Vandaag wil ik mijn volgende delen zelfgemaakt. Het is gebaseerd op Lego en Arduino. Voor de bediening gebruiken we een afstandsbediening met een 433 MHz zender. Deze keer wilde ik een race maken een auto. Ga verder:
- Lego Technic 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- 433 MHz radiocommunicatiemodule
- Motorreductor 200 tpm, met een asdiameter van 3 mm
- 2 leds
- 2 weerstanden 150 ohm
- Condensator 10v 1000uF
- 2 kammen met één rij PLS-40
- 2 PBS-20-connectoren
- Inductor 68mkGn
- 6 NI-Mn 1.2v 1000mA-batterijen
- Connector vader-moeder twee pin naar draad
- Homutik
- Draden van verschillende kleuren
- soldeer
- Hars
- soldeerbout
- Bouten 3x40 en moeren en ringen voor hen
- Bouten 3x20
Stap 1 monteer de koffer.
Het is noodzakelijk om onze machine te monteren volgens Lego-instructies 42022, de tweede optie met enige verfijning. We voeren alle acties uit van pagina 3 tot 6. We hebben geen versnellingsmechanisme nodig. De Lego-motor hoeft ook niet te worden gemonteerd. U heeft echter motorsteunen nodig die zijn verzameld op pagina's 14-19, behalve tandwielen en assen. Vervolgens verzamelen we alles van pagina's 20 tot 74, behalve de hendel op pagina 25.
Stap 2 mechaniseer het lichaam.
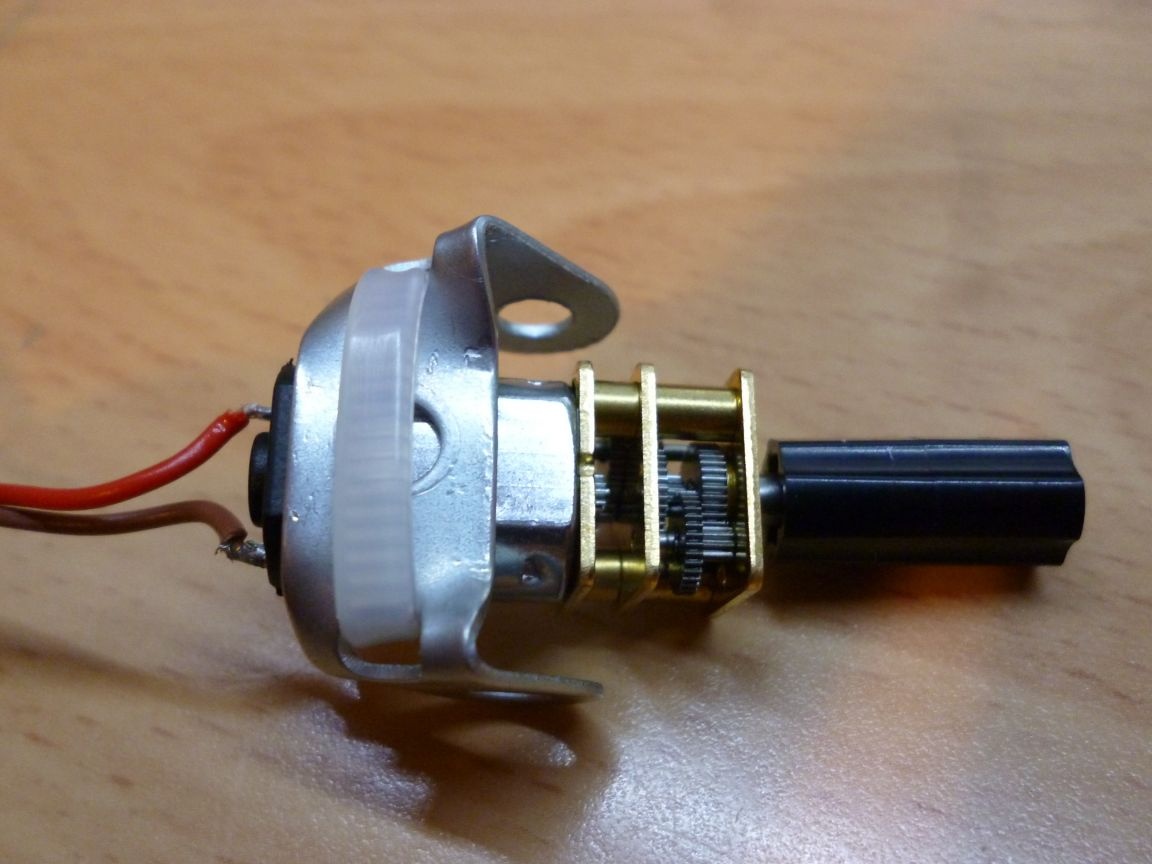
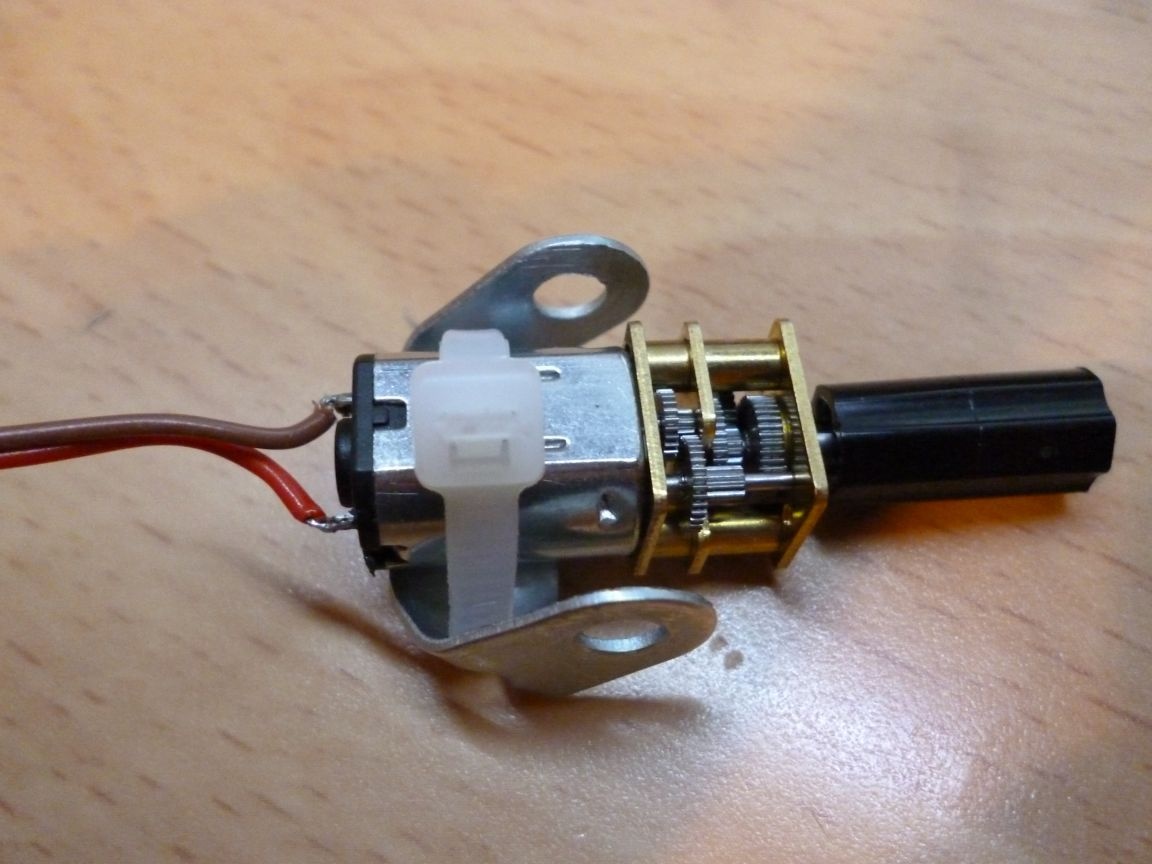
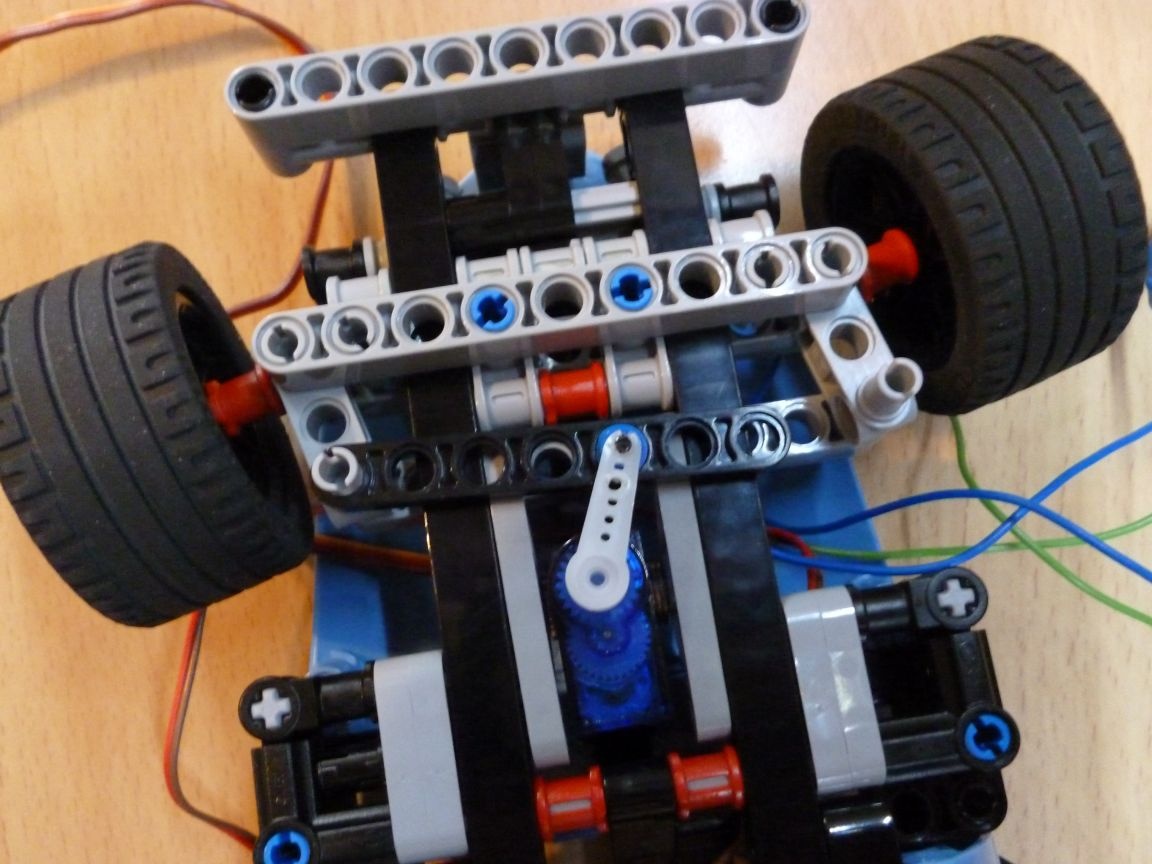
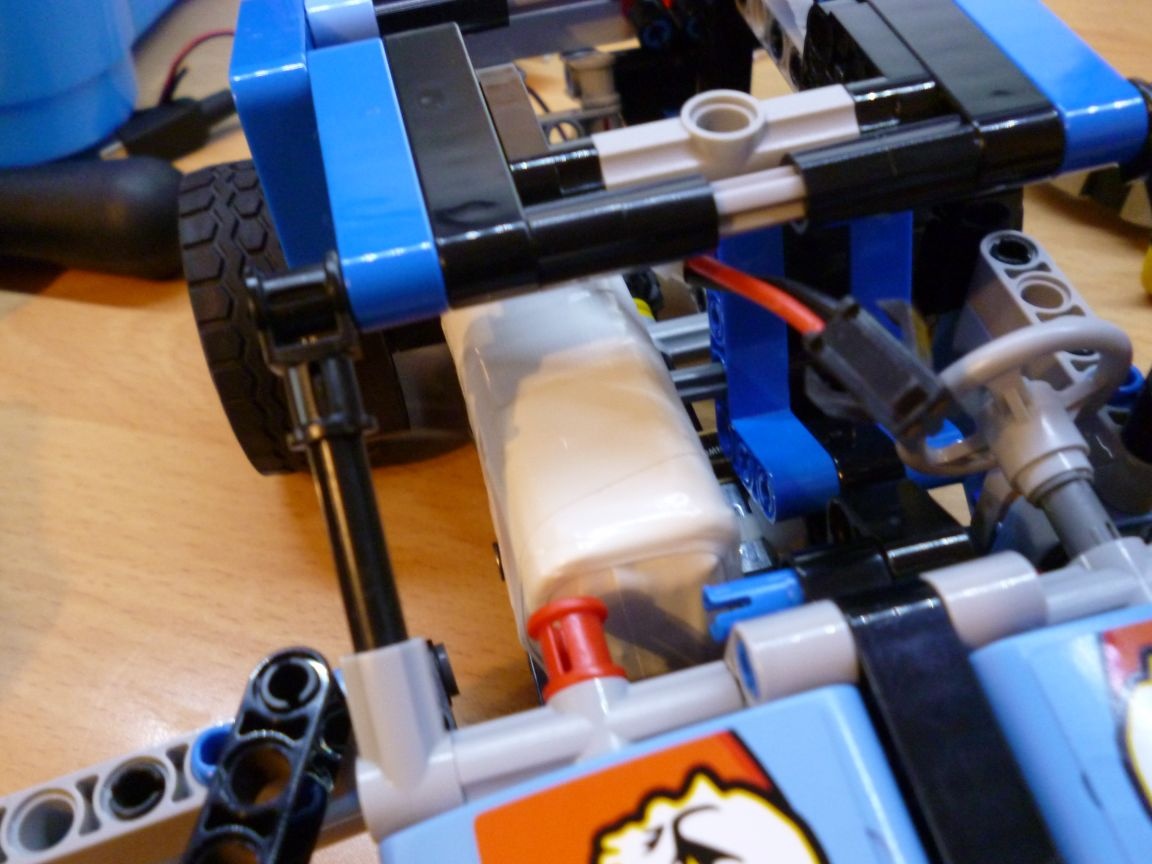
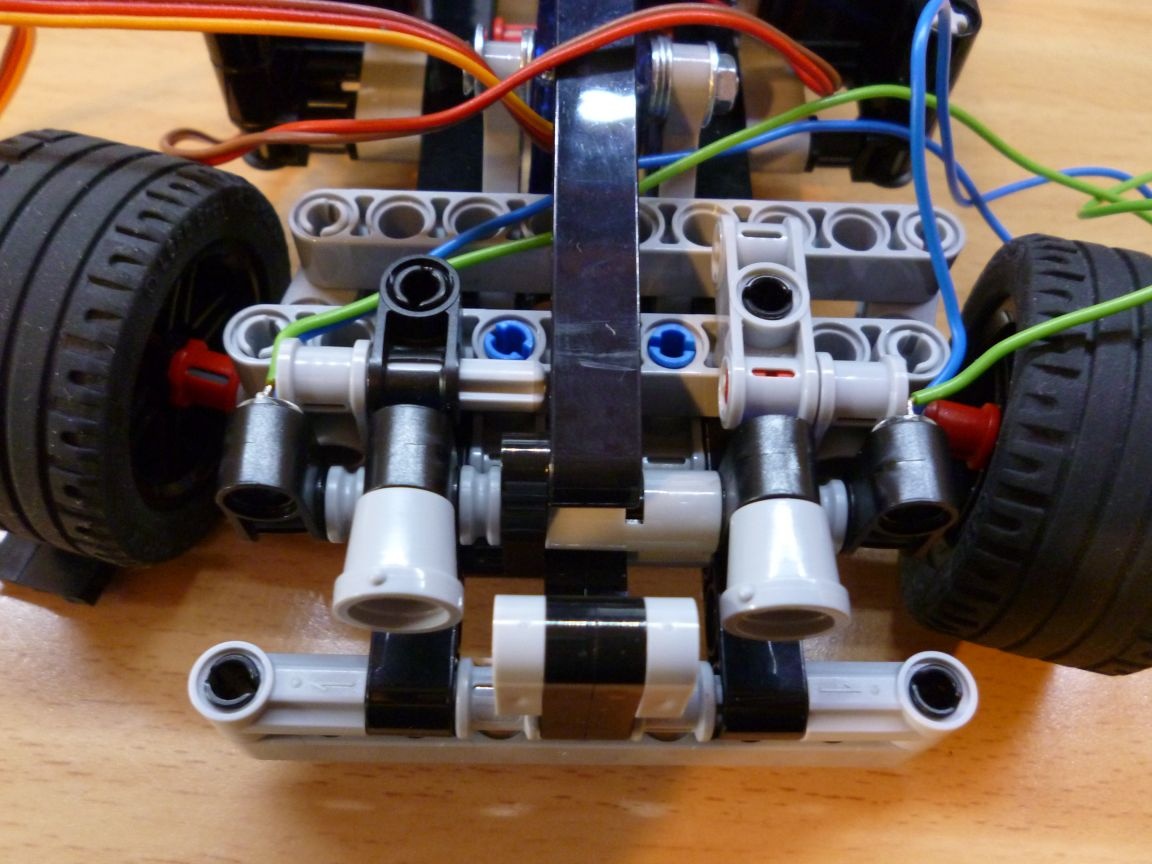
Zet ons in beweging het model er komt een reductiemotor met een toerental van 200 tpm. Kan worden gebruikt met een andere overbrengingsverhouding. Maar naar mijn mening is dit de beste optie. Bij 100 tpm - te langzaam, 300 tpm - is er onvoldoende vermogen en is de motor erg heet. Zet op de as van de reductiemotor de "Legovskaya" -verbindingsmof en beveilig deze tegen verdraaien van de lucifer met een rand. Om onze motor op het model te bevestigen, is het noodzakelijk om het onderdeel van de metalen constructor te buigen met de letter "P" en de reductiemotor met een klem op de plaat te bevestigen. Het resultaat zou het volgende moeten zijn:
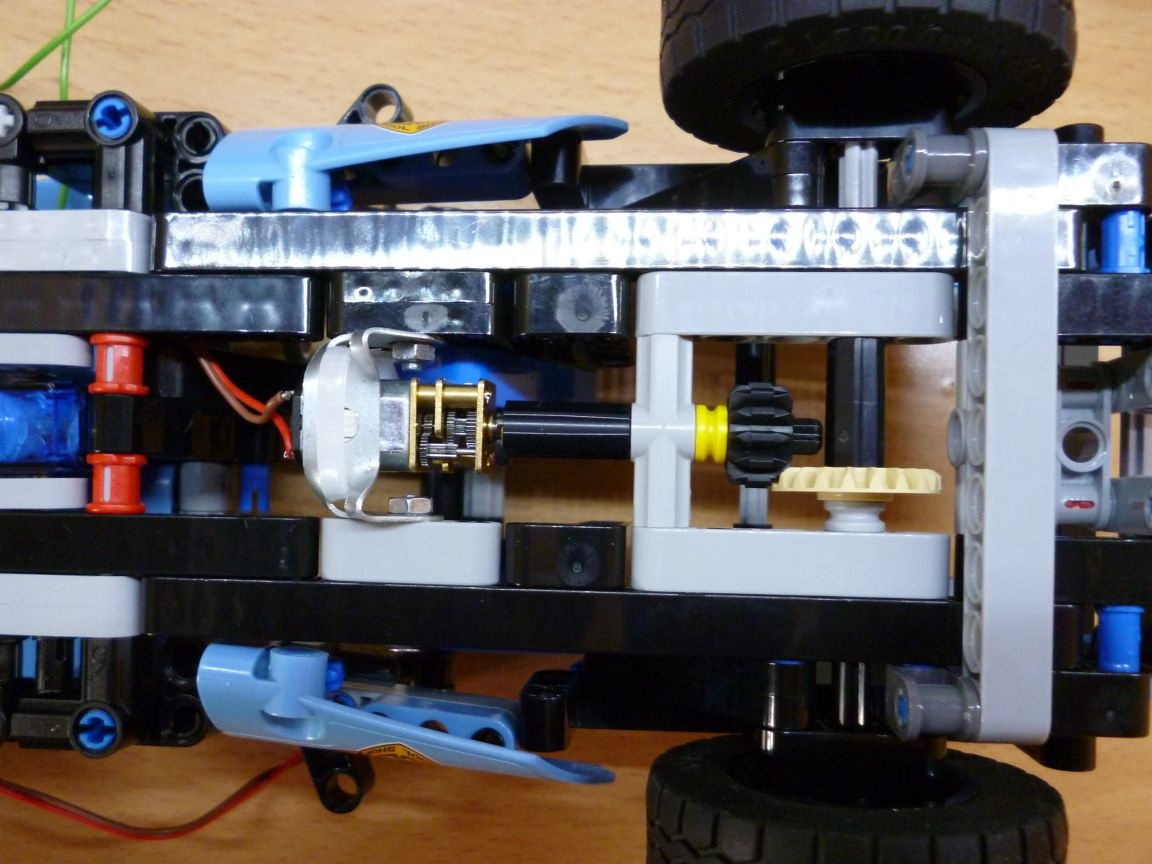
Met behulp van 3x20 bouten bevestigen we onze motor aan het model. Draai niet teveel vast! Anders kunt u Lego-constructoronderdelen beschadigen. Op het model ziet het er als volgt uit:
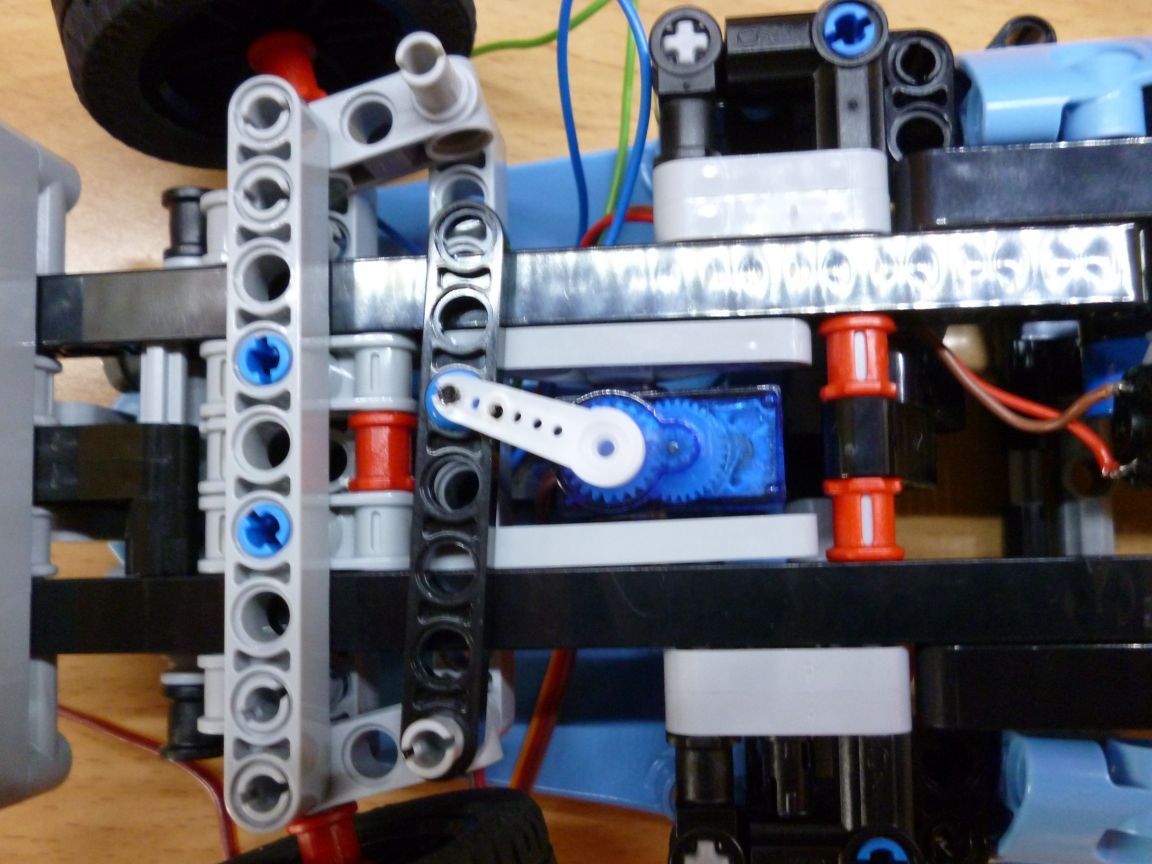
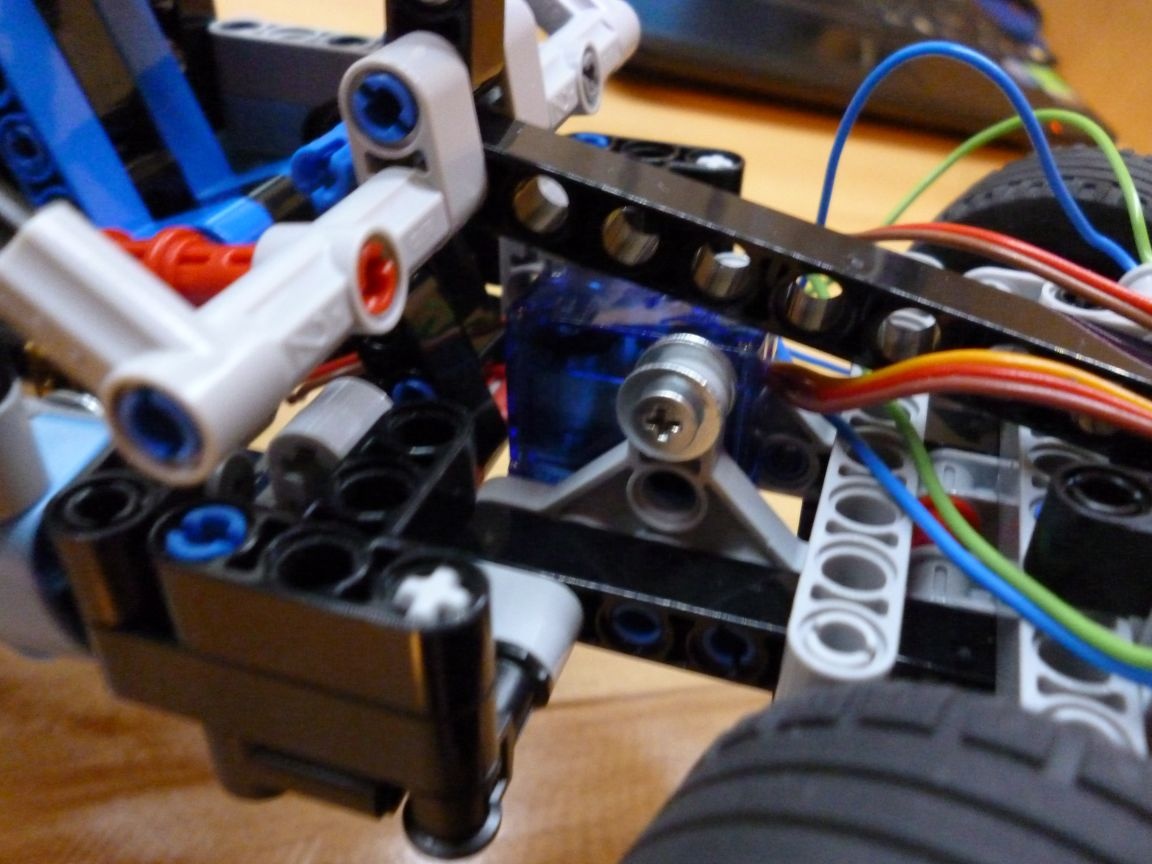
Om de bocht te maken, neem een licht gewijzigde servo SG-90. De koffer moet zorgvuldig worden geboord om de interne delen, het doorlopende gat met een diameter van 3,2 mm niet te raken of eenvoudig te snijden met een briefpapiermes.

We steken een bout in het gemaakte gat en op de randen plaatsen we driehoekige platen en fixeren we met moeren. We zetten de hendel op de servo-as en bevestigen het onderdeel aan de Lego-hendel. Op een typemachine ziet het er als volgt uit:
Stap 3 is een elektricien.
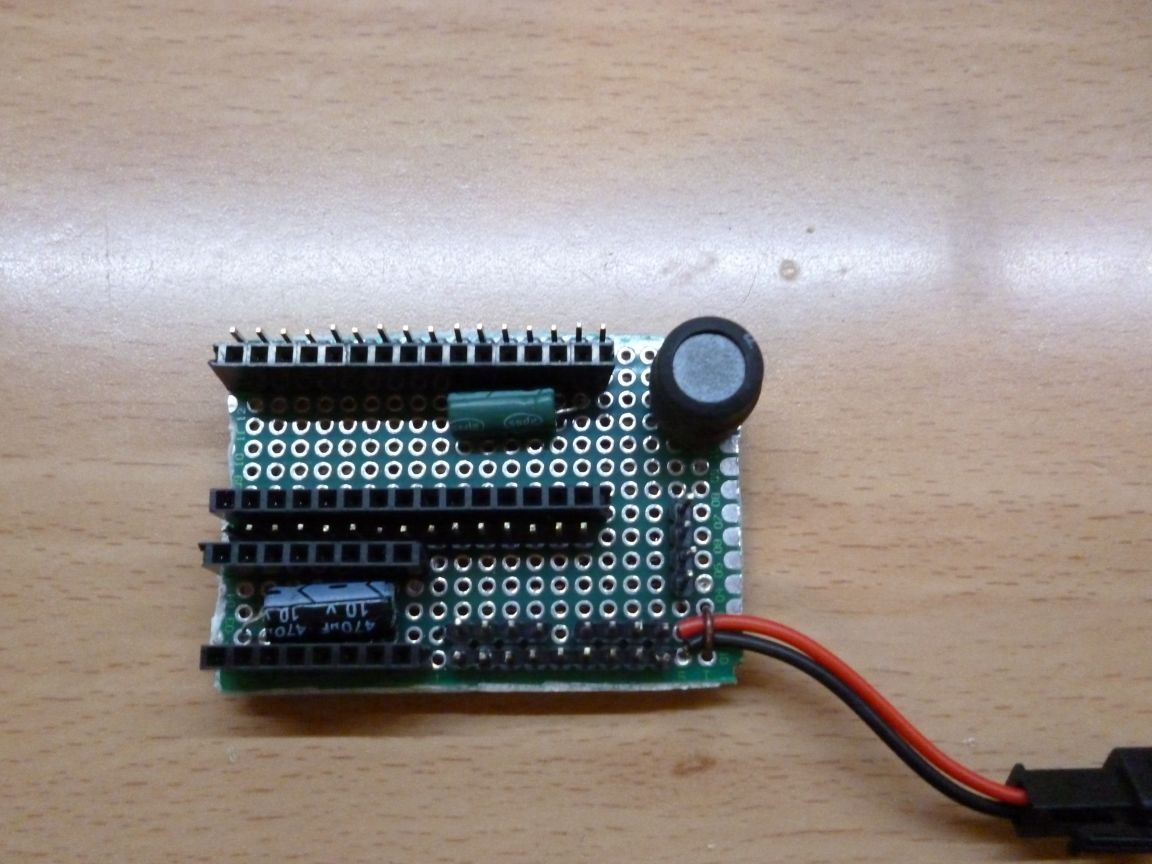
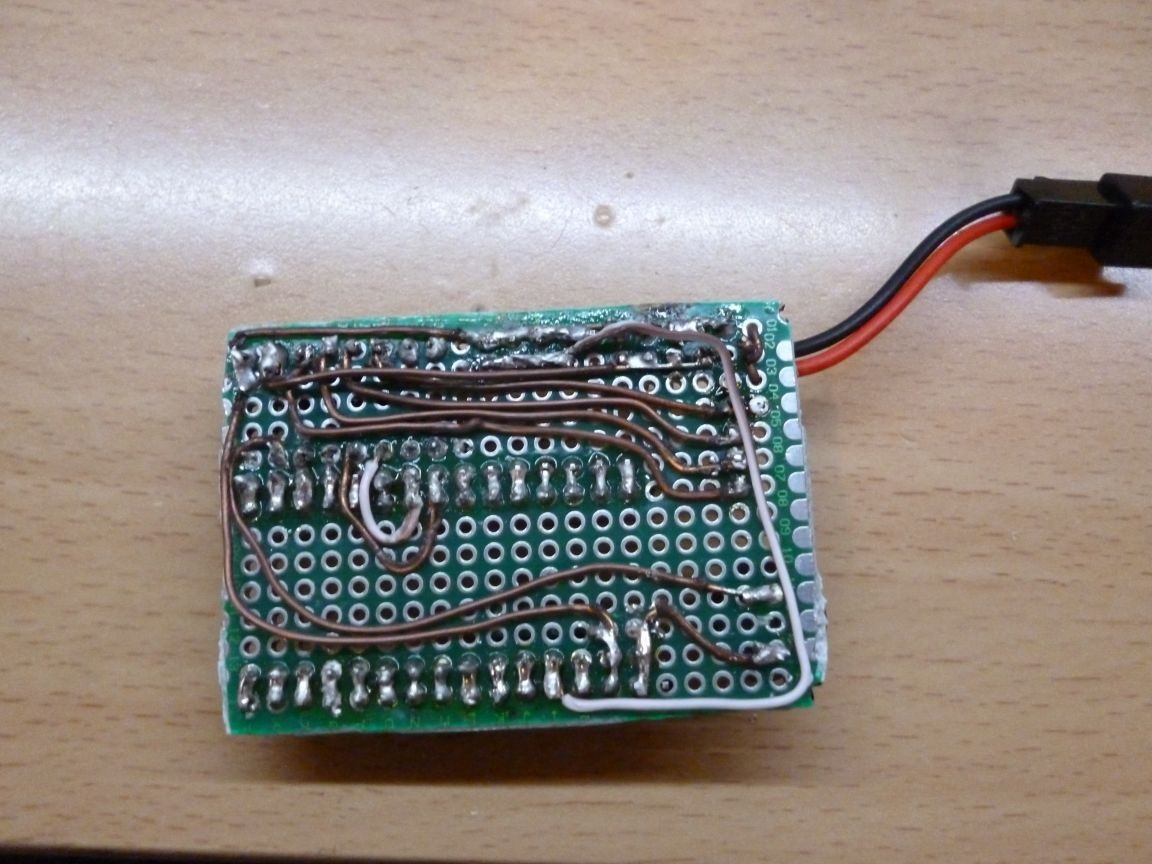
Soldeerbout in de hand en klaar. Alle elektriciteit kan eenvoudig worden gemonteerd door de montagedraden aan te sluiten. Maar dit is lastig, omdat het veel ruimte in beslag neemt. Daarnaast is er een grote kans op slecht contact. Daarom is het beter om alles op de printplaat te solderen volgens het volgende schema:
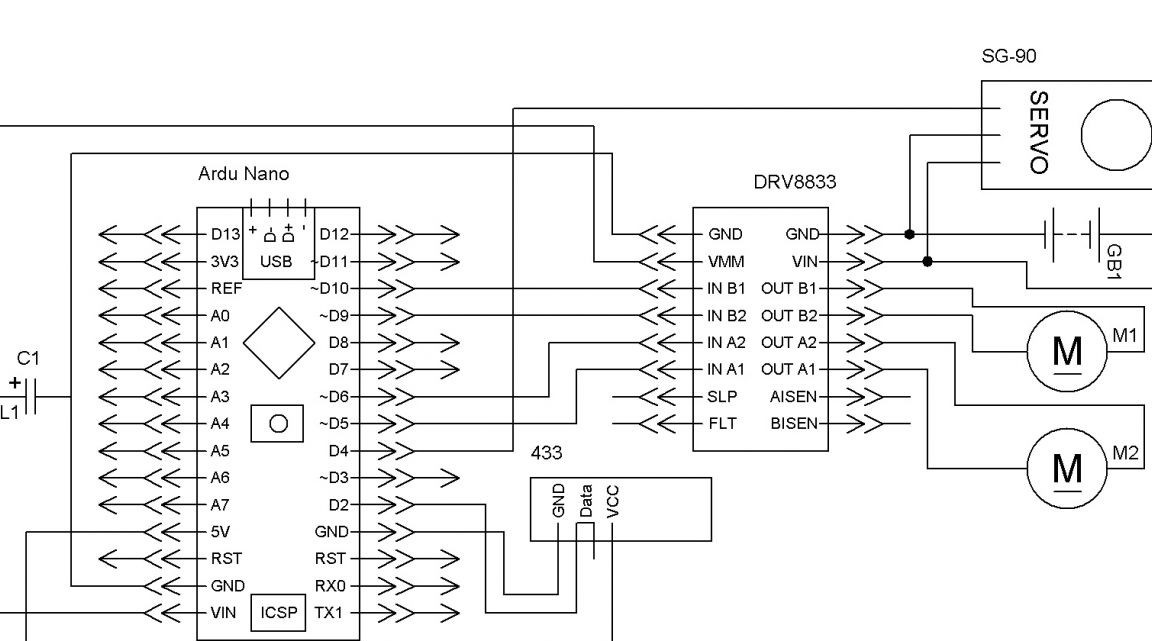
Ik zal een beetje duidelijkheid brengen: je kunt elke condensator met laag vermogen nemen, je kunt ook een soort inductor vinden, dit is nodig om de spanning van de microcontroller te stabiliseren. De antenne moet aan de ontvanger worden gesoldeerd. Ik heb het volgende:
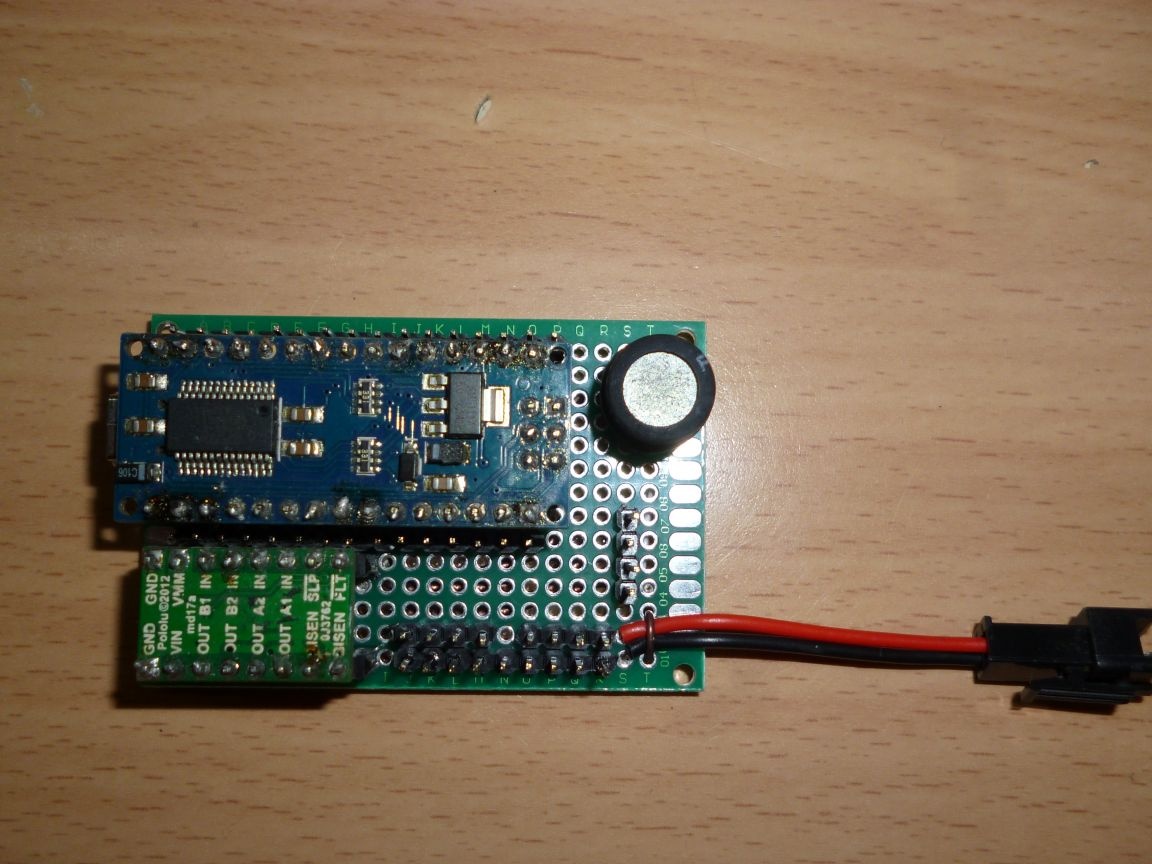
We hebben Arduino Nano en DRV 8833 op hun plaats gezet:
Voor de voeding gebruiken we 6 Ni-Mn 1.2v 1000mA-batterijen, in serie gesoldeerd en met elektrische tape gewikkeld. Lijm ze op een dubbelzijdig plakband passagierszitje.

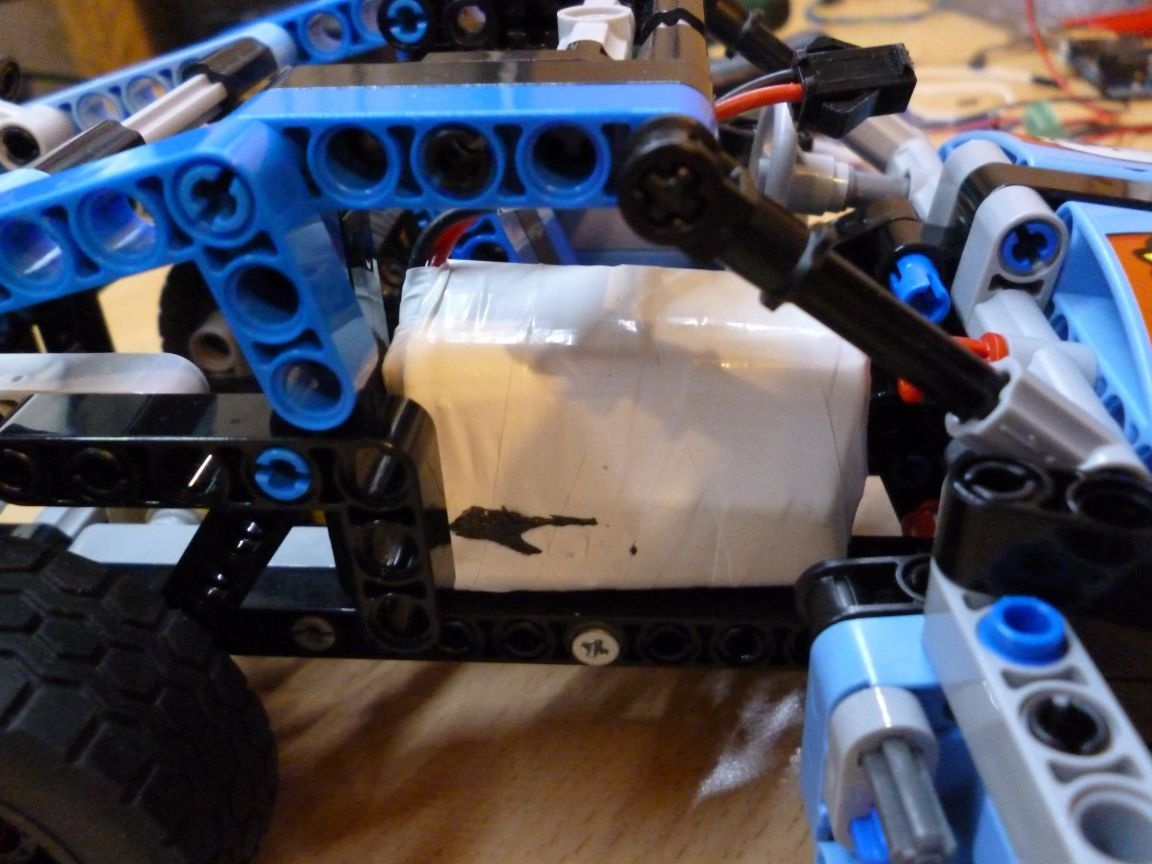
We verbinden alles volgens het schema en installeren aan de achterkant van de machine. Je kunt ook een paar LED's toevoegen. Plaats ze in de koplampen en sluit ze aan op pin 14 (A2).
Stap 4 firmware.
Om de firmware te schrijven, heb ik de Arduino IDE gebruikt. De huidige versie op het moment van schrijven is 1.8.1. Het is handig om het communicatieprotocol te implementeren met de 433 MHz-module met behulp van de rc-switch-2.52-bibliotheek. Je moet het downloaden en toevoegen aan de map "libraries" van de Arduino IDE.
We verbinden de Arduino en flashen deze met de volgende firmware:
Om de prestaties van ons model te testen, hebben we een tweede Arduino-bord nodig. Het is noodzakelijk om een 433 MHz radiozender aan te sluiten op het tweede bord. De zender wordt als volgt aangesloten:
VCC (zender) tot 5+ (Arduino),
GND naar GND,
DATA naar D10.
Schrijf daar de gewijzigde SendDemo-schets. Het staat in de voorbeelden in de bibliotheek die we hebben geïnstalleerd en dient om opdrachten te verzenden. Voordat u de schets flitst, moet u deze een beetje wijzigen, namelijk de verzonden opdrachten wijzigen. Afhankelijk van wat u moet controleren, schrijft u de volgende opdrachten naar de verzendregel:
"1" - voorwaartse beweging (schrijf een commando zonder aanhalingstekens!)
"2" - achterwaartse beweging
"15" - punt
"3" - draai het stuur naar links
"4" - draai het stuur naar rechts
"5" - zet het stuur in het midden
"10" - zet de koplampen aan
"11" - zet de koplampen uit
Het maken van een afstandsbediening met een 433 MHz radiozender is een onderwerp voor een apart artikel. Ik zal zeker de instructies schrijven voor het maken van zo'n afstandsbediening.
Ik wil zeggen dat deze optie geschikt is voor bijna elk model Lego-auto's. Het volstaat om alle mechanica met elkaar te verbinden en een plaats voor het bord te vinden. En als je fantasie opneemt, kun je elk model mechaniseren.