
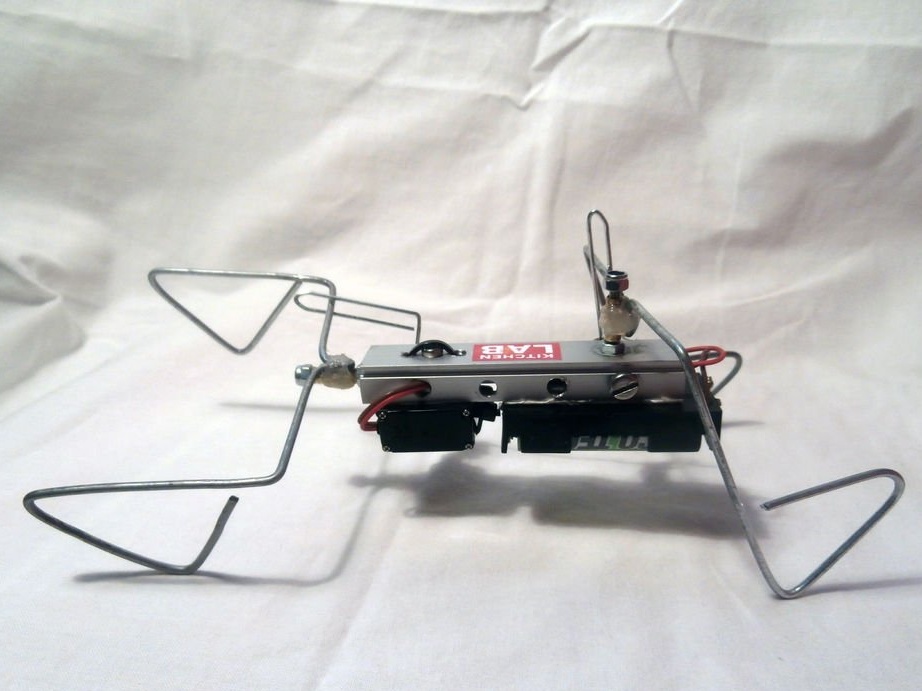
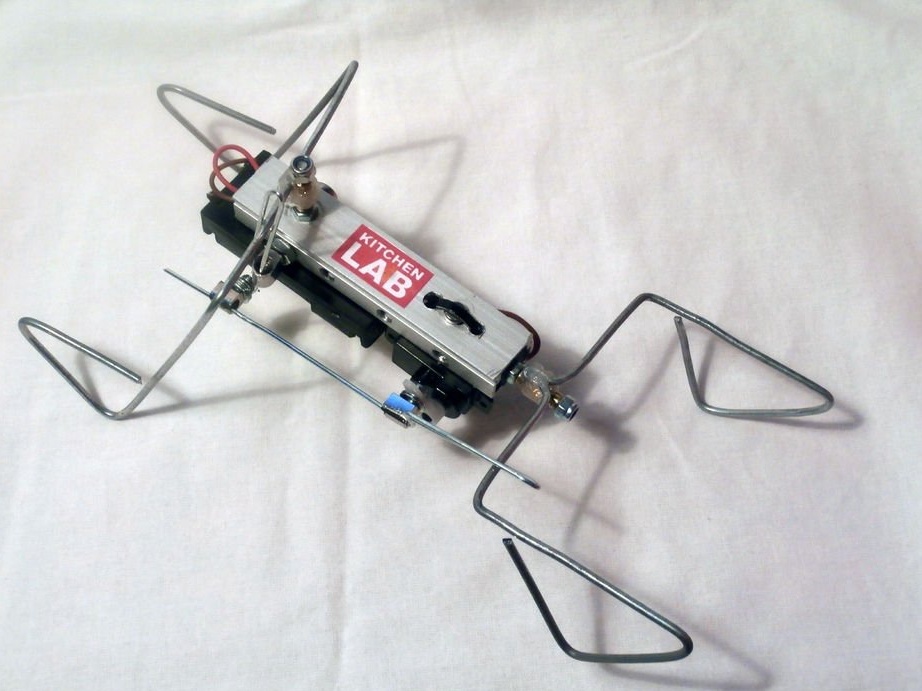
Hallo allemaal! Ik werd geïnspireerd om mijn BEAM-robot te maken, nadat ik genoeg van deze eenmotorige en tweemotorige wonderen van robotica op internet had gezien. Het idee was om een looprobot te maken, op dezelfde manier als BEAM-rollers met 1 of 2 motoren. Na verschillende mislukte experimenten deed ik wat ik wilde!
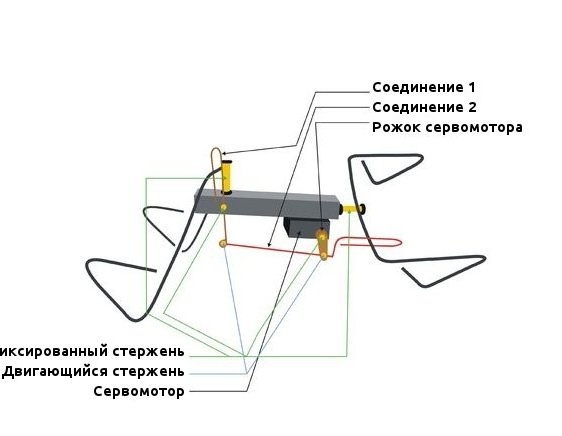
Stap 1: het mechanisme
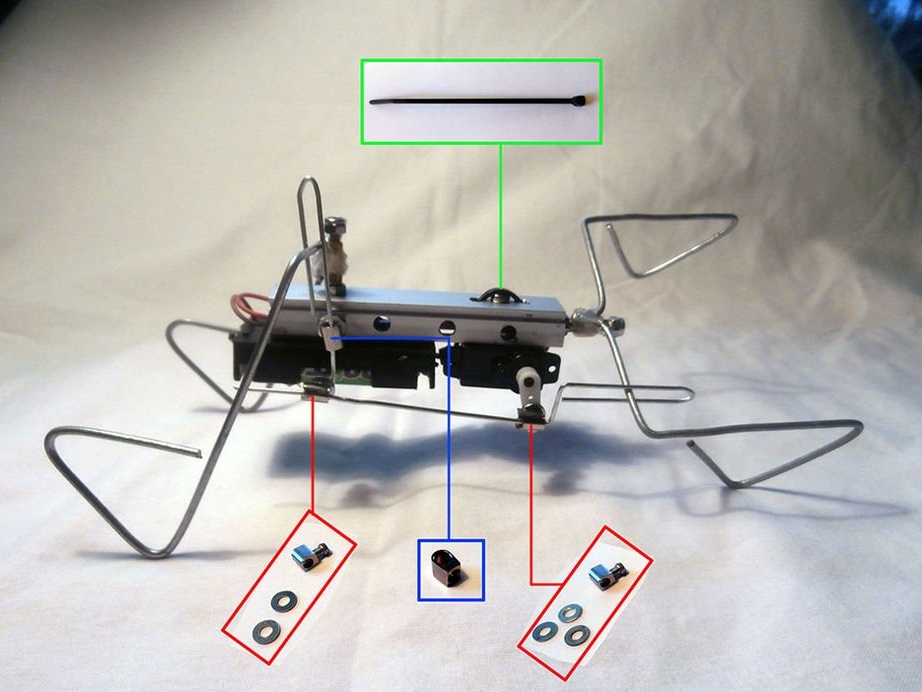
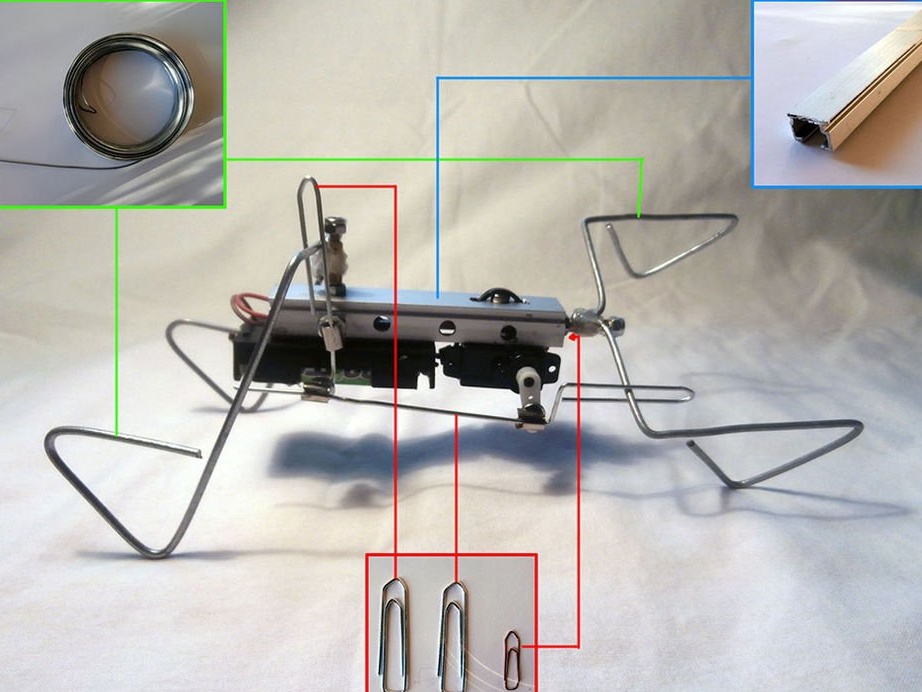
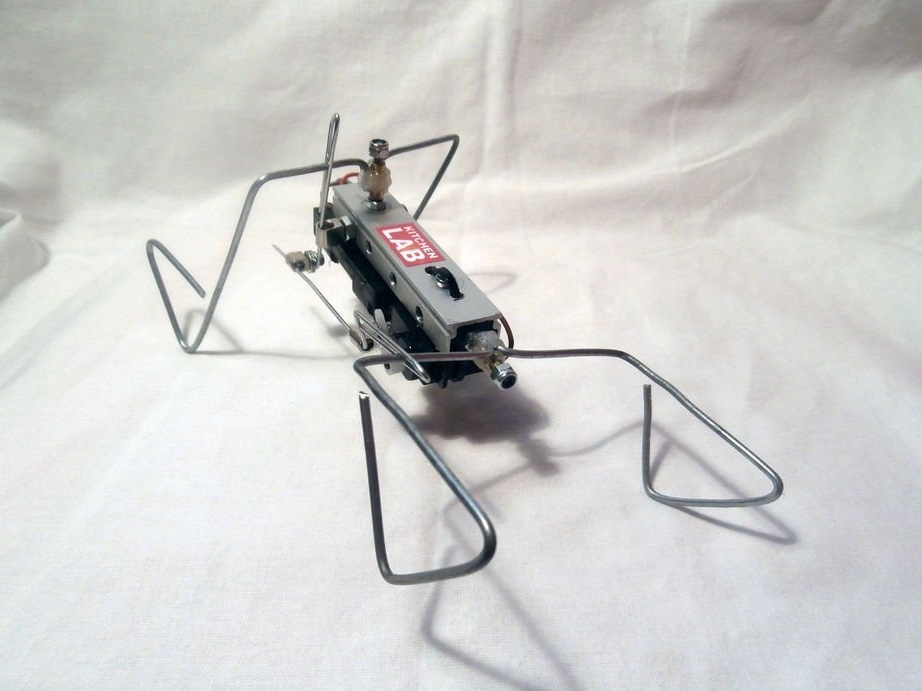
Stap 2: vereiste onderdelen

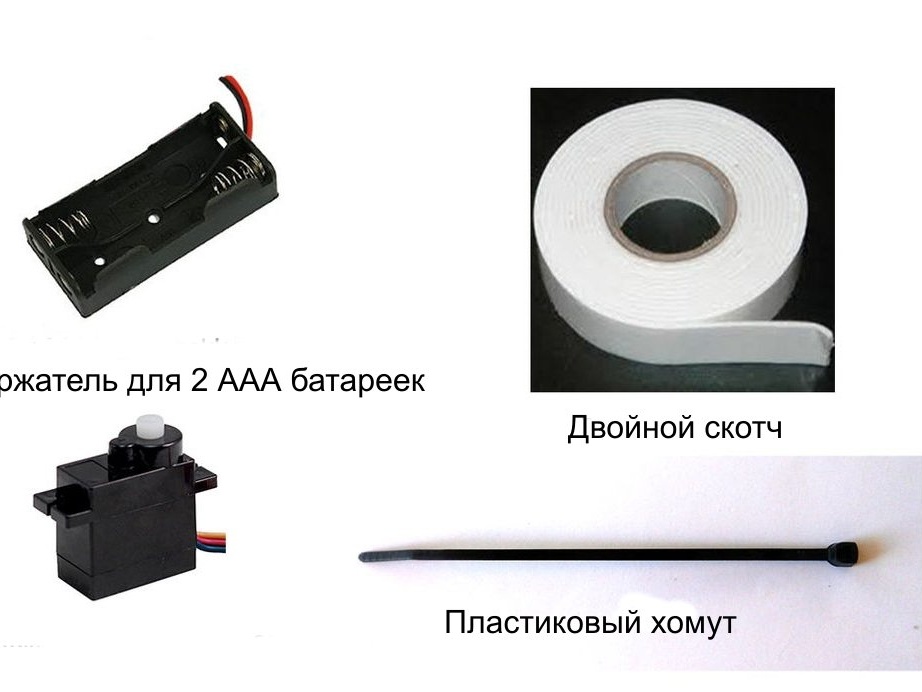



(1x) continu roterende servo
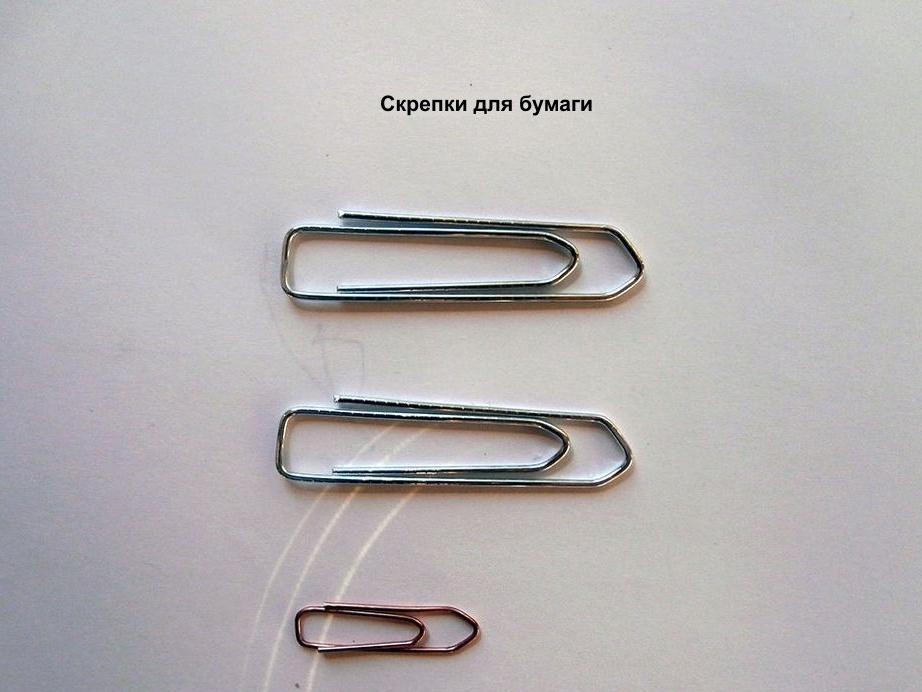
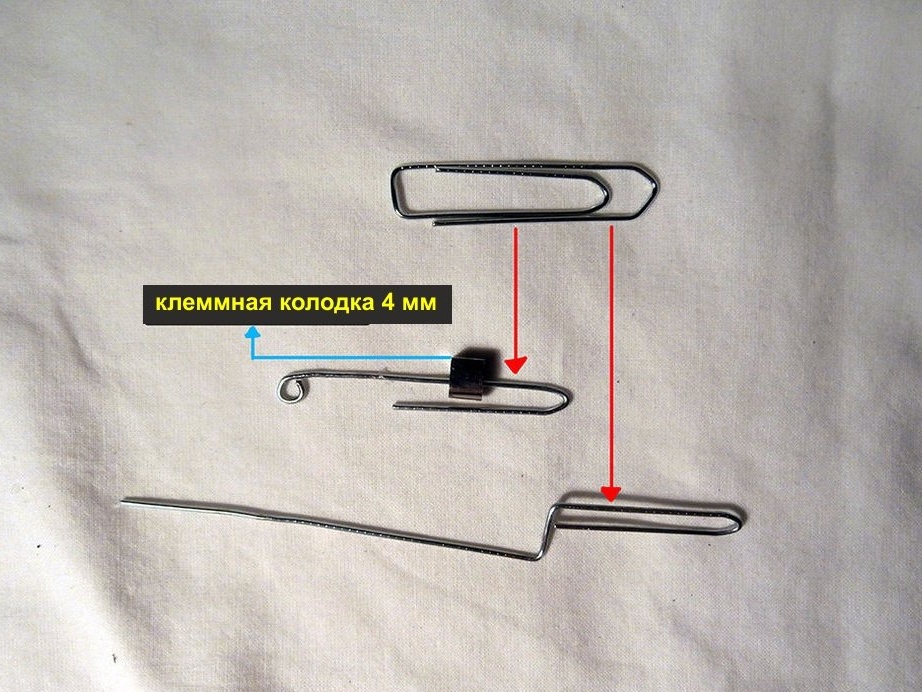
(2x) grote paperclips
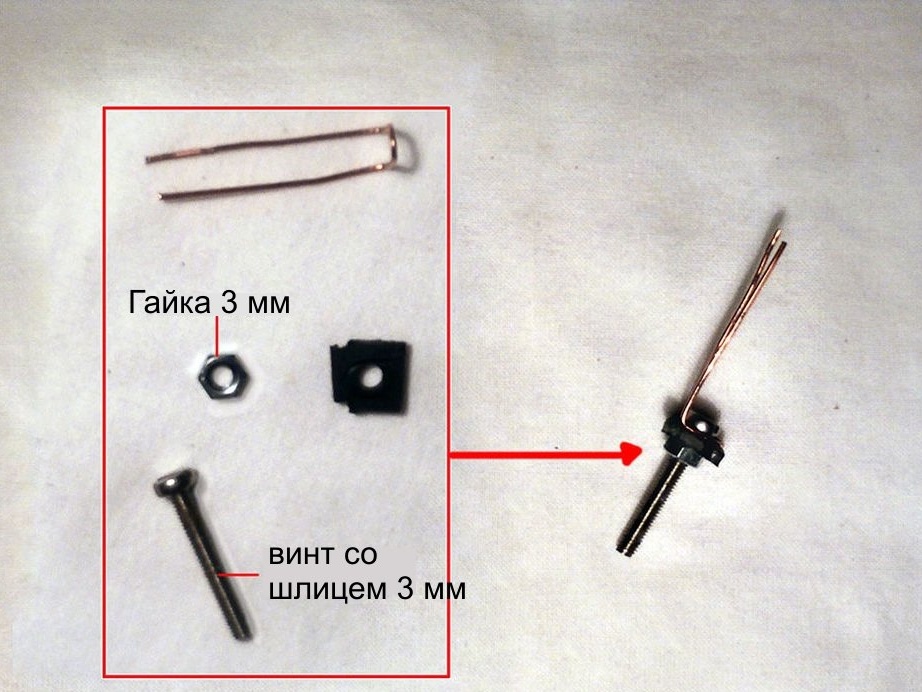
(1x) kleine paperclip
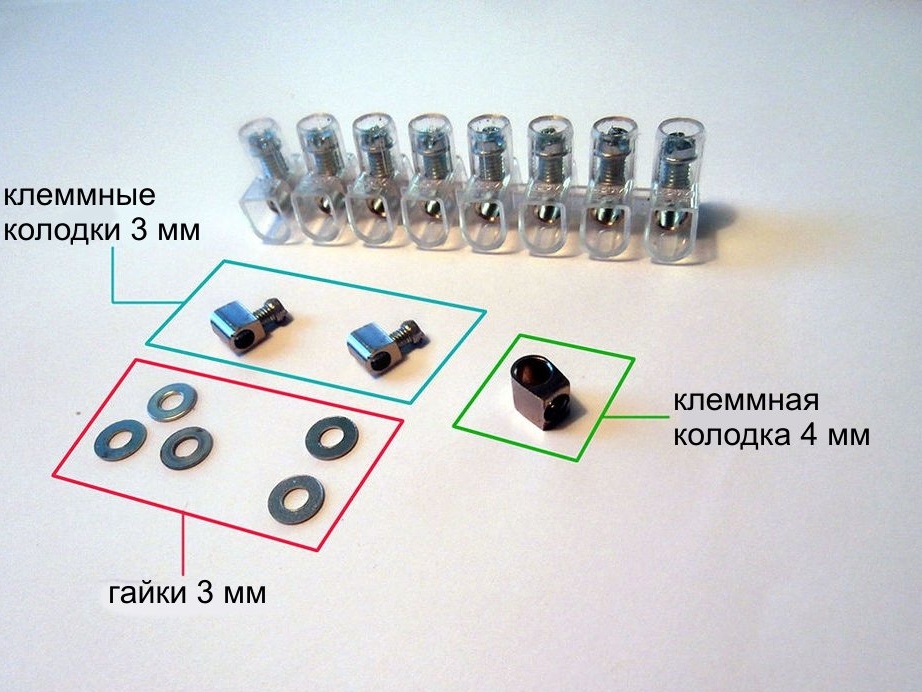
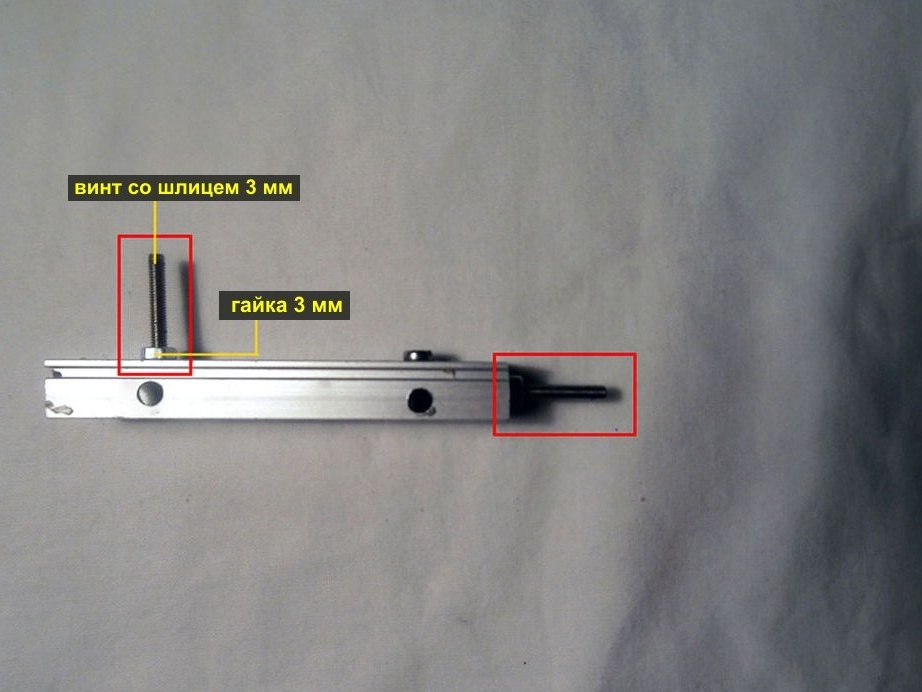
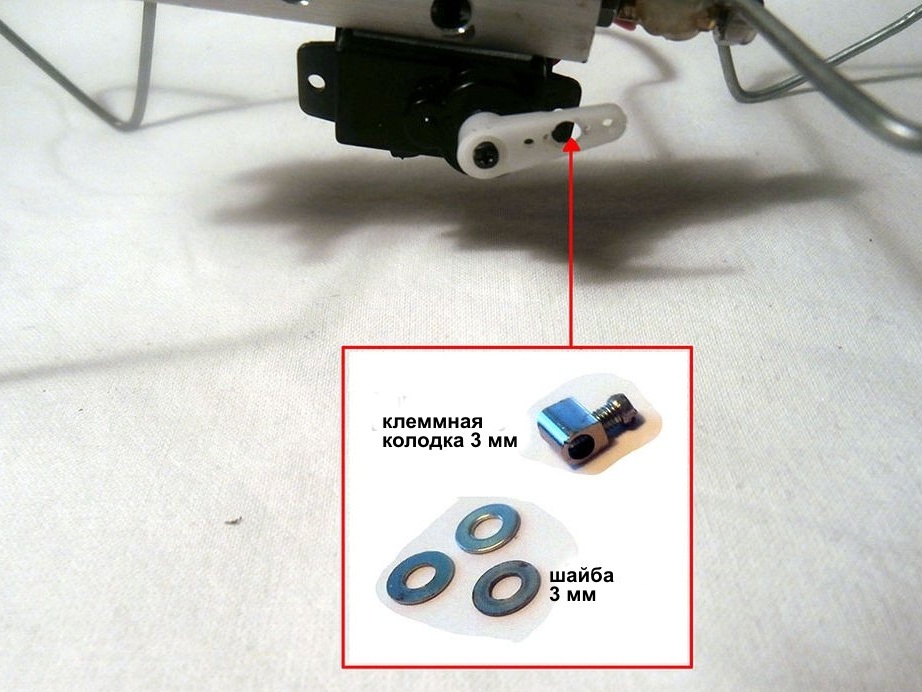
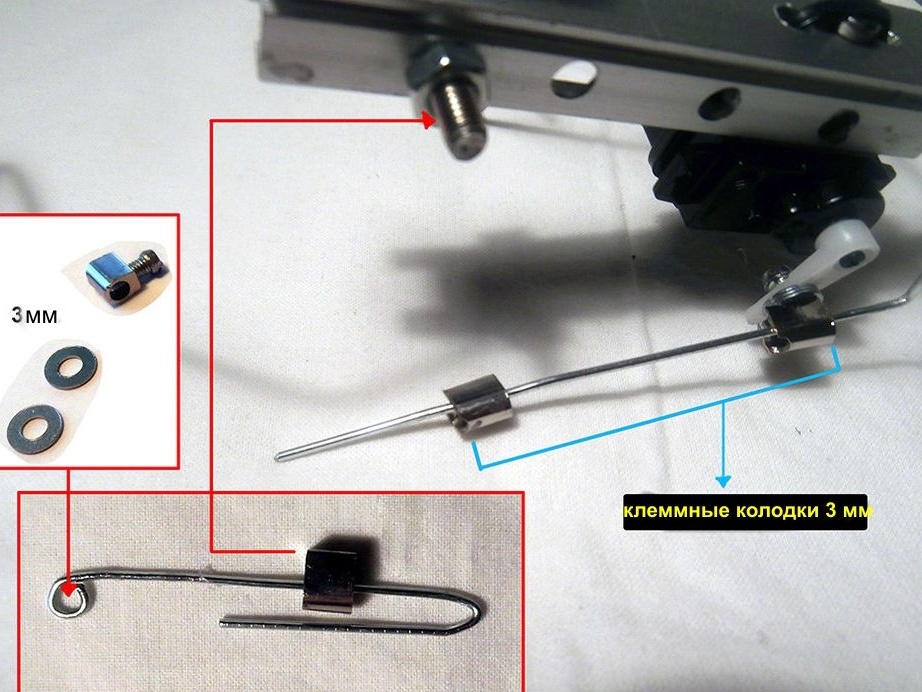
(2x) klemmenblokken (3 mm)
(1x) klemmenblokken (4 mm)
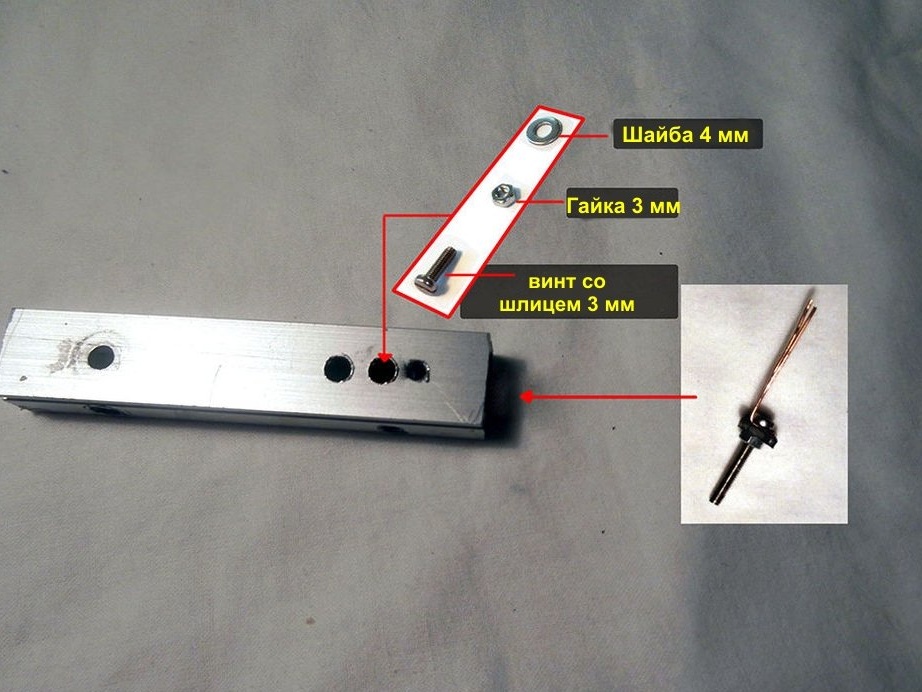
(1X) Gebruikt aluminium profielblok
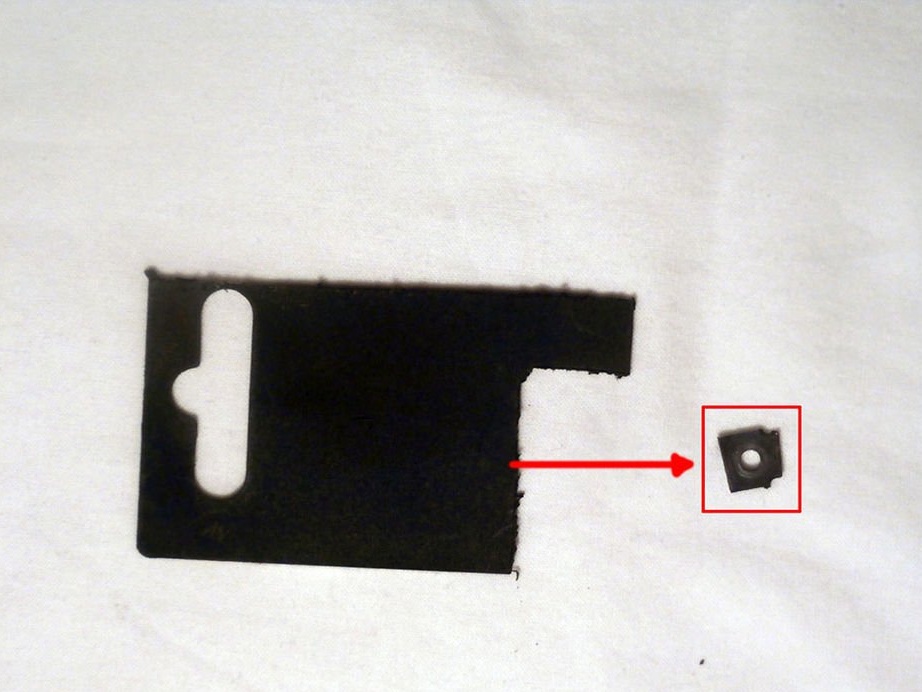
(1X) stuk plastic
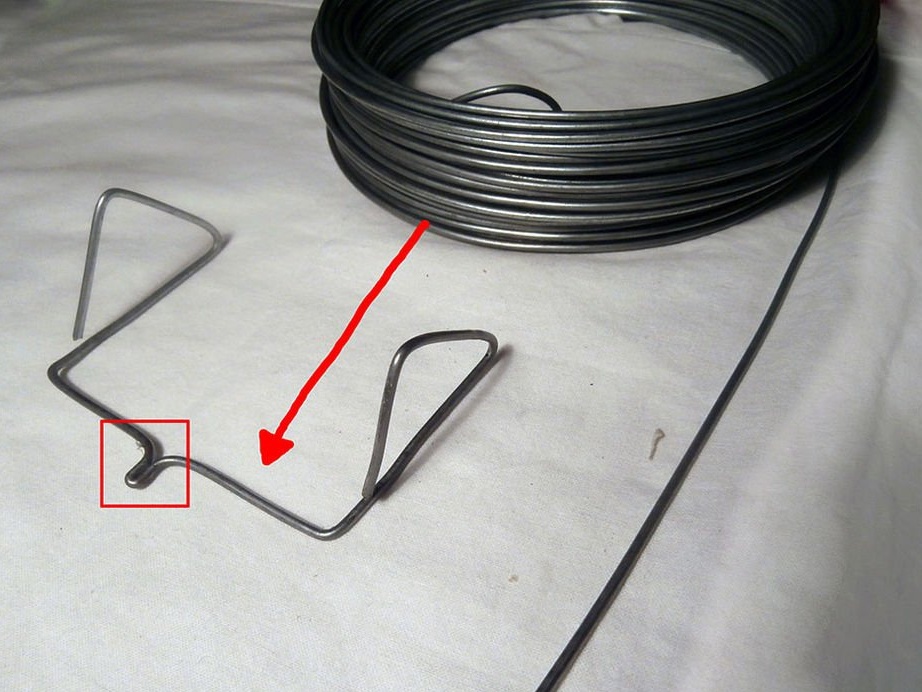
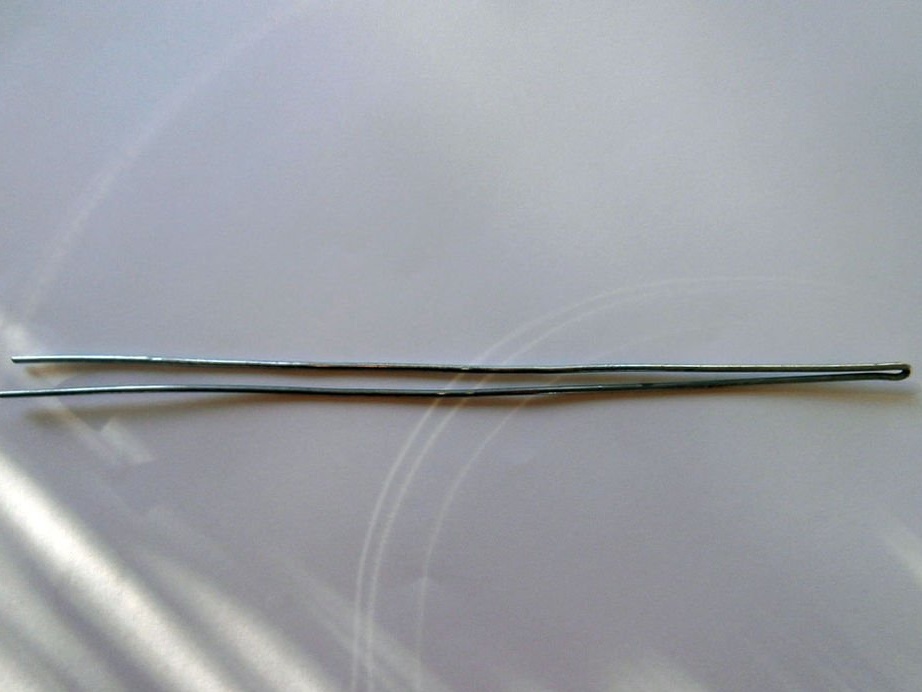
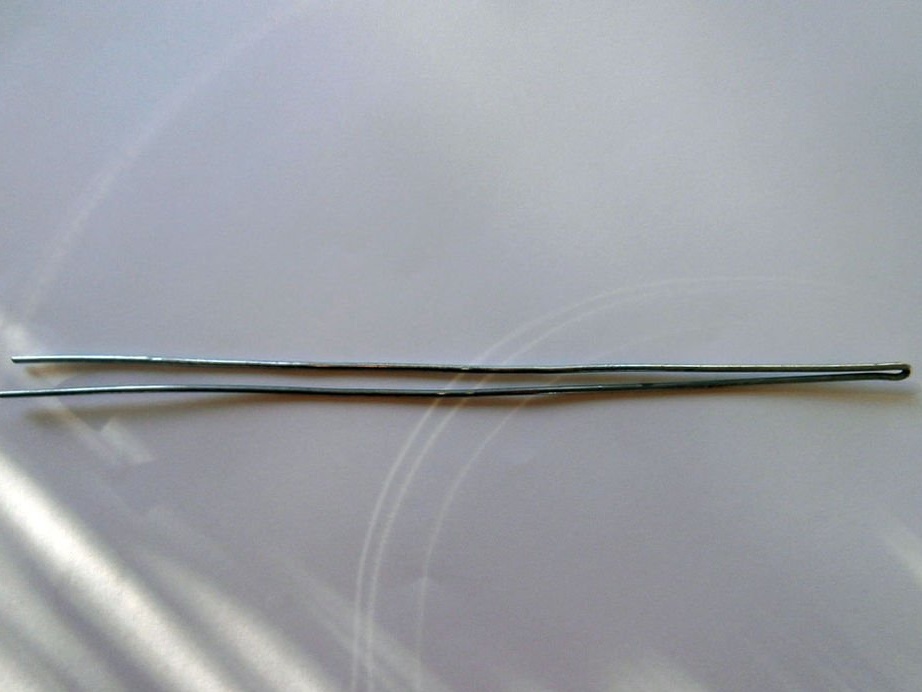
Staaldraad (2 mm)
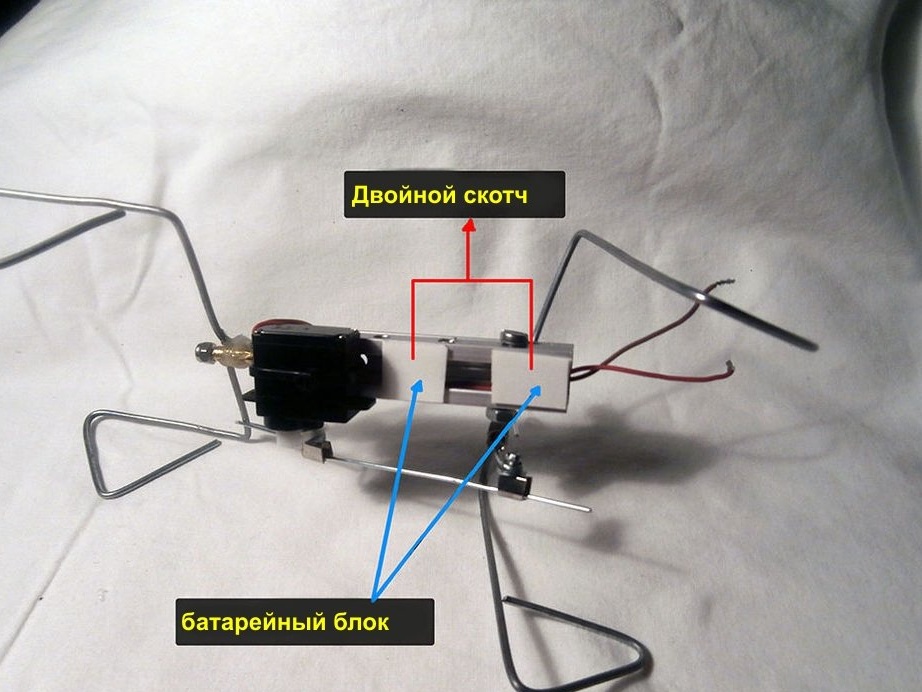
Dubbel plakband
Koperen buis
(1X) kleine klem
(1X) batterij (2 x AAA)
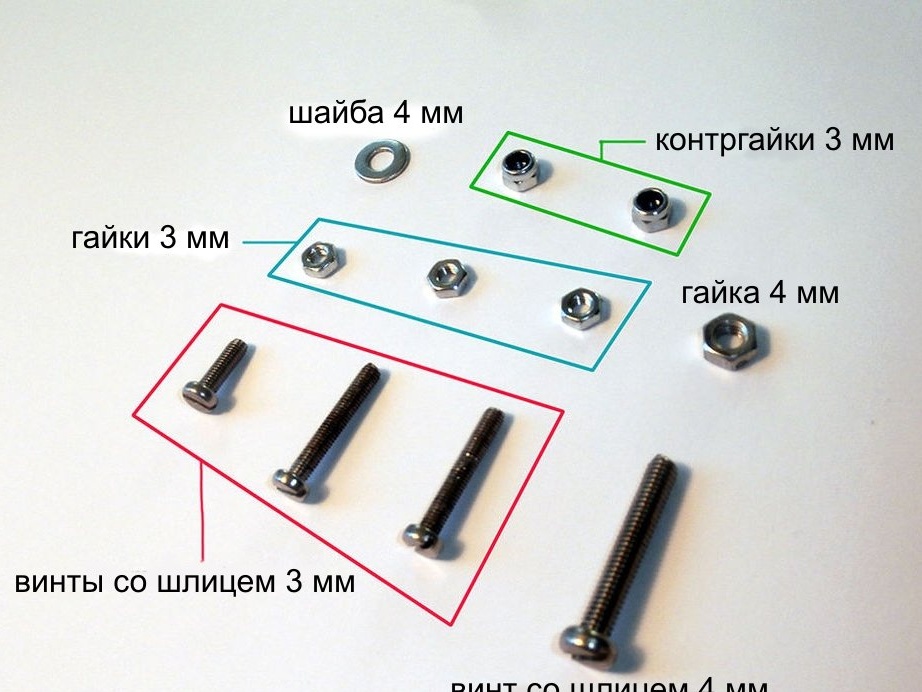
(2X) borgmoeren (3 mm)
(3x) moeren en schroeven (3 mm)
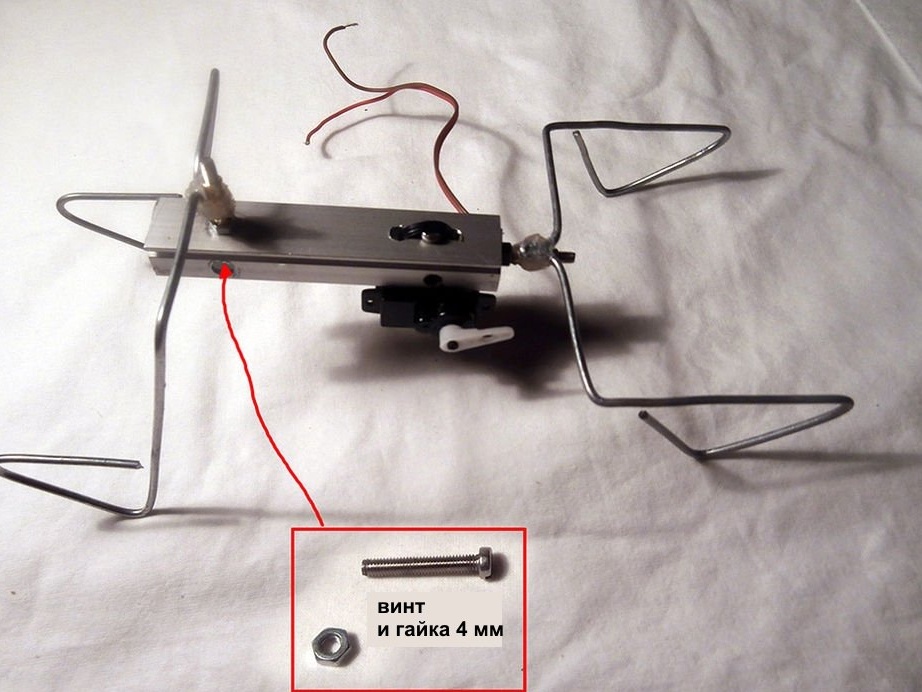
(1x) moeren en schroeven (4 mm)
(5x) ring (3 mm)
(1X) ring (4 mm)
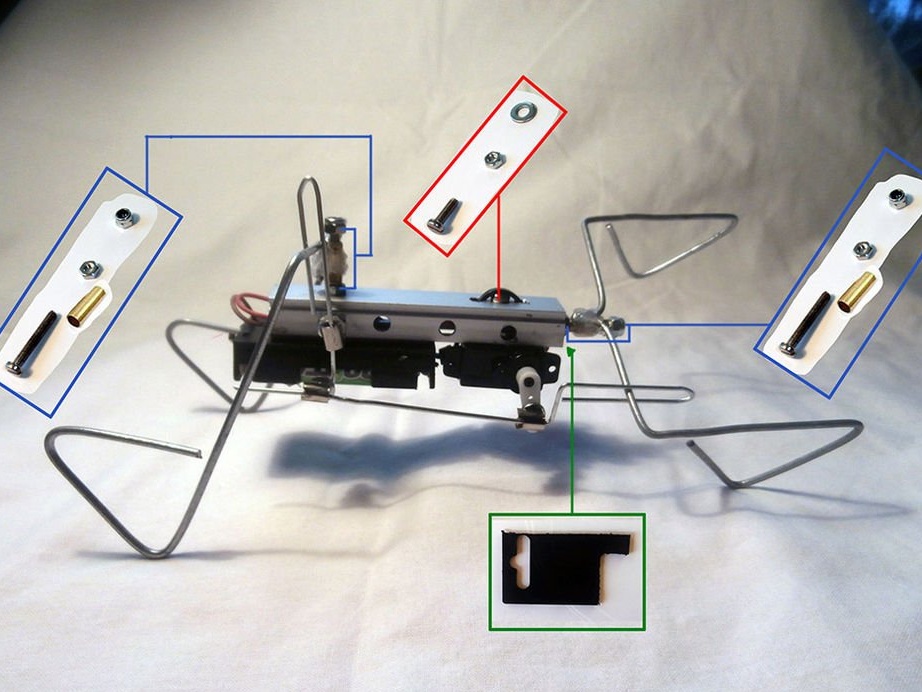
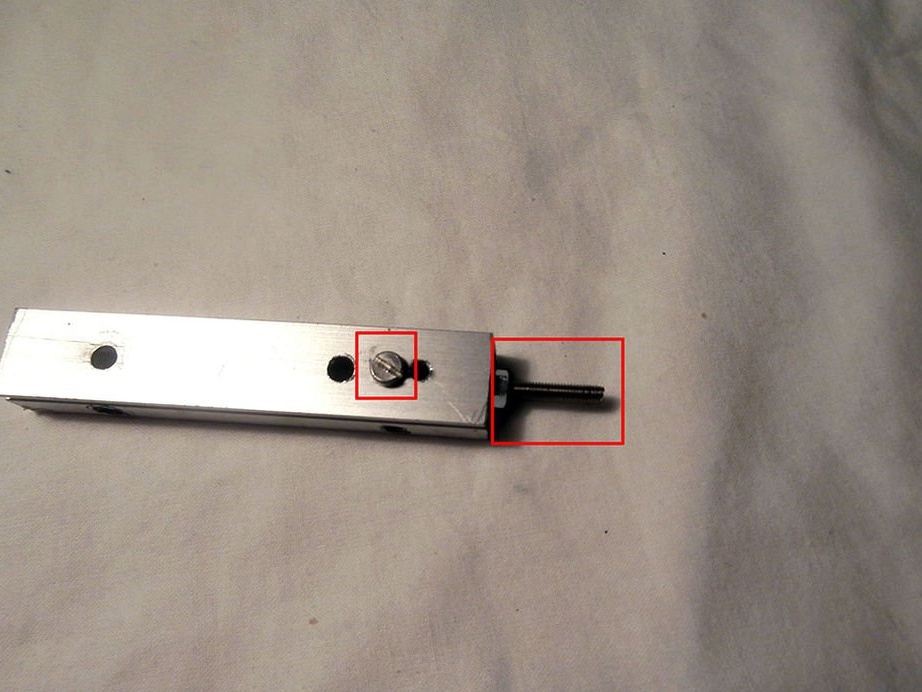
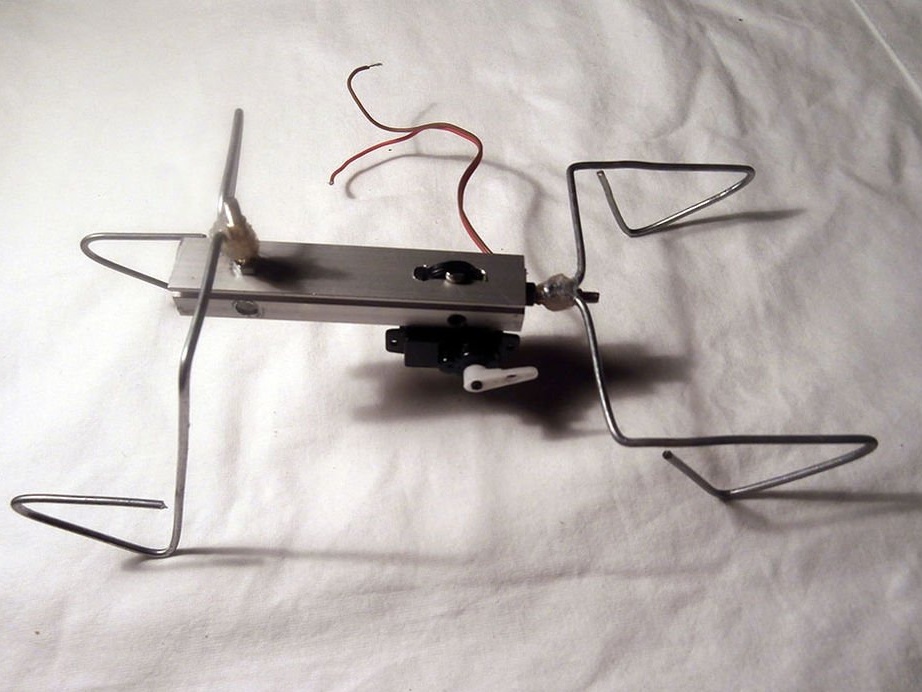
Stap 3: Onderdelen monteren
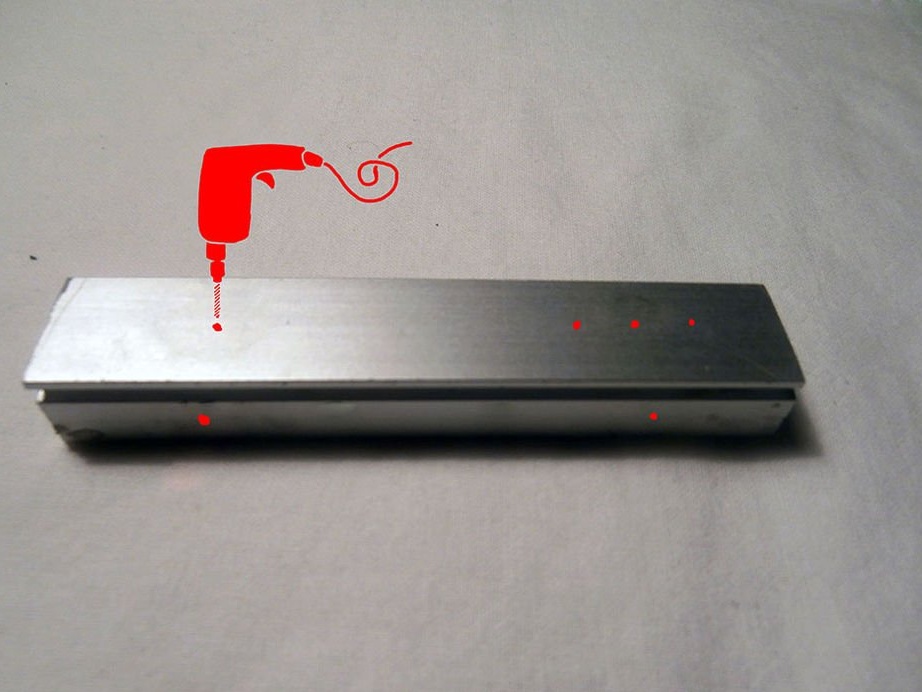
Stap 4: Tools
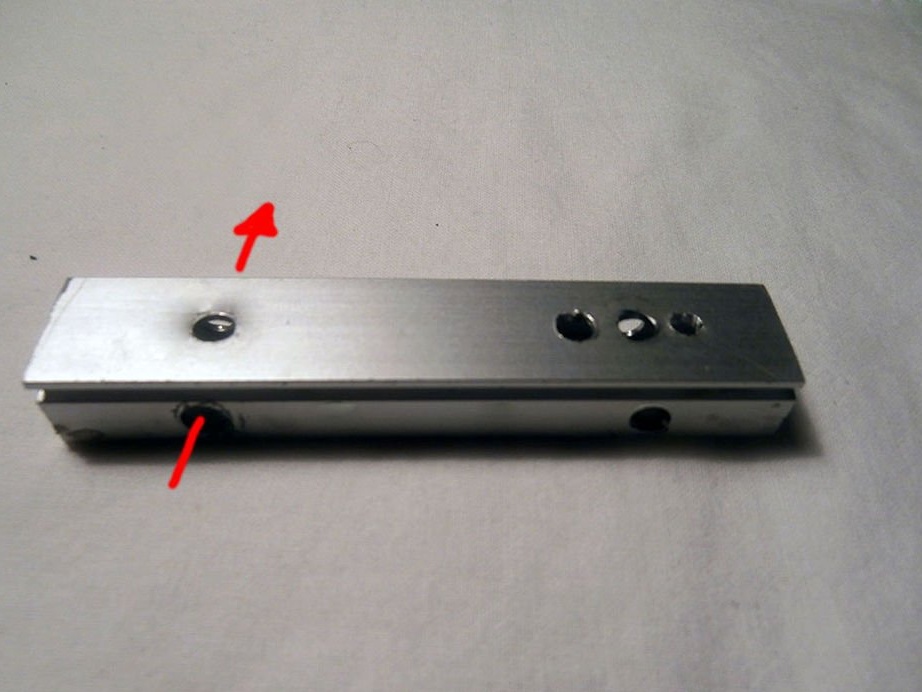
Stap 5: huisvesting

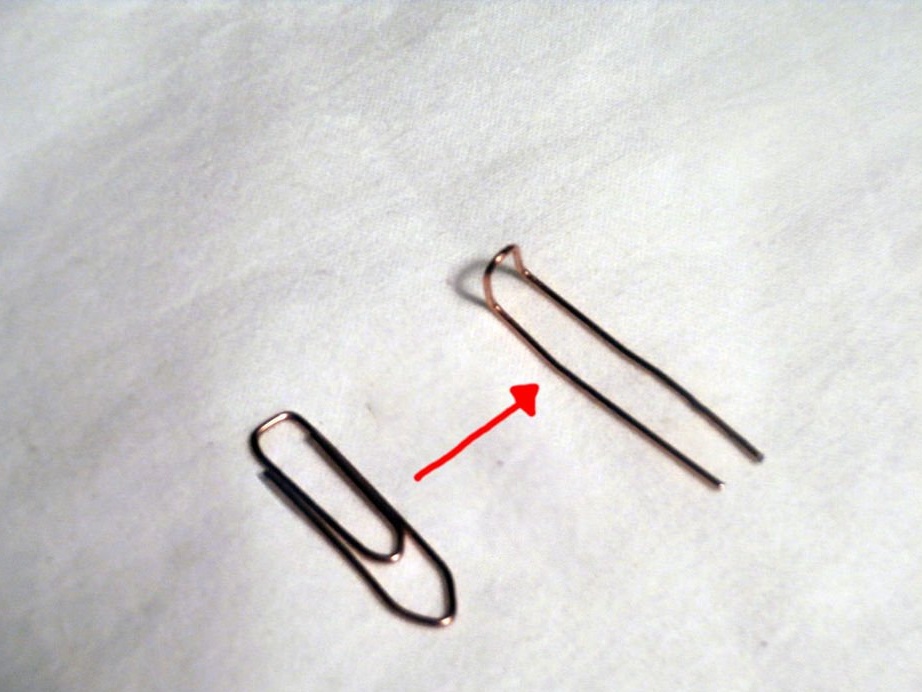

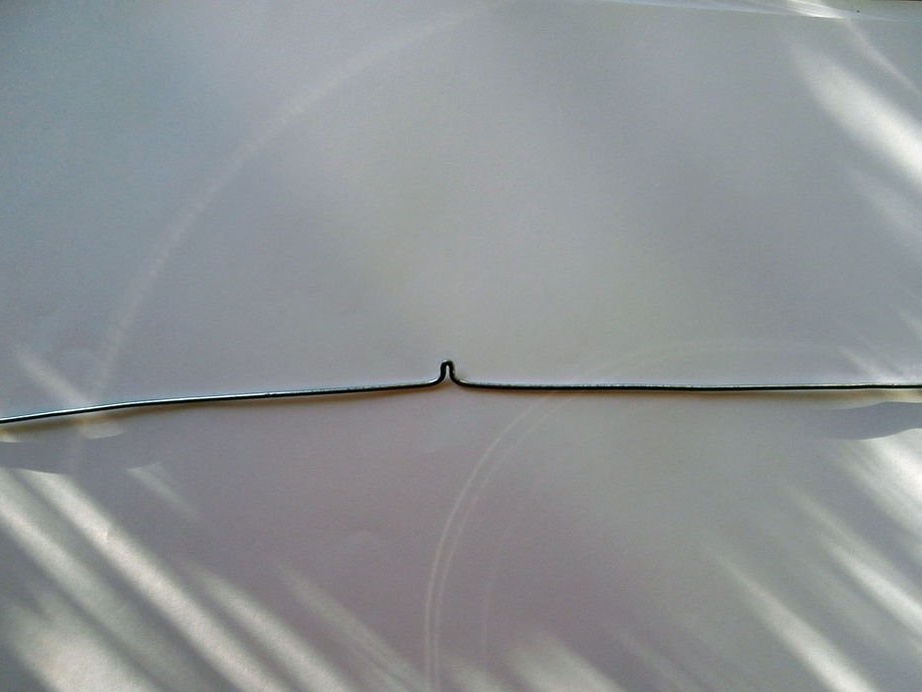
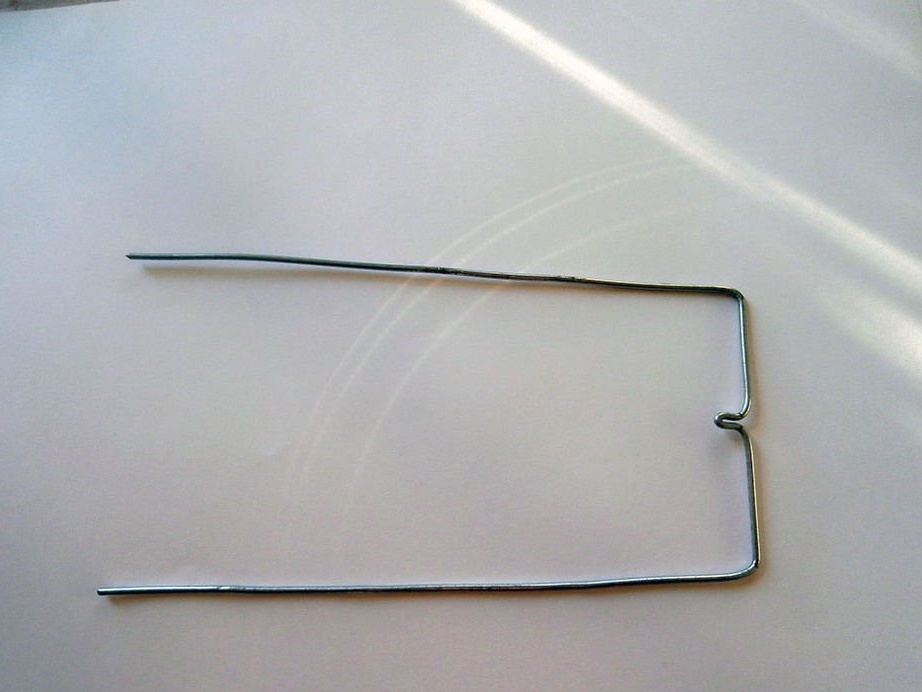
Stap 6: voorpoten
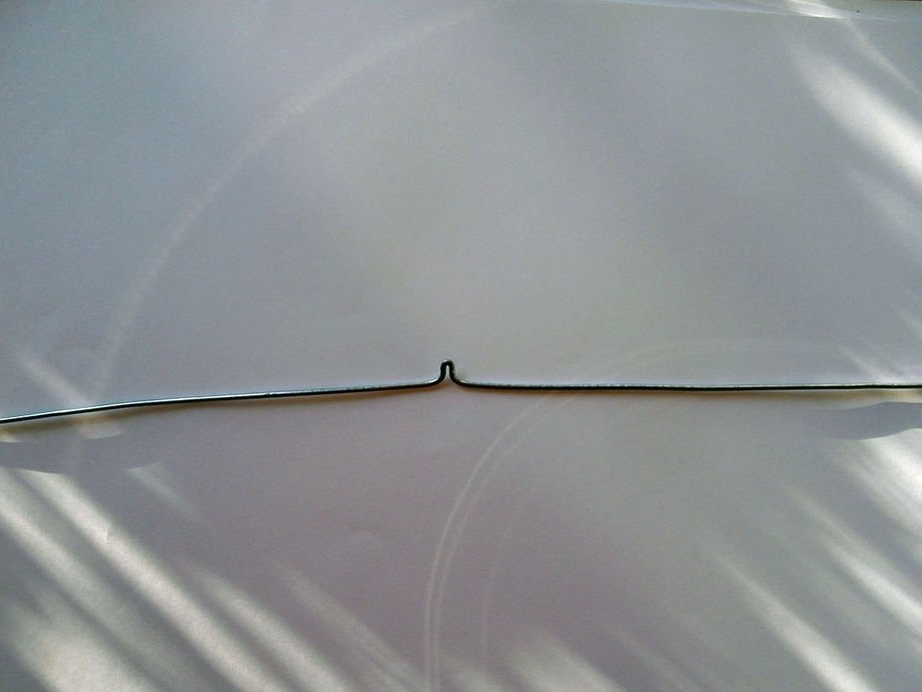
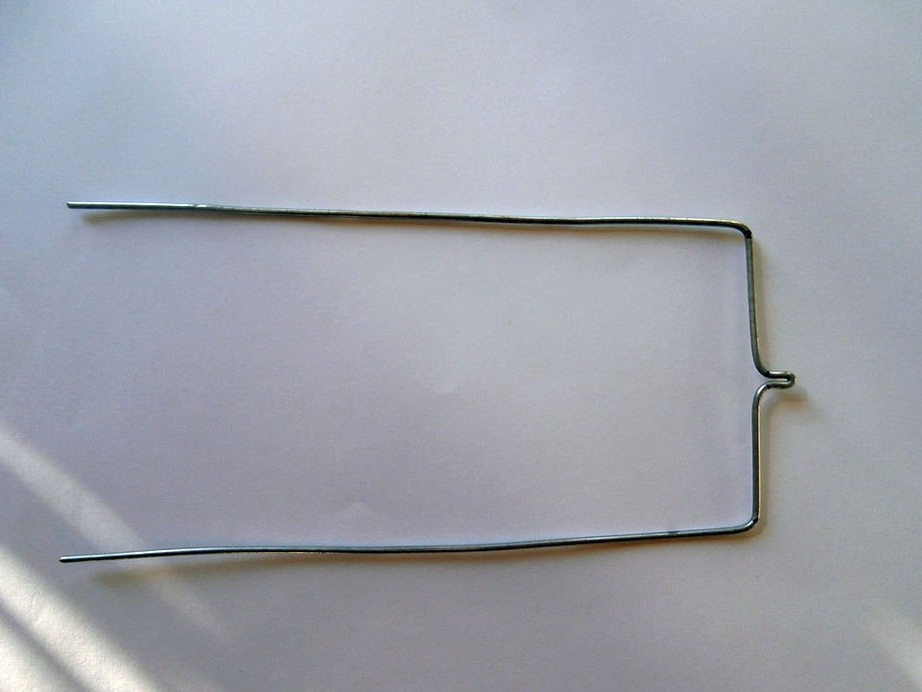
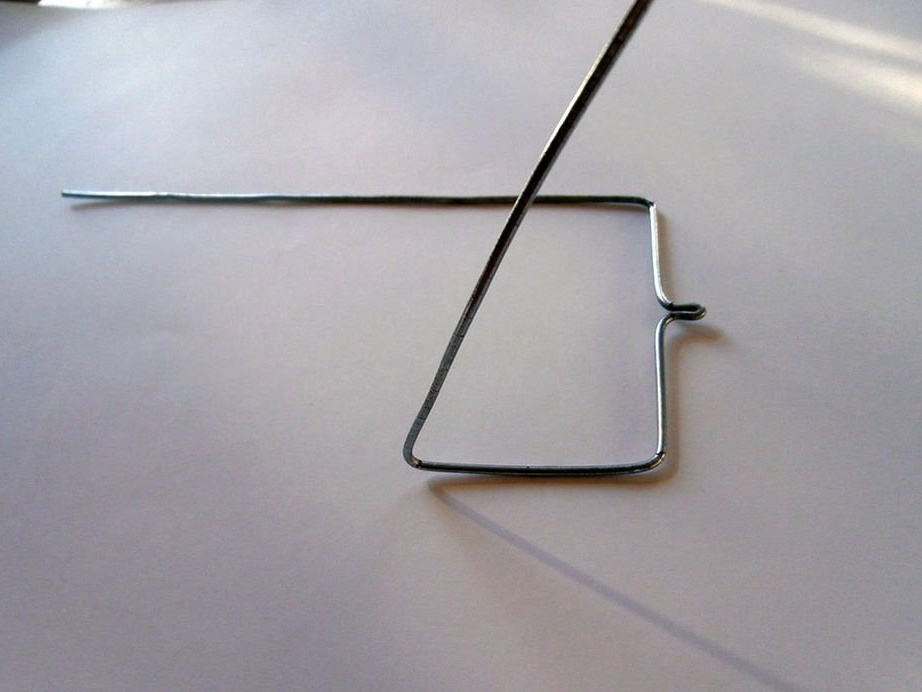
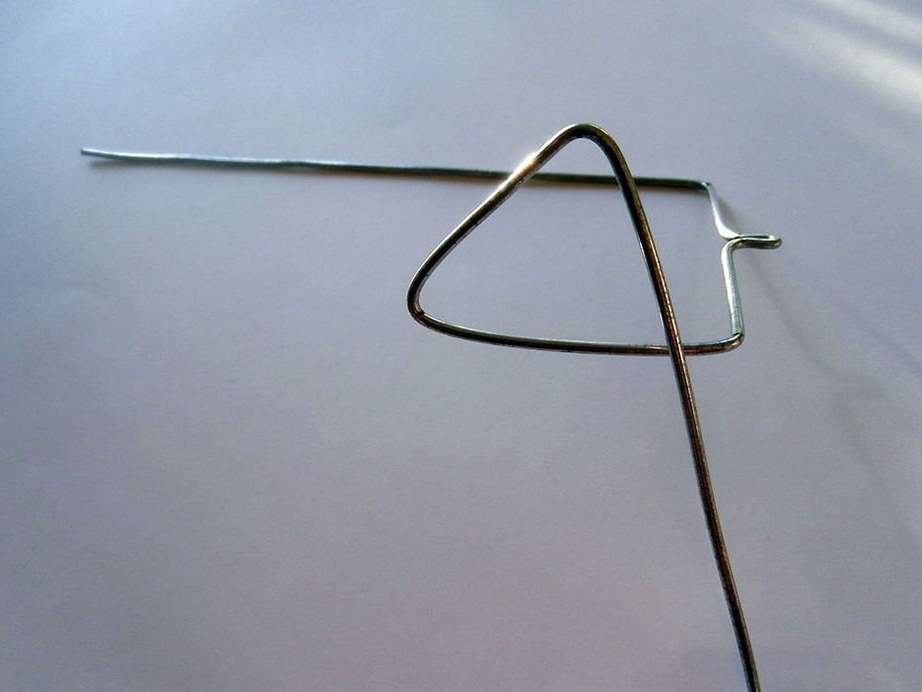
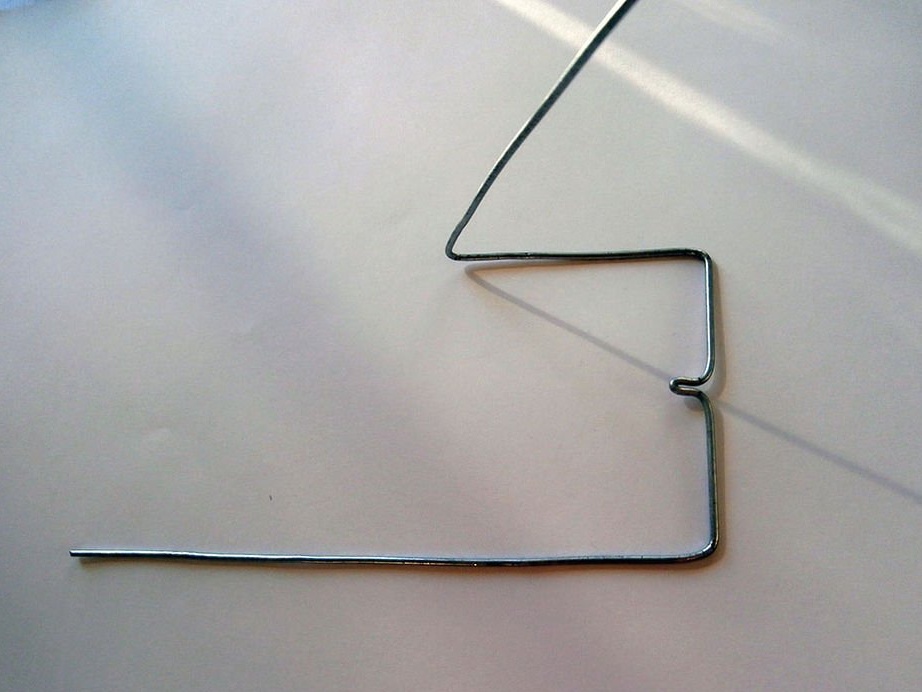
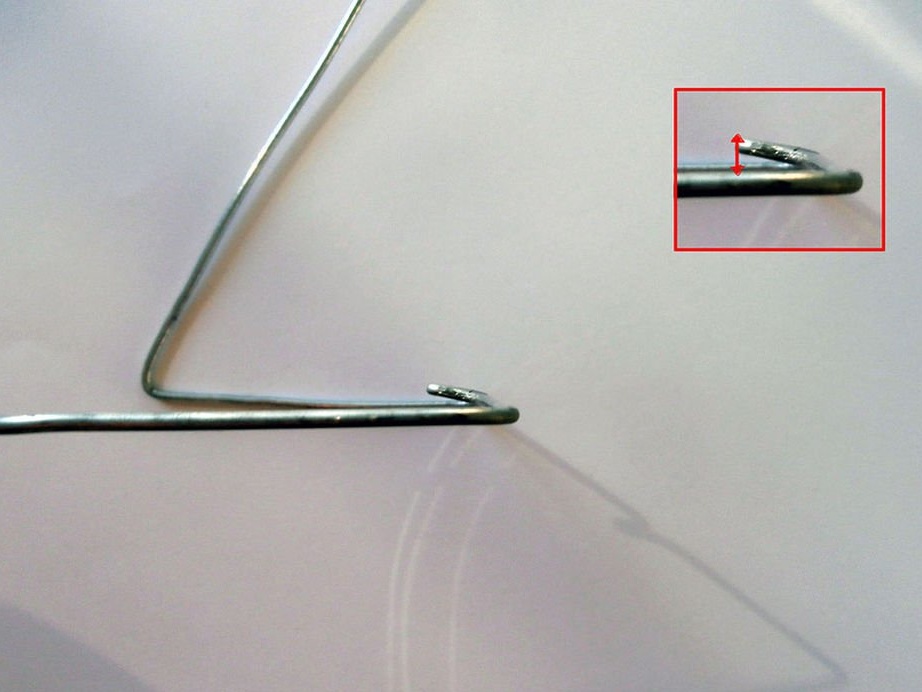
Stap 7: Achterbenen
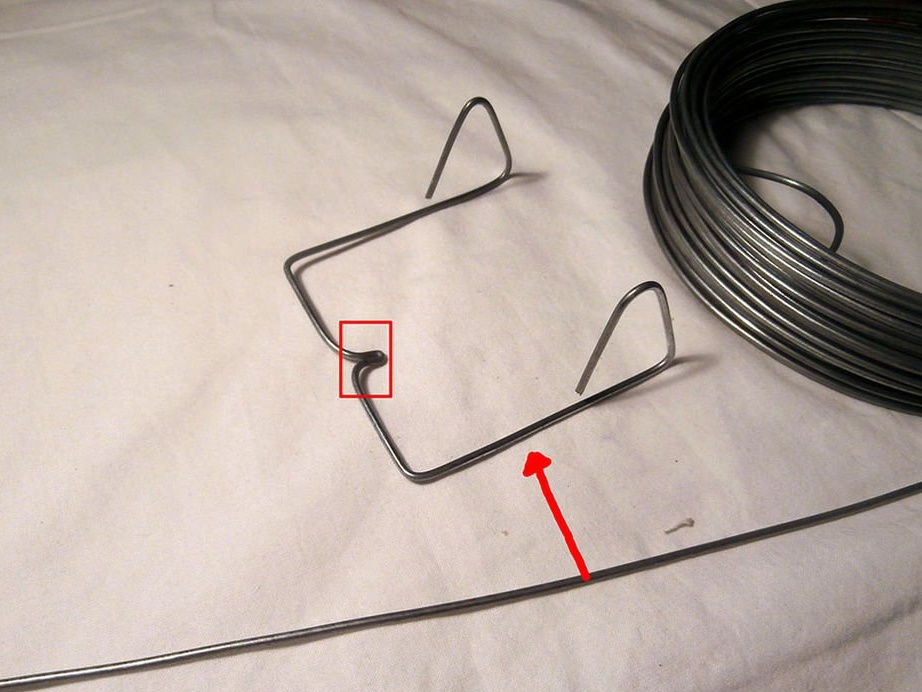
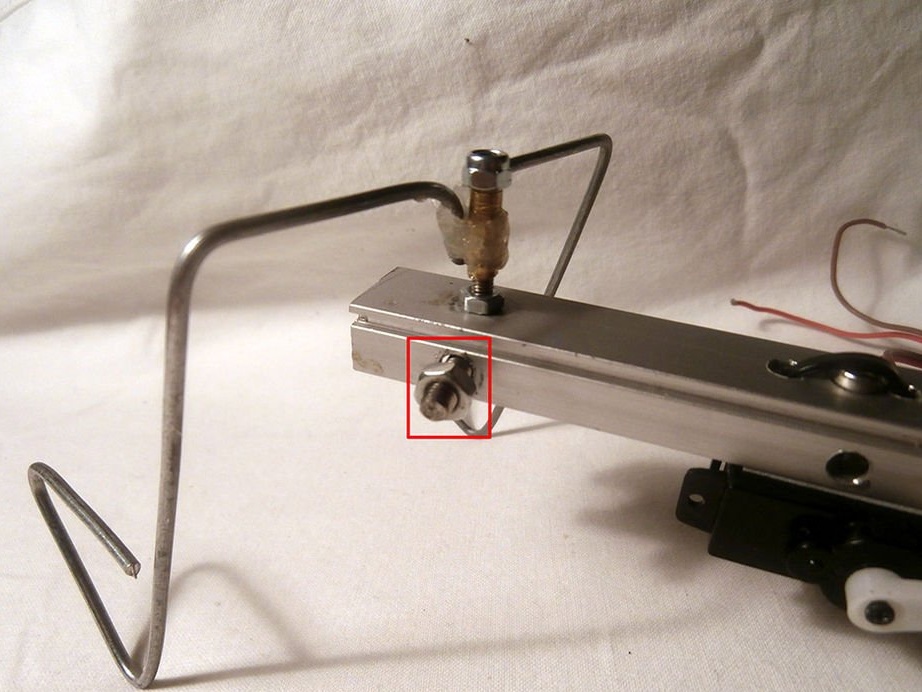
Stap 8: de voeten bevestigen
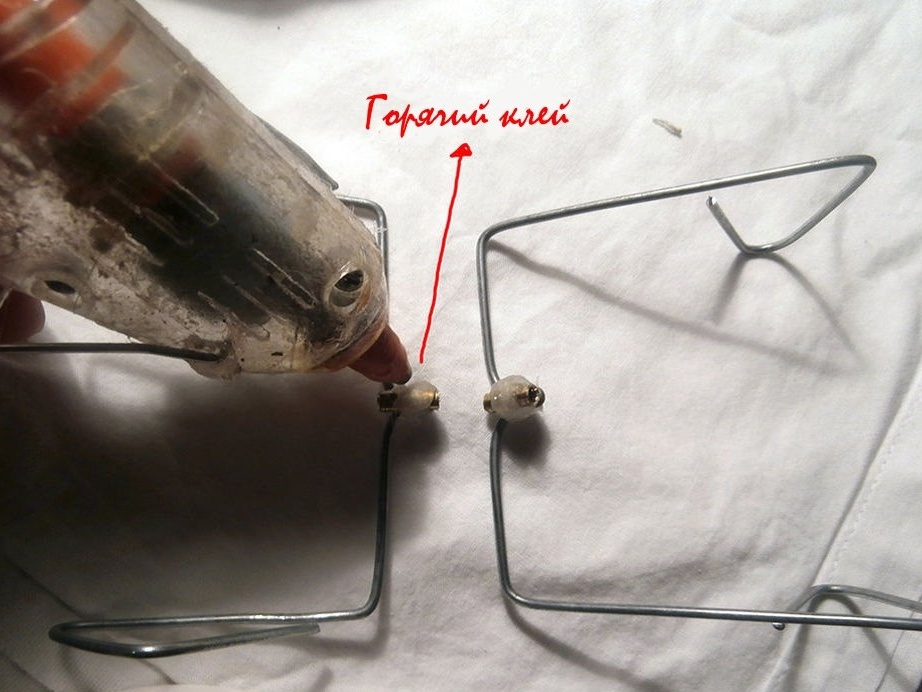
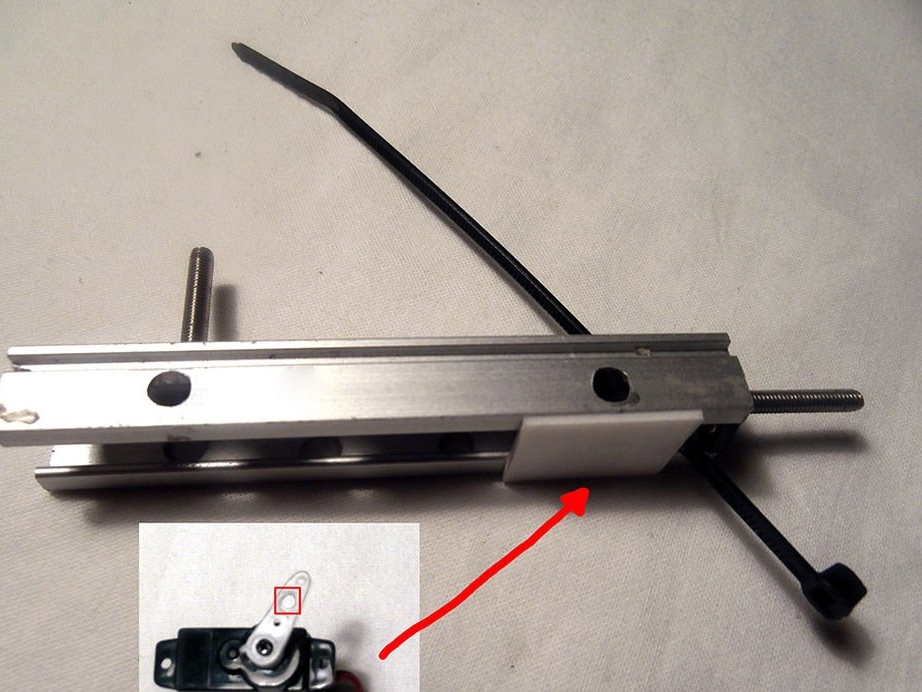
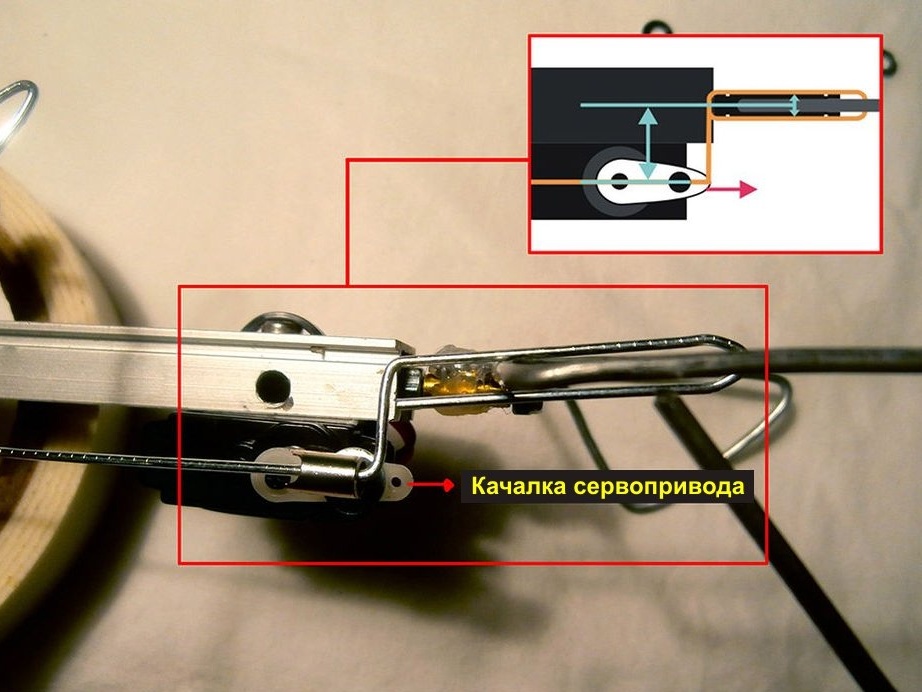
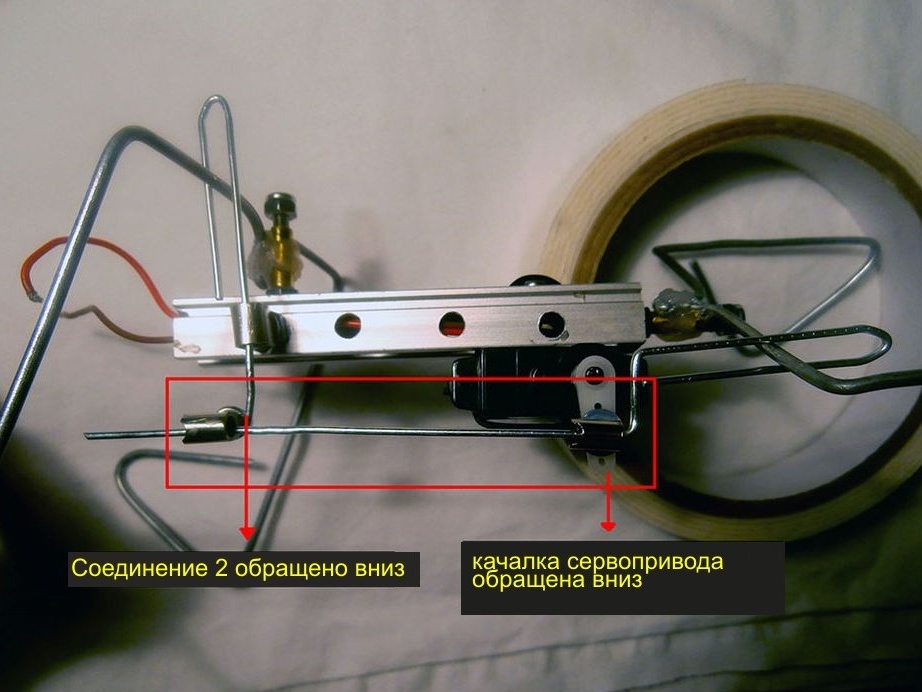
Stap 9: Koppeling
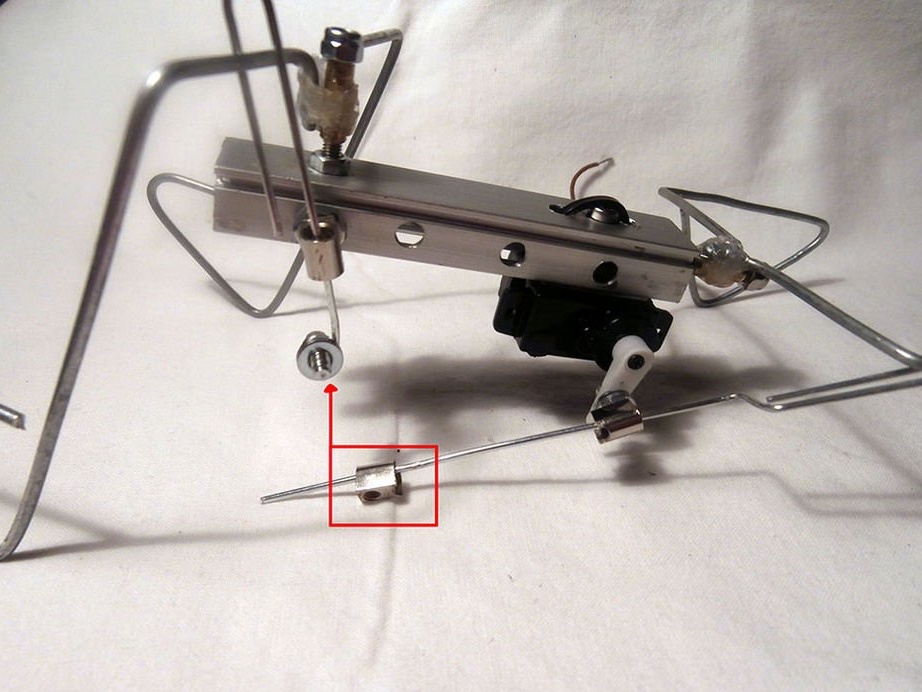
Stap 10: Koppelingsmontage
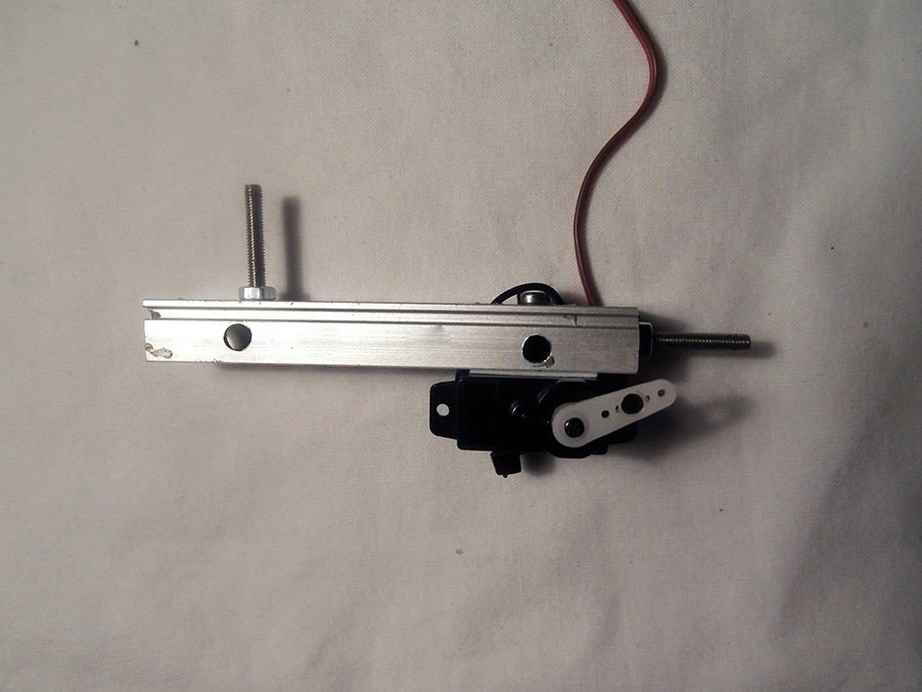
Stap 11: de laatste hand
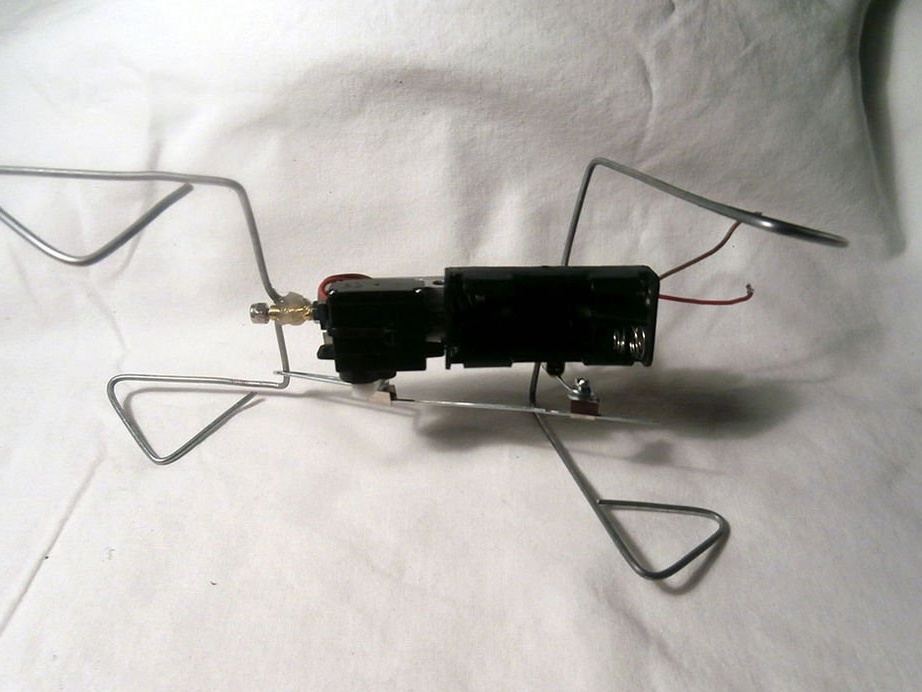
Uiteindelijk bedraad je gewoon de servo en de batterijen, en de robot Uil begint een reis rond uw huis :)