


Dus lego nemen van mijn zoon en thuis Arduino Nano begon deze ontwerpers te combineren.
We hebben nodig:
- Lego Technic (kits 42029 en 42033)
- Arduino Nano (link naar het bord)
- DRV 8833
- 2 servo drives SG-90
- IR-ontvanger
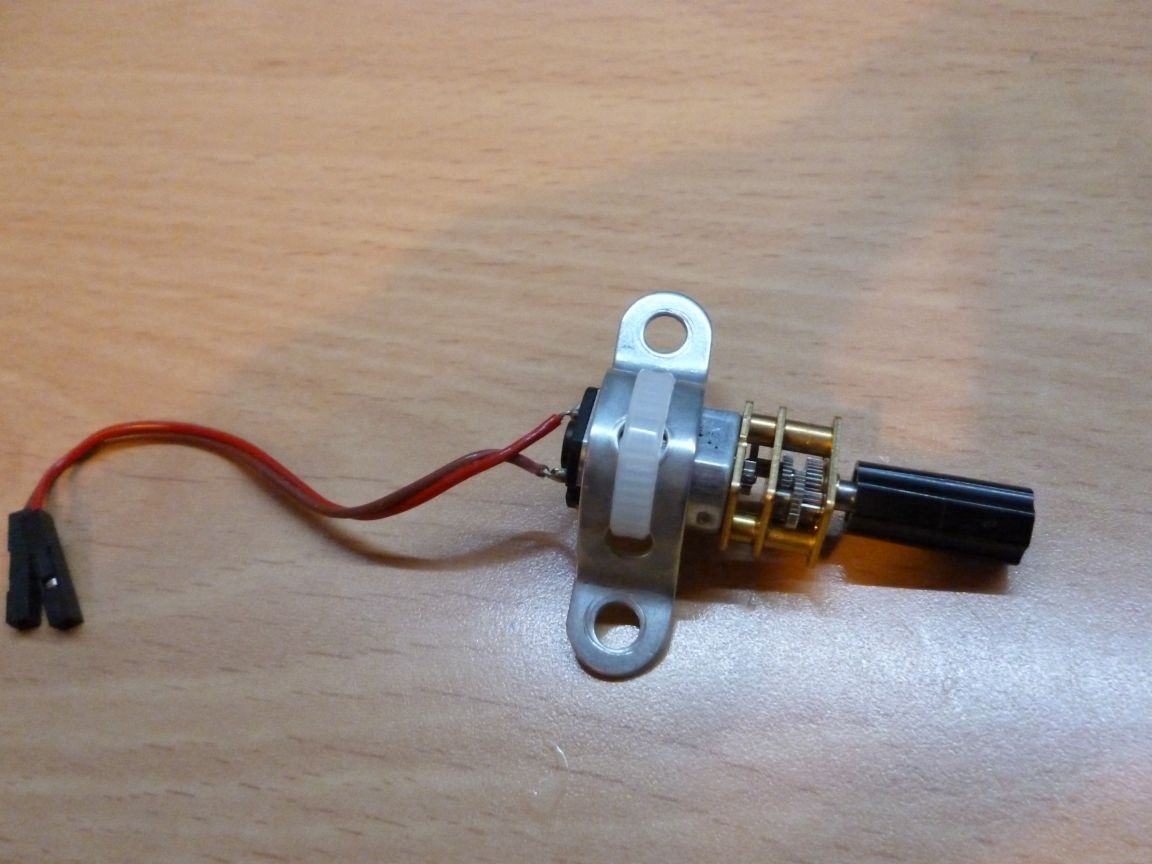
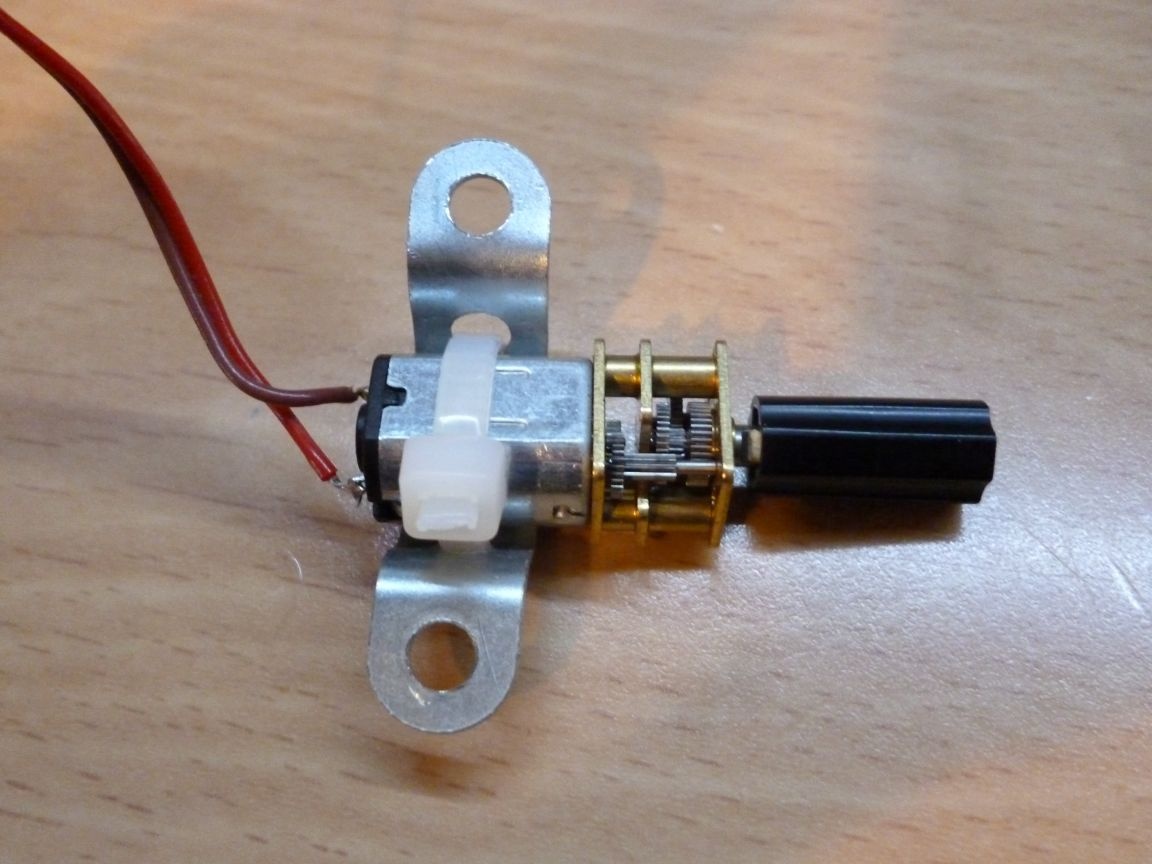
- reductiemotor
- 2 leds
- 2 weerstanden 150 ohm
- Condensator 10v 1000uF
- 2 kammen met één rij PLS-40
- 2 PBS-20-connectoren
- Inductor 68mkGn
- 4 NI-Mn 1.2v 1000mA-batterijen
- Connector vader-moeder twee pin naar draad
- Homutik
- Draden van verschillende kleuren
- soldeer
- Hars
- soldeerbout
- Bouten 3x40 en moeren en ringen voor hen
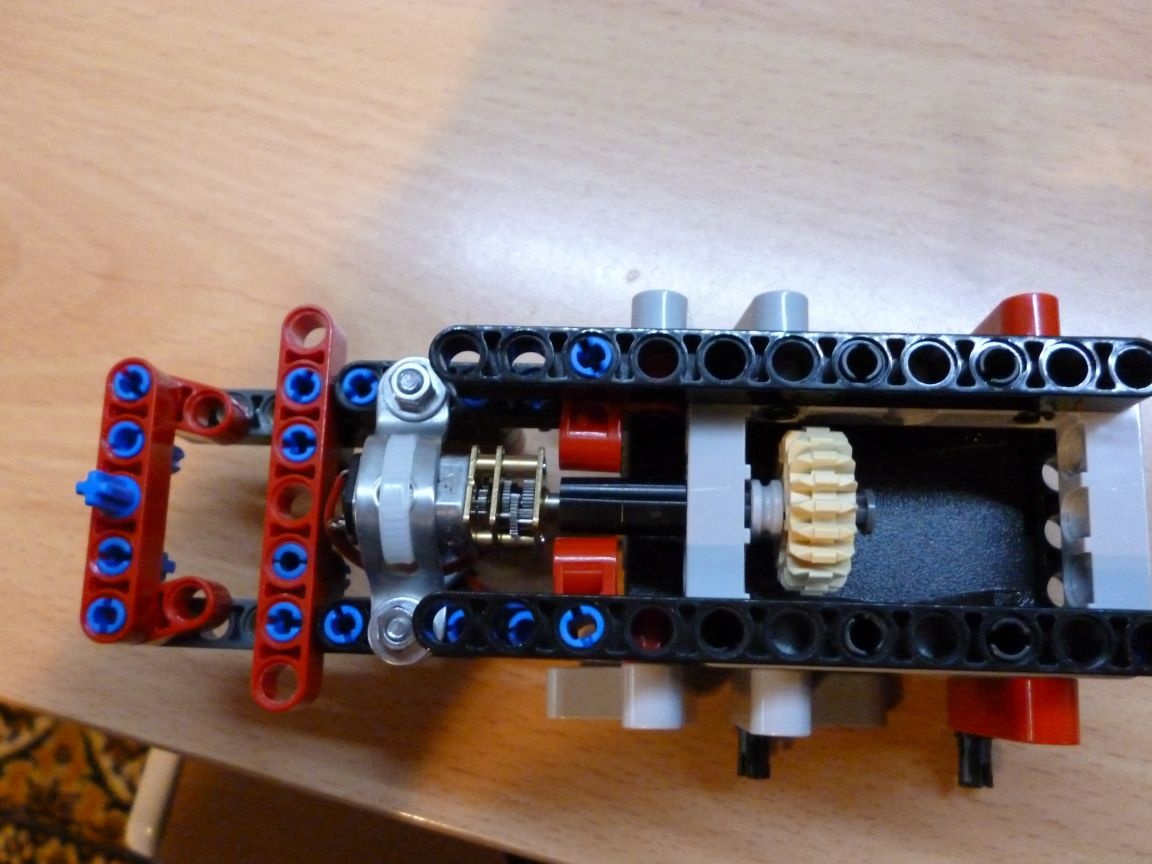
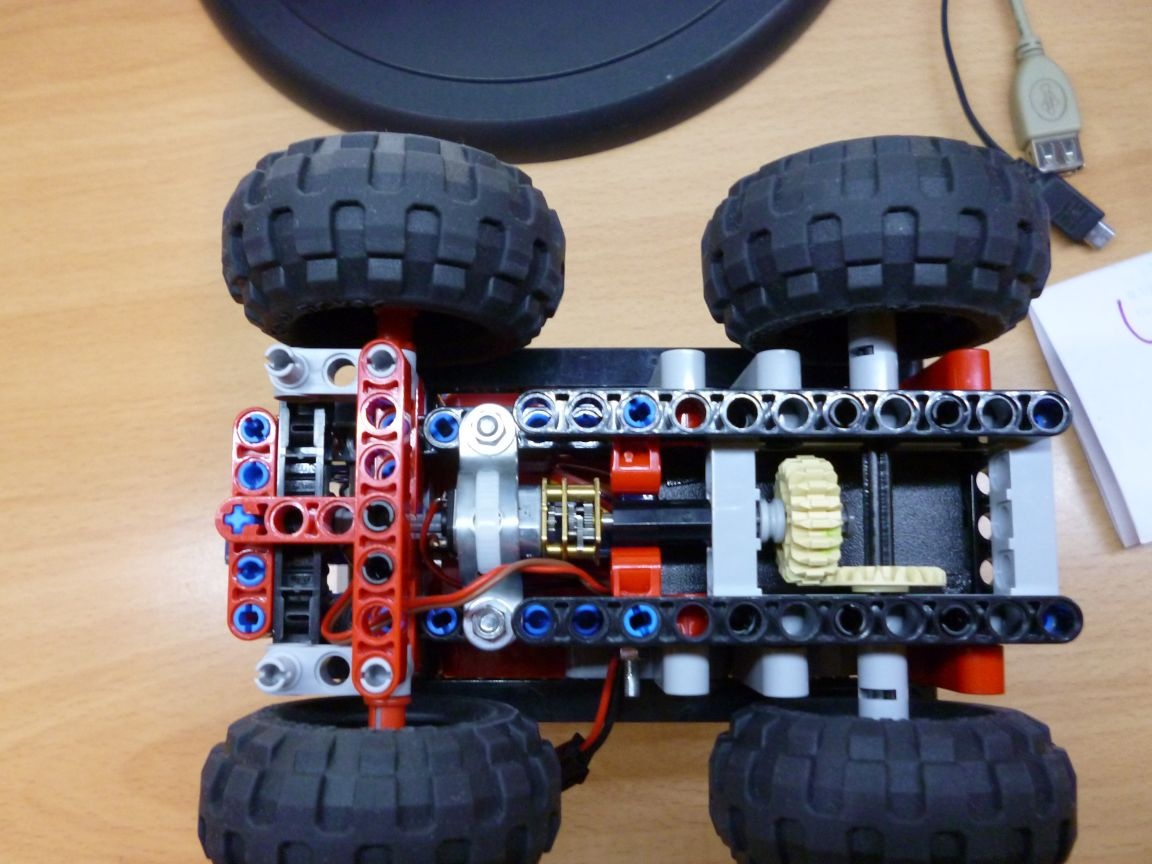
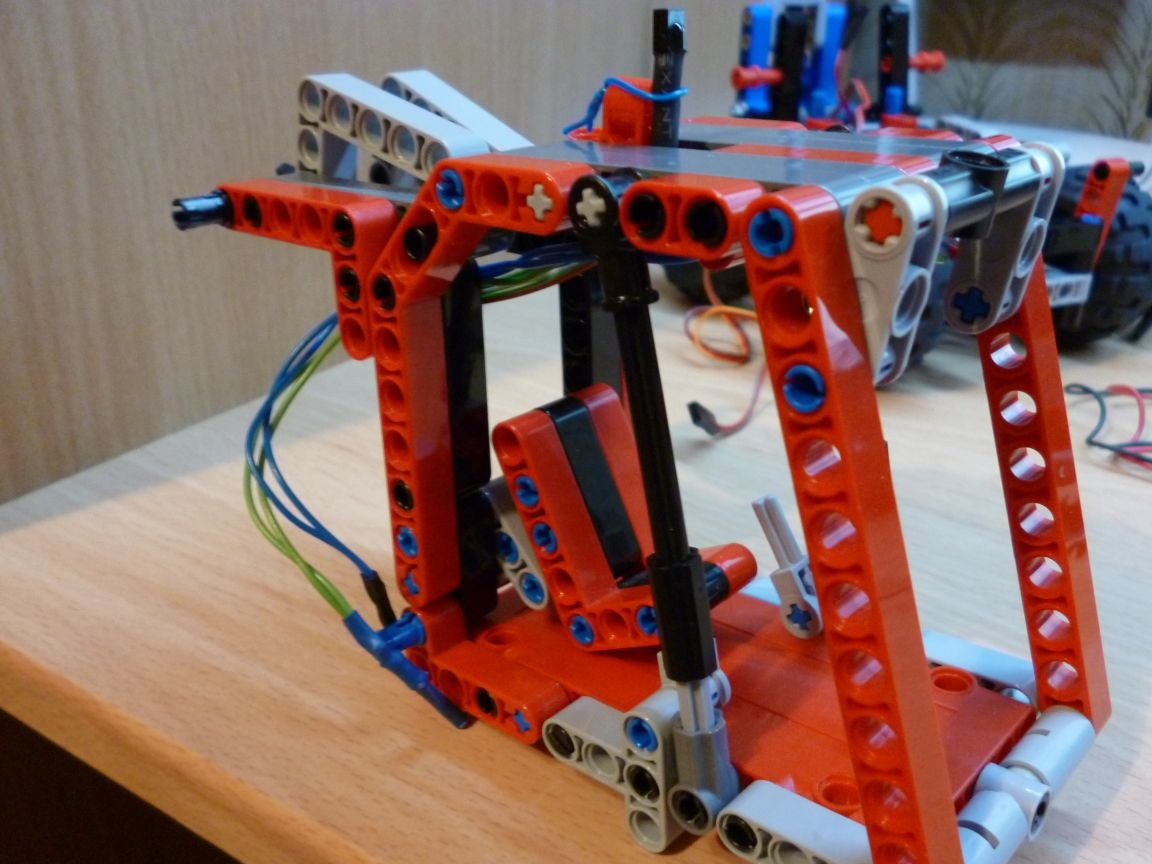
Stap 1 monteer het chassis en de aandrijfas.
Je kunt elk chassis van Technic in ieder geval monteren, zo is het geworden.
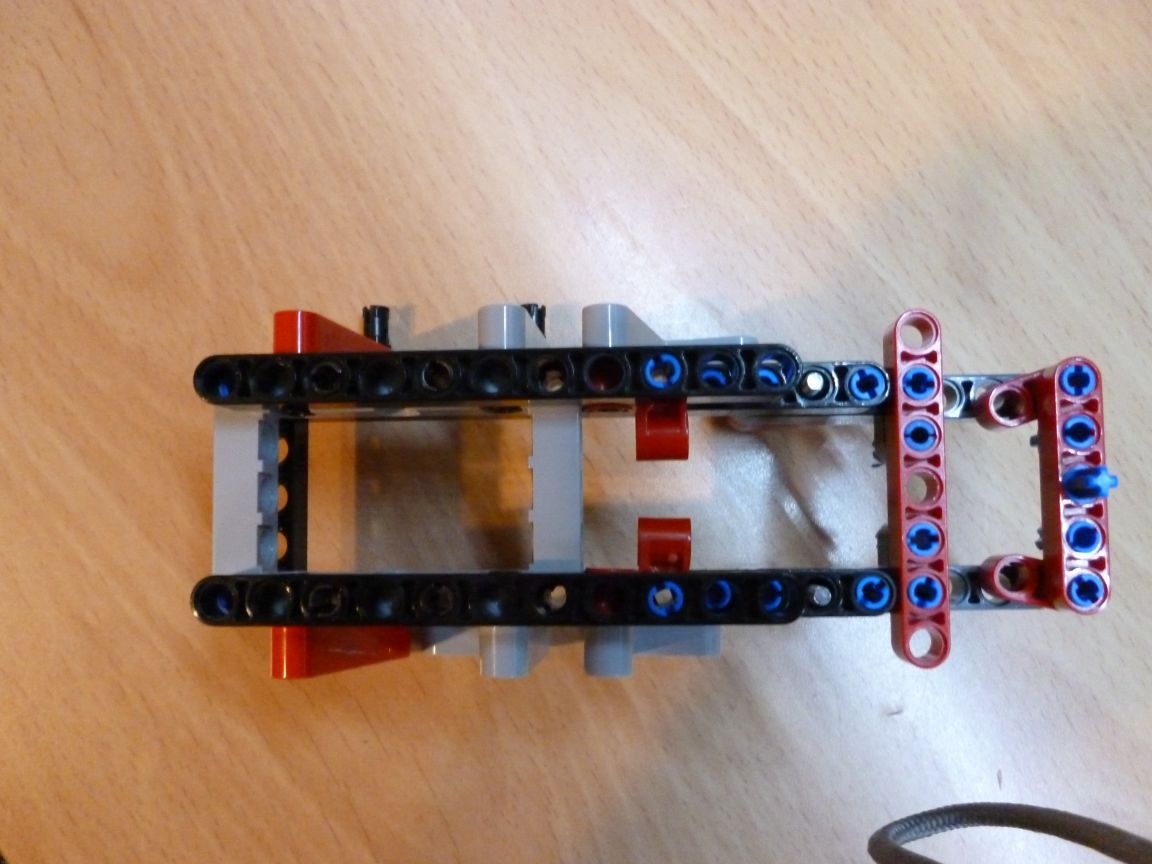
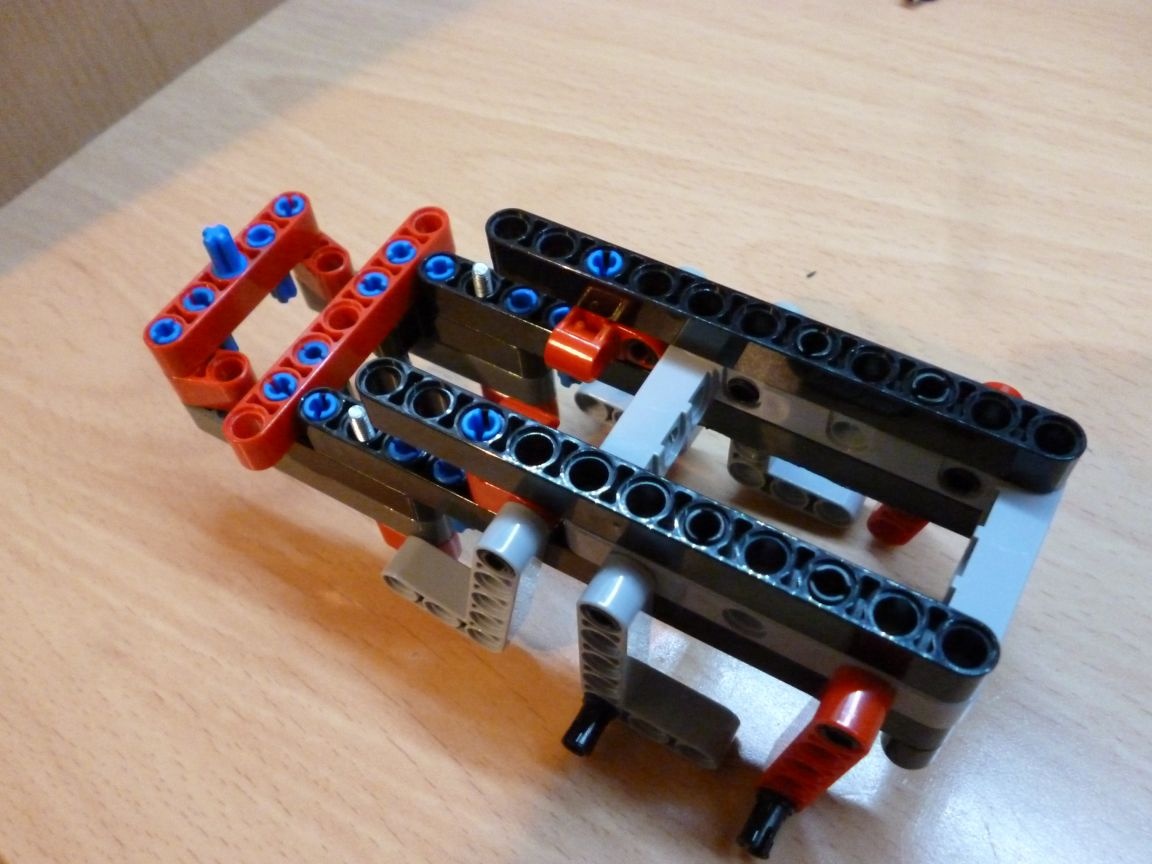
Er is alleen het probleem van het verbinden van de reductiemotor met de onderdelen van de ontwerper. Ik besloot dit als volgt: leg op de as van de reductiemotor een verbindingshuls en steek er een stukje lucifer in voor fixatie. Voor het monteren van de reductiemotor gebruikte metaalplastic van een ijzeren ontwerper en een klem. Het bleek het volgende:
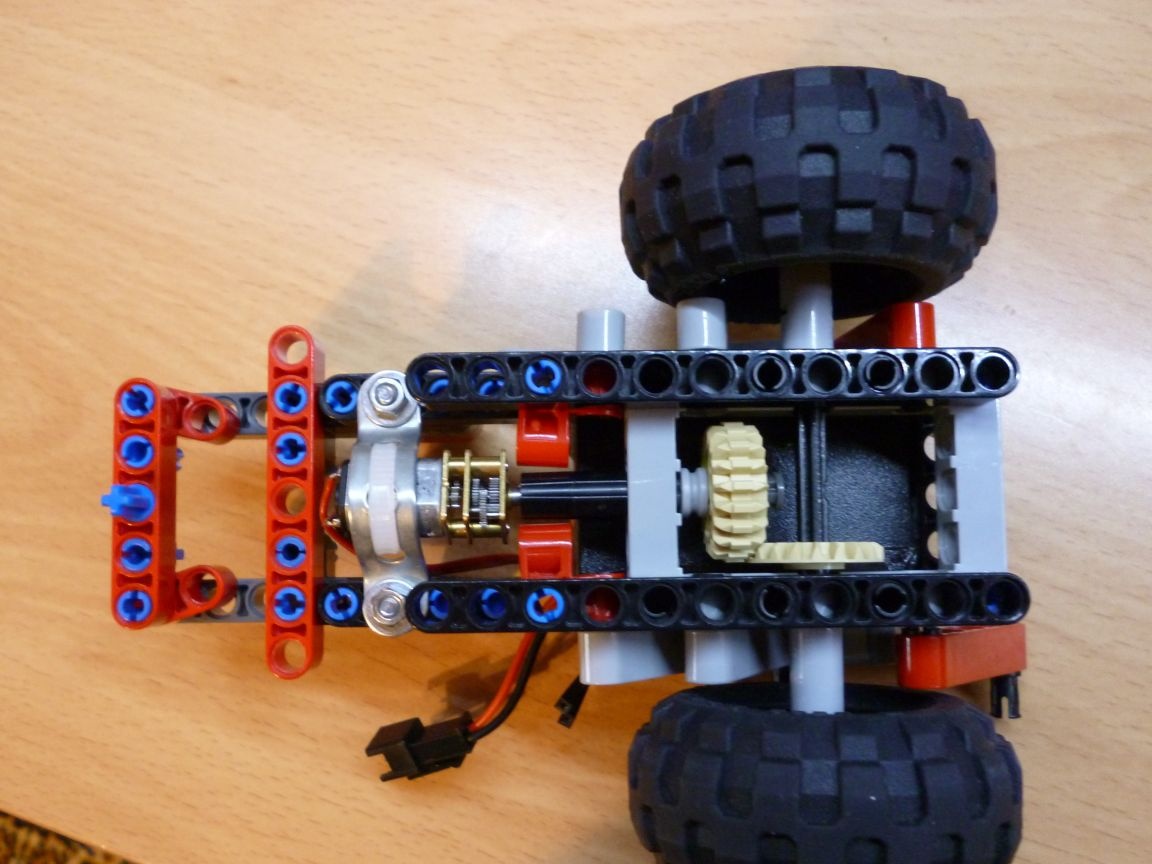
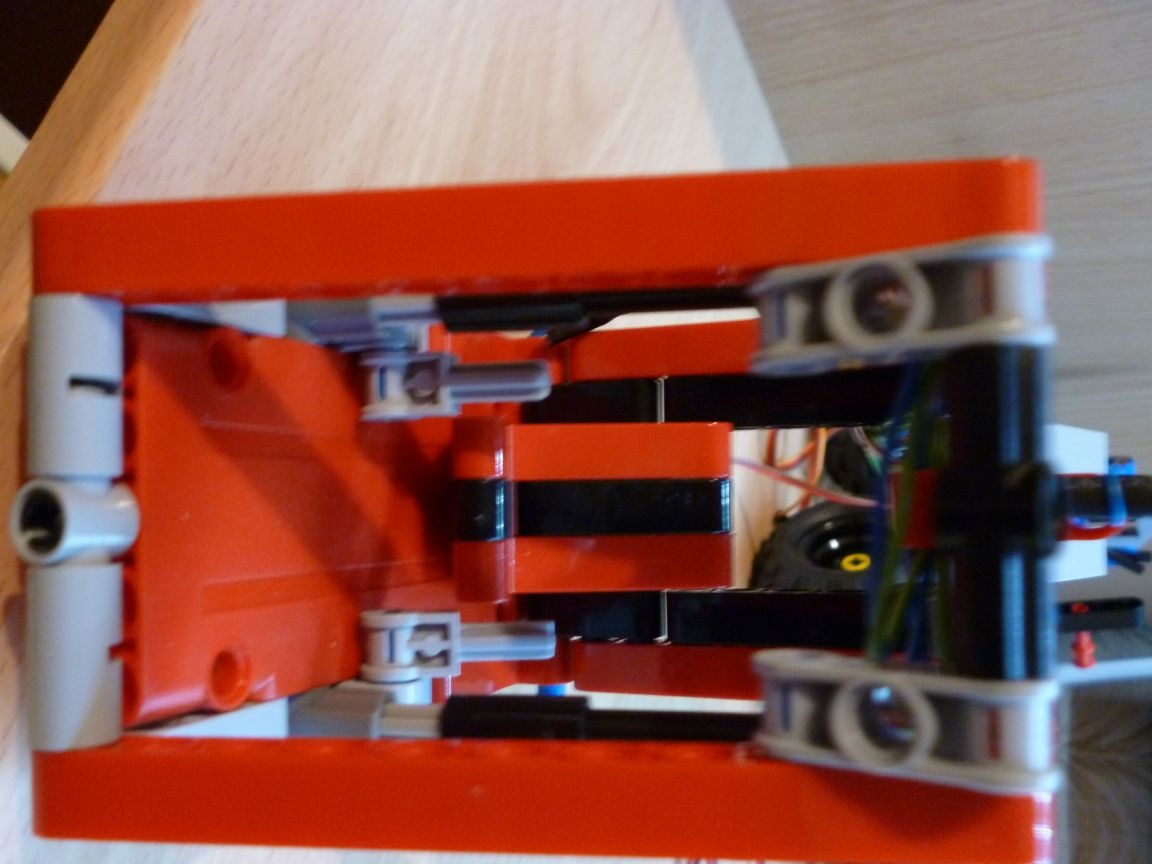
Vervolgens installeren we het resulterende ontwerp op het chassis met 3x40 bouten:
En zet op de wielen:
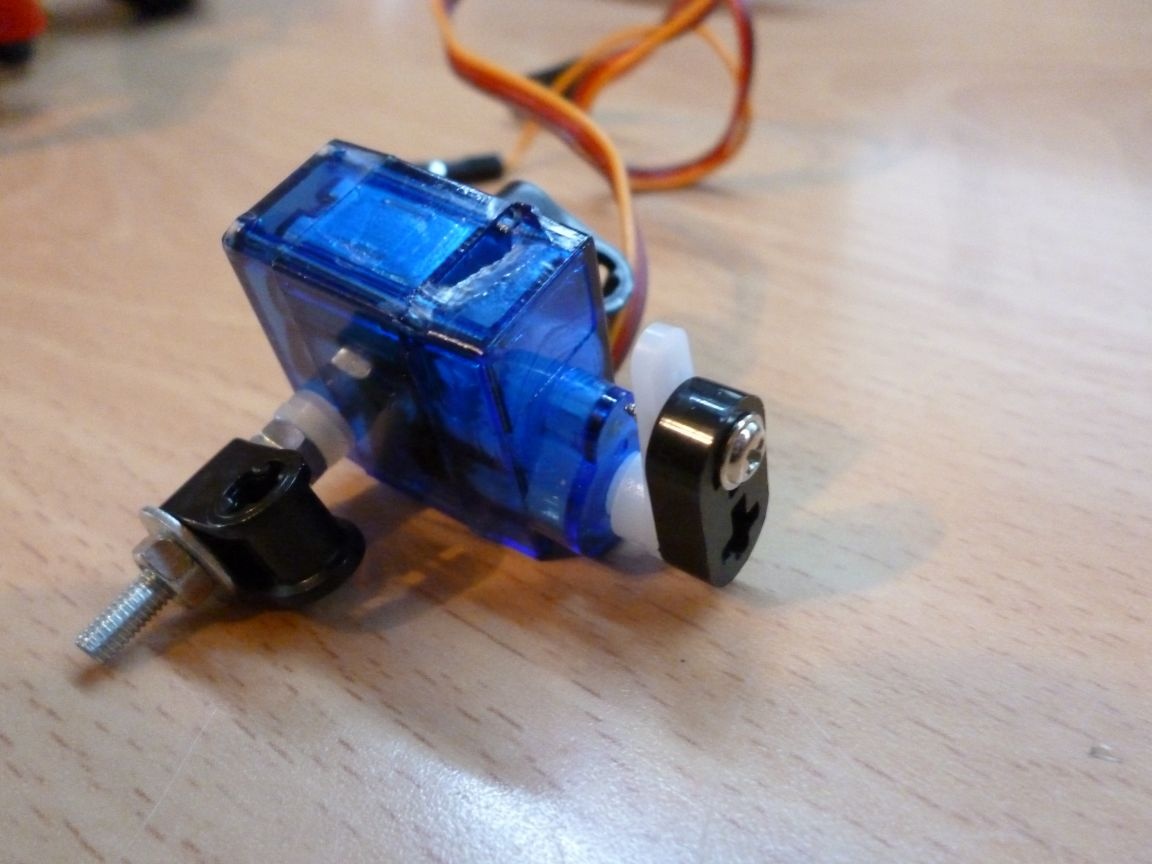
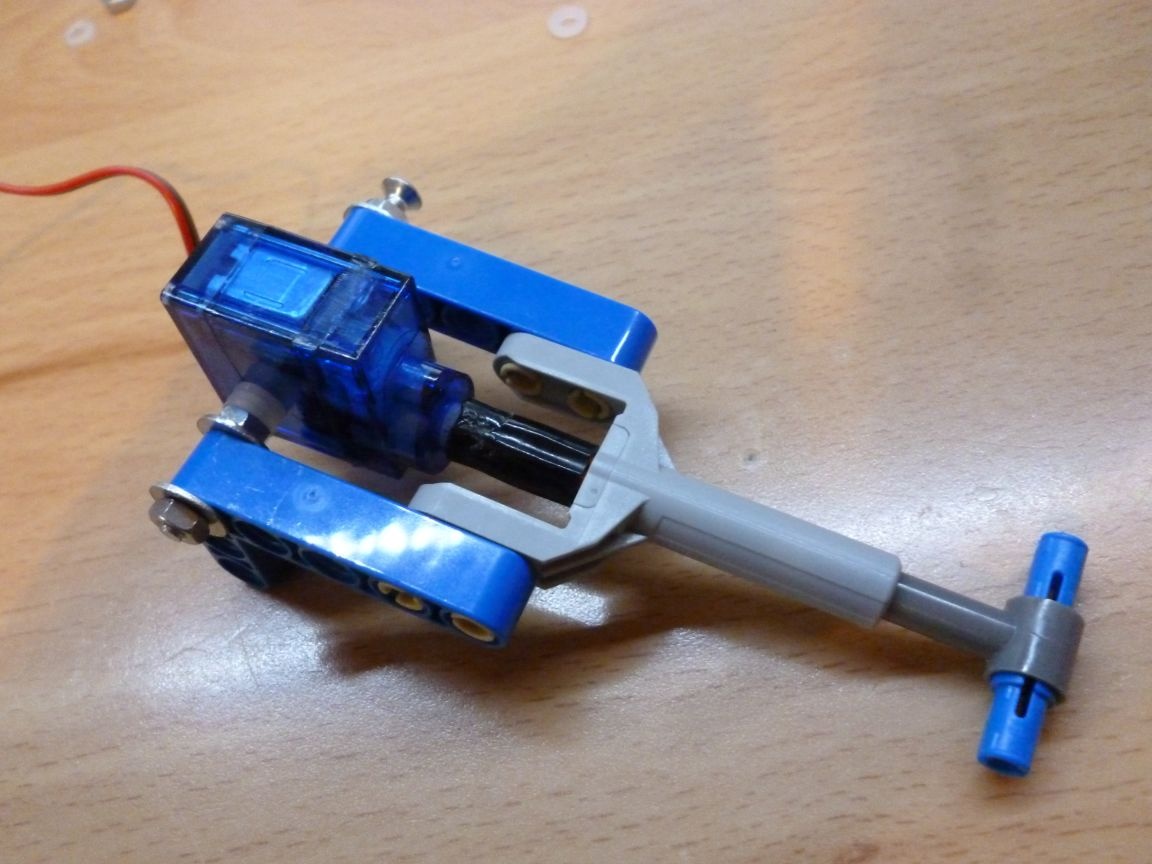
Stap 2 zwenkwielen
Om de rotatie uit te voeren, was de servo SG-90 nodig. Het is noodzakelijk om voorzichtig te boren, om de interne delen niet aan te raken, een doorgaand gat met een diameter van 3,2 mm of gewoon te snijden met een briefpapiermes.

We plaatsen een bout in het gemaakte gat en hoeken langs de randen en repareren met moeren:

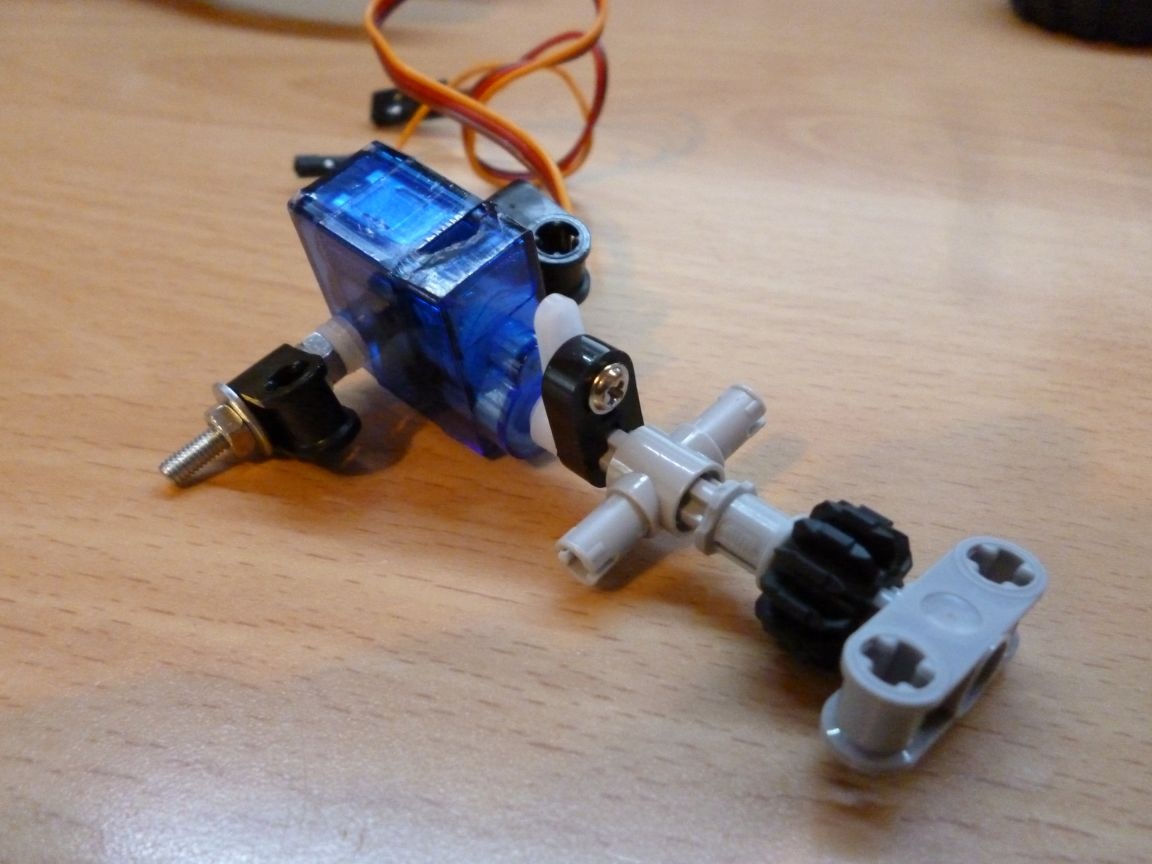
Op de servo-as zetten we een hendel met een geschroefd deel van lego:
En tot slot de zwenkconstructie:
We plaatsen het chassis:

Zet op de wielen:
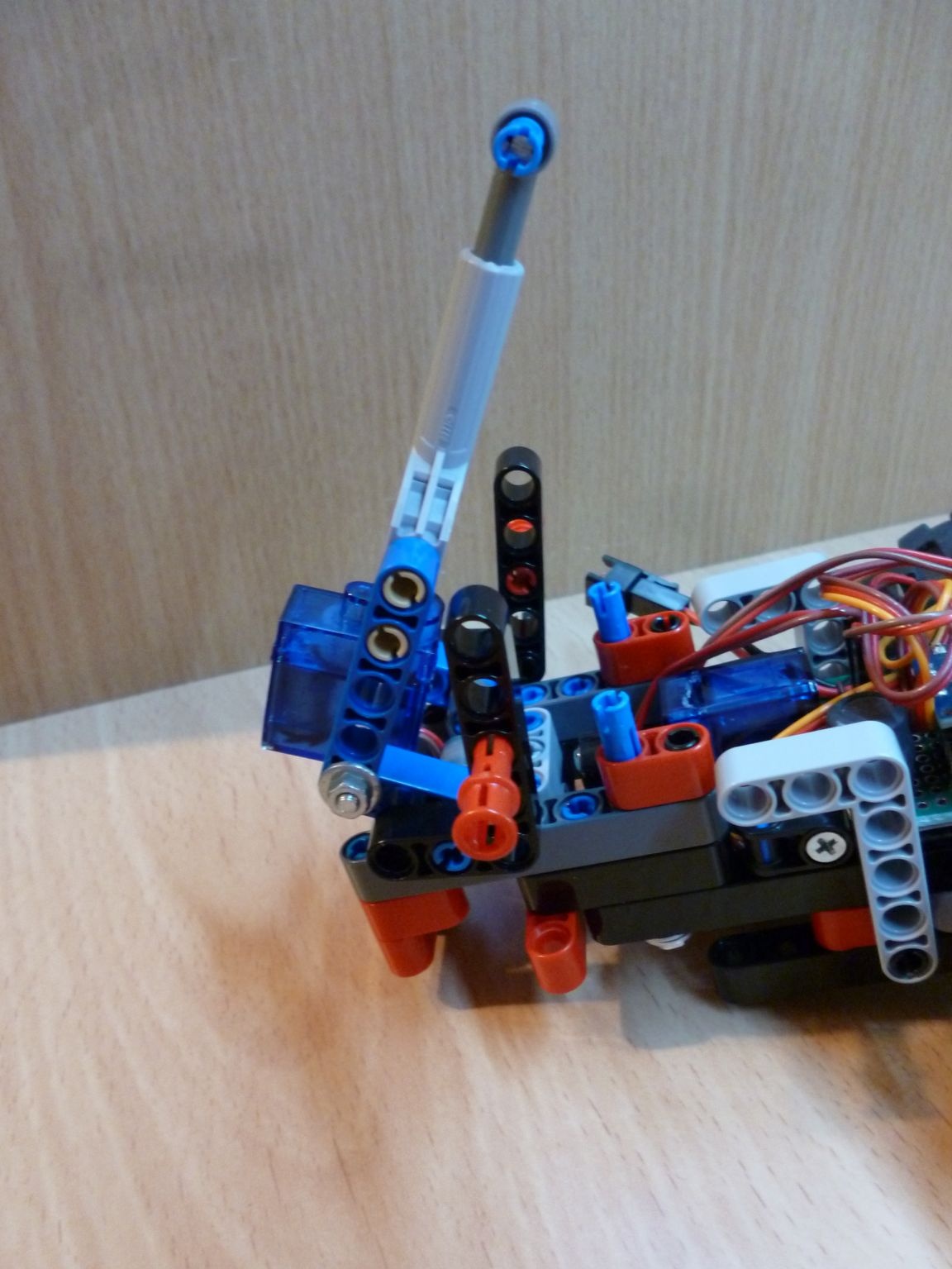
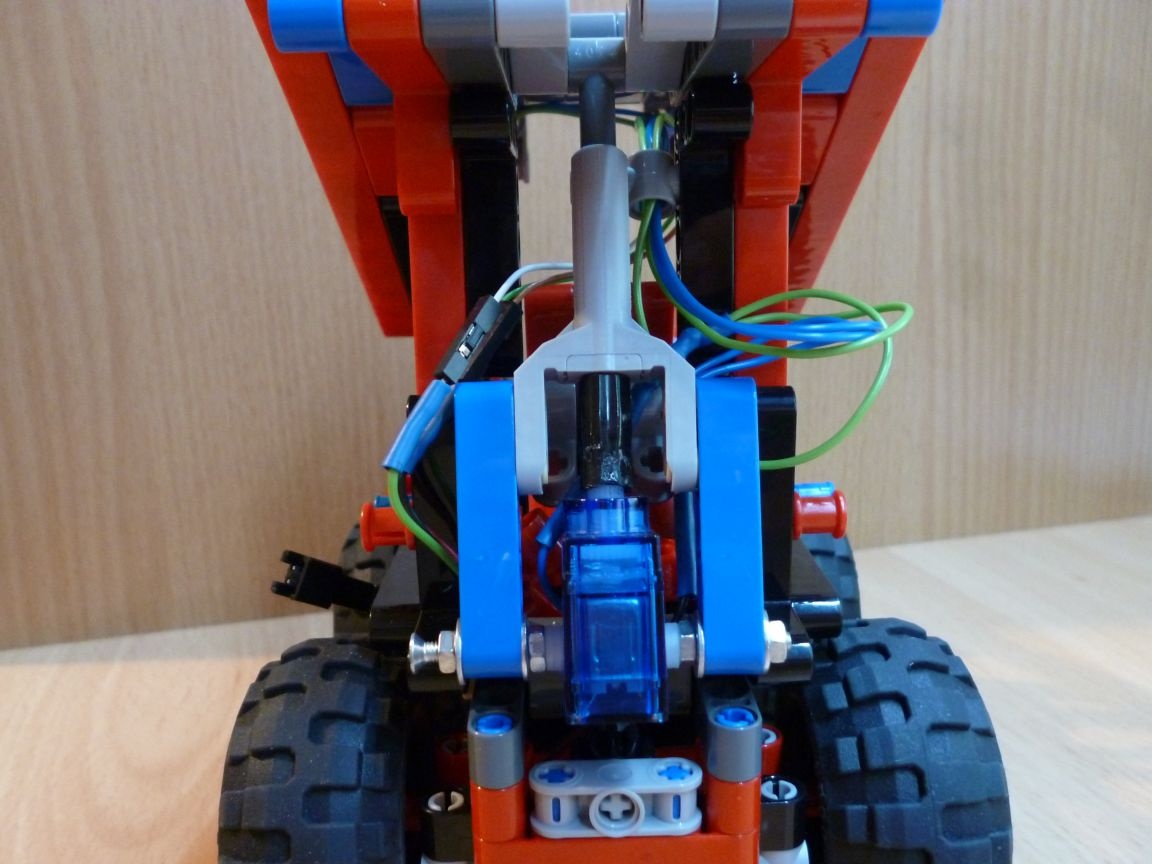
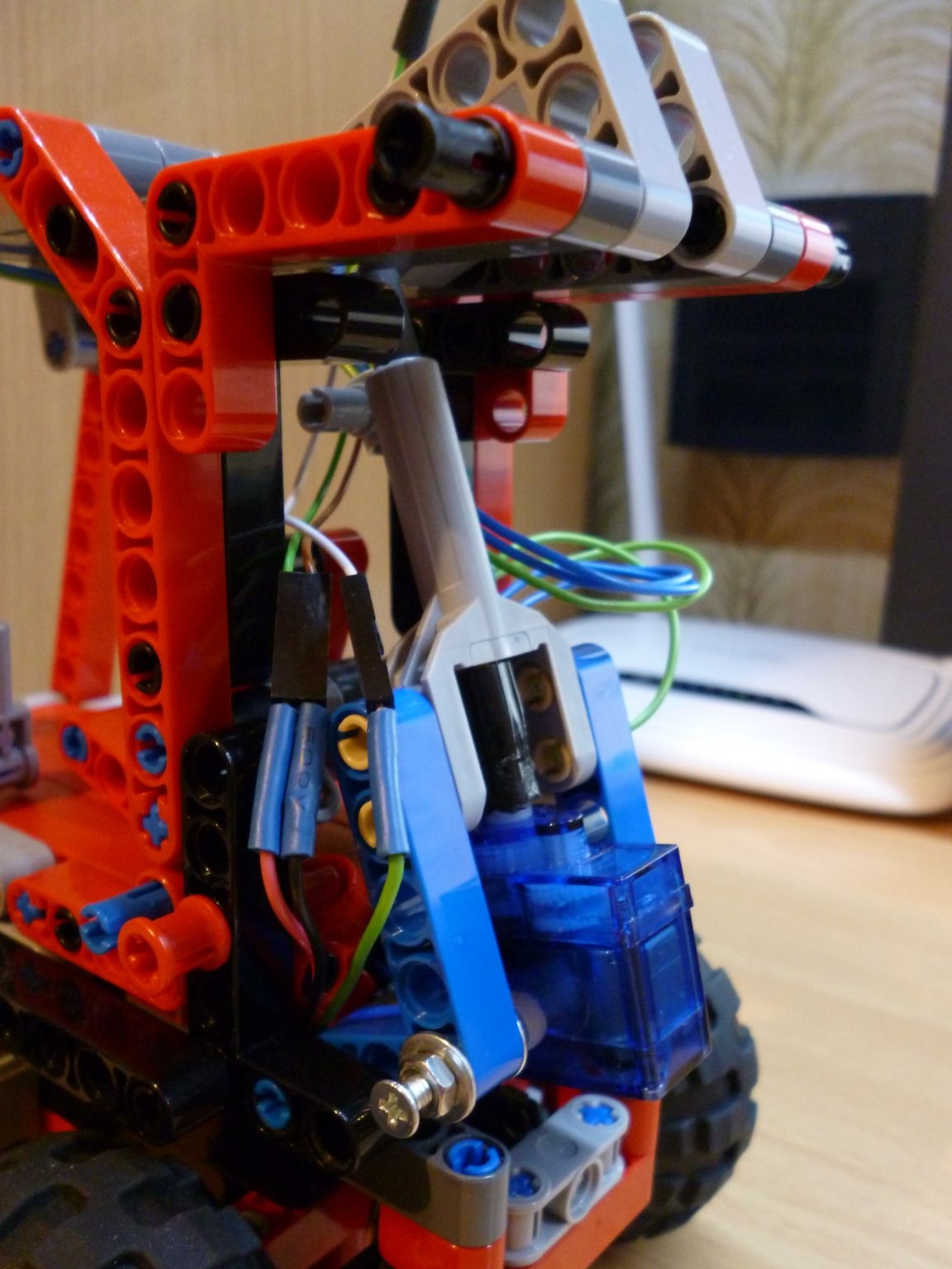
Stap 3 hefwerktuig.
Om de emmer op te tillen was een gemodificeerde servo SG-90 nodig. Het hele punt van zijn modificatie is om de interne controller te verwijderen en de draden rechtstreeks op de motor te solderen om een reductiemotor uit de servo-aandrijving te maken, dat wil zeggen, zodat deze volledig kan draaien. Evenals bij de eerste servo, moet u een doorgaand gat maken voor montage:
Installeer op het chassis:
Stap 4 cabine.
Het is noodzakelijk om een taxi te monteren van lego-techniek van foto's:

Stap 5 is een elektricien.
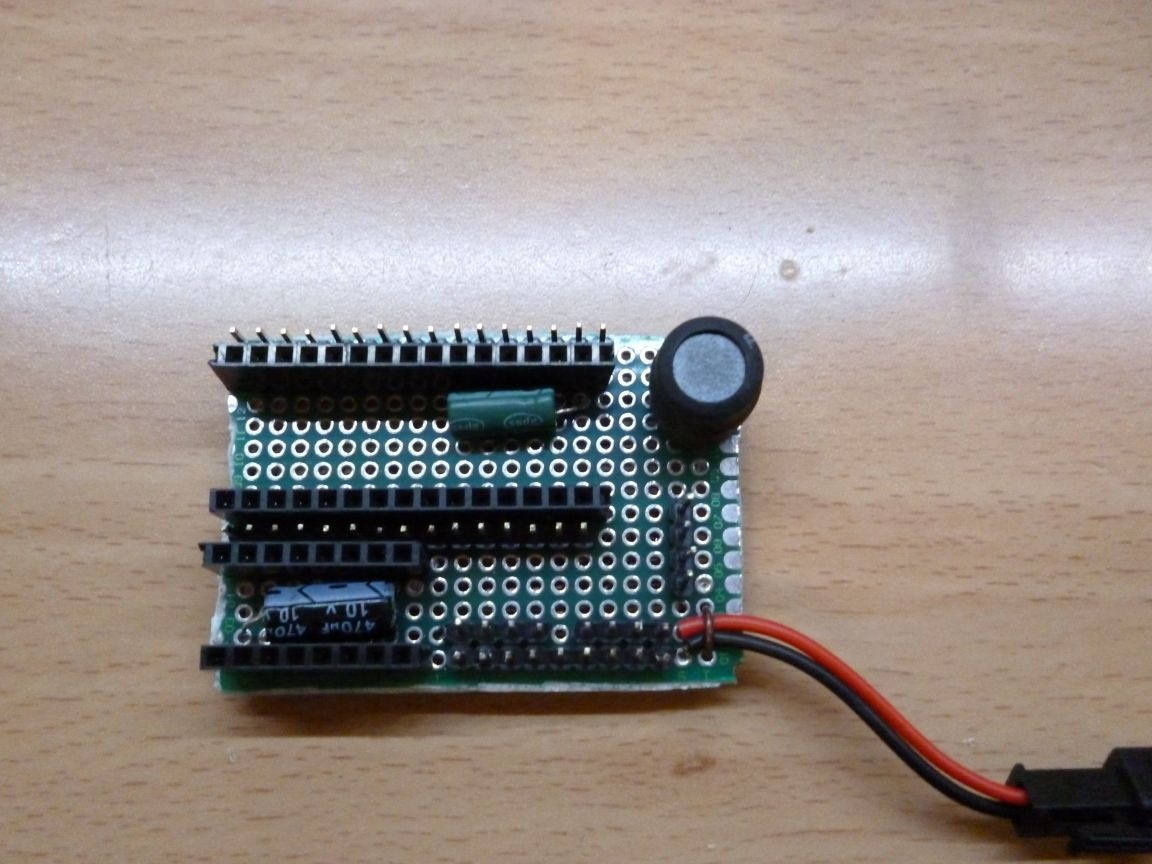
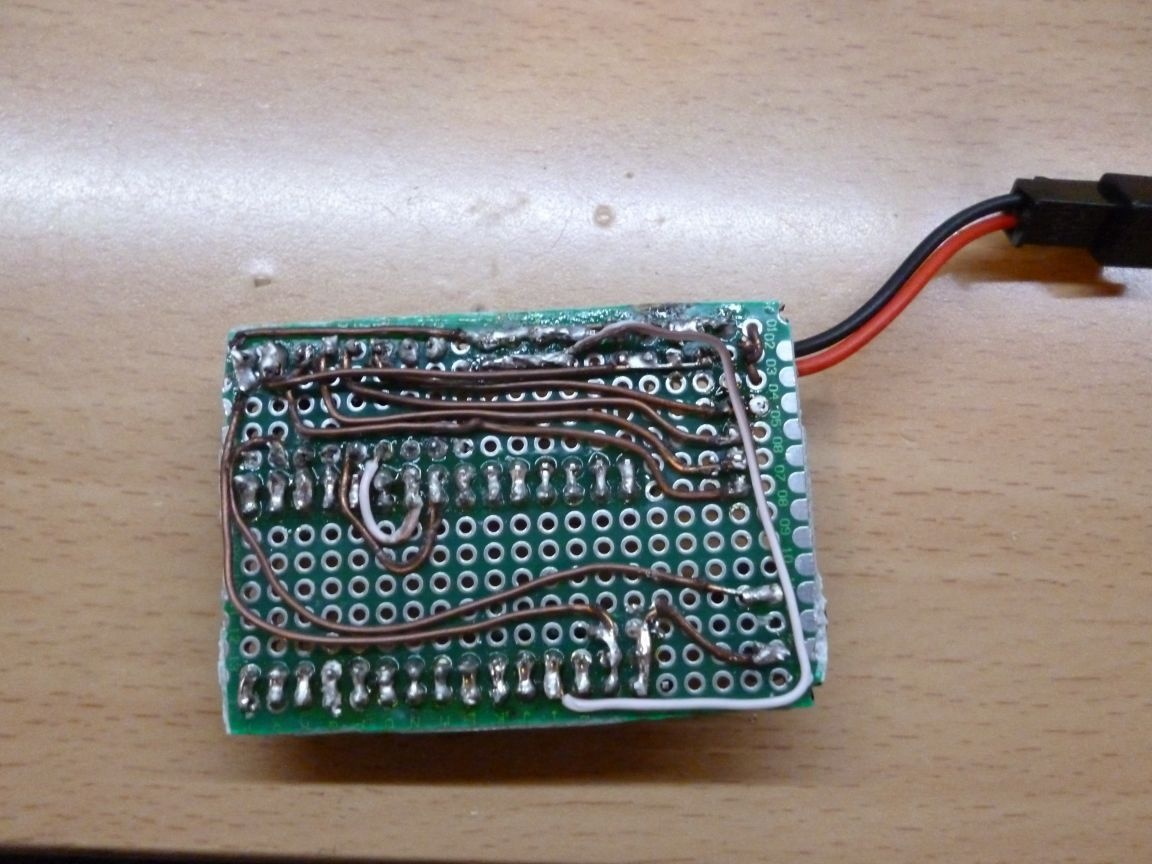
Hier moet je een soldeerbout pakken. Voor het gemak moet u alles op de printplaat solderen volgens het volgende diagram:
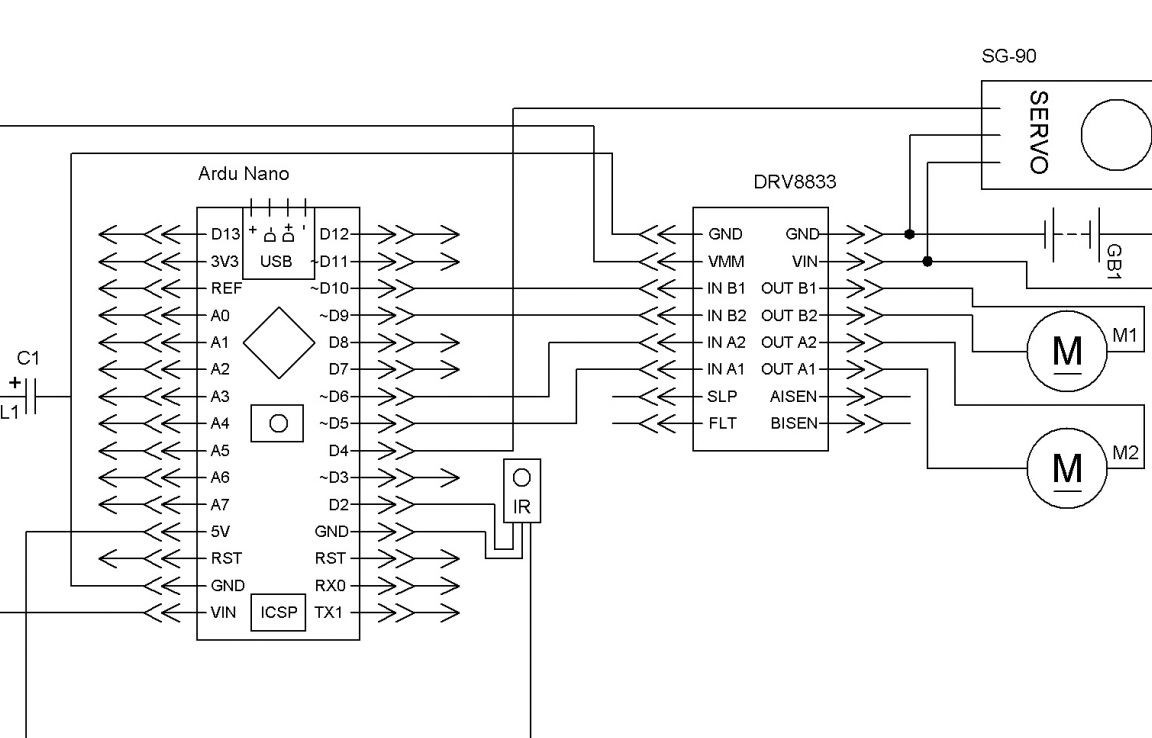
Ik denk dat het de moeite waard is om een beetje uit te leggen: je kunt elke condensator met laag vermogen nemen, je kunt ook een soort inductor vinden, dit is nodig om de spanning van de microcontroller te stabiliseren. Weerstanden moeten worden geselecteerd voor de gebruikte LED's. Ik heb een IR-ontvanger van een oud speeltje gehaald, maar die kun je kopen bij een radiowinkel. Als er sterke interferentie is, voeg dan een condensator toe aan het stroomcircuit van de IR-ontvanger.
Ik heb dit:
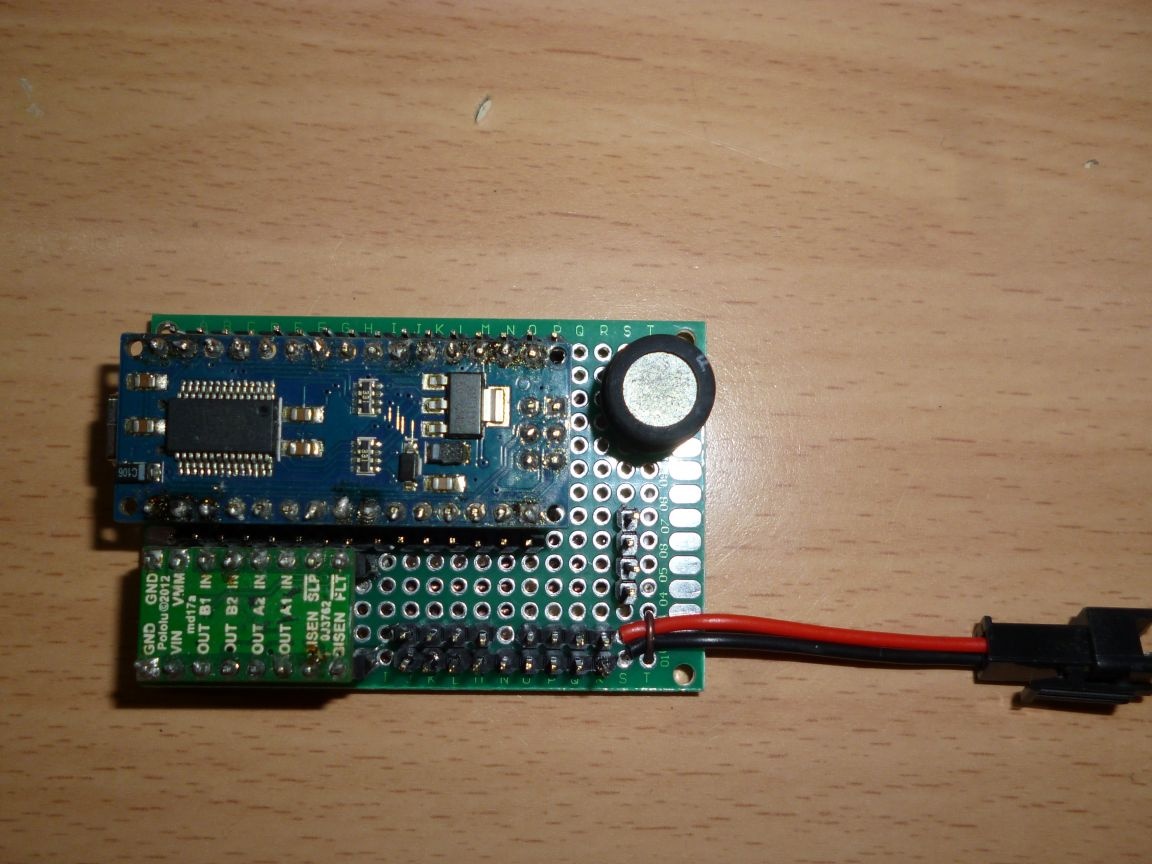
We installeren Arduino Nano en DRV 8833 op hun plaats:
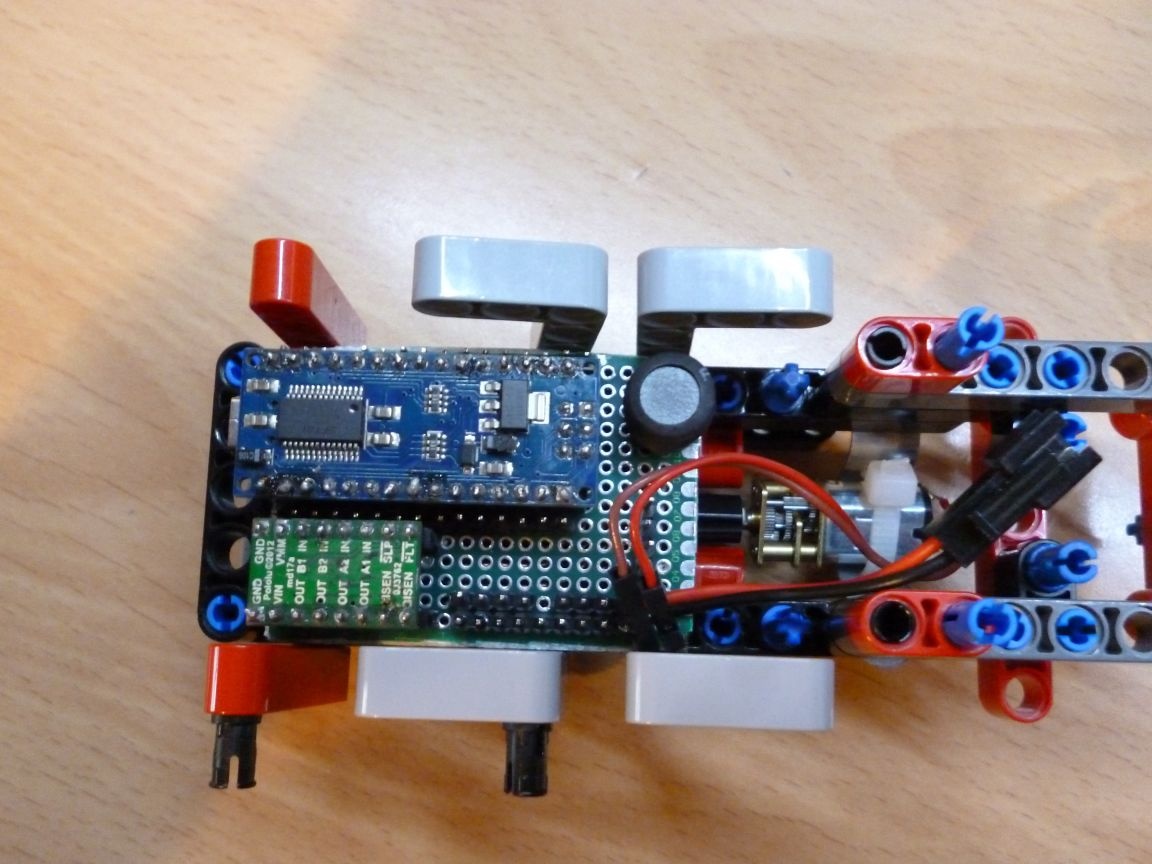
En nu plaatsen we het bord op het chassis (verwijderde de wielen voor het gemak):
Voor voeding gebruikte ik 4 Ni-Mn 1,2v 1000mA-batterijen die in serie zijn geschakeld en met elektrische tape zijn gewikkeld. Ik heb ze op dubbelzijdig plakband onder het cabinedeksel geplakt.
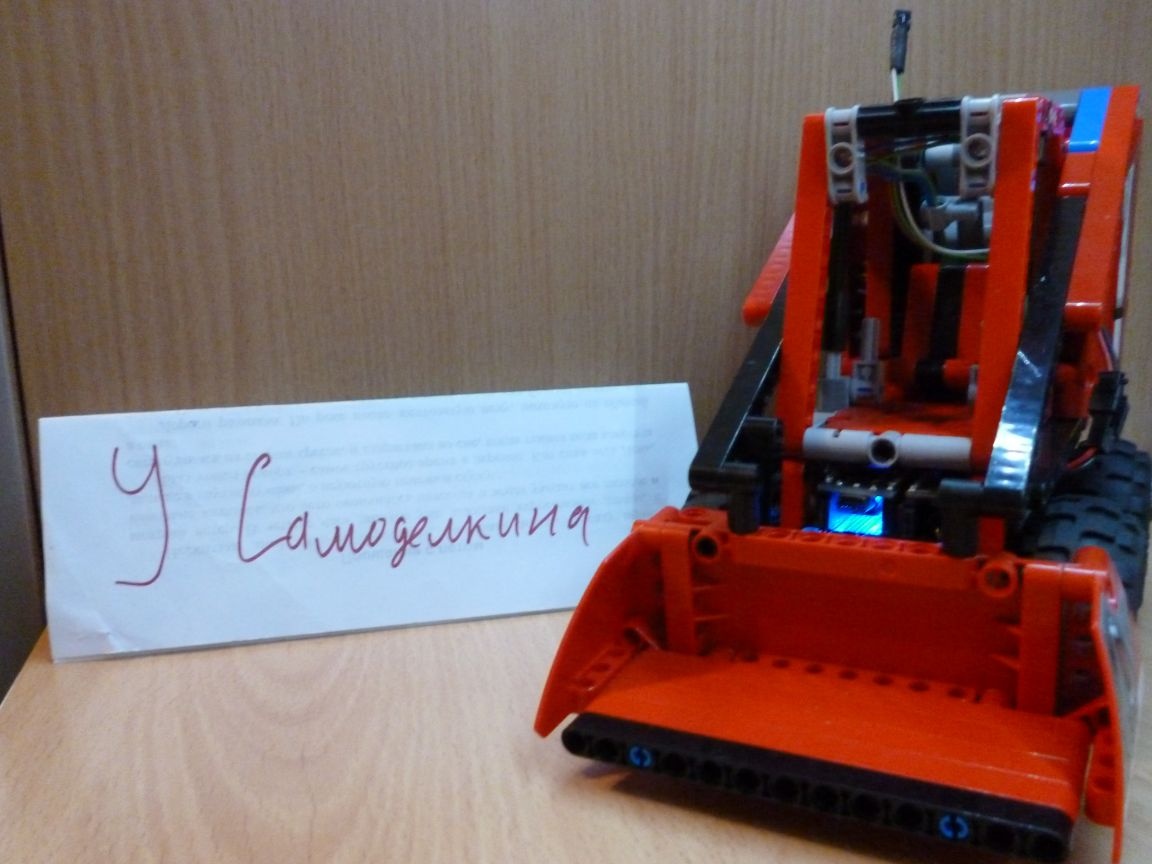
Stap 6 cabine-installatie.
We verbinden de IR-ontvanger, motoren en diodes volgens het diagram, plaatsen de cabine op het chassis, maken de bak vast (elke bak kan worden gemaakt):

Stap 7 firmware.
Ik programmeer in een Arduino IDE. Eerst moet je mijn firmware invullen en via de terminal kijken naar de afstandsbedieningscodes die je gaat gebruiken. U kunt elke IR-afstandsbediening bijvoorbeeld van een tv of dvd-speler nemen. Door op een knop in de terminal te klikken, zien we de code van de ingedrukte knop, noteer deze op een stuk papier. Dit doen we met alle knoppen waarop we de acties van de loader willen programmeren. Bewerk vervolgens de schets. We schrijven de codes die we hebben vastgelegd voor de noodzakelijke acties erin op en knipperen het opnieuw.
Firmware
Loader video: