
Vandaag maken we een kleine radiografisch bestuurbare machine, niet zomaar een machine, maar een echt spionageapparaat.
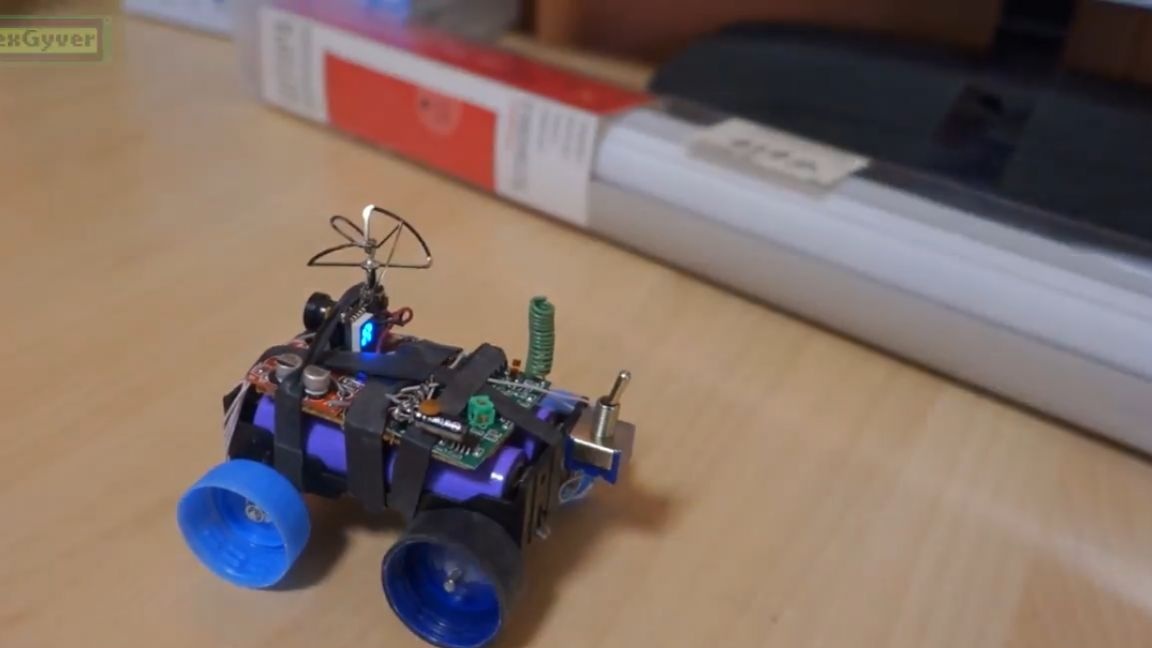
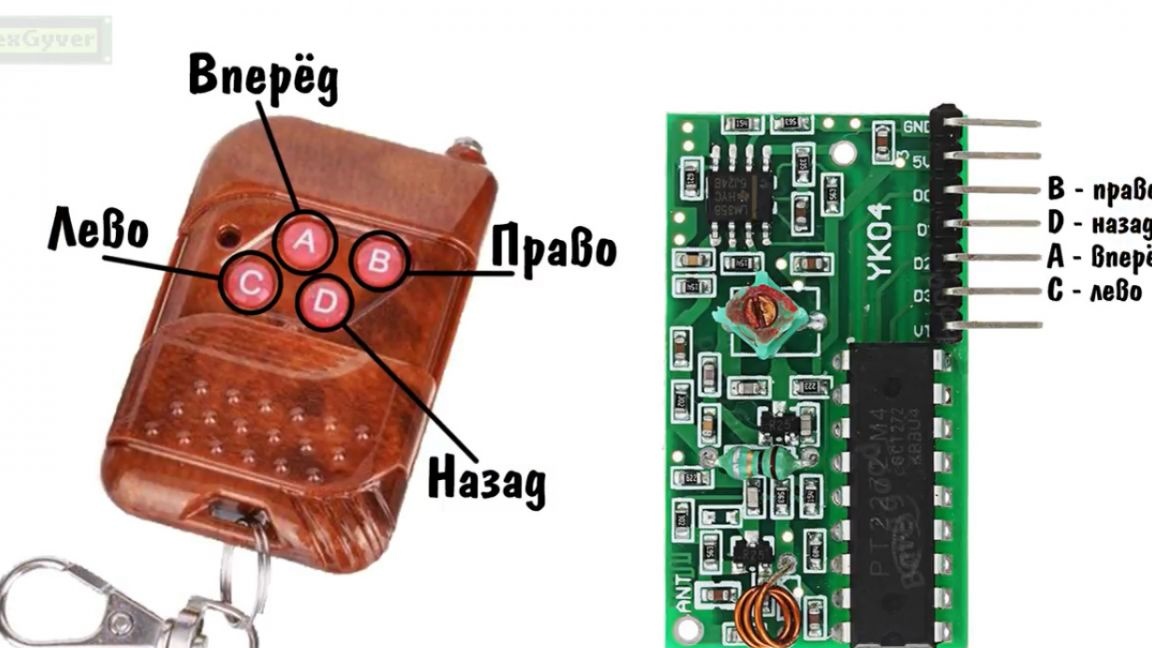
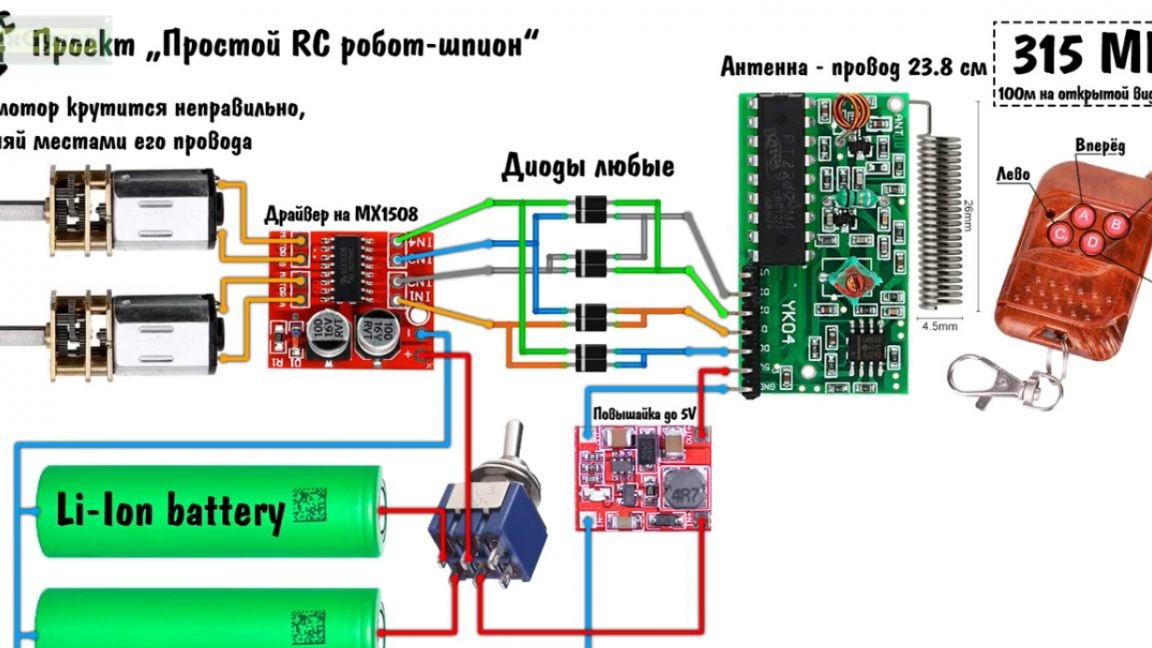
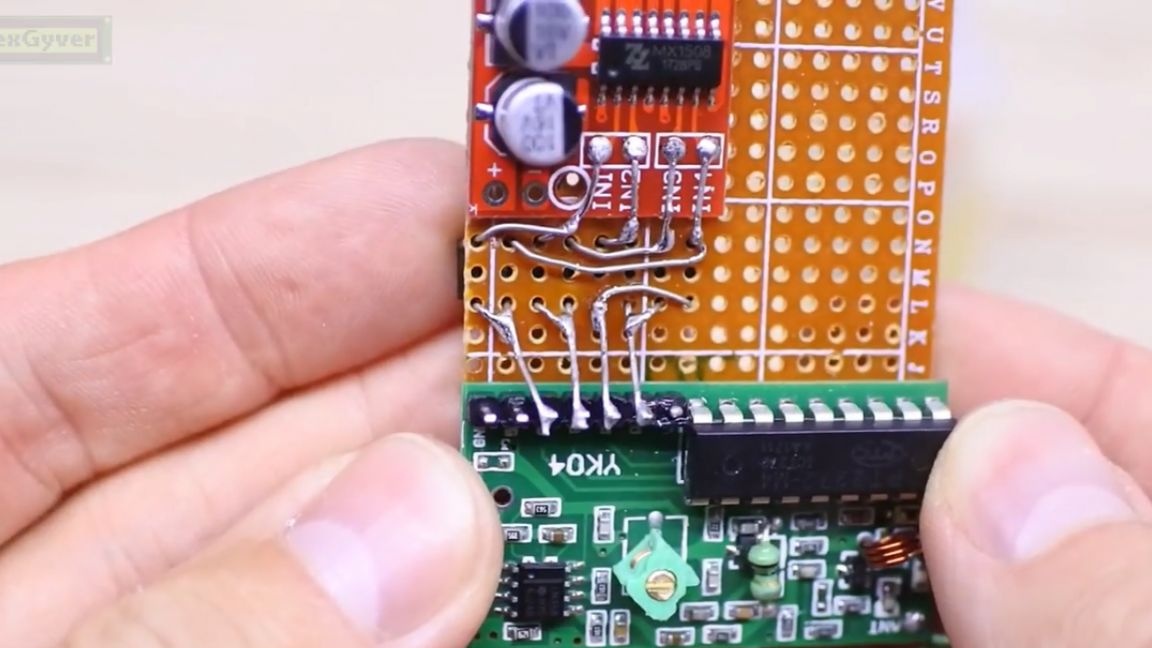
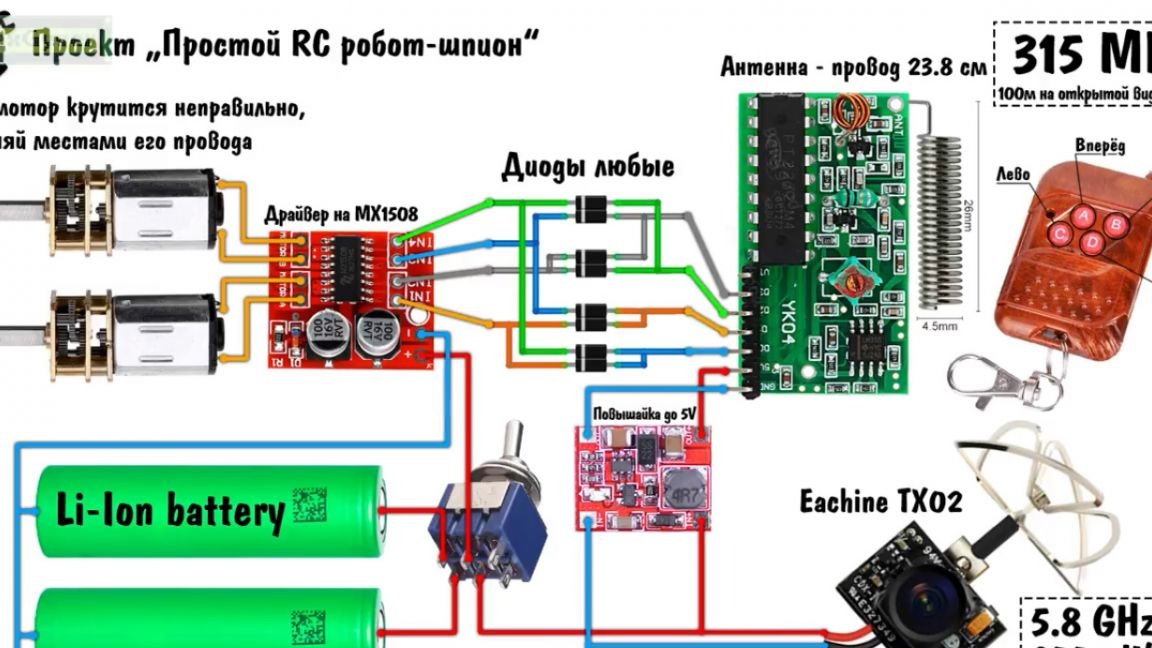
De auteur van dit zelfgemaakte product is AlexGyver. Dus laten we beginnen. Dus kijk, er is zo'n 315 MHz zendermodule in de vorm van een afstandsbediening met vier knoppen en een ontvanger met vier logische uitgangen voor elke knop.
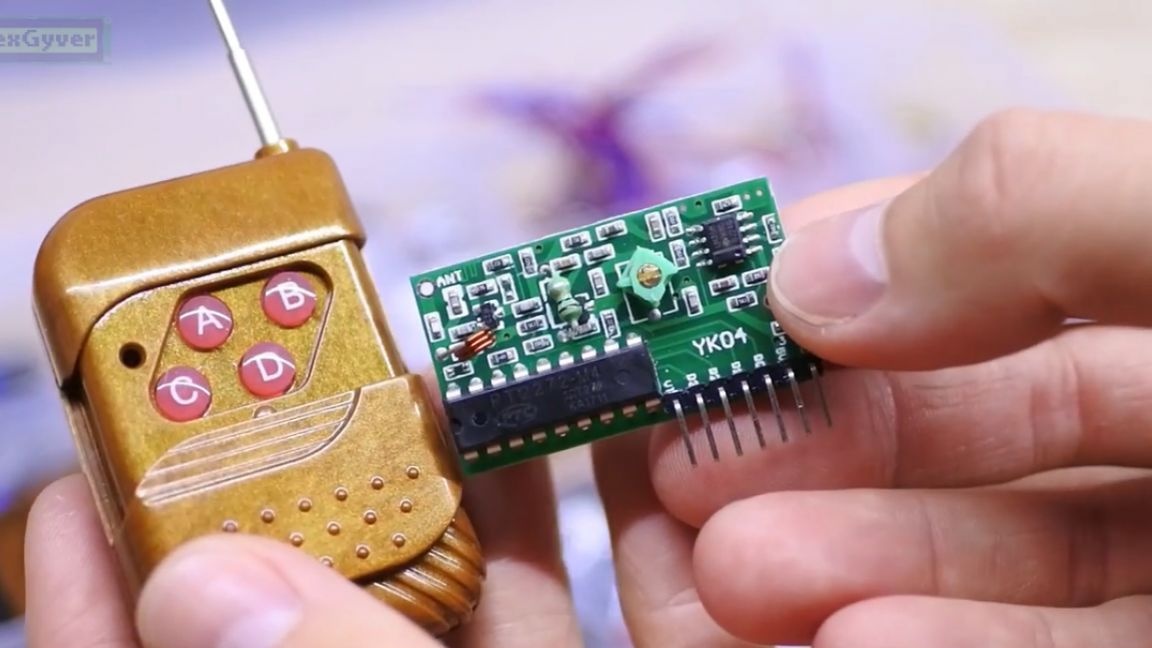

Dit werkt allemaal op een heel voor de hand liggende manier: ze drukten op een knop van 5 volt op de overeenkomstige output. Al een goed potentieel voor arduino projecten. Er is ook een driver voor 2 motoren op de mx1508-chip.
Componenten voor de robot (links naar Aliexpress):
FPV:

Dit is een modern bijna analoog aan de oude kreupele l298. Bij hem is alles ook heel eenvoudig, we verbinden 2 motoren en draaien ze, met een logisch signaal, in de ene of de andere richting.
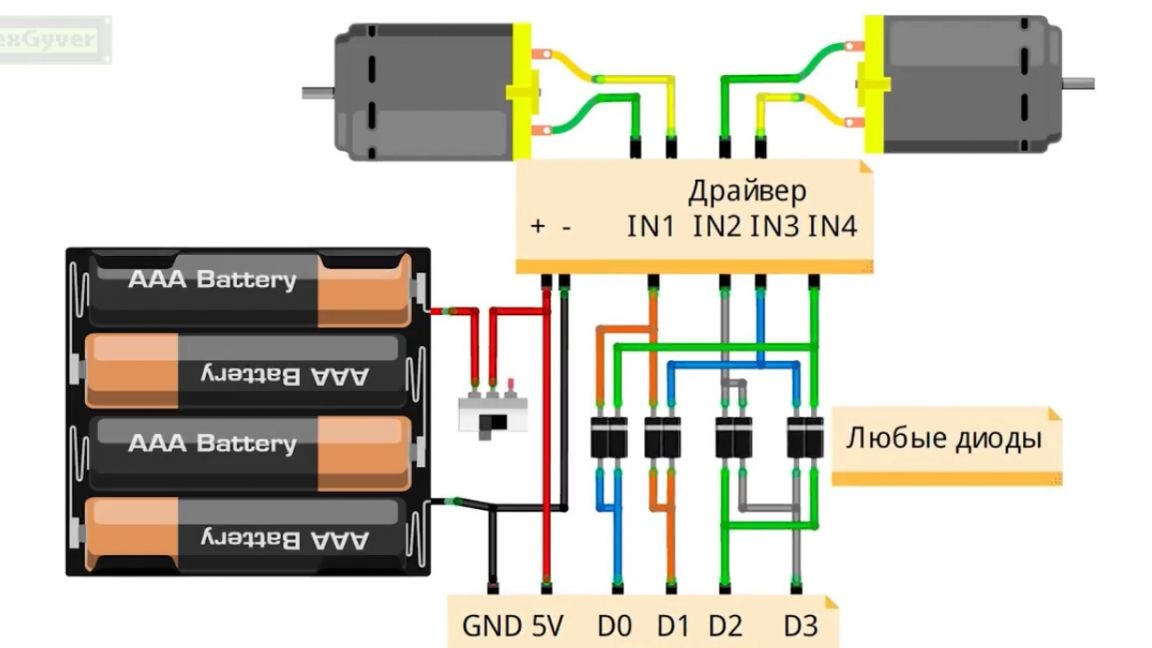
En er is niets eenvoudiger dan deze 2 modules aan te sluiten en de machine via een tankschema te besturen. Het blijft alleen om erachter te komen hoe de ontvangermodule van de motoraandrijving moet worden aangesloten, zodat de motoren worden ingeschakeld wanneer we dat nodig hebben, dat wil zeggen dat de logica van signaaloverdracht ongeveer zo zou moeten zijn, overeenkomend met de knoppen op de afstandsbediening.
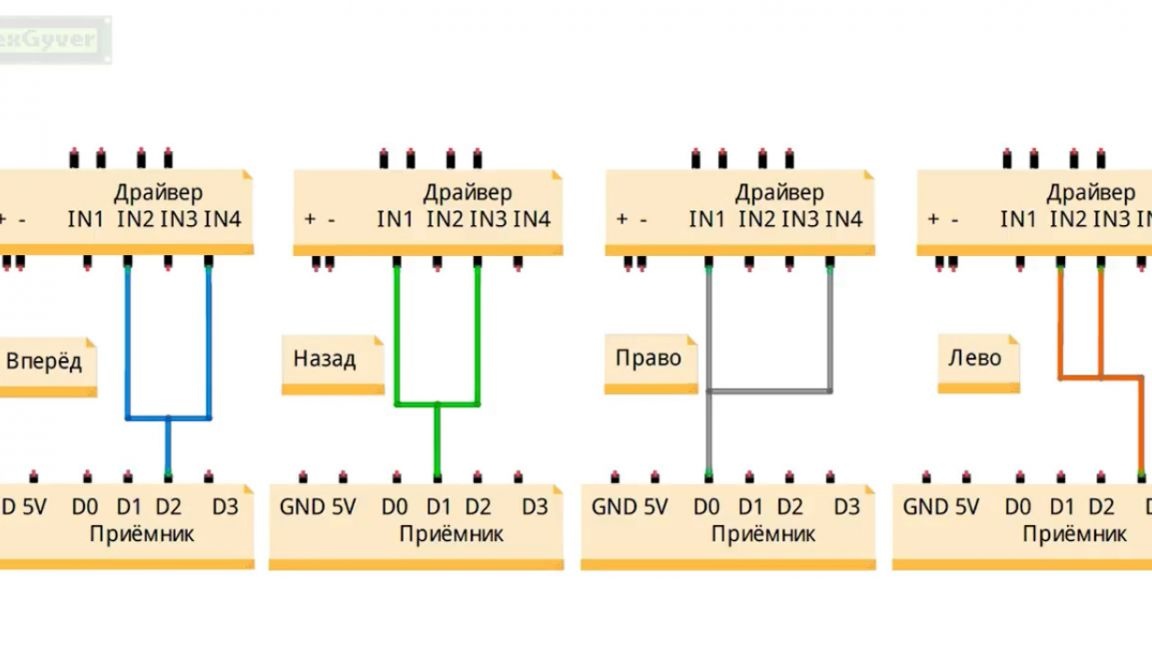
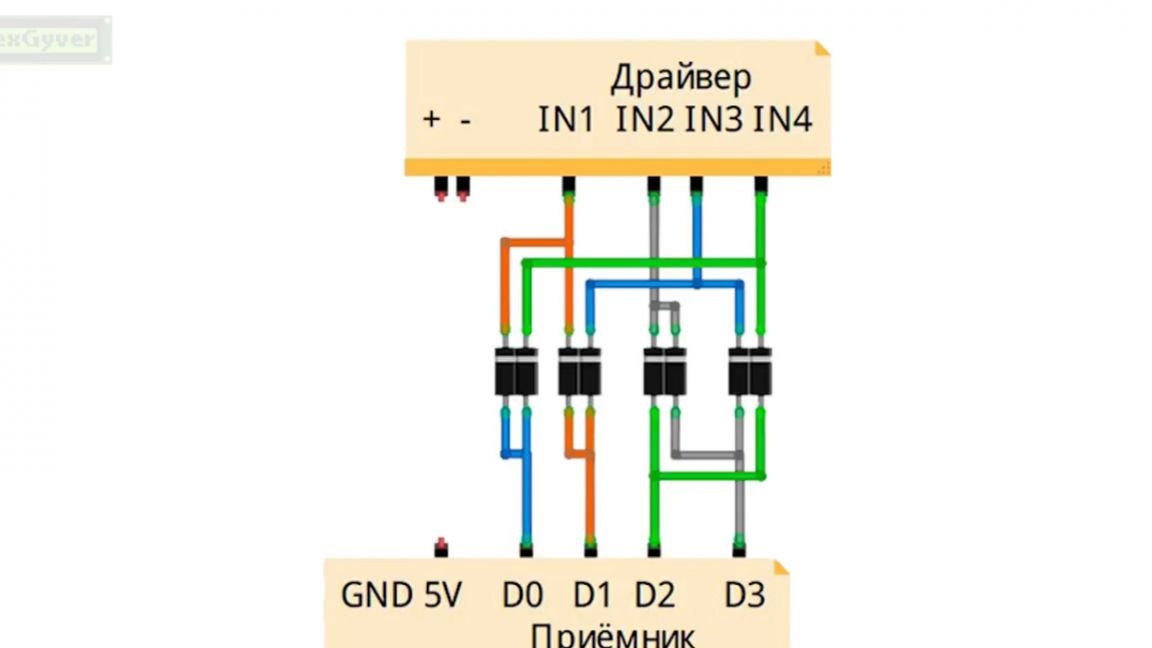
Circuits voor kanalen afzonderlijk werken prima, maar ik wil alles tegelijk. Het is duidelijk dat het simpelweg onmogelijk is om alle draden te nemen en aan te sluiten zoals ze zijn, omdat de controlekanalen met elkaar interfereren en de motoren gewoon niet draaien, als er natuurlijk niets anders brandt. We moeten de controlekanalen beschermen tegen wederzijdse beïnvloeding en circuits. En dan komen gewone diodes die in slechts één richting stroom doorgeven, te hulp.

En in deze vorm kan het circuit al gecombineerd worden. We optimaliseren het enigszins voor compactheid en meer zichtbaarheid, nou, het blijft ons om stroom aan te sluiten, bijvoorbeeld van vingerbatterijen en motoren, we kunnen ook een schakelaar toevoegen, maar helaas bleek alles niet zo eenvoudig.
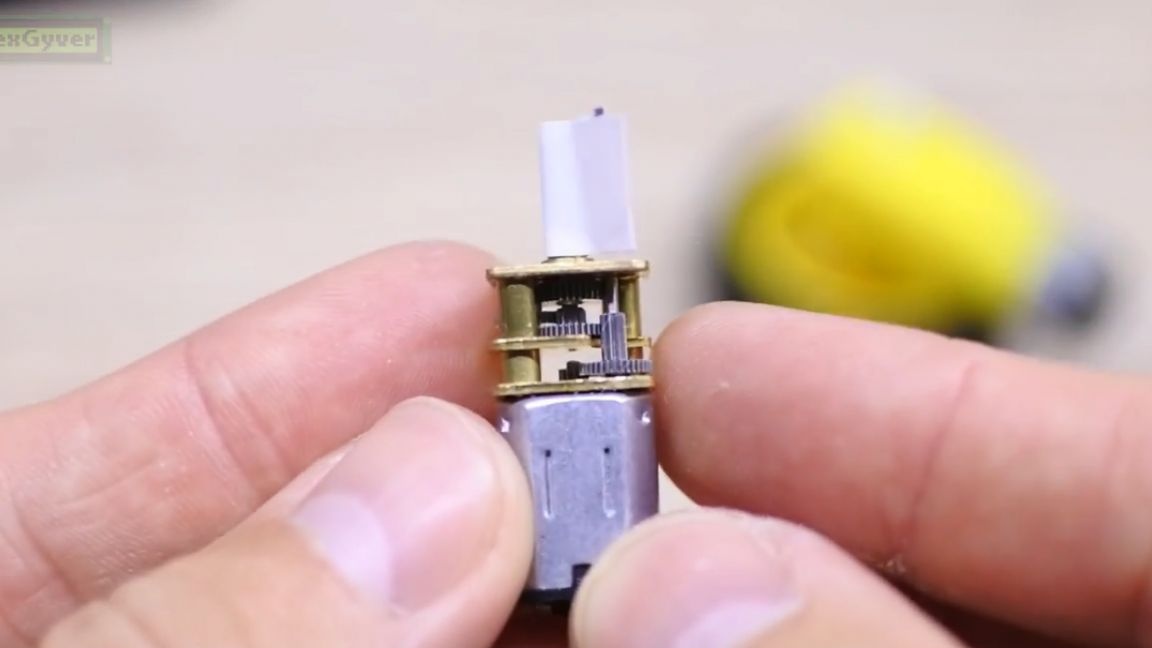
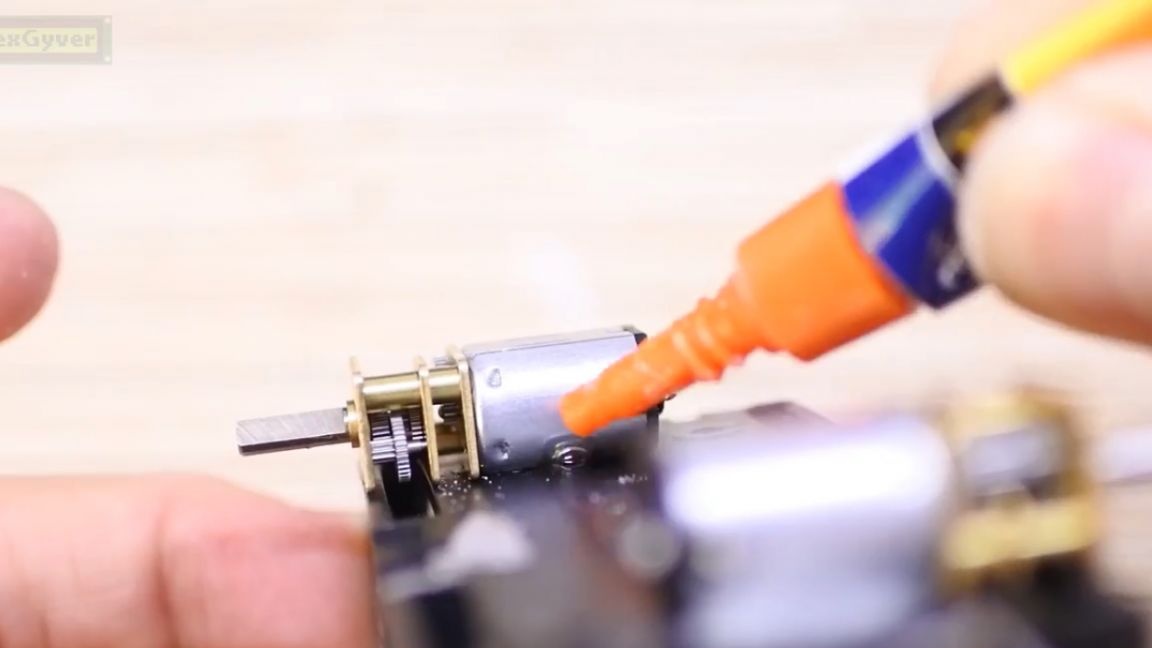
De Chinezen hebben prachtige kant-en-klare reductiemotoren voor zelfgemaakte robots. Ze worden onmiddellijk verkocht met wielen. En er zijn micro-motorreductoren, we zullen ze gebruiken omdat we een mini-spionrobot willen maken.

Maar laten we voor de eerste test grote motoren solderen en om te testen zullen we het circuit op het breadboard monteren. We nemen diodes en verbinden alles volgens het schema.
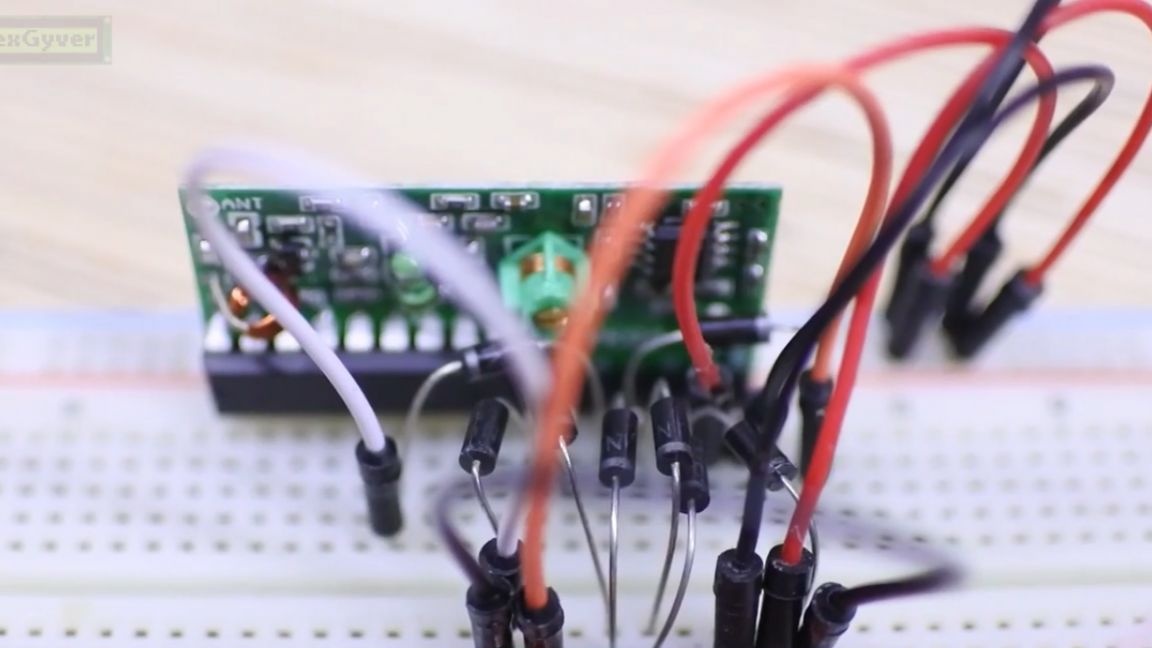
Nou, zoiets. We bevestigen de motorwielen volgens het principe op dubbelzijdige tape en het zal dit doen - dit is dezelfde lay-out.
We eten van 4 vingerbatterijen. Trek onmiddellijk aan de wielen antislipbanden uit de ringen uit de fietskamer. Laten we gaan!

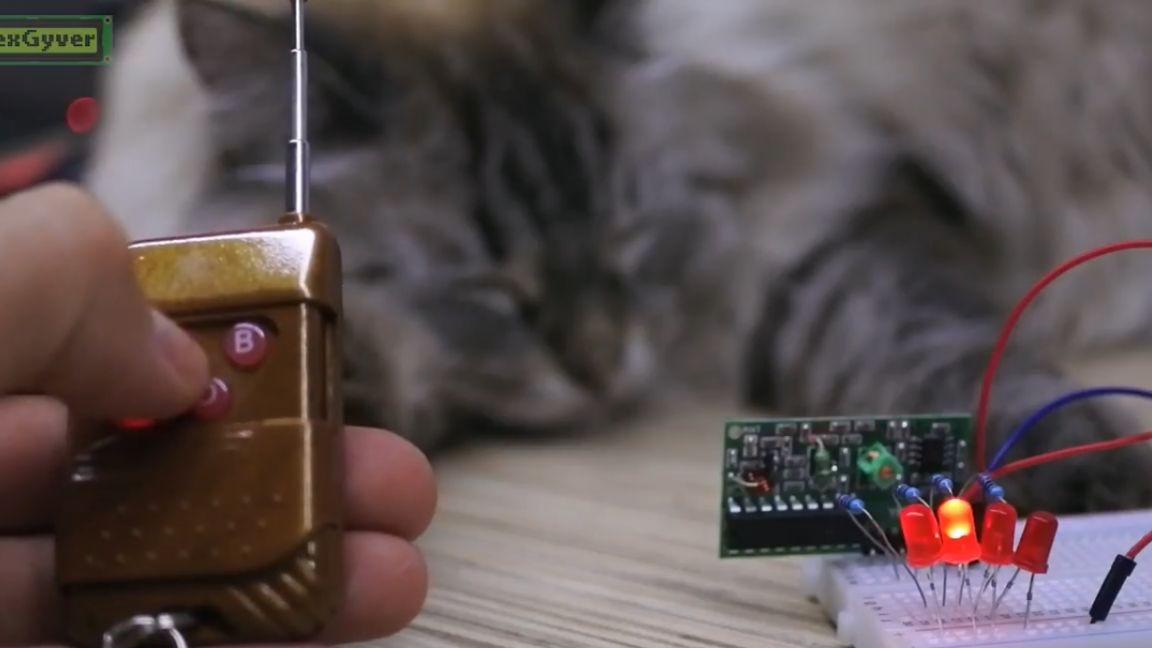
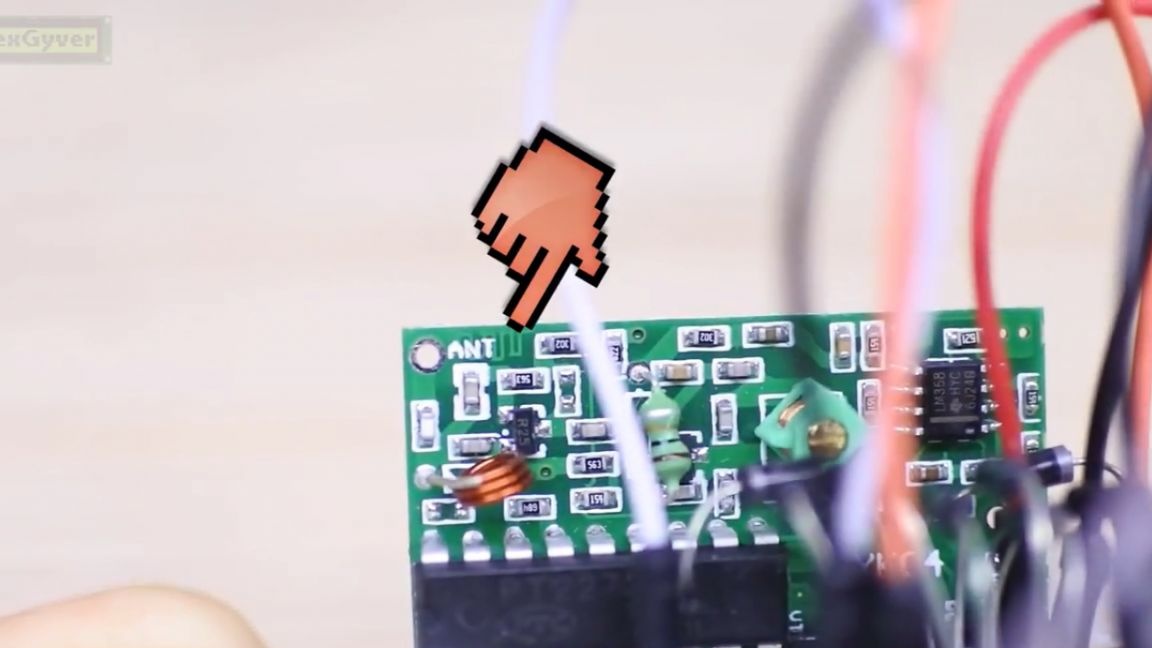
Maar ski's rijden niet.Terwijl de knop ingedrukt wordt gehouden, beweegt de machine schokkerig en tijdens de test met LED's zagen we dat het signaal constant is zonder te schokken, dat wil zeggen dat de machine logisch precies moet gaan terwijl de knop wordt ingedrukt, maar om een of andere reden gebeurt dit niet. Laten we het goed doen. Om te beginnen soldeerden de Chinezen de antenne aan de zender en niet aan de ontvanger. In feite heeft de antenne niet de vorm van een track op het bord:
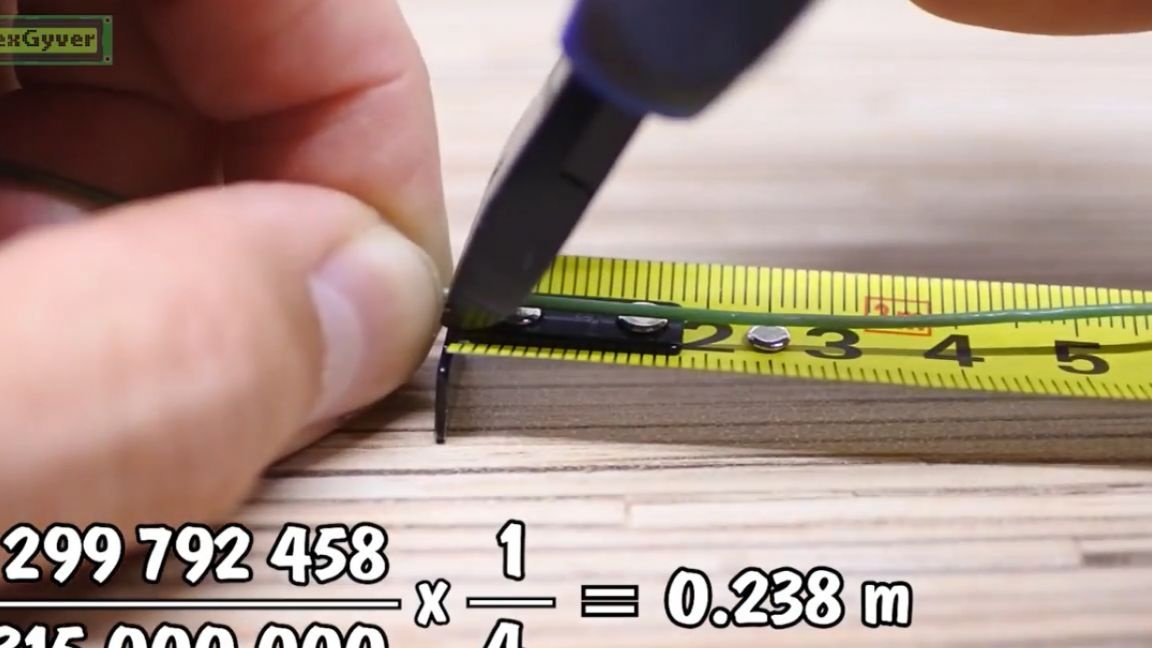
Maar de antenne is het geval als de grootte er toe doet. Laten we onze antenne maken. Hiervoor heeft u een gewone draad nodig, bijvoorbeeld van een internetkabel.

De antennelengte is meestal gelijk aan 1/4 van de golflengte, de zogenaamde kwartgolfvibrator. De radiofrequentie van de module is 315 MHz, we vertalen de frequentie in de golflengte volgens de schoolformule door de lichtsnelheid, delen door 4 en het blijkt 23 te zijn met een centimeter staart.
Hier trouwens een tablet van internet voor verschillende frequenties.
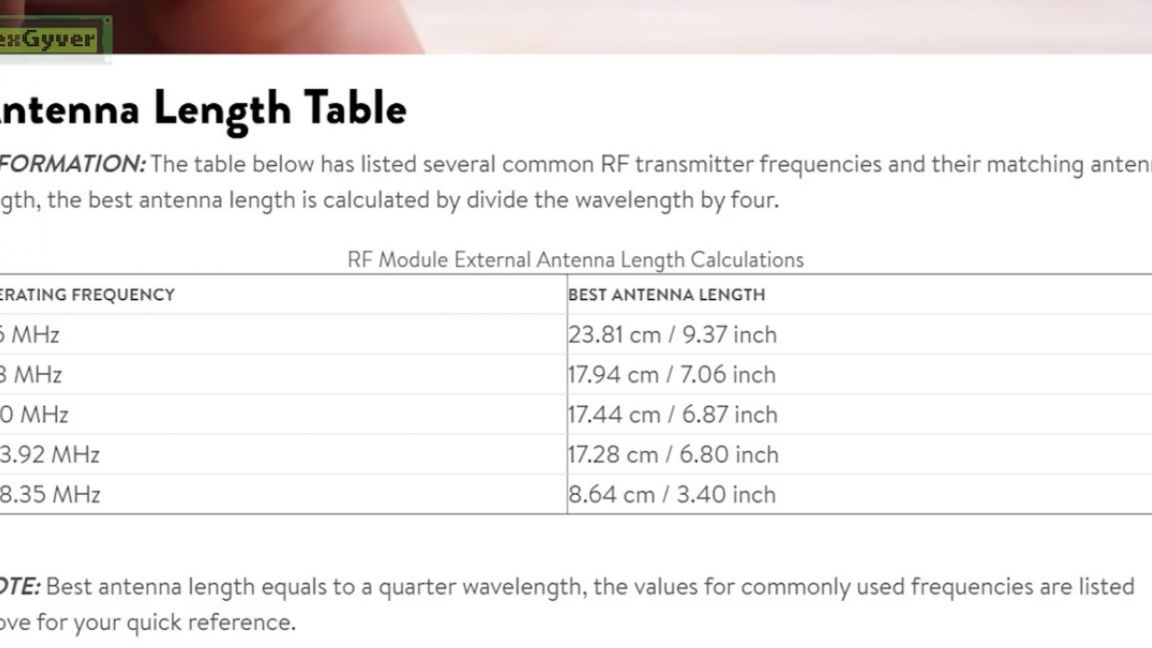
Zoals u kunt zien, doen we alles goed. Met zo'n antenne, de onze de robot Hij zal geen spion zijn, omdat hij een te lang reekleurig stuk draad uitsteekt.

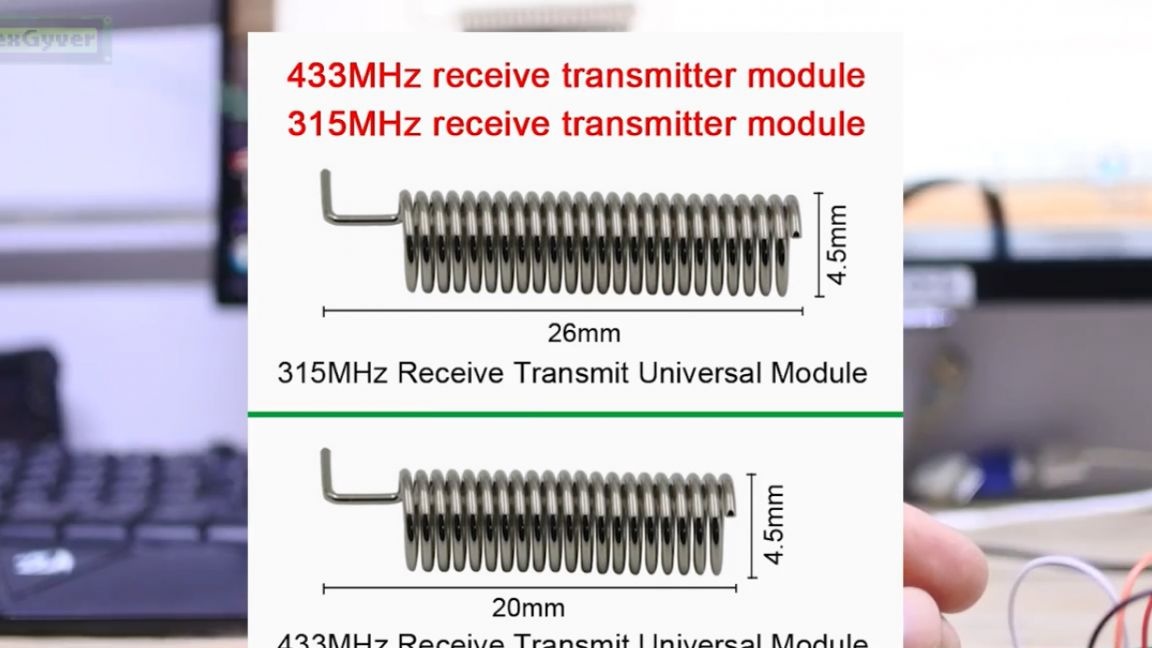
De antenne kan in een spiraal worden gedraaid. Te oordelen naar deze foto van internet, kun je hem 4 mm opwinden.
Neem een boor met de juiste diameter en wikkel onze antenne erop en soldeer deze vervolgens op het bord.
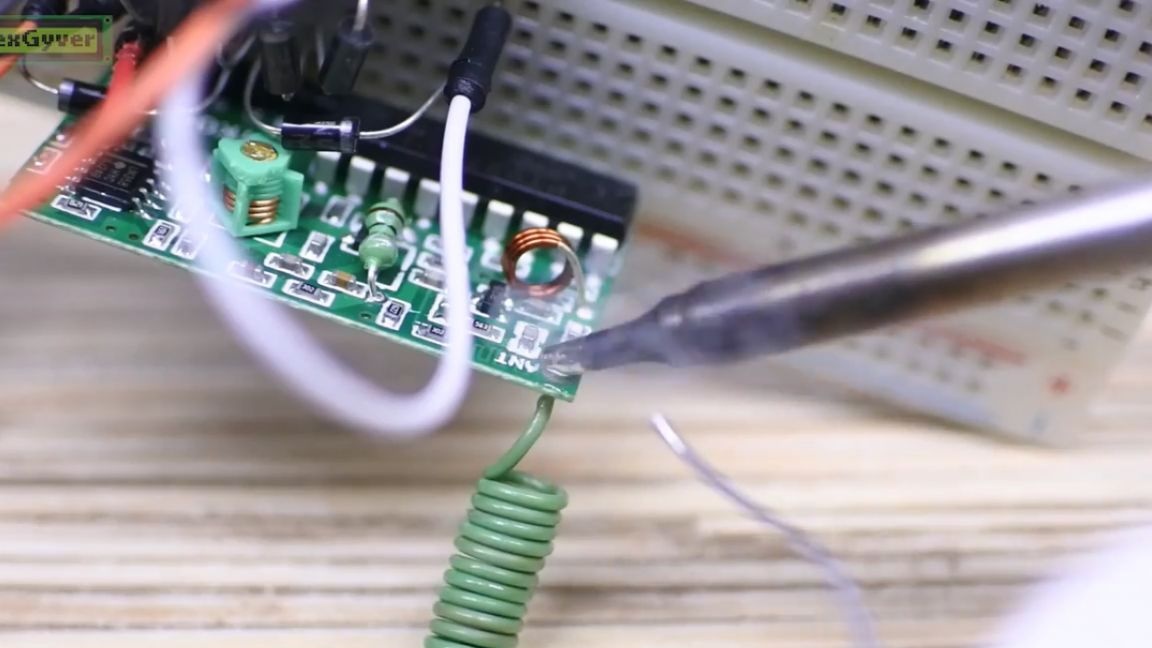
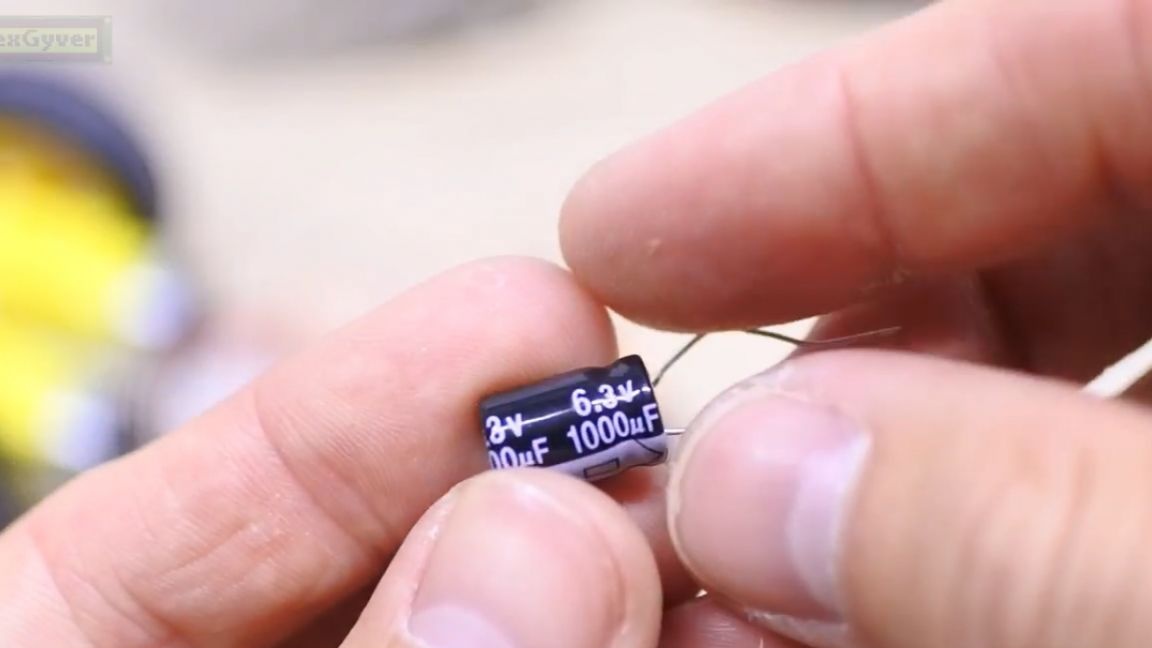
Om een hoge startstroom het hoofd te bieden, zal een condensator ons helpen parallel aan de voeding.
We controleren.
Dichtbij de antenne werkt het circuit stabiel. Waarschijnlijk zit het probleem nog steeds in de voeding, er is interferentie van de motoren, omdat bij een aparte voeding van de motoren en de ontvanger het circuit werkt zoals bedoeld.
Voeg elektrolytische en keramische condensatoren toe om de startschokken te verzachten.
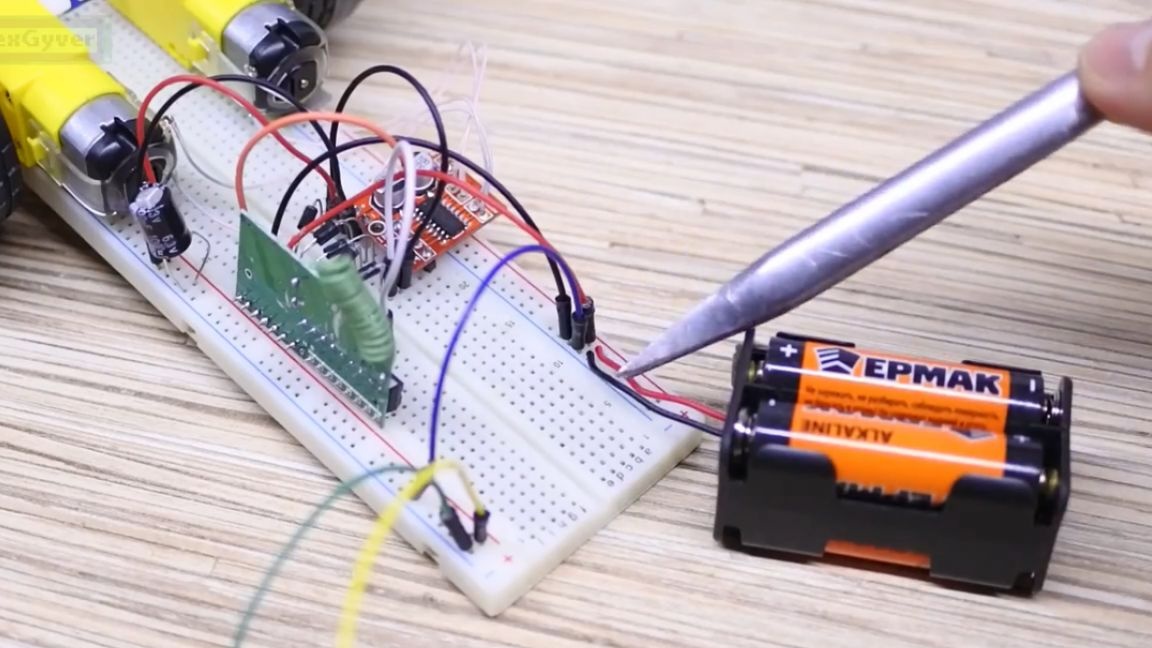
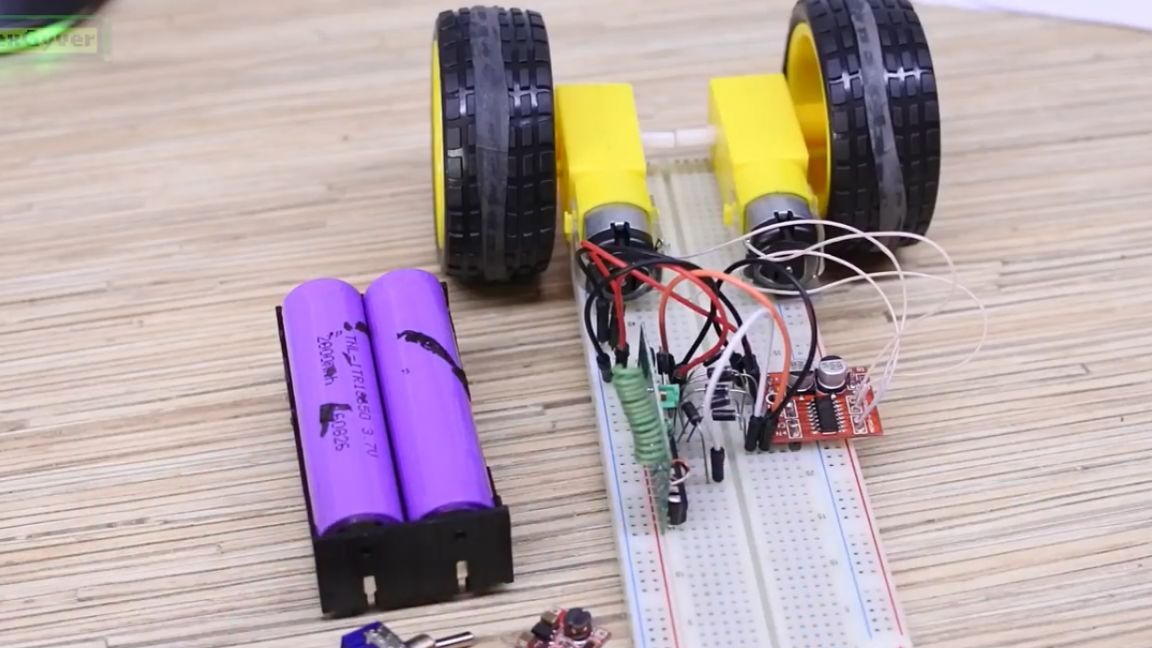
Maar toch gebeurde er niets. We zullen aparte maaltijden doen. Een lithium 18650-batterij aangedreven door motoren en een andere aangedreven door een radio. We zullen ook een boost-converter tot 5V plaatsen, omdat de radio vanaf 5V werkt, werkt de batterij niet meer. Neem een dubbele tuimelschakelaar om de stroom in te schakelen.
Al deze componenten worden verkocht op AliExpress. We bouwen het circuit snel opnieuw op en controleren het op prestaties.



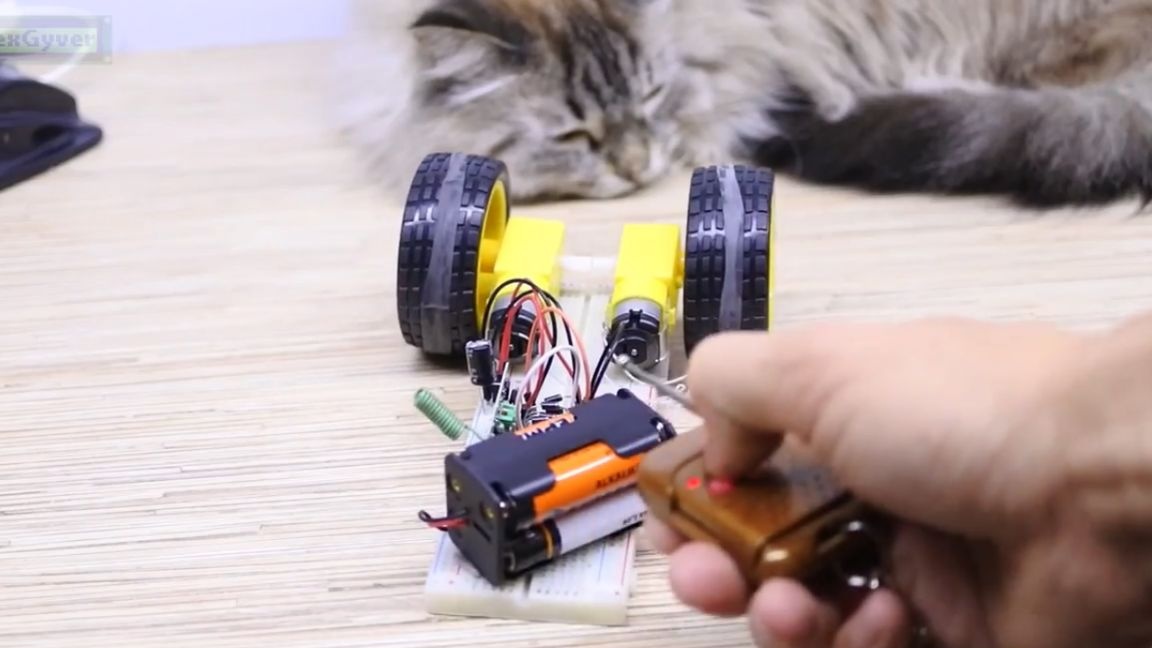
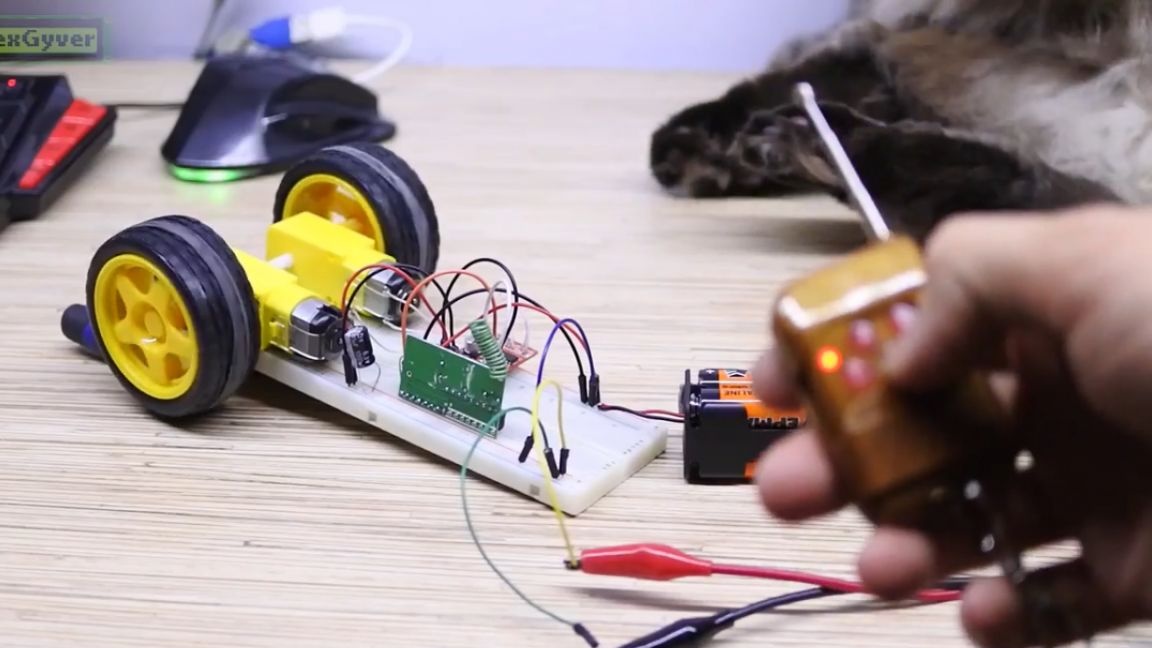
En verdomd, het werkt. Uw aandacht wordt gevestigd op de eenvoudigste en goedkoopste zelfgemaakte machine met afstandsbediening. Op de kracht van de radiomodule plaatste de auteur nog een paar condensatoren. Het werkt perfect.
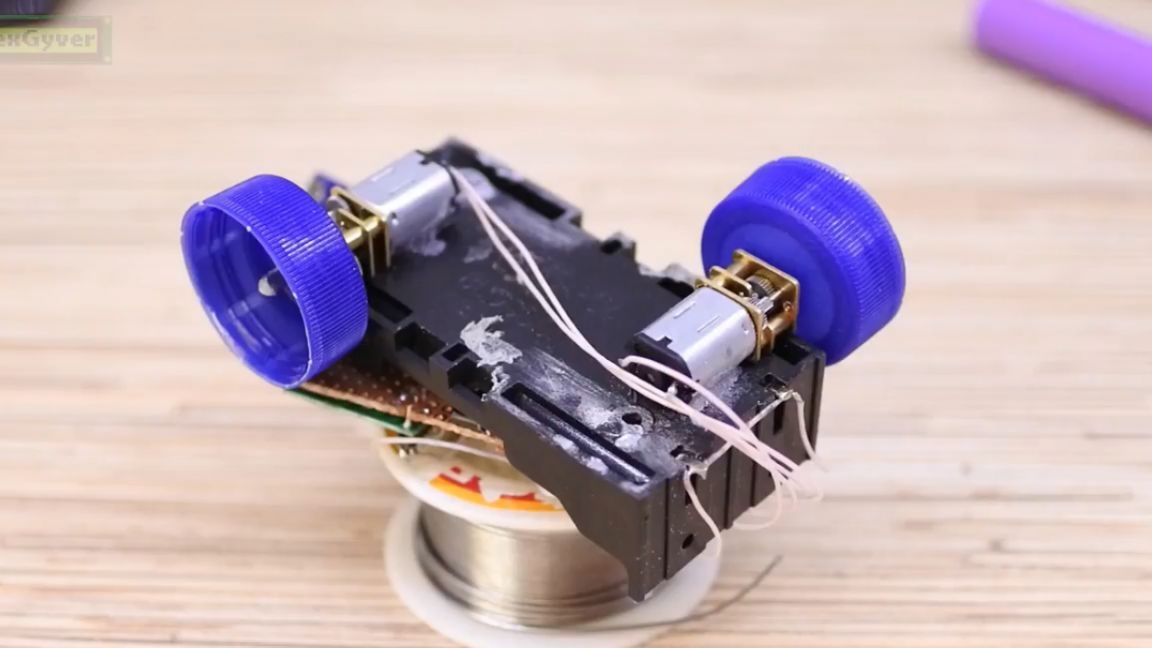
Onze robot wordt gebouwd op basis van het batterijcompartiment en kleine motoren. Het circuit is precies hetzelfde als voorheen, maar voor het gemak monteren we het op een breadboard.

Deze montage is in principe eenvoudig.
Neem vervolgens kleine motoren en lijm aan het batterijvak. Wij harden superlijm uit met gewoon zuiveringszout, het hardt direct uit en vormt een zeer duurzaam polymeer, dat zeer stevig hecht.

De wielen zijn gewone doppen.

We zullen de aandrijfwielen schuin maken, hij wordt compacter en de machine zal beter draaien, maar hindernissen overwinnen erger.
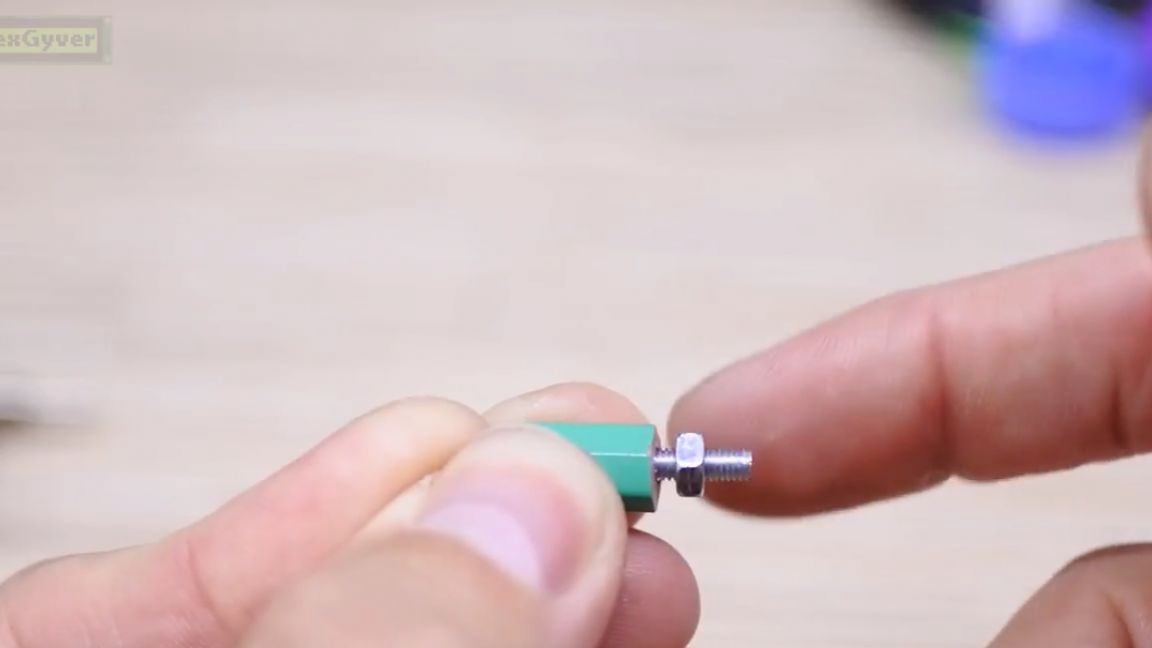
We hebben ook nog 2 wielen nodig die gewoon draaien. Bevestig ze in een mouw van een potlood, het past goed in maat. De as komt uit de m3-schroef, dus we boren een gat van 3 mm, monteren en lijmen het op superlijm.

Zorg ervoor dat je banden maakt van een fietscamera, anders gaat hij niet. We plaatsen alleen rubber op de aandrijfwielen, anders gaat het misschien niet meer.

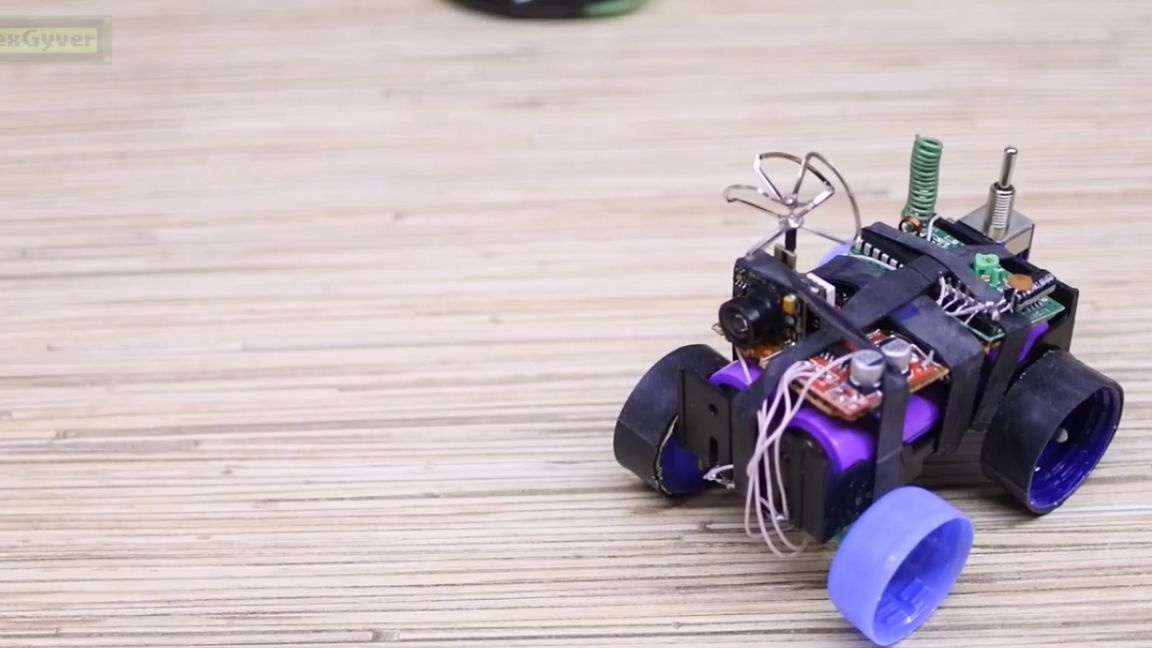
Hoe gaat het met onze mini-spionagemachine zonder minicamera. De auteur nam een minicamera voor een quadrocopter en Eachine tx-02 3 in 1 (camera + zender + antenne).
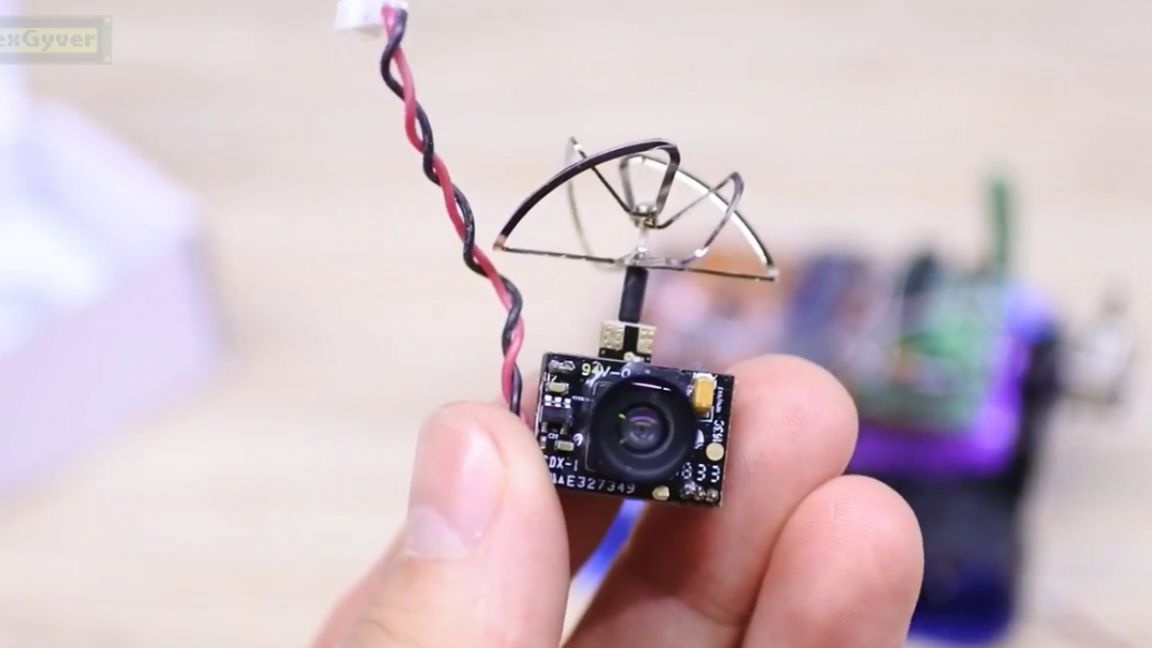
De camera wordt gevoed door een spanning van 3 tot 5V en stuurt een videosignaal met een frequentie van 5,8 GHz. We voeden het met de batterij van waaruit de ontvanger van de afstandsbediening wordt gevoed.
De motoren storen dus het videosignaal niet. Bevestig aan dubbelzijdige tape en rubberen band.

Je kunt video ontvangen op verschillende Chinese apparaten. Er is zo'n cool scherm met een ingebouwde ontvanger en een ingebouwde batterij, je kunt er ook een geheugenkaart in plaatsen en erop opnemen wat de camera meeneemt.
De auteur heeft er helaas geen, maar het ding is echt cool en comfortabel. De tweede optie is iets kleiner, maar precies wat u nodig heeft voor onze spionwagen is direct.


Dit is een klein scherm met een ontvanger en batterij, en niet alleen een scherm, maar een horloge met een 2-inch scherm. Videolink-kanaaltabellen zijn gecodeerd in vier letters en acht cijfers.
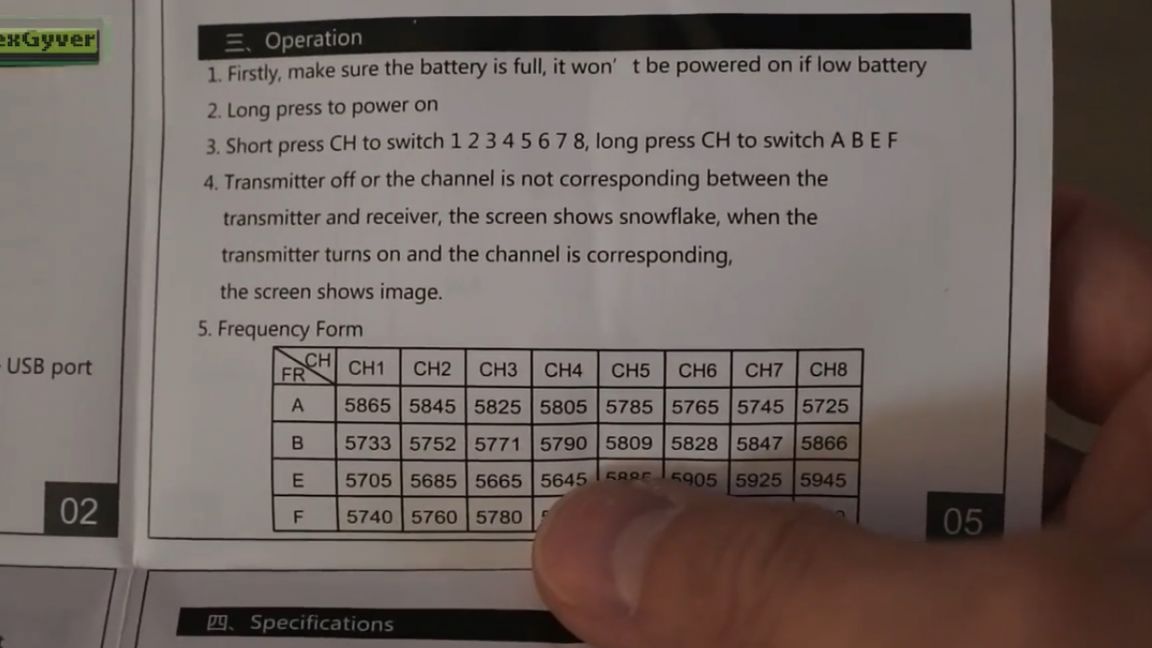
Het kanaal moet overeenkomen op de zender en op de ontvanger.Op de zender hebben we een kanaal met het nummer A8, je kunt de knop wijzigen.

En het horloge heeft een schaal. Door op de knop te klikken en deze ingedrukt te houden, kunt u het kanaalnummer A8 instellen.

Alles, er is een contact. U kunt met bewaking beginnen.

De derde optie, in principe de goedkoopste, is zo'n ontvanger voor een smartphone, een speciaal programma downloaden, openen, verbinden, inschakelen, de videozender inschakelen, de knop op de ontvanger ingedrukt houden en het scannen begint.


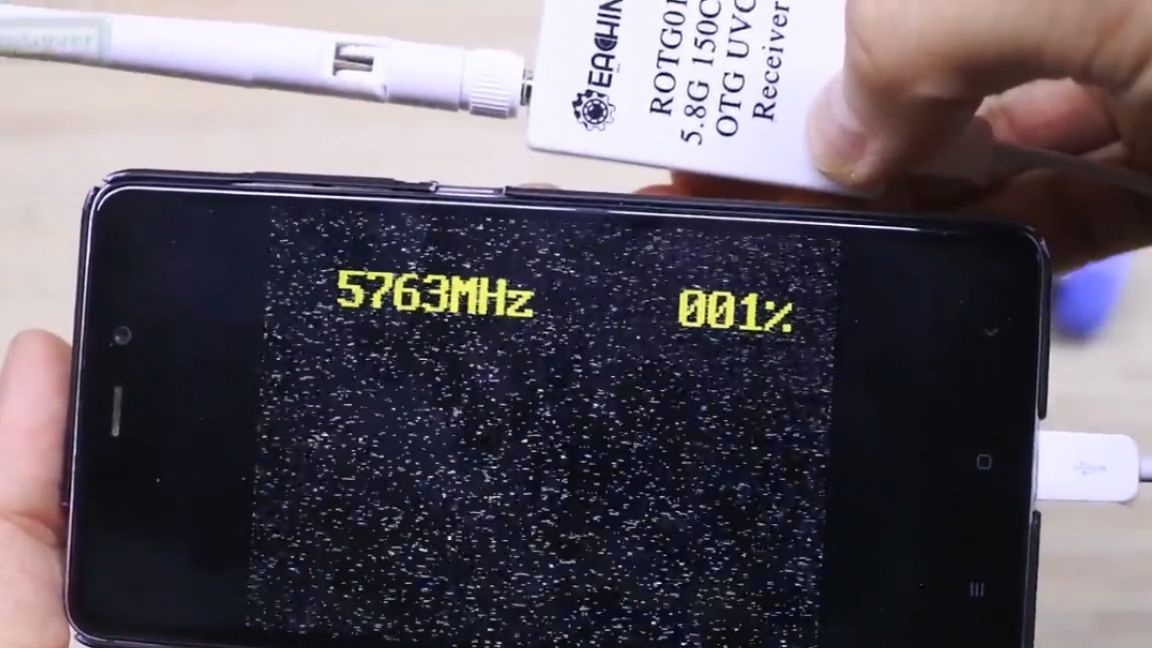
Daarna wordt automatisch de beste frequentie geselecteerd en kunt u werken met ons videobewakingssysteem.



Het coolste is dat je video rechtstreeks in het geheugen van de telefoon kunt opnemen.

Dat is alles voor vandaag. Bedankt voor je aandacht. Tot binnenkort!
Video: