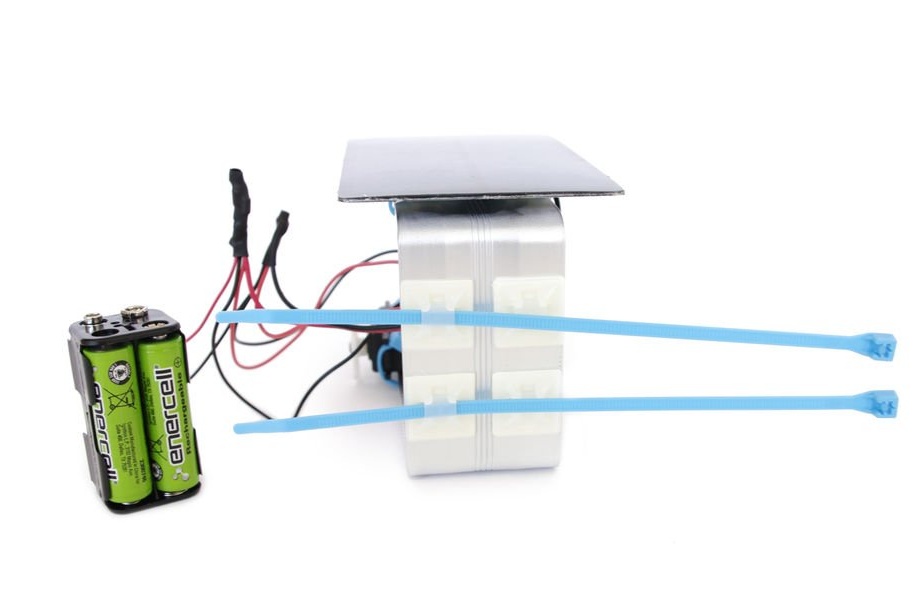
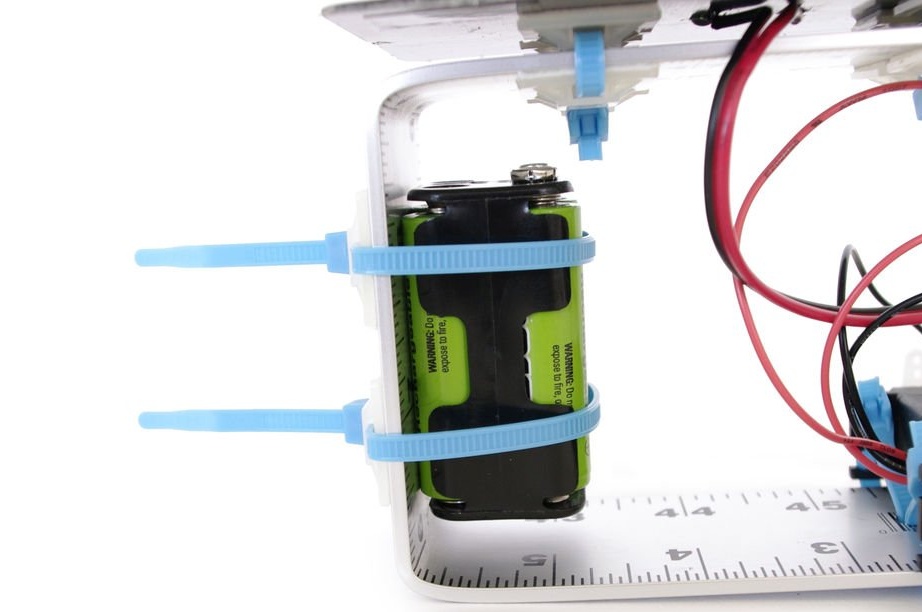
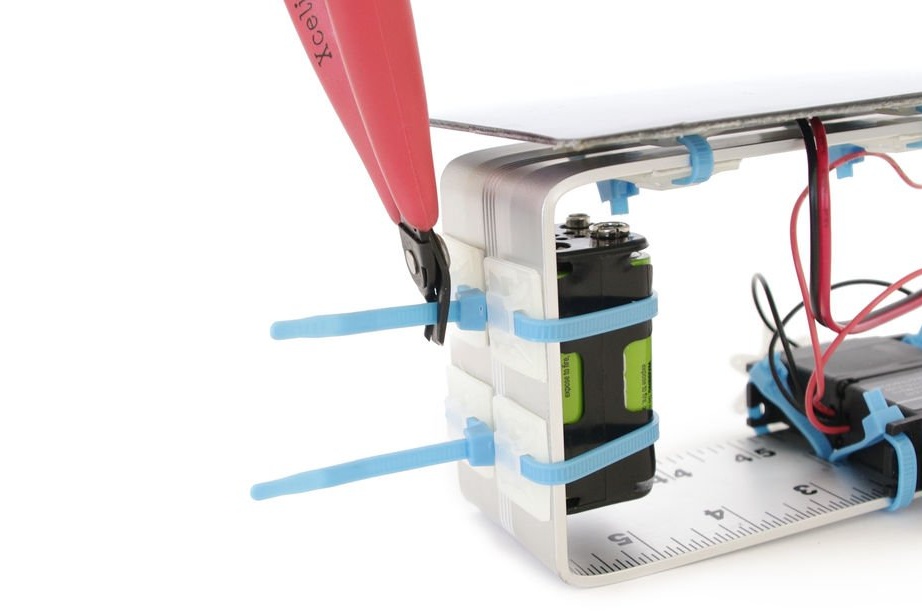
Bevestig de batterijen met klemmen in de U-vormige liniaal, zodat ze stevig en onbeweeglijk op hun plaats zitten.
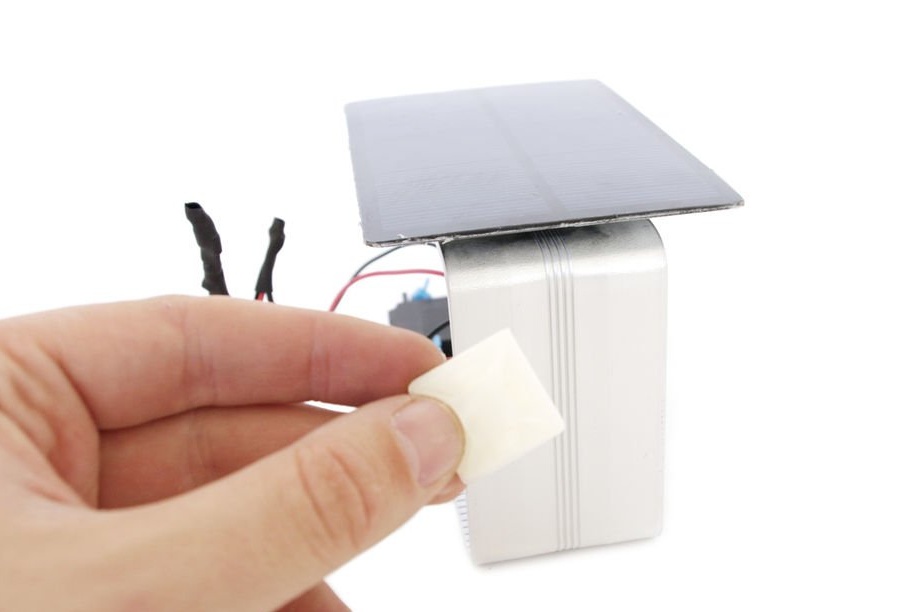
Stap 15: Trimmen


Snijd de haken op de plastic muurbeugels.
Stap 16: Wielen
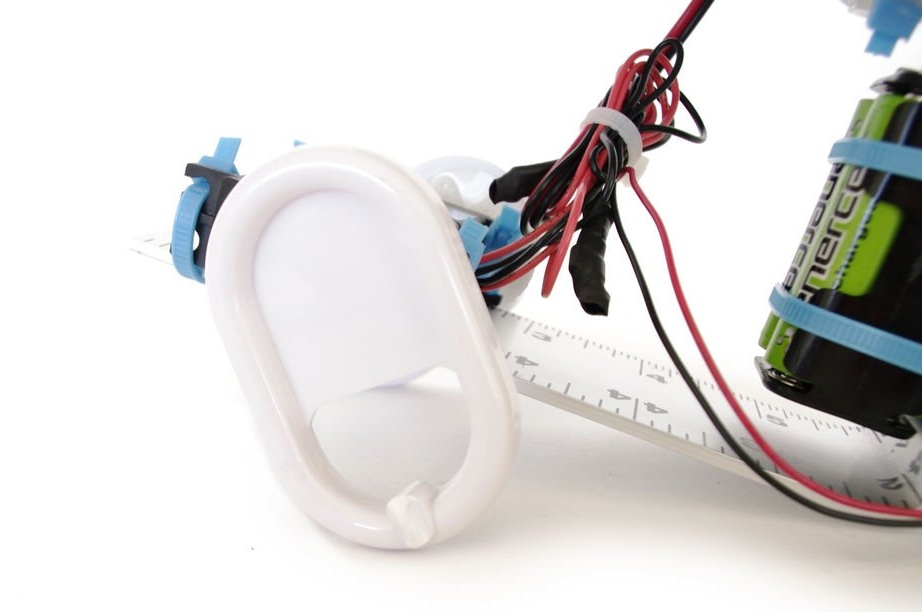
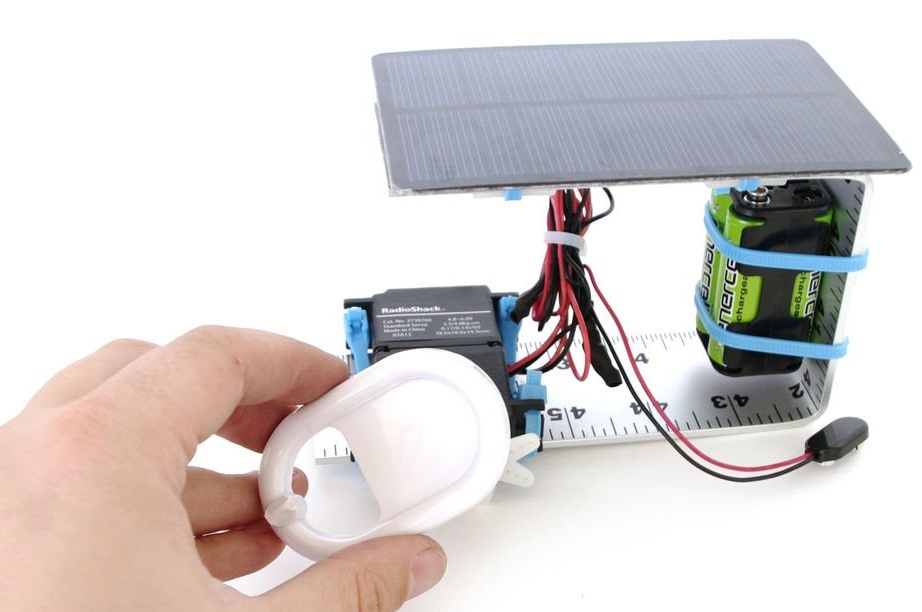
Lijm de muursteunen aan de buitenste tandwielen van de servo's (dit zullen zoiets zijn als wielen).
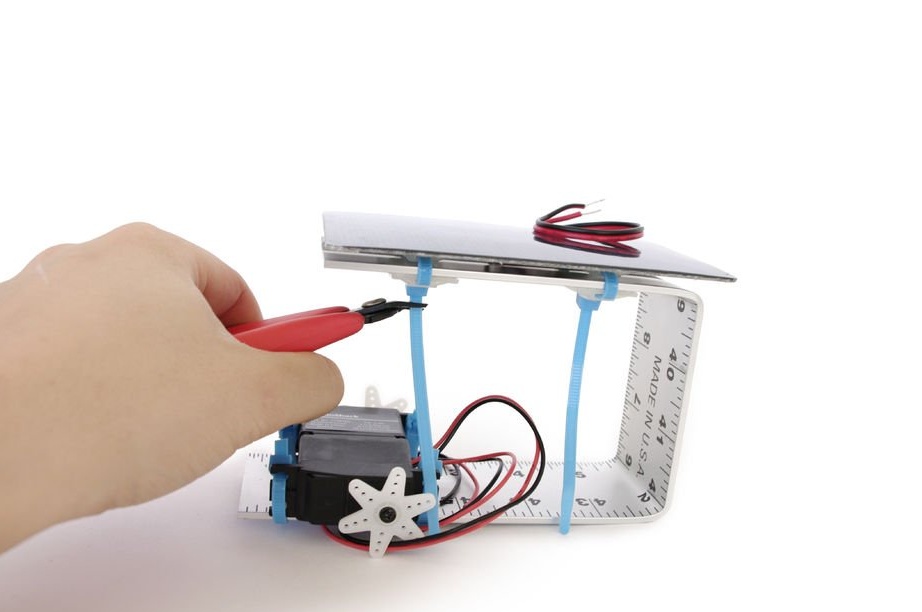
Stap 17: Zet aan!

Sluit de kabel aan op de accu en de robot begint te bewegen.