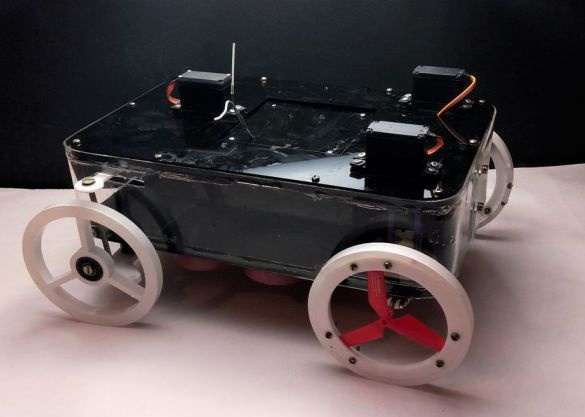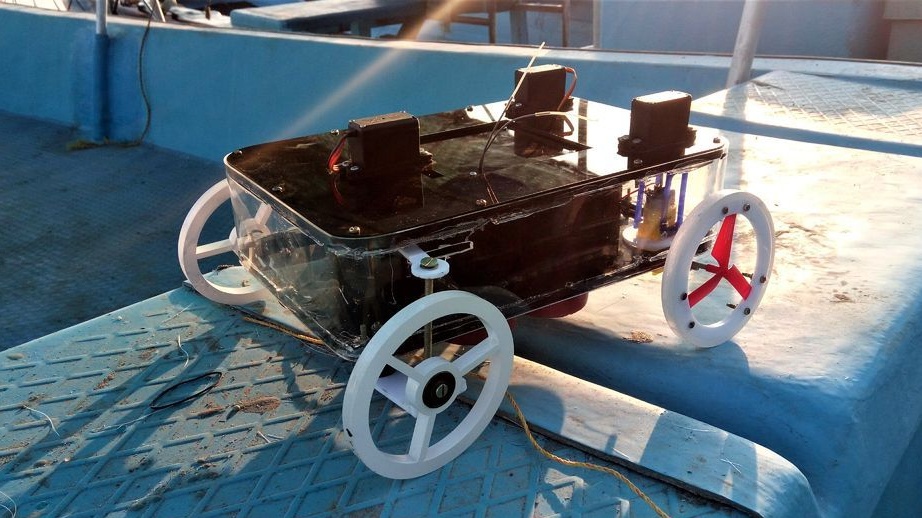



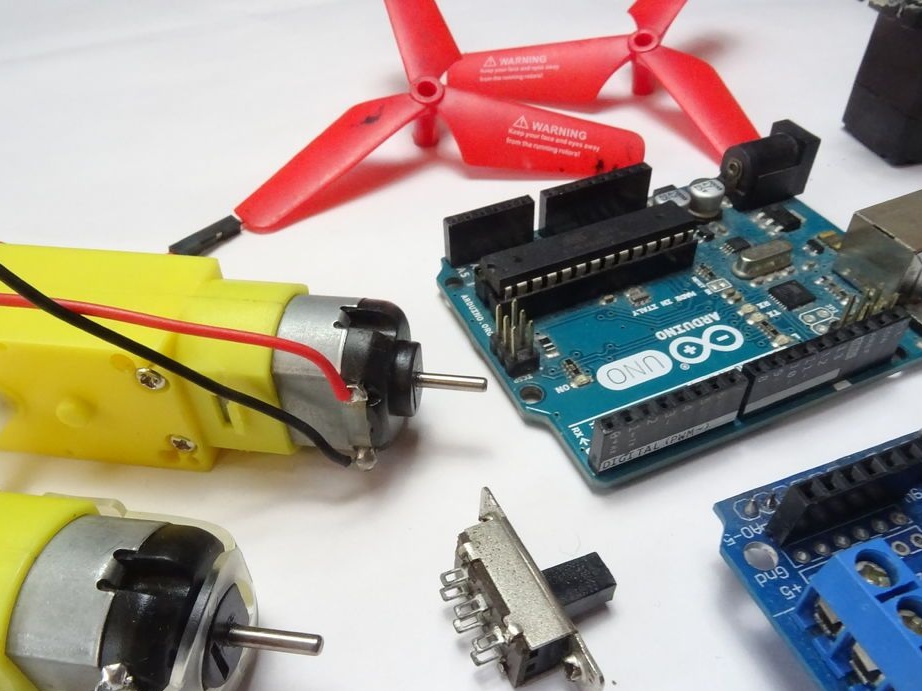
In dit artikel gaan we in op de vervaardiging door Indiase ambachtslieden van een terreinwagen die zowel over land als over water rijdt. Voertuig voor elk terrein bestaat uit een drijvend platform met wielen en een propeller. Mechanismen worden bediend via afstandsbediening via Arduino UNO.
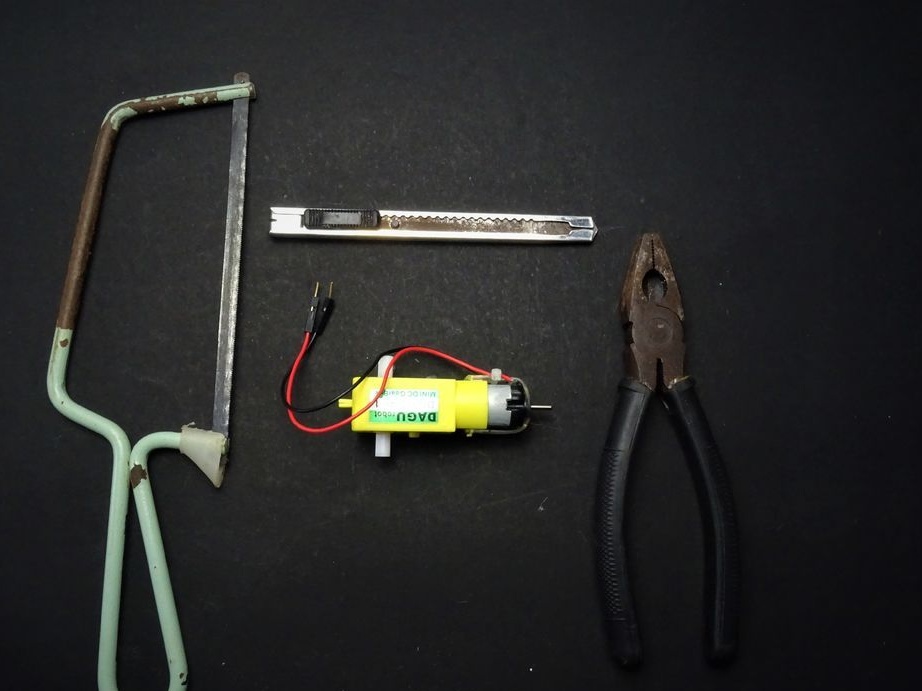
Gereedschap en materialen:
-
-AKB 9V;
-Schakelen;
-Acryl;
-Plex;
(ter referentie is het lager 8 x 16 x 5 mm, de auteur geeft 8 * 22 mm aan)
-Twee propellers;
-Fasters;
-Drijft;
-Lijmpistool;
-Super lijm;
Epoxyhars;
-Soldeerbout;
-Boor;
-Lasersnijder;
-Zaag;
- schroevendraaier;
-Boor;
-Soldeerbout;
-Boord;
-Computer met software;


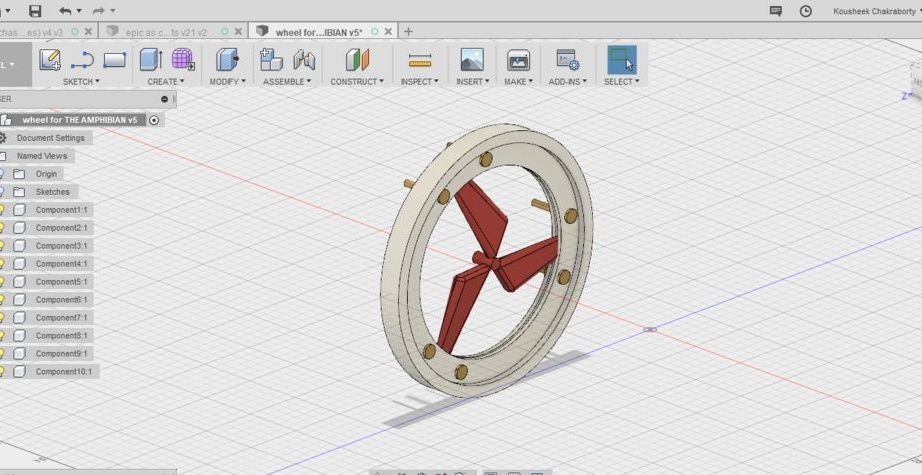
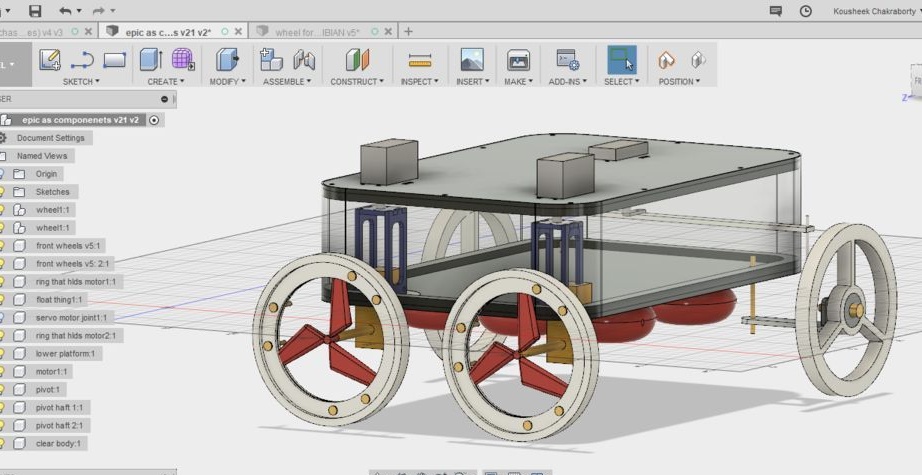
Stap één: ontwerp
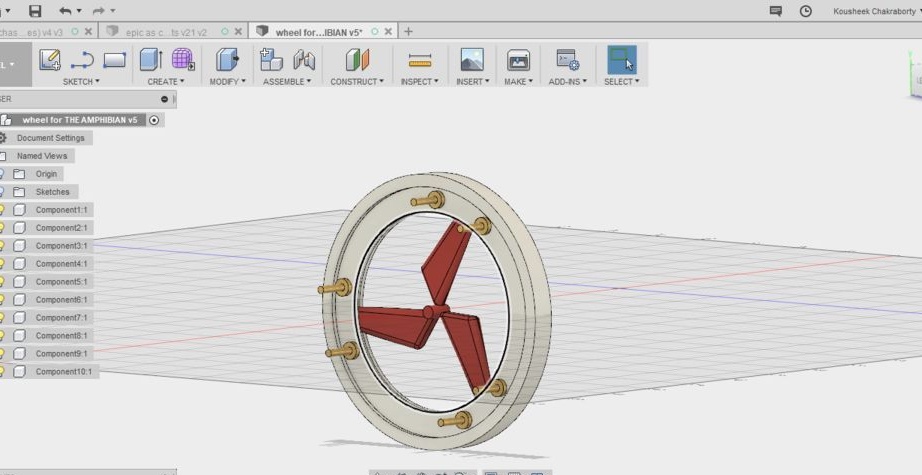
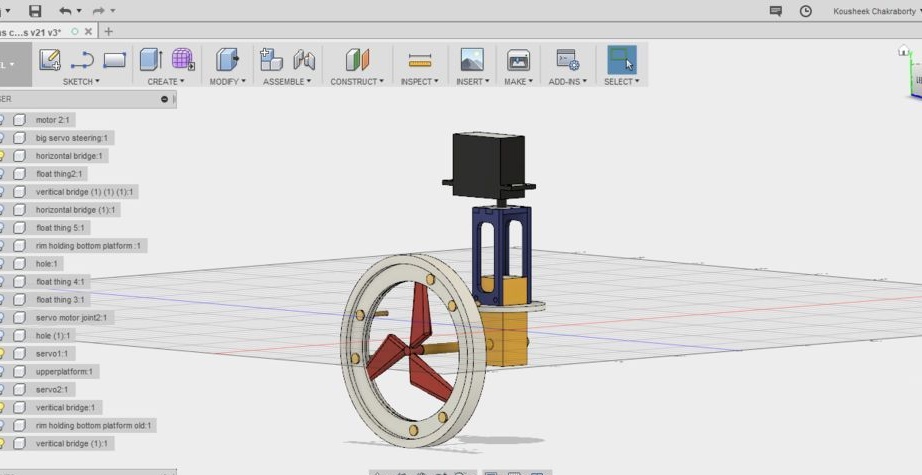
Om het project te creëren, gebruikten de meesters het Fusion 360-programma. De hele moeilijkheid was om beweging op het land en in het water te combineren. Bij het ontwerpen van de wielen ontwikkelden de meesters een systeem waarbij de schroeven in het water zouden openen, maar gezien de complexiteit van het ontwerp, integreerden ze eenvoudig de propellers van het kinderspeelgoed in het wiel. Hierdoor kunnen de wielen het terreinvoertuig op het land verplaatsen en wanneer ze het water in gaan, worden de schroeven aangezet.
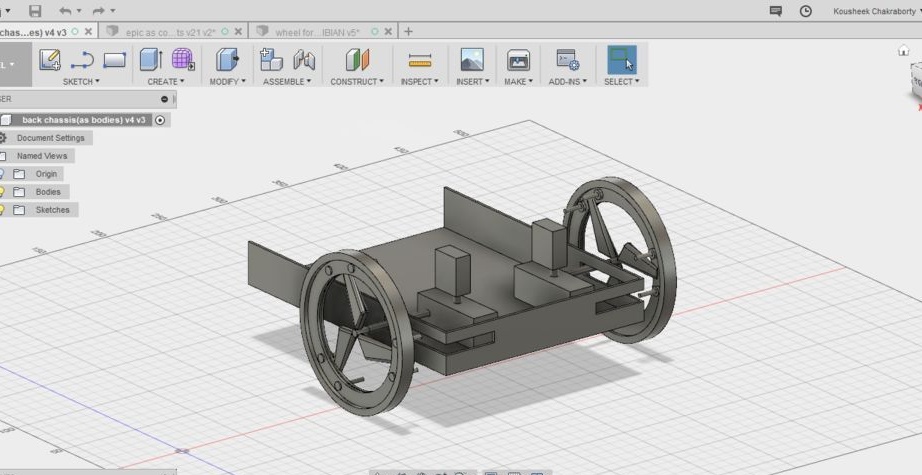
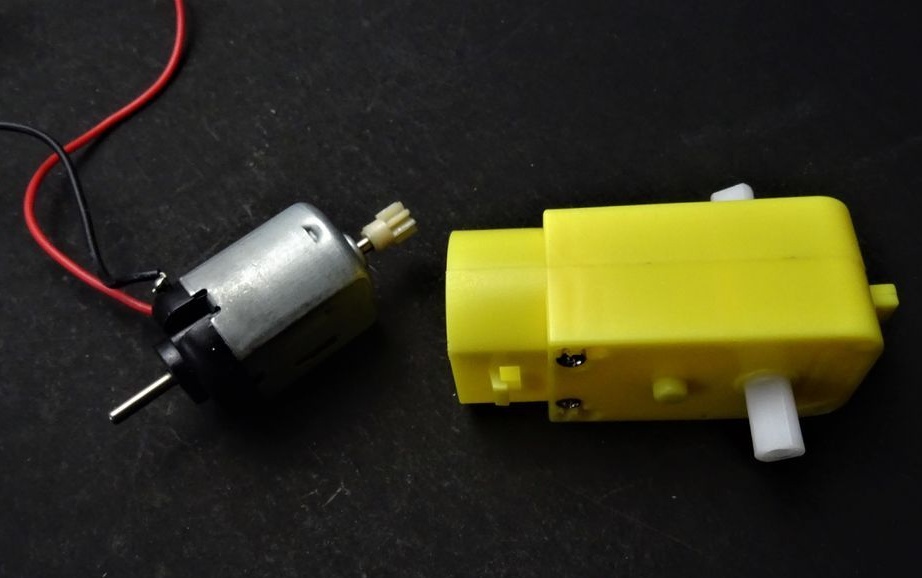
Om dit idee te implementeren, moet je de achterwielen loodrecht op het terreinvoertuig kunnen draaien wanneer je op het water rijdt. Dit werd mogelijk door het verwijderen van motortandwielen uit het frame. Kunststof versnellingsbakken en water dat erin binnendringt, kunnen geen kwaad.
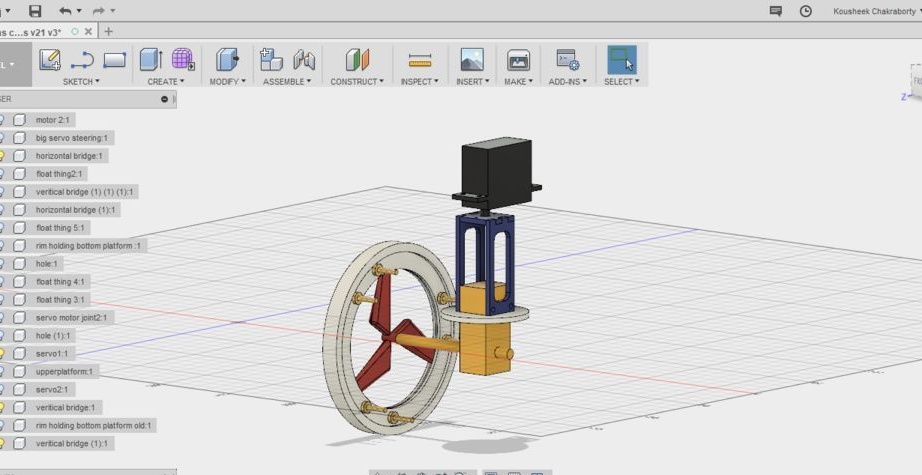
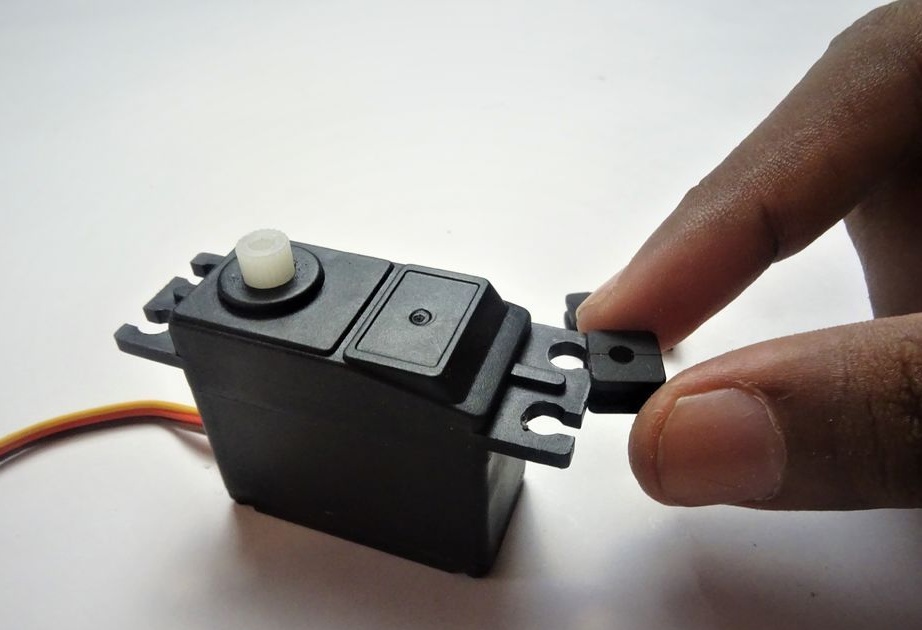
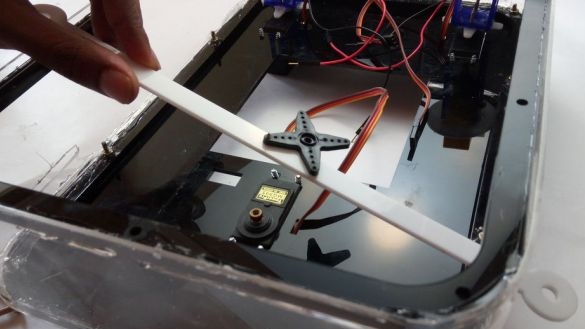
De rotatie van de wielschroeven wordt uitgevoerd met een servo-aandrijving.
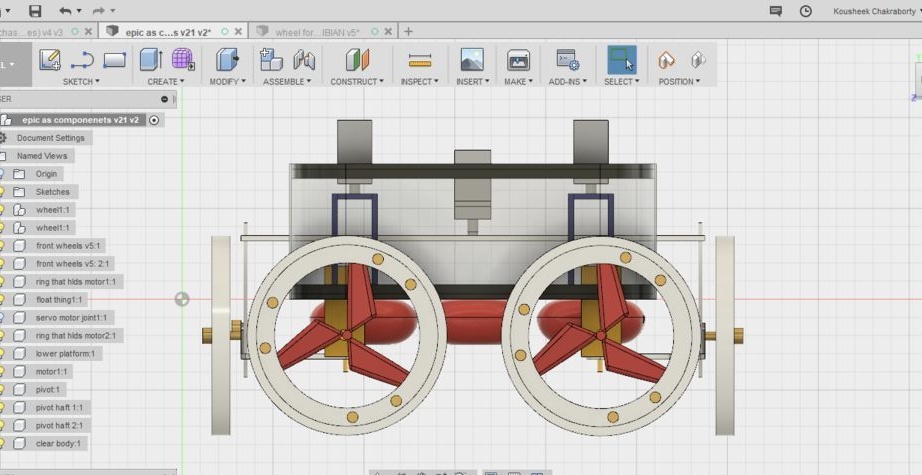
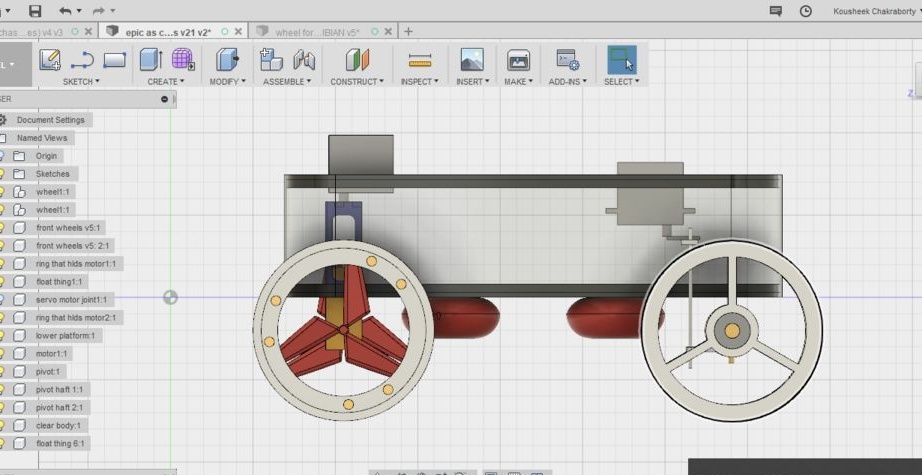
Het terreinwagen heeft twee draaimechanismen. Een om de achterwielen van de propellers in het water te bedienen, en de tweede om op het land te rijden, bestuurt de voorwielen. De draaihoek van de voorwielen is 35 graden waardoor je scherpe bochten maakt.
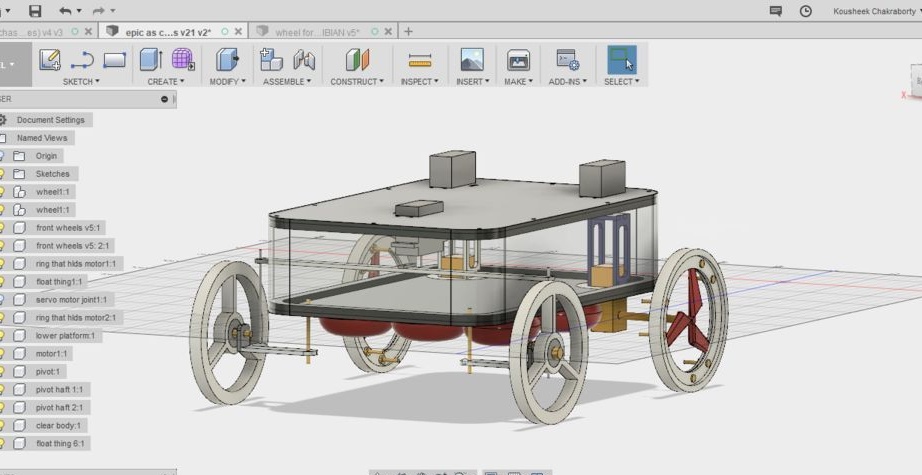
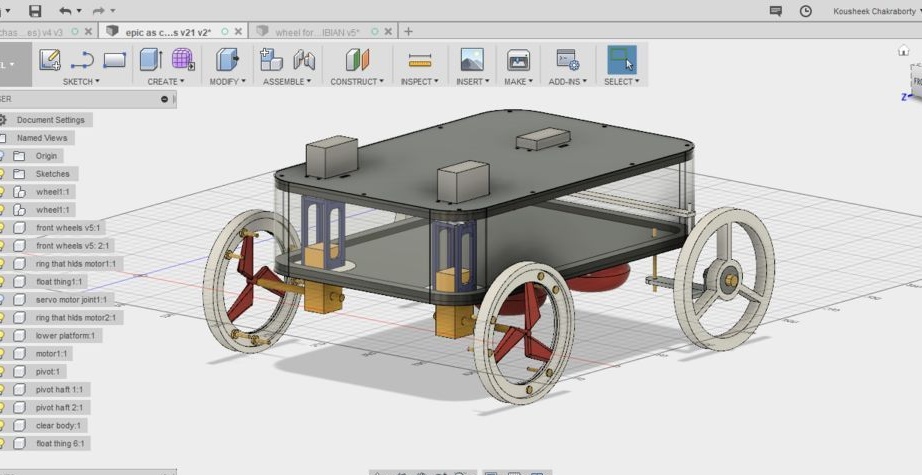
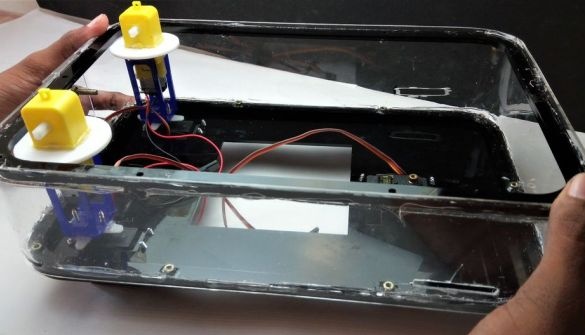
Op de onderstaande afbeeldingen ziet u de transformatie van het terreinvoertuig wanneer u door land en water beweegt.
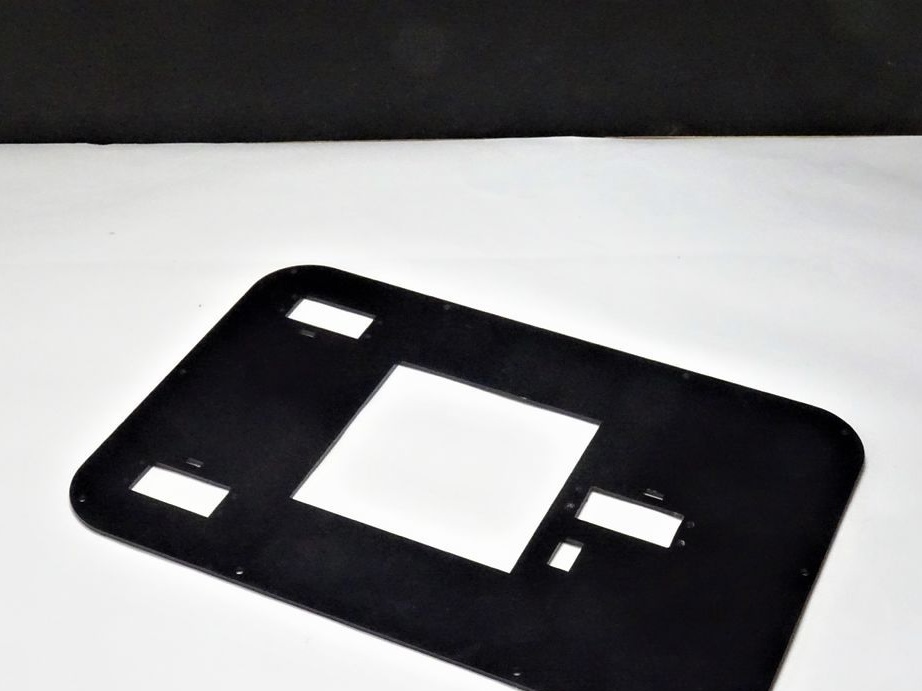
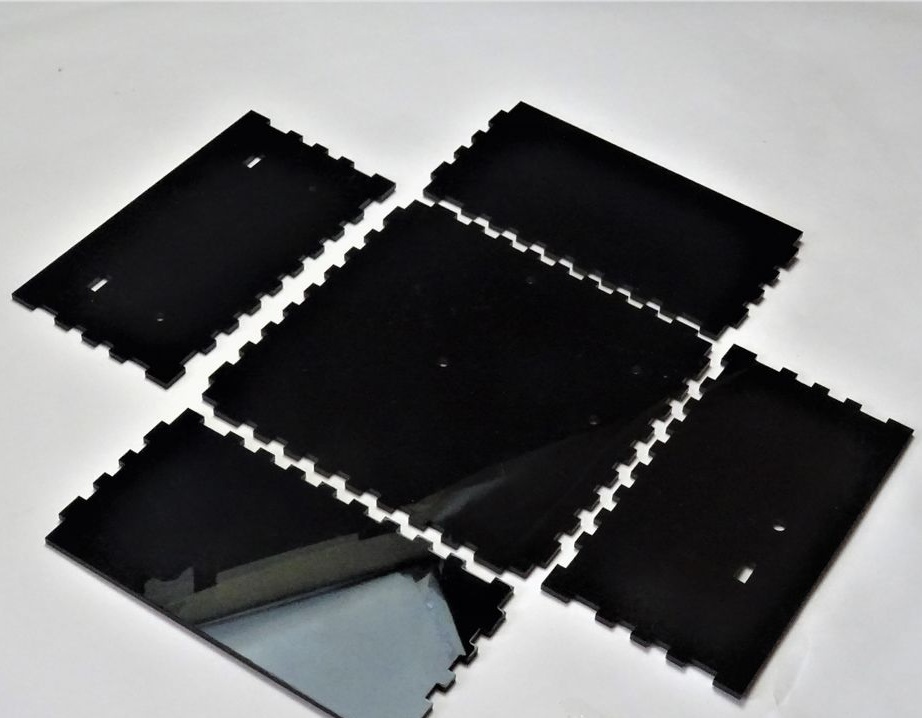
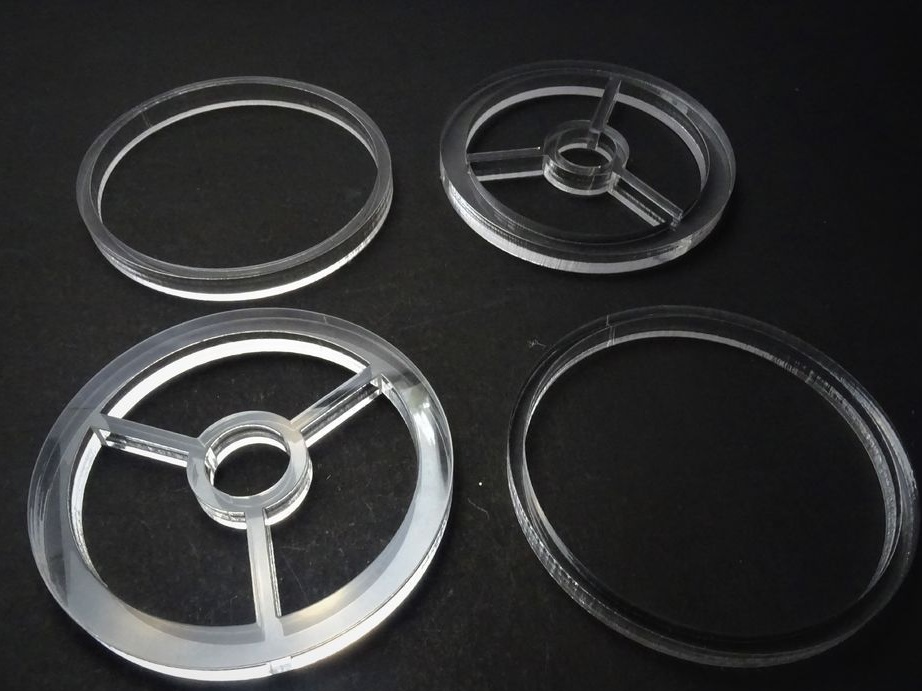
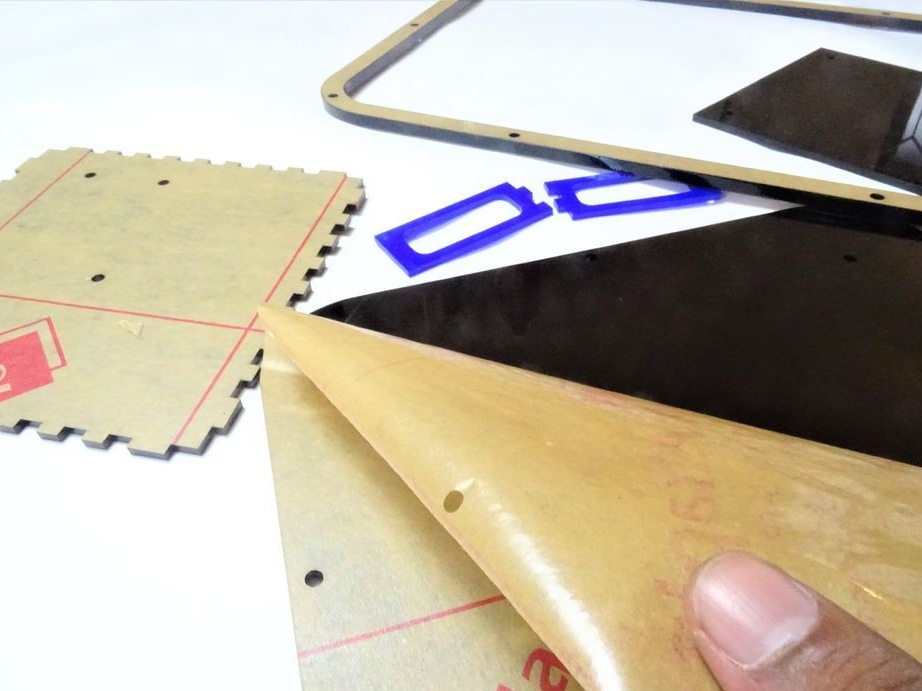
Stap twee: lasersnijden
Voor het terreinwagen gebruikte de meester acryl van verschillende diktes en kleuren.
Zwarte toplaag 3 mm x 1
Bodemlaag Zwart 3 mm x 1
Zwart zijframe 5 mm x 2
Zijwand transparant 2 mm x 1
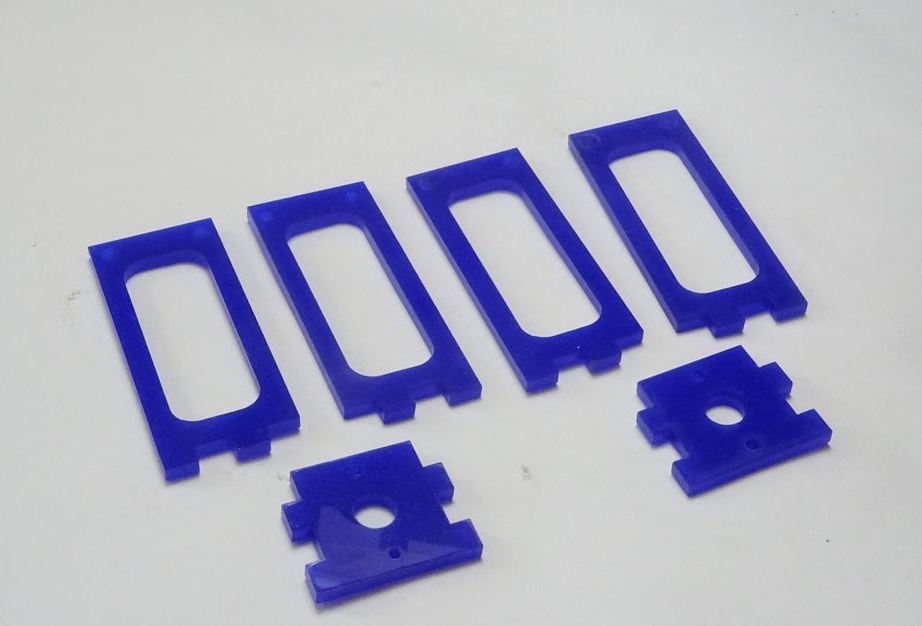
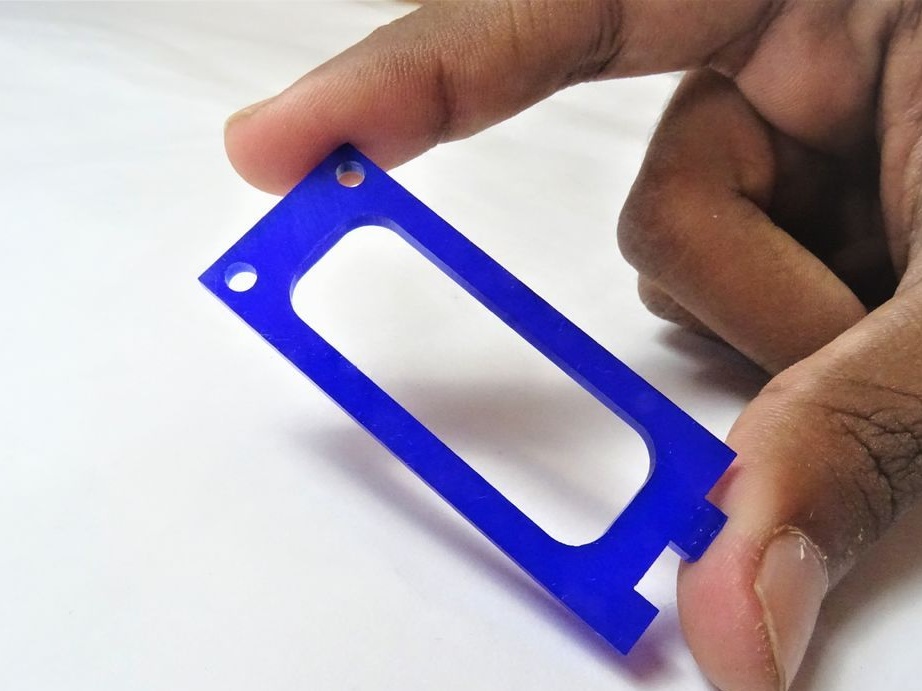
Powerzijde blauw 3 mm x 4
Brug bovenstuk blauw 3 mm x 2
Motor DisK Wit 3 mm x 2
Voorwiel wit 10 mm x 2
Binnenrand (achterwiel) Wit 3 mm x 4
Buitenrand (achterwiel) Wit 10 mm x 2
Stuur wit 3 mm x 1
Ladekast Zwart 3 mm x 1
Zwarte compartimentafdekking 3 mm x 1
Motoras achterzijde Wit 3 mm x 2
Voorpaneel wit 5 mm x 2



U kunt het bestand voor de CNC downloaden via de link.
Lasersnijden Rover onderdelen. Zip
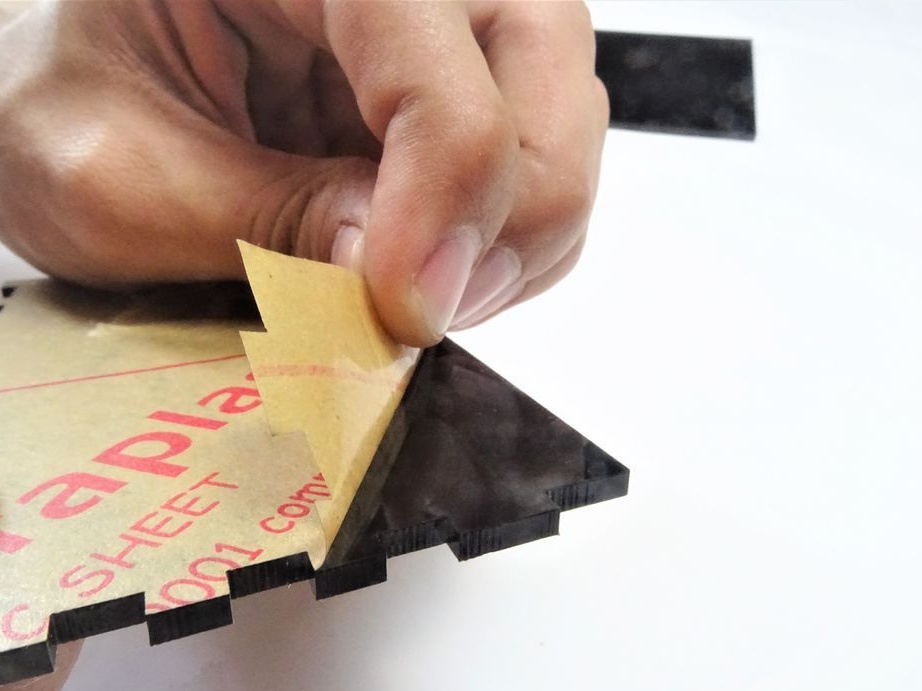
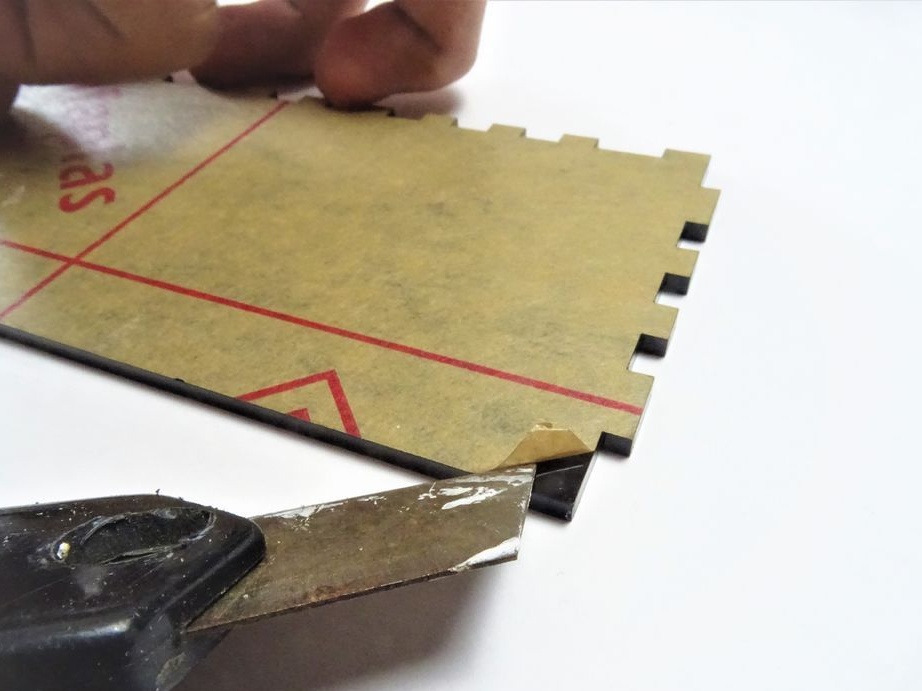
Verwijdert na het vervaardigen van de onderdelen de beschermlaag ervan.
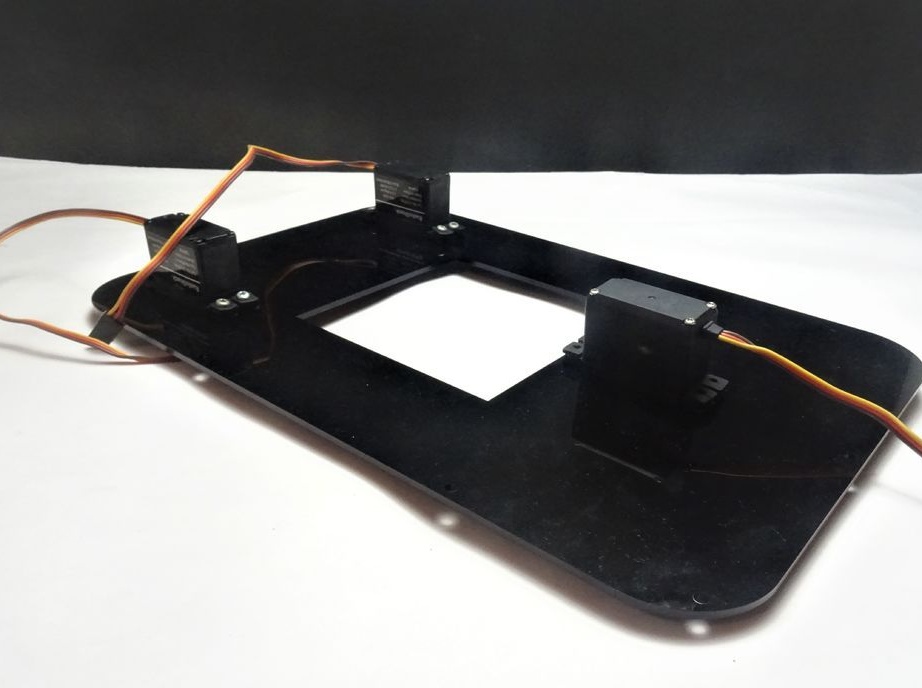
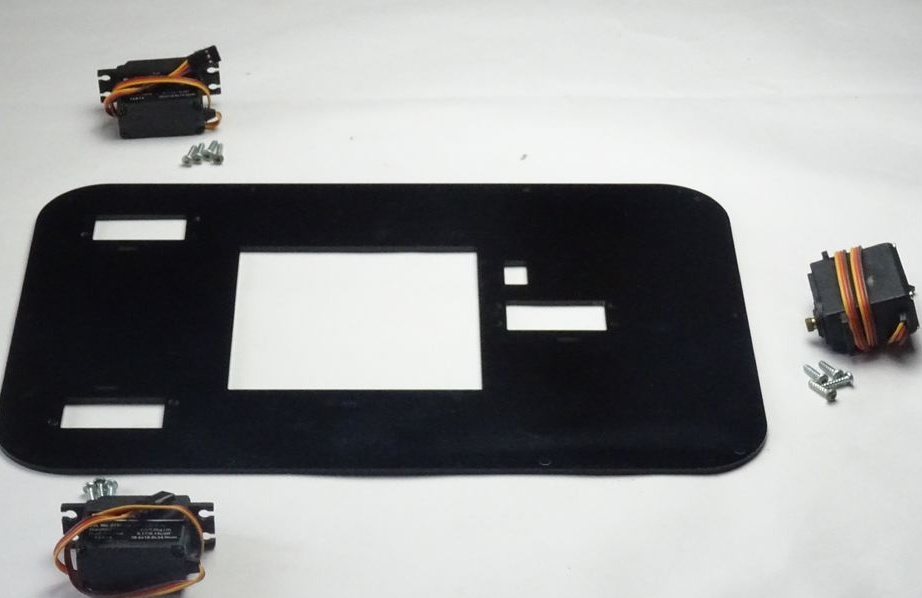
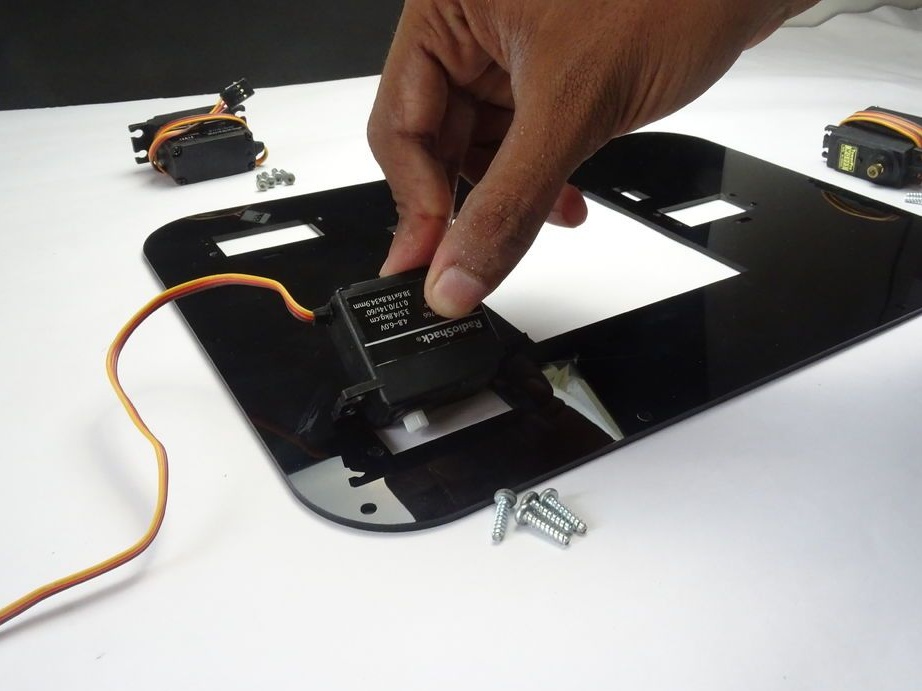
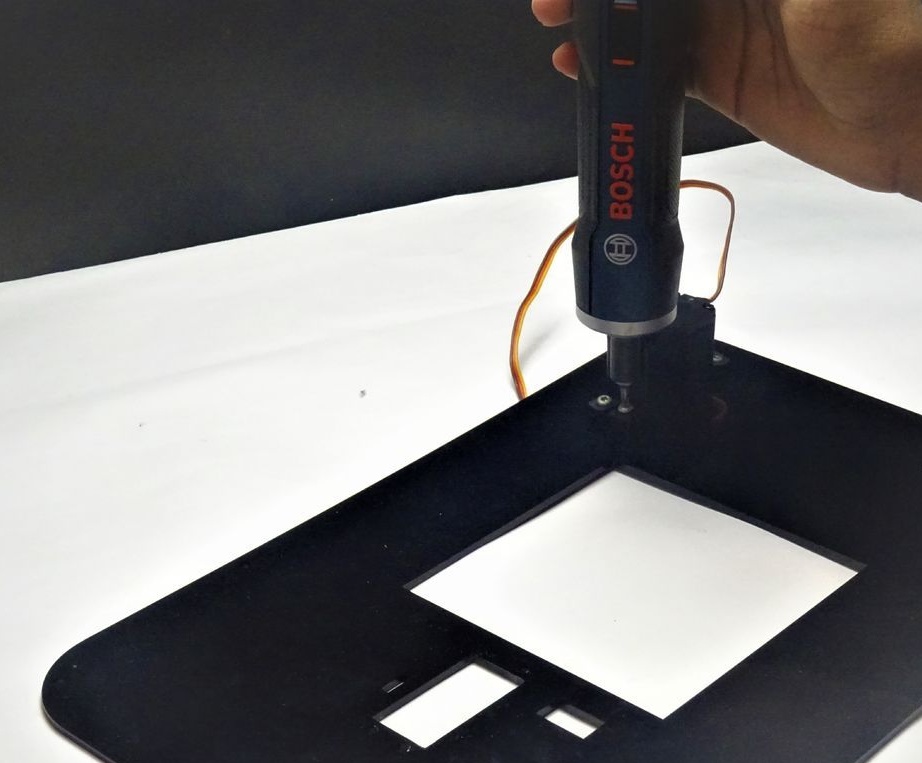
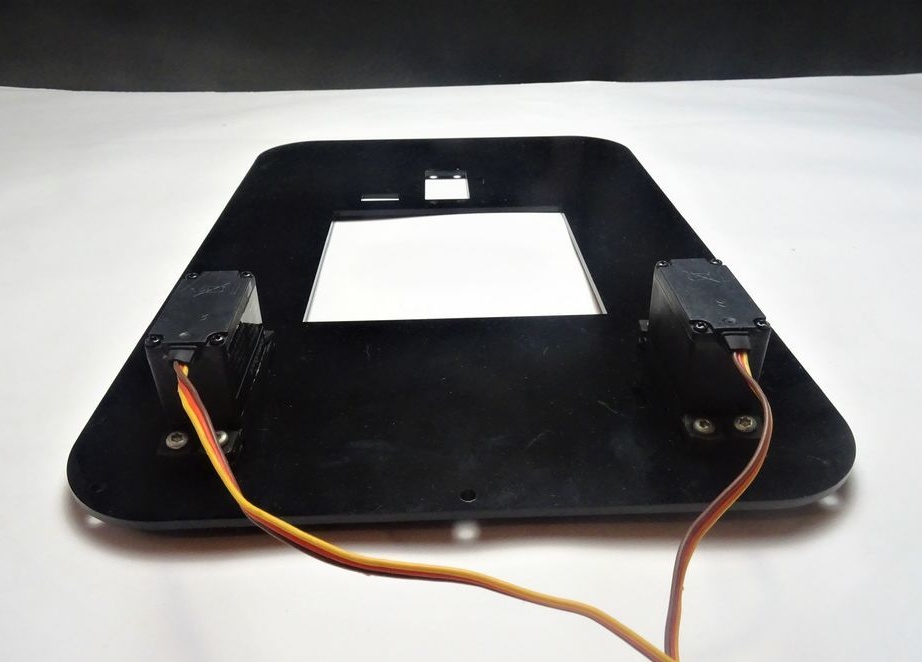
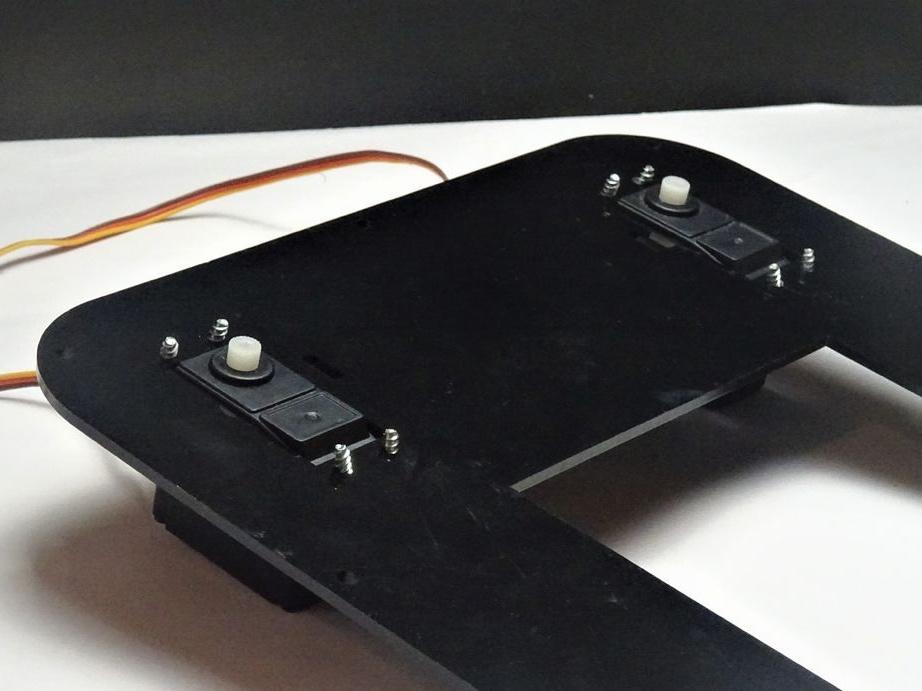
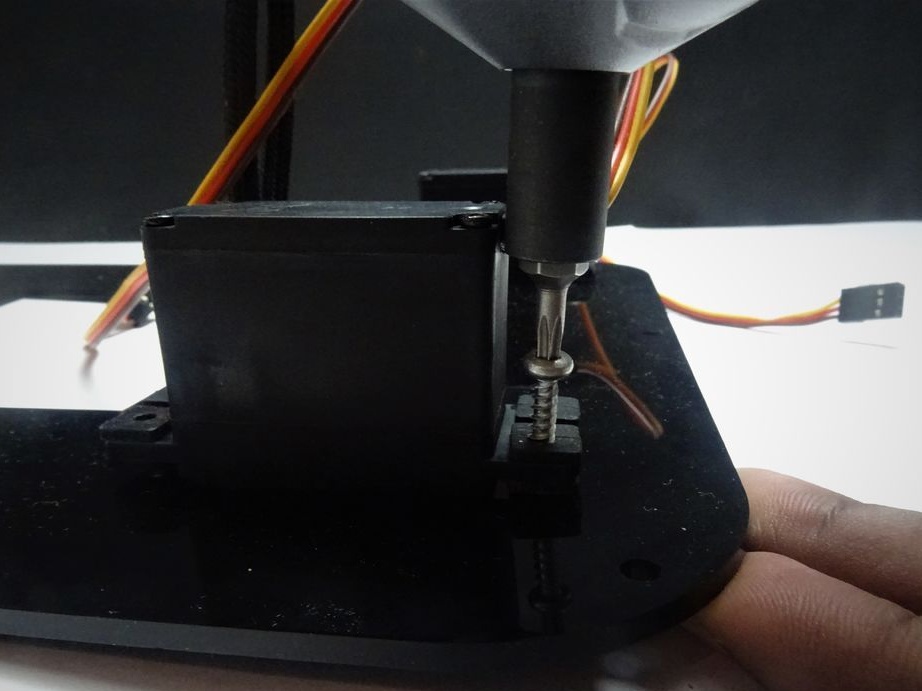
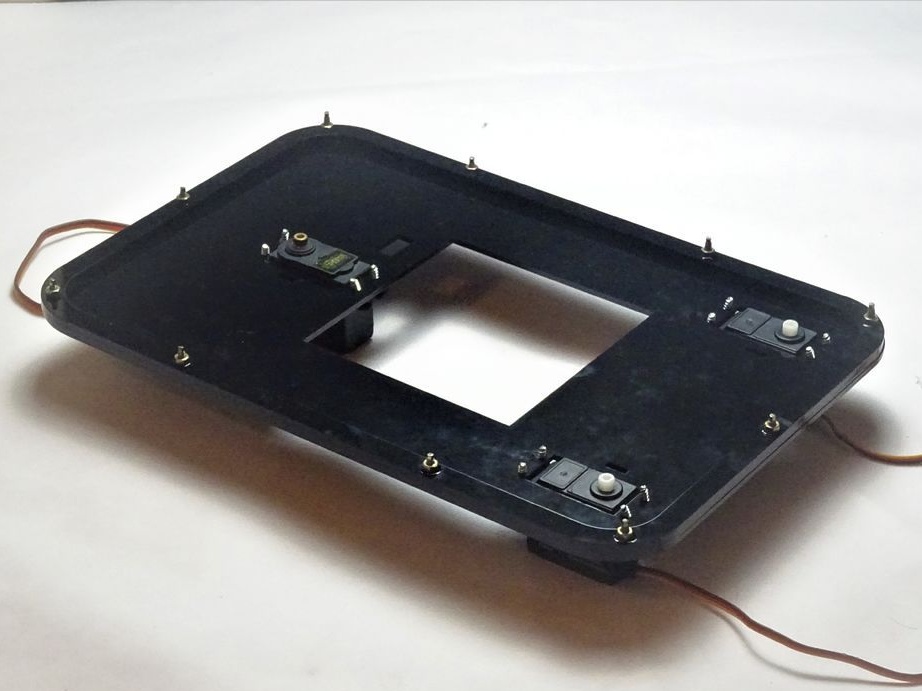
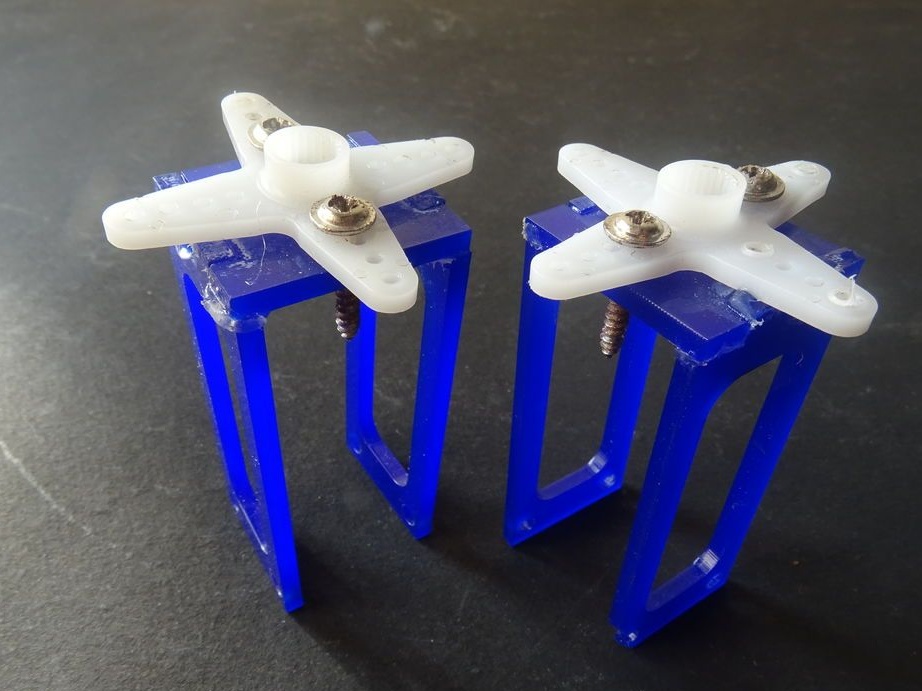
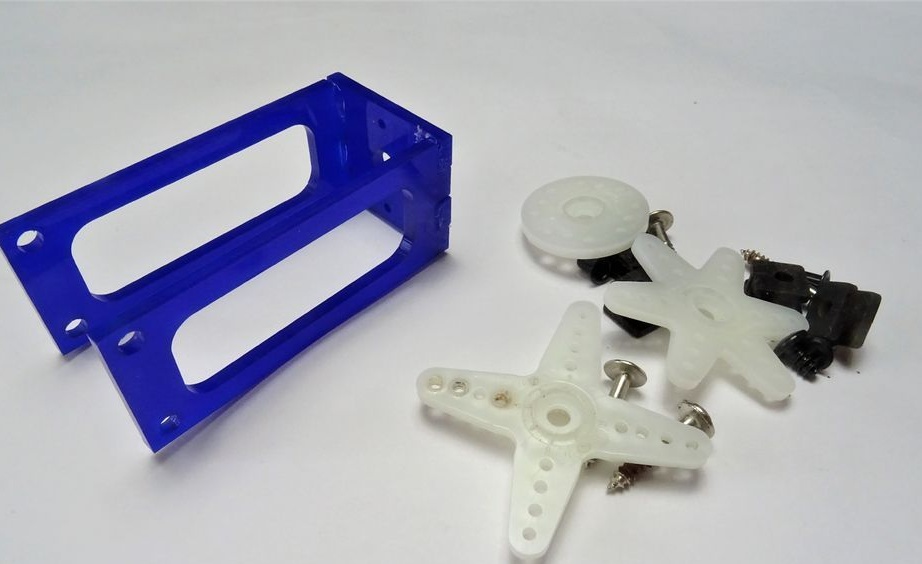
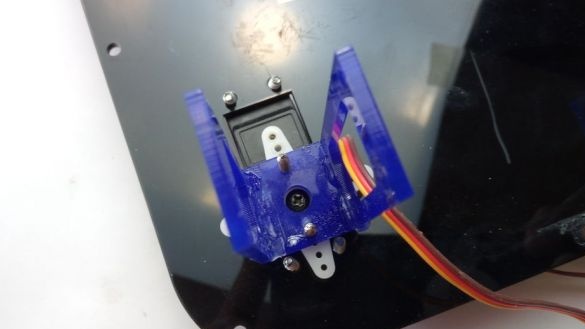
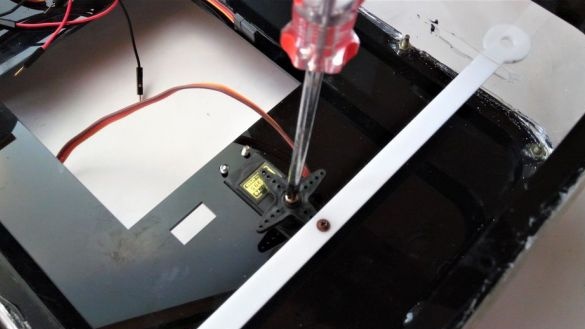
Stap drie: Installeer servomotoren
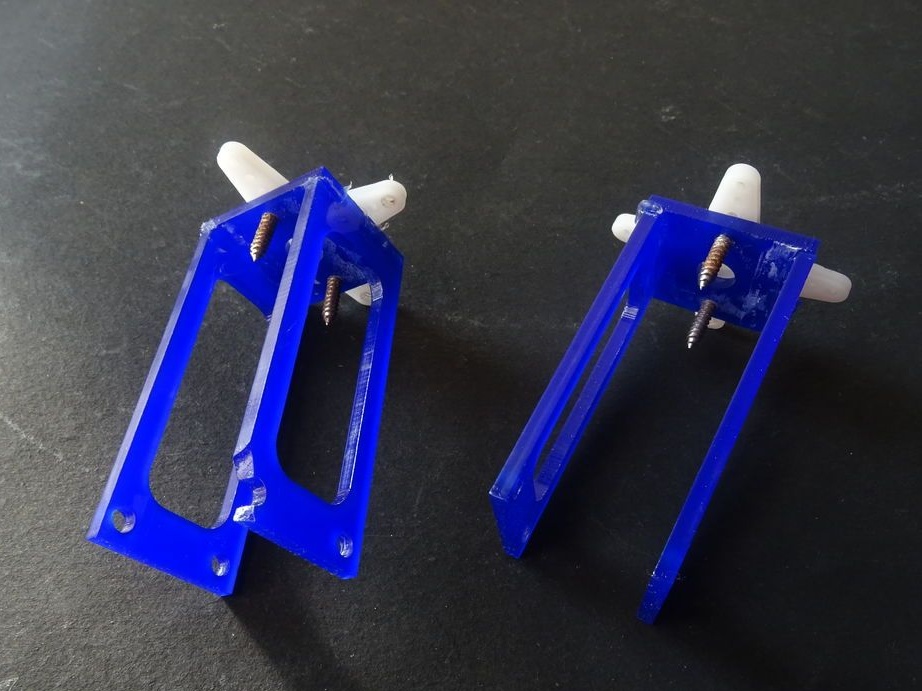
Alle drie de servomotoren zijn op het platform geschroefd. Twee aan de achterkant en een aan de voorkant.

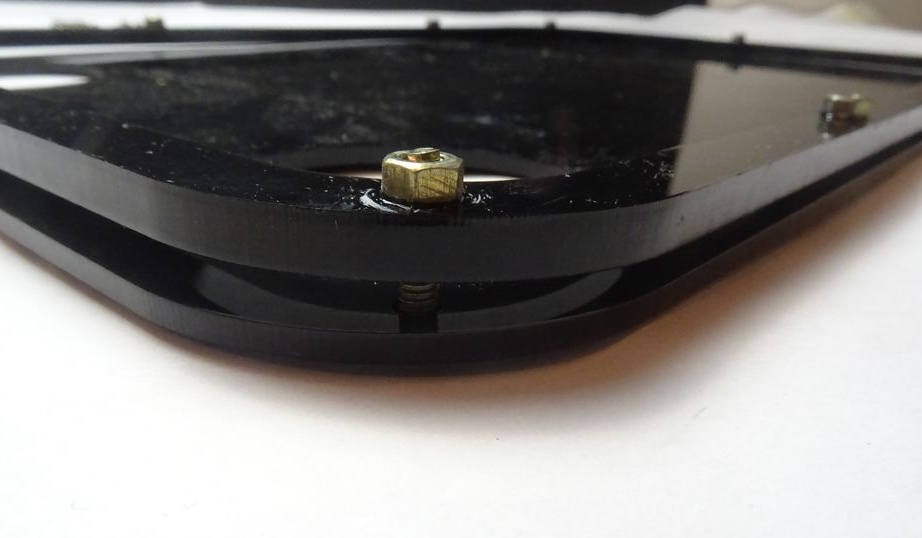
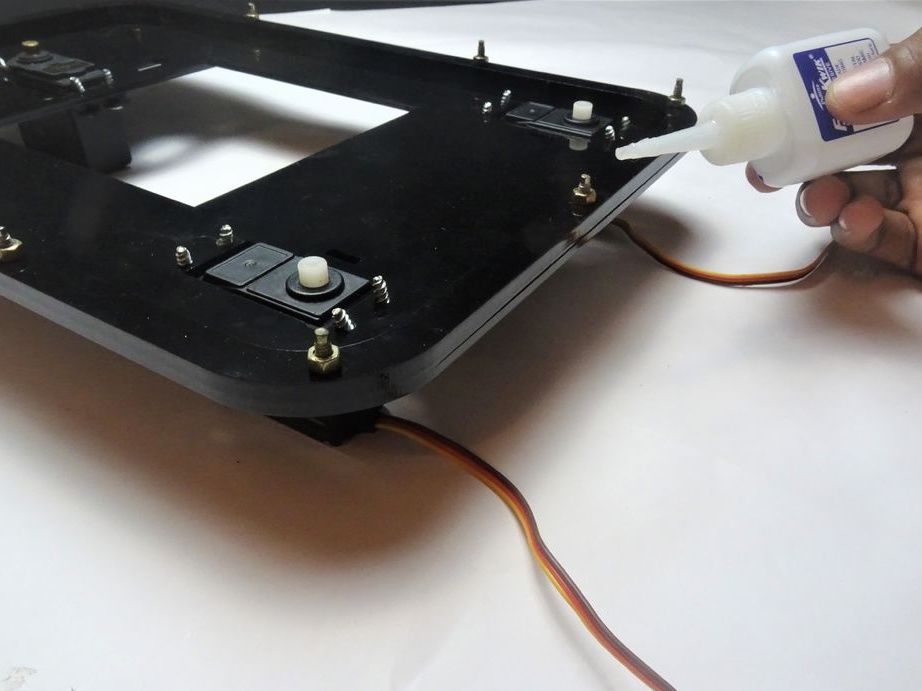
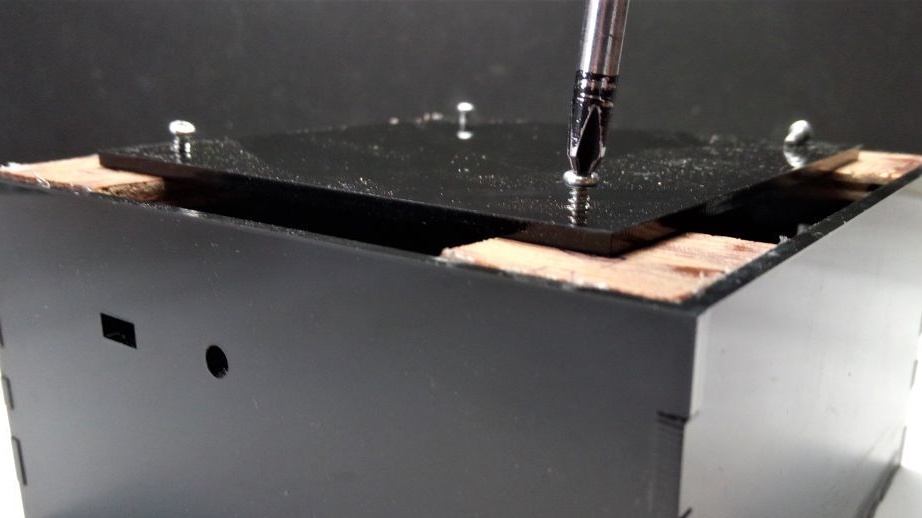
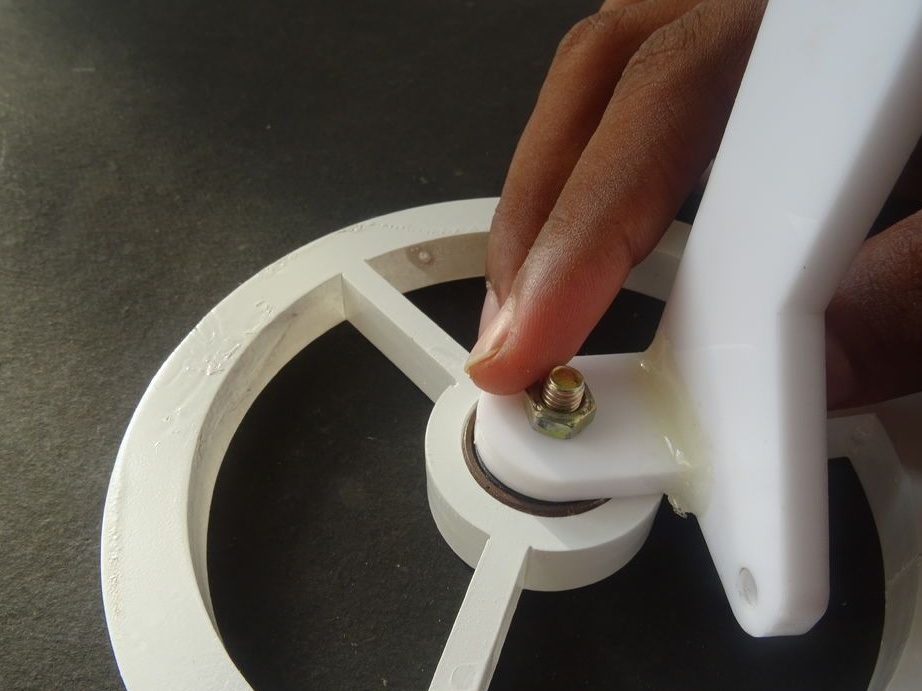
Stap vier: noten
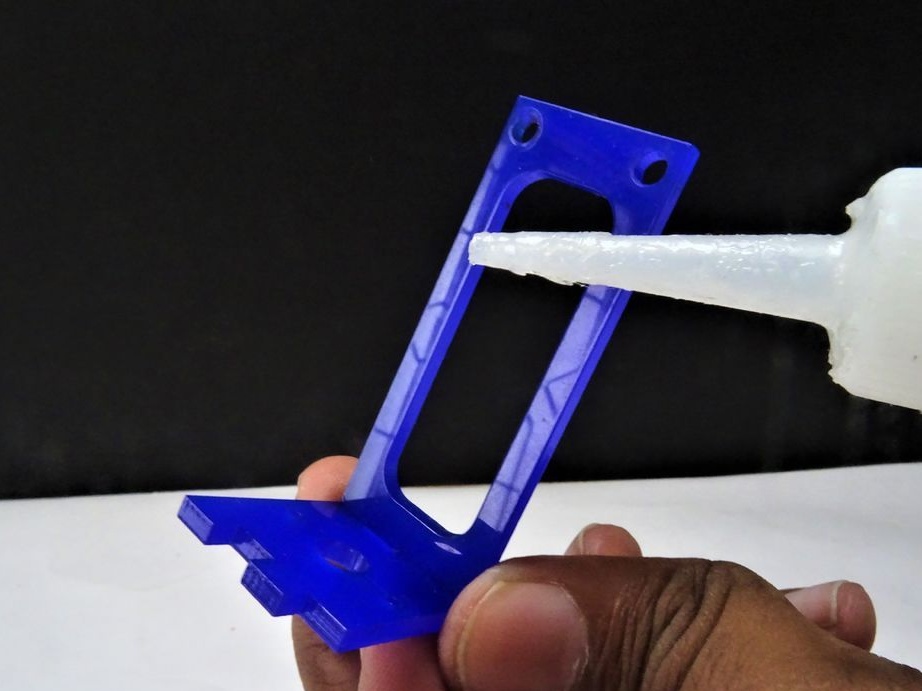
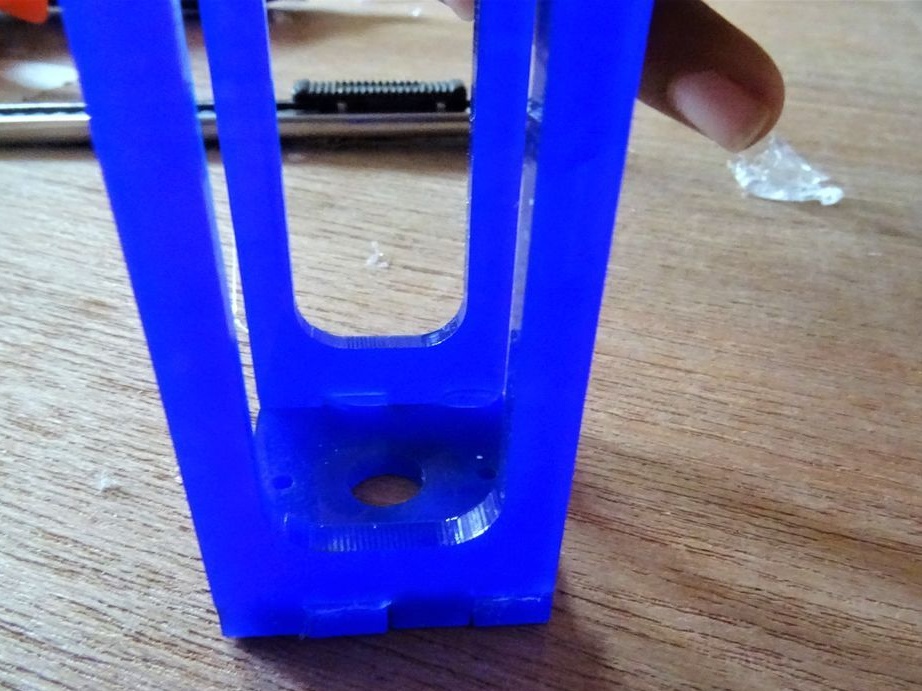
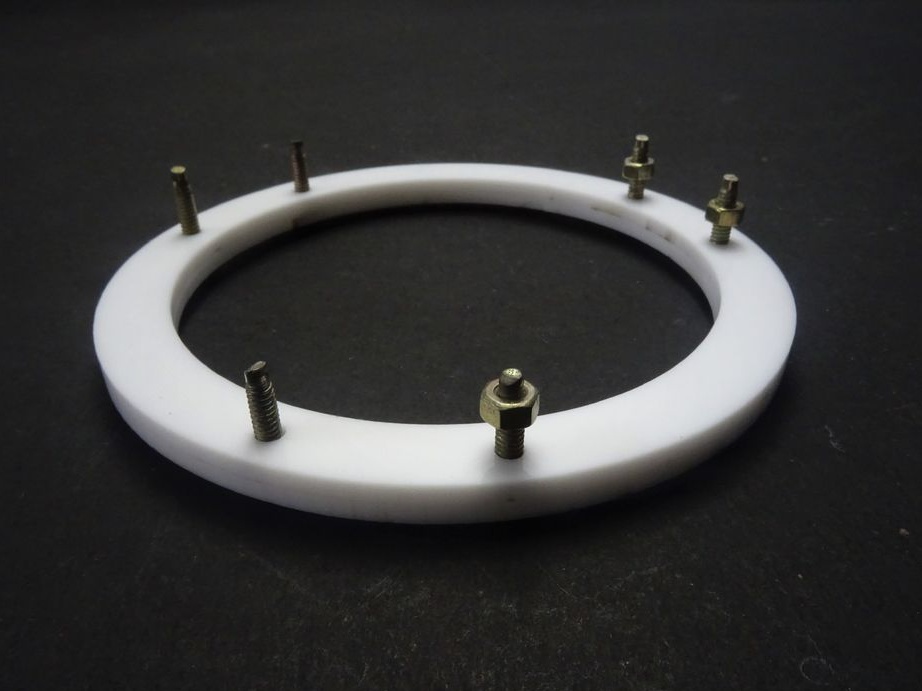
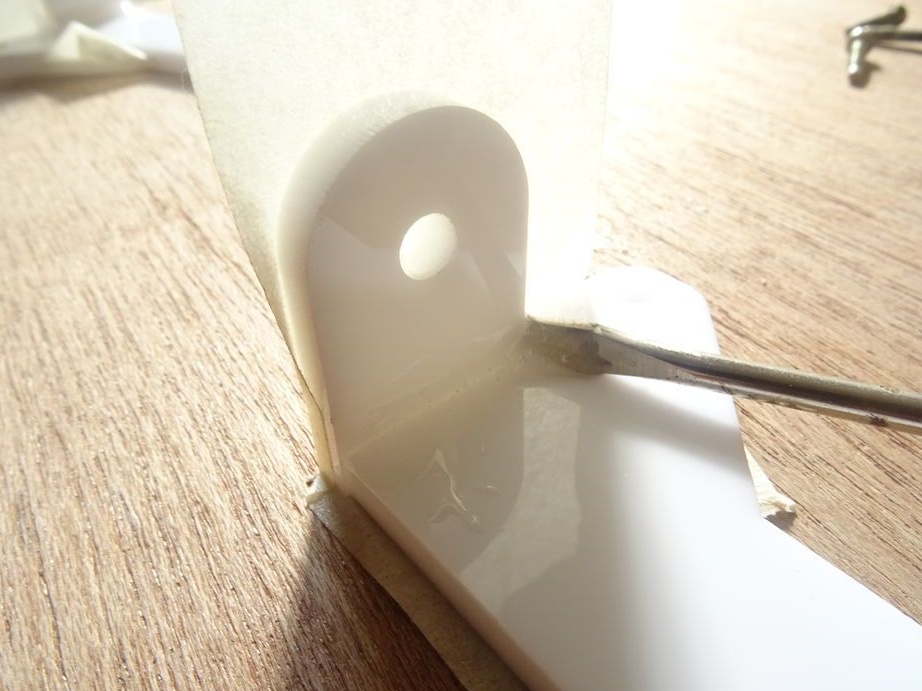
Voor toegang tot de mechanismen worden de bovenste en onderste delen aan elkaar vastgeschroefd. Lijmt de moeren op de superlijm op het frame en versterkt deze vervolgens met epoxy.


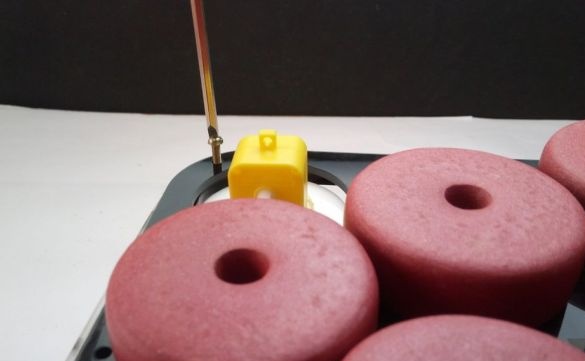
Stap vijf: drijft
Lijm drijft.



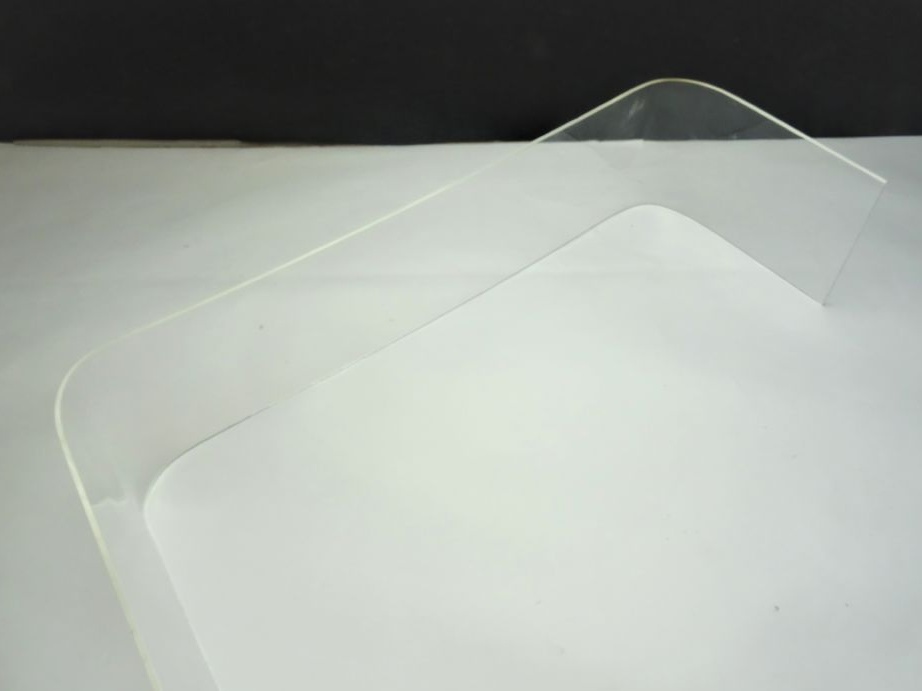
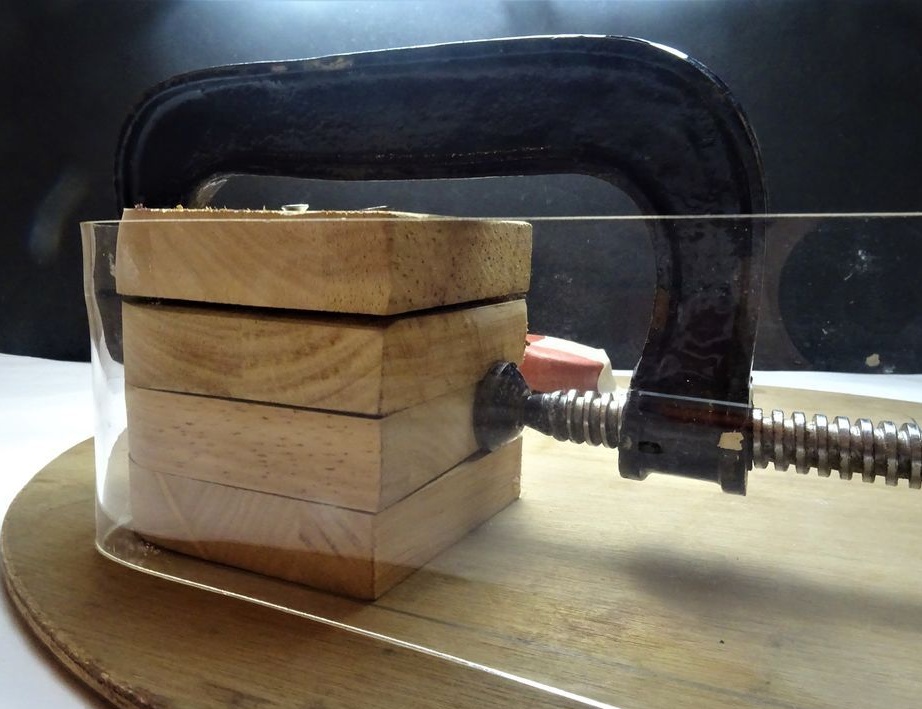
Stap zes: acryl vormen
Om acryl te buigen, maakt een vakman een sjabloon van hout.



Hij klemt het onderdeel vast met een klem en verwarmt het met een haardroger om het onderdeel de gewenste vorm te geven.





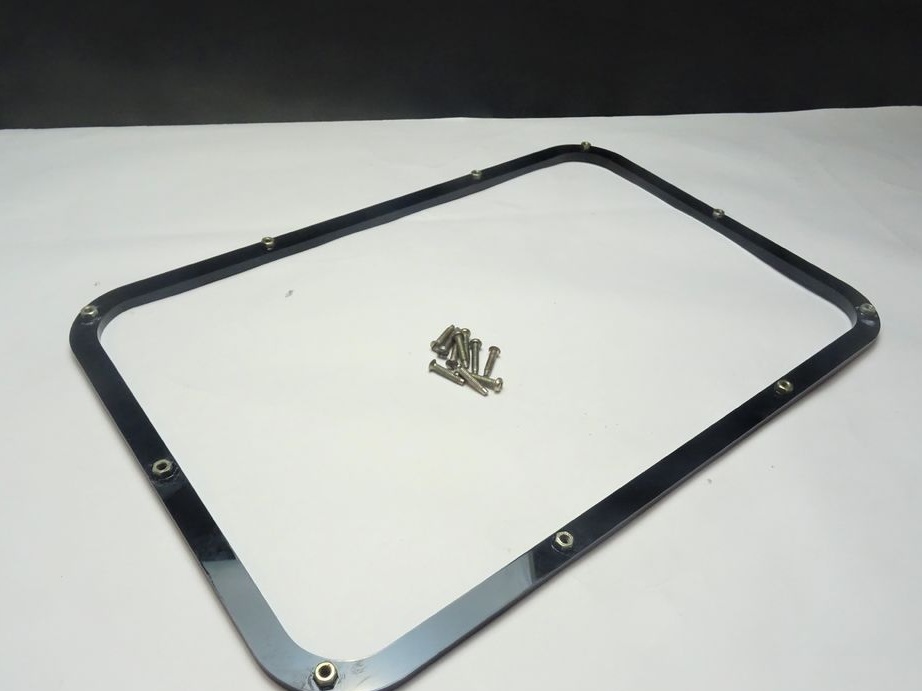
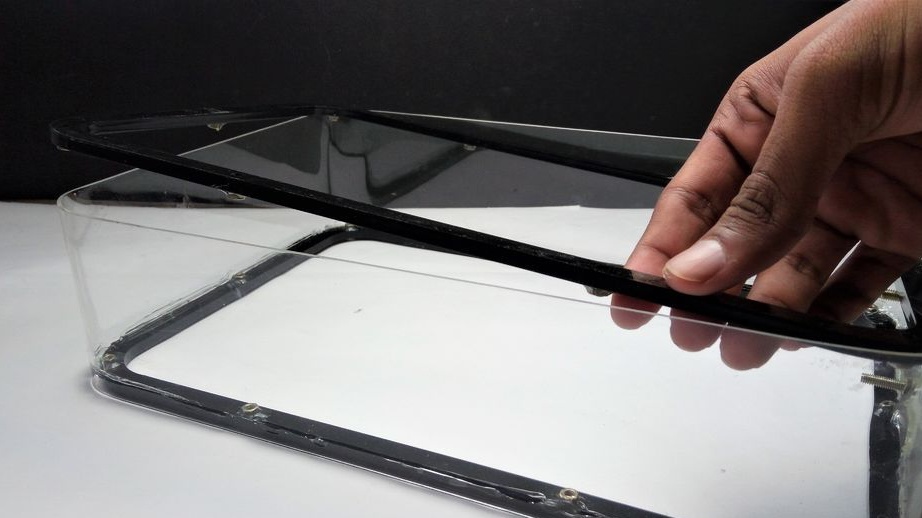
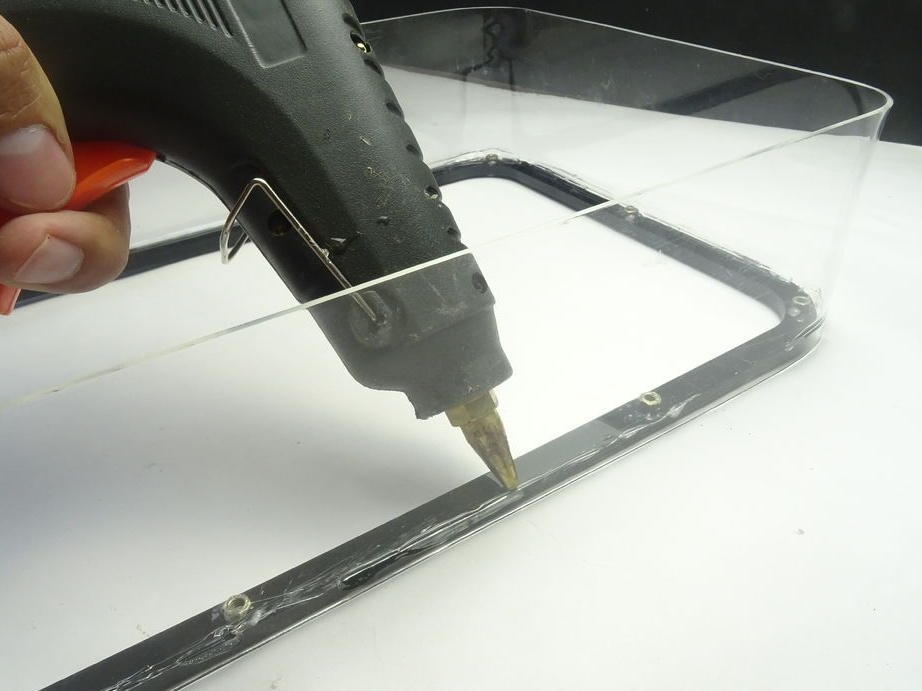
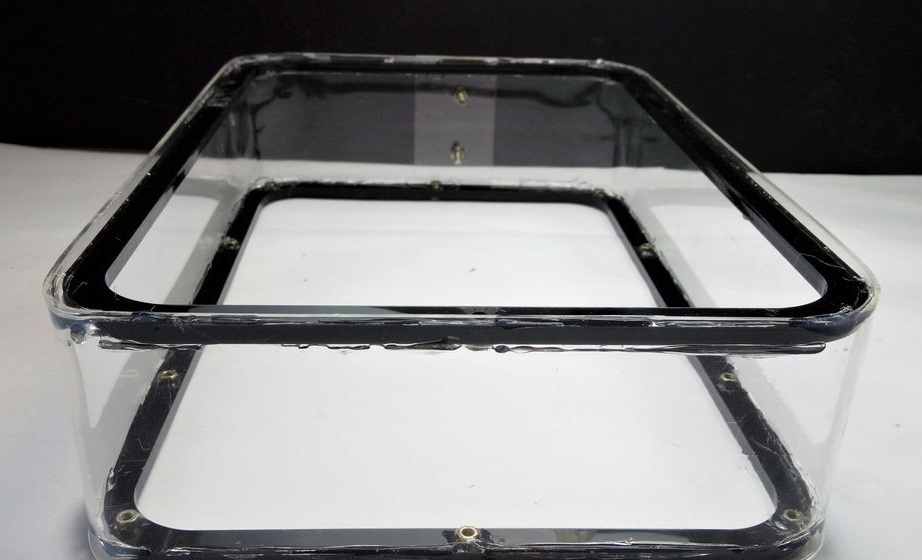
Zevende stap: kader
Lijmt de bovenste en onderste frames op het transparante lichaam. De naden zijn zorgvuldig geseald met hete lijm.







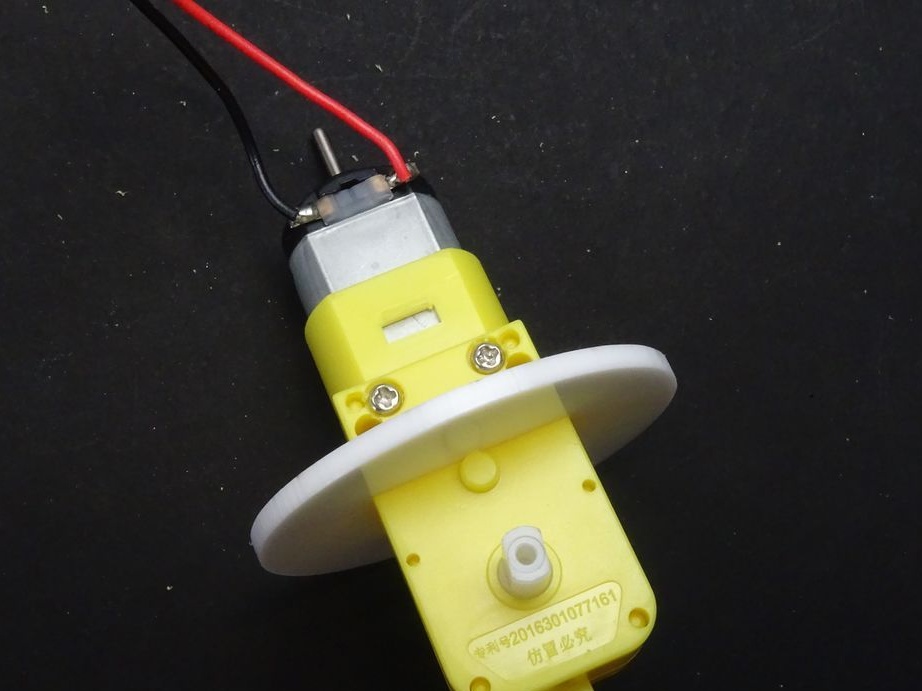
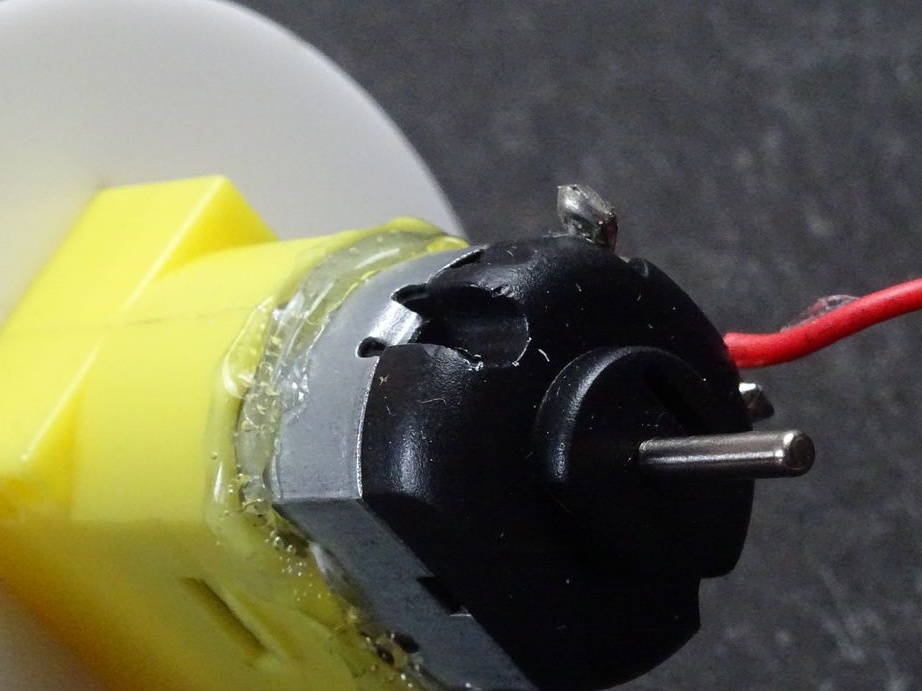
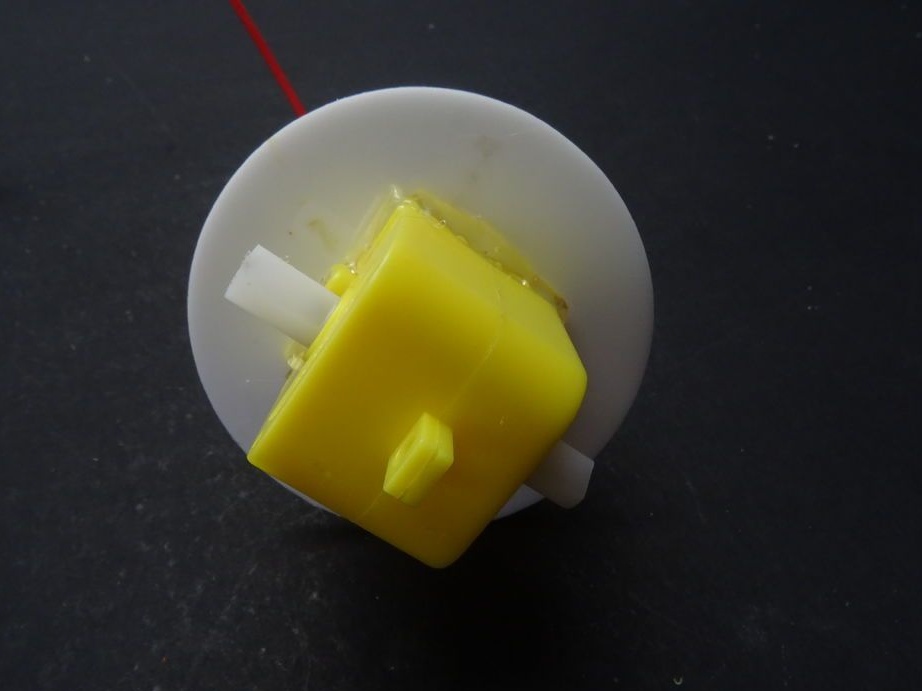
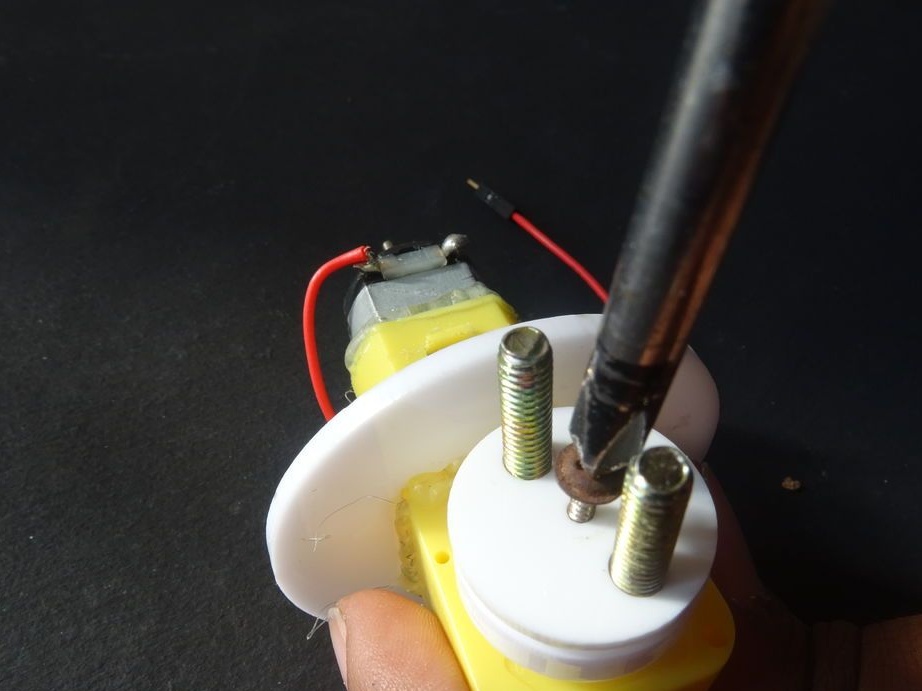
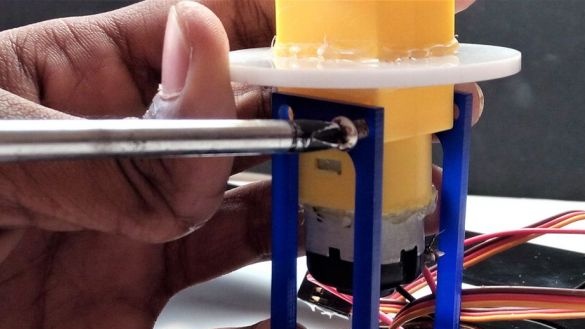
Stap acht: Engine Tuning
Nu moet u de motorbehuizing verwerken om er onderdelen op te installeren.
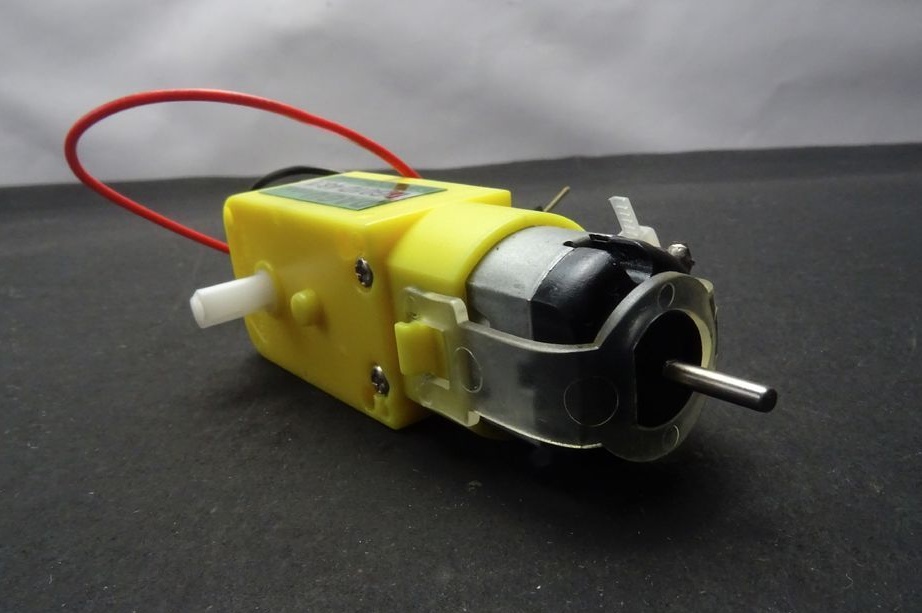
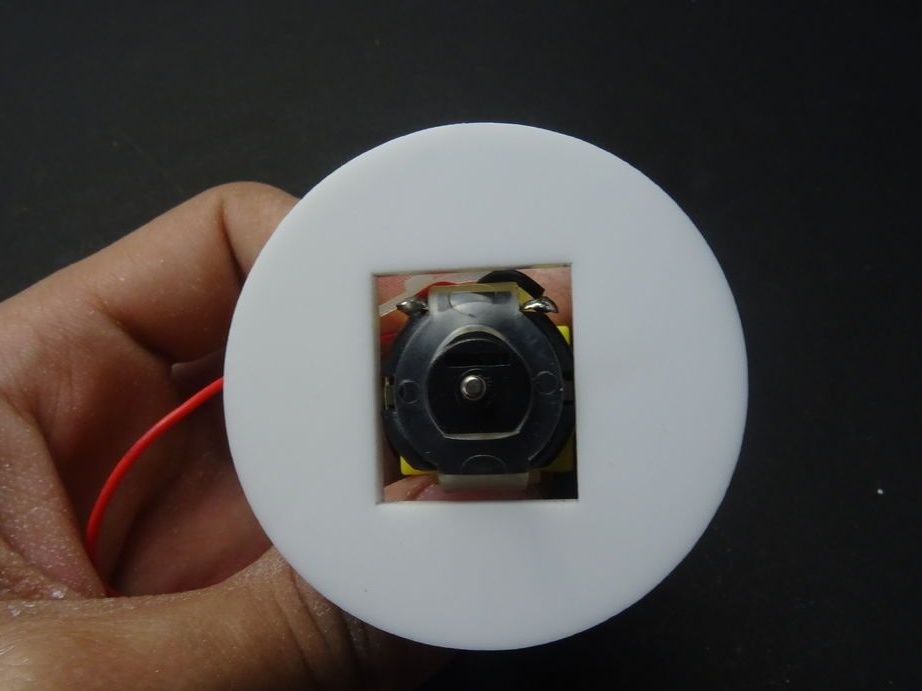
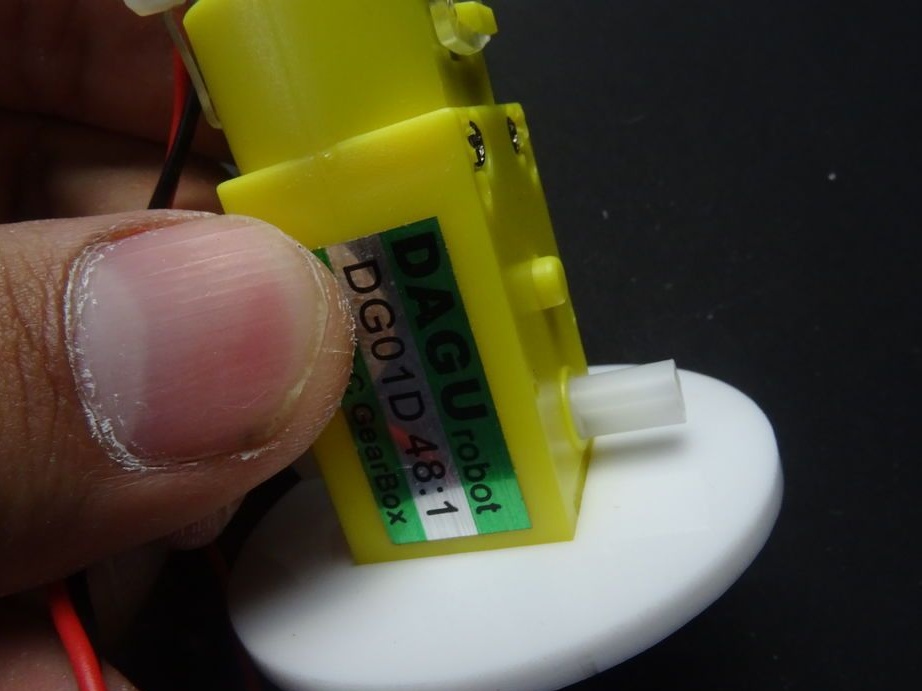

Snijdt alle uitstekende delen van het lichaam af, tot aan de sticker.
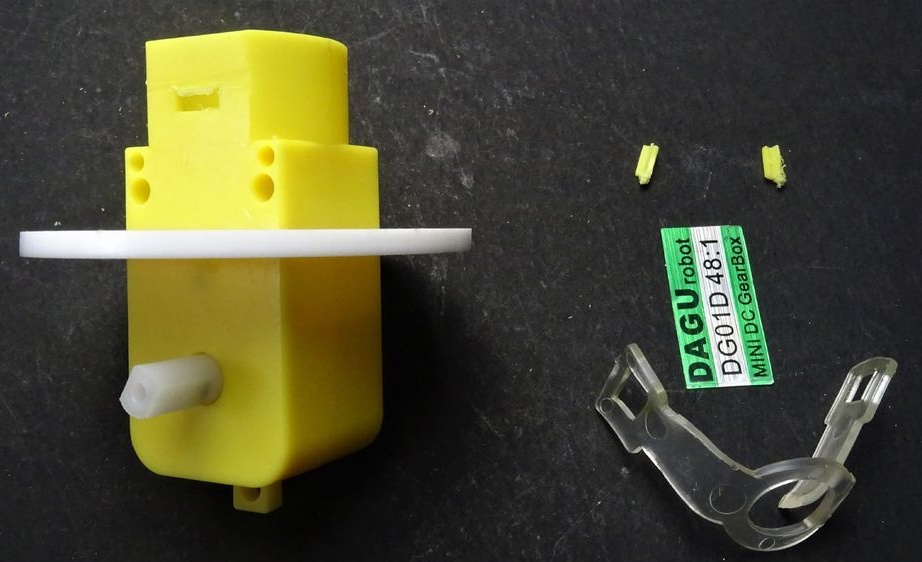

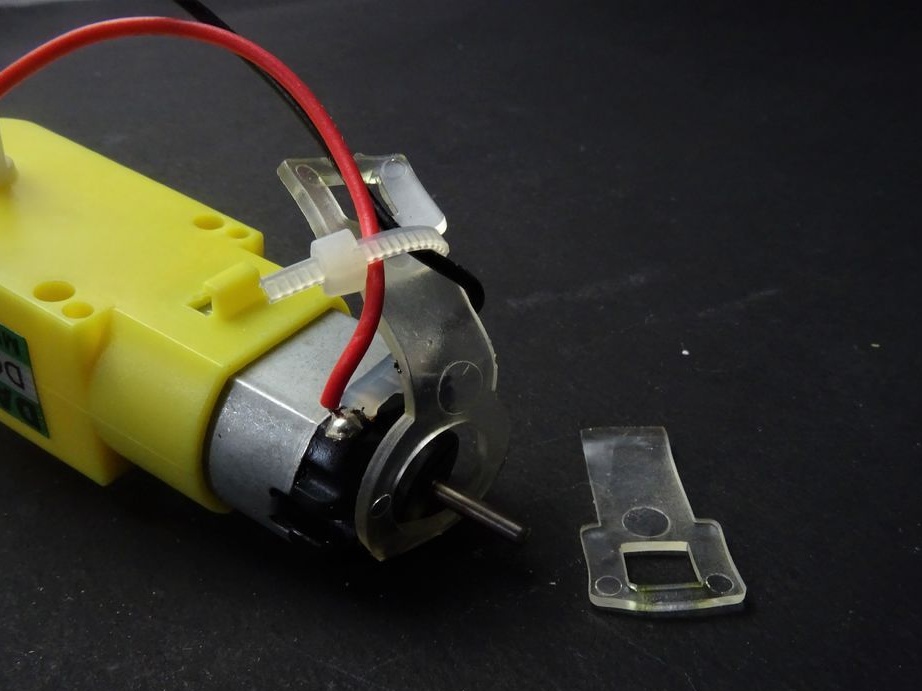
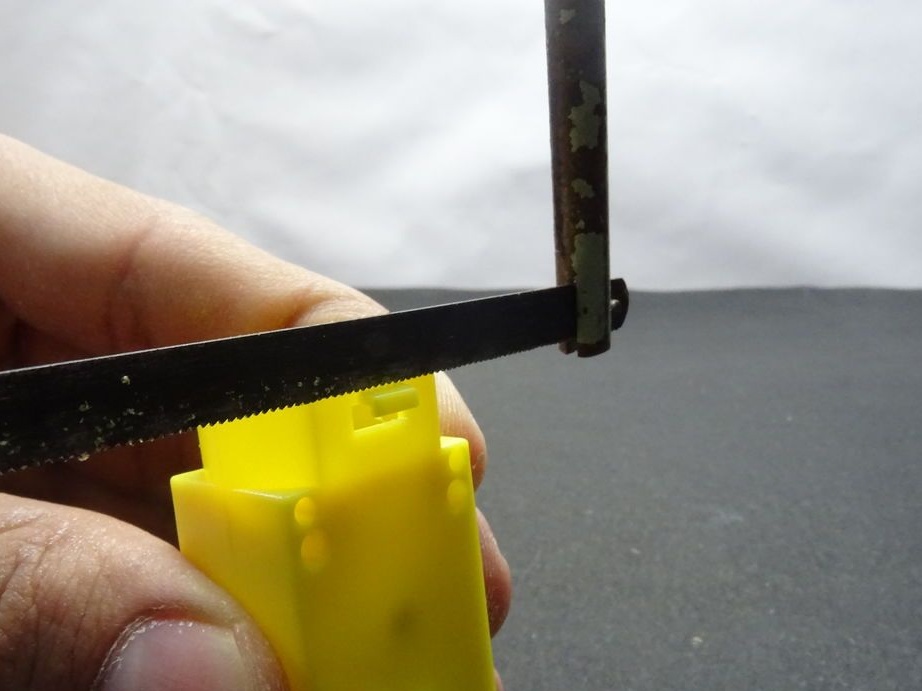


Installeert het onderdeel op het lichaam en lijmt het. Omdat het nodig was om de motorsteun (vergrendelingen) af te snijden, wordt de motor ook met lijm vastgezet.


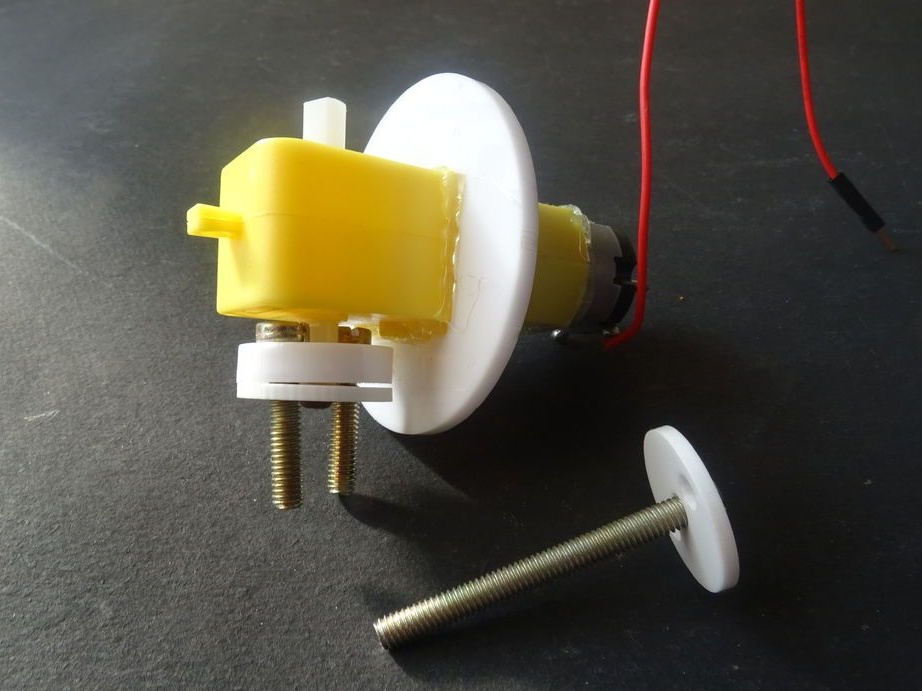
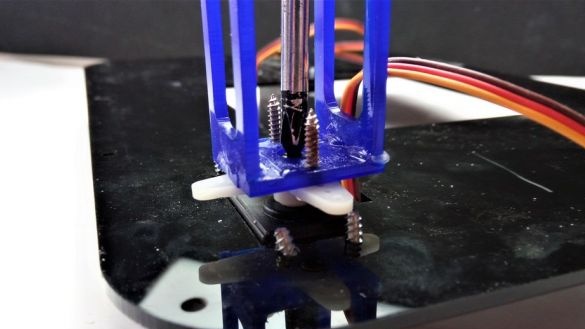
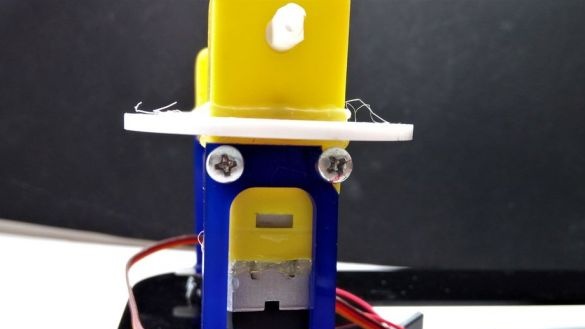
Stap negen: draaimechanisme
Monteert een roterende behuizing. Er wordt een motor in geïnstalleerd en deze wordt aangesloten op de servo-aandrijving.
Lijmt de zaak.

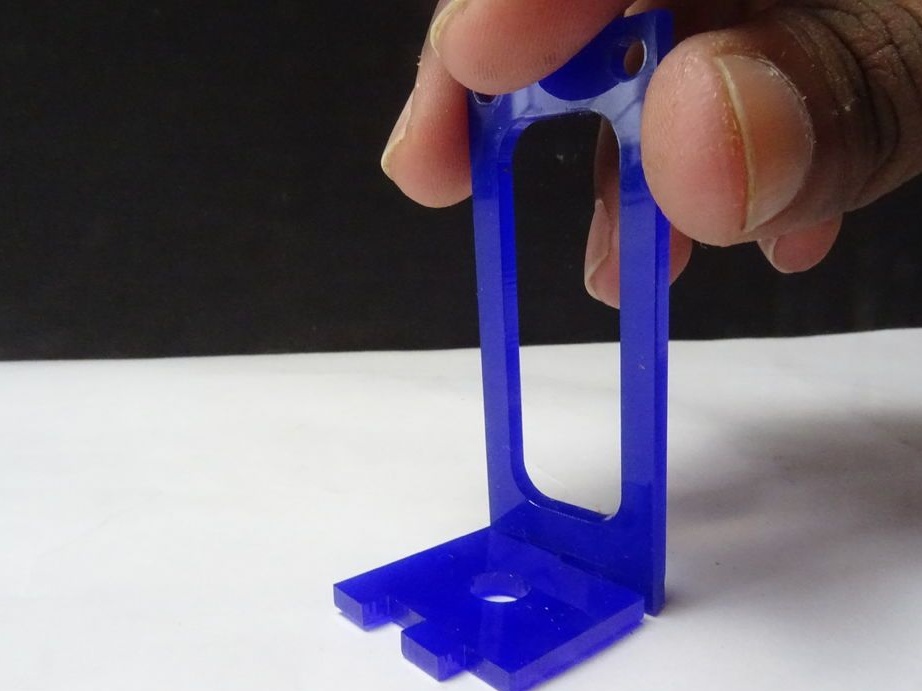

Schroeven op de koppeling.


Stap tien: schilderen
Omdat de meester geen wit acryl van de vereiste dikte had, werden de wielen en velg uit transparant acryl gesneden en vervolgens wit geverfd.




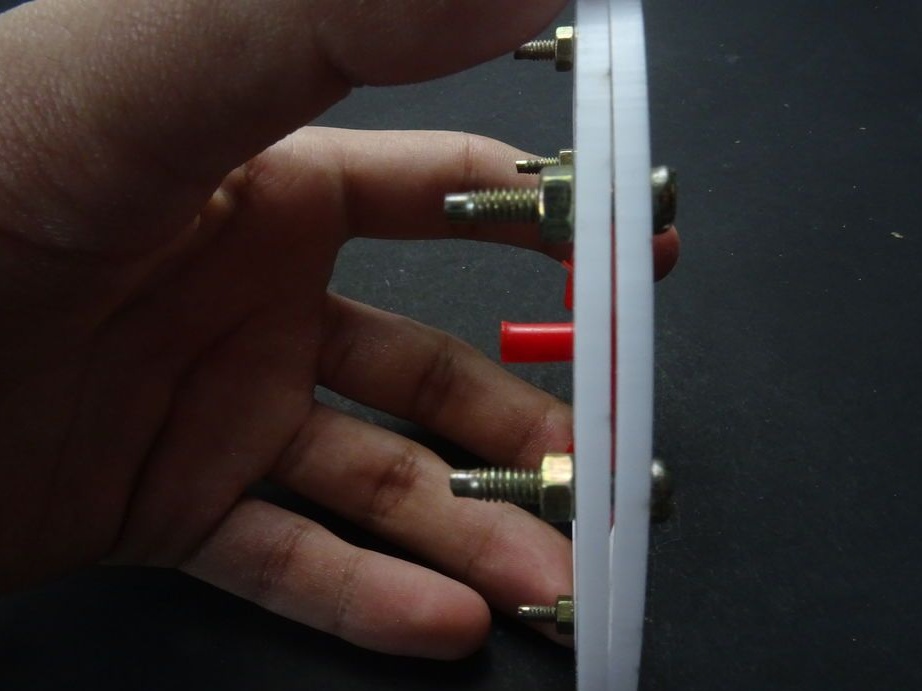
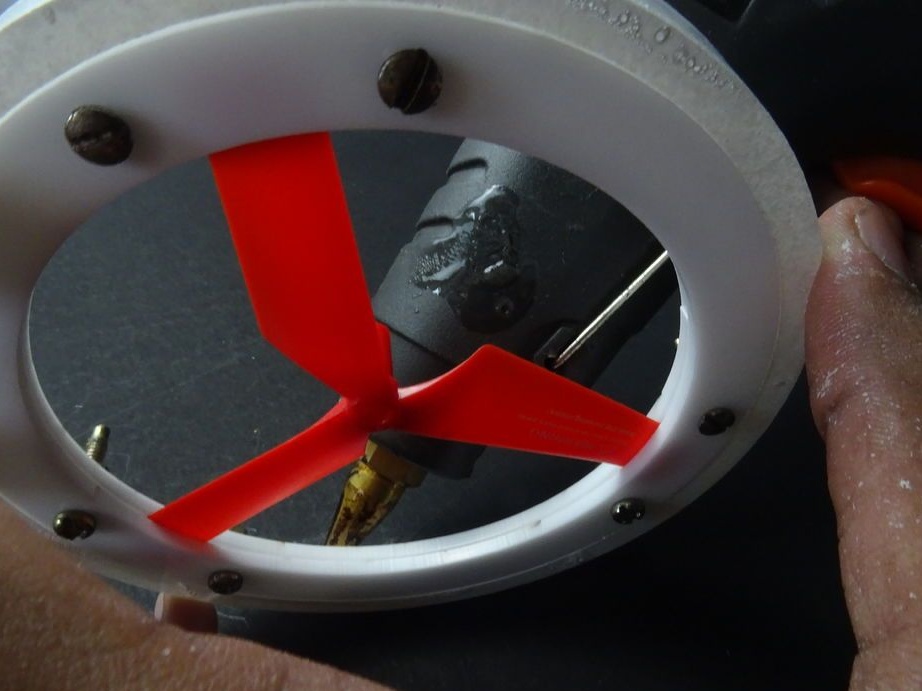
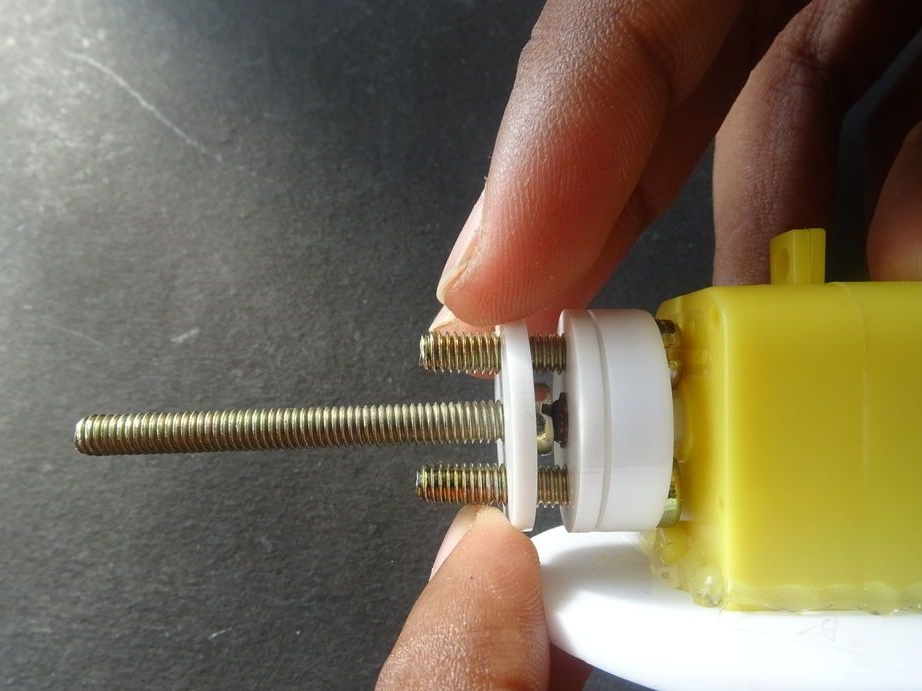
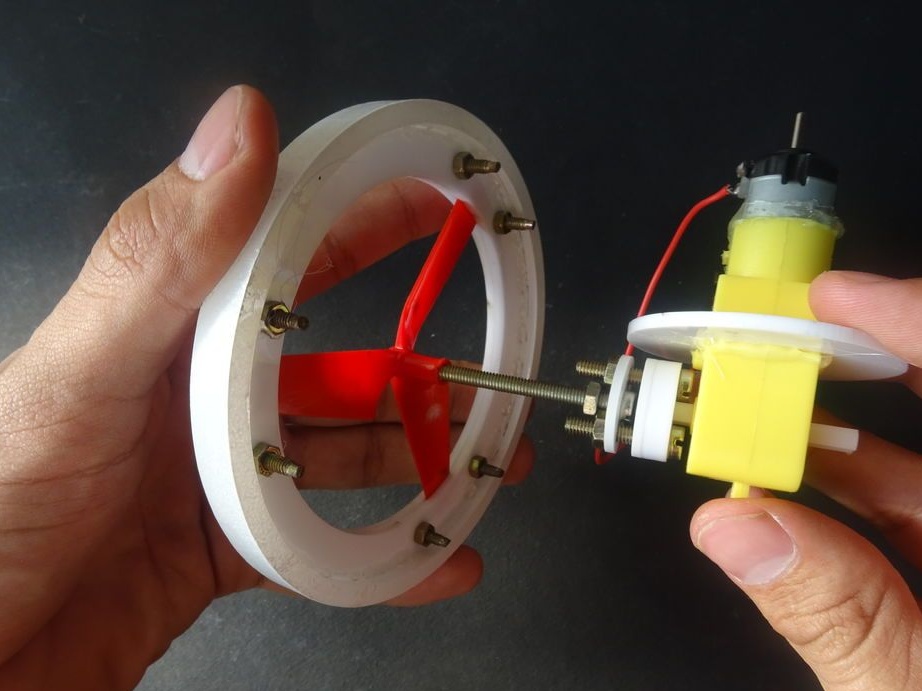
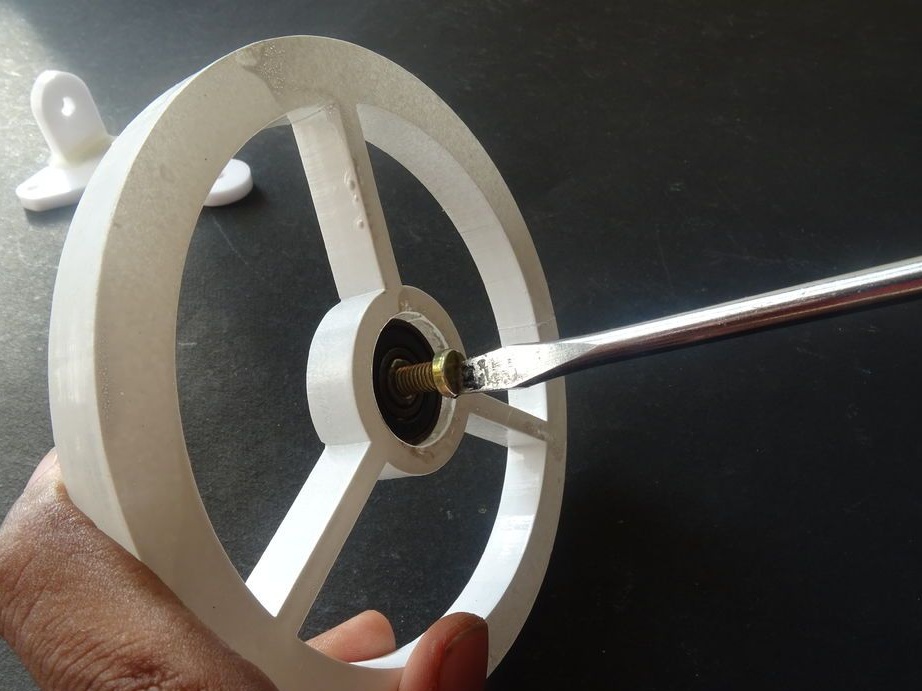
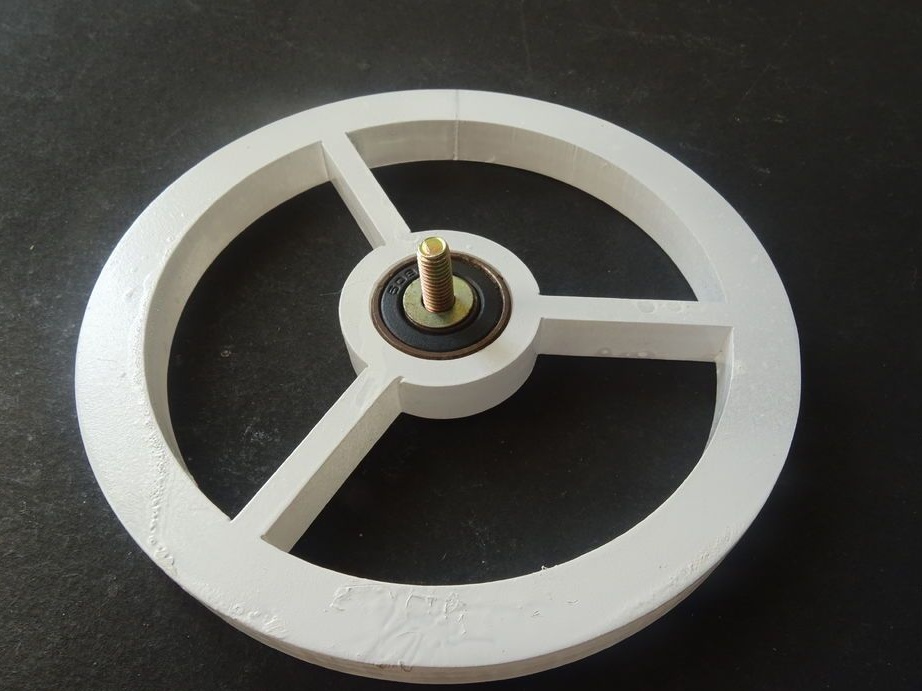
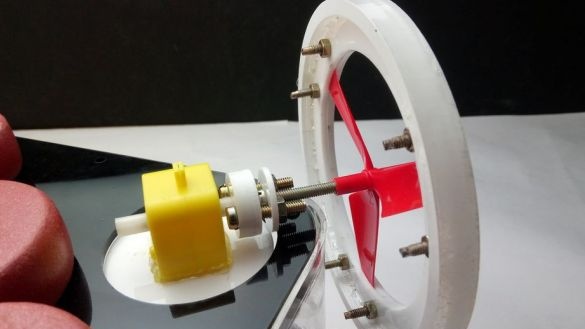
Stap elf: wielmontage
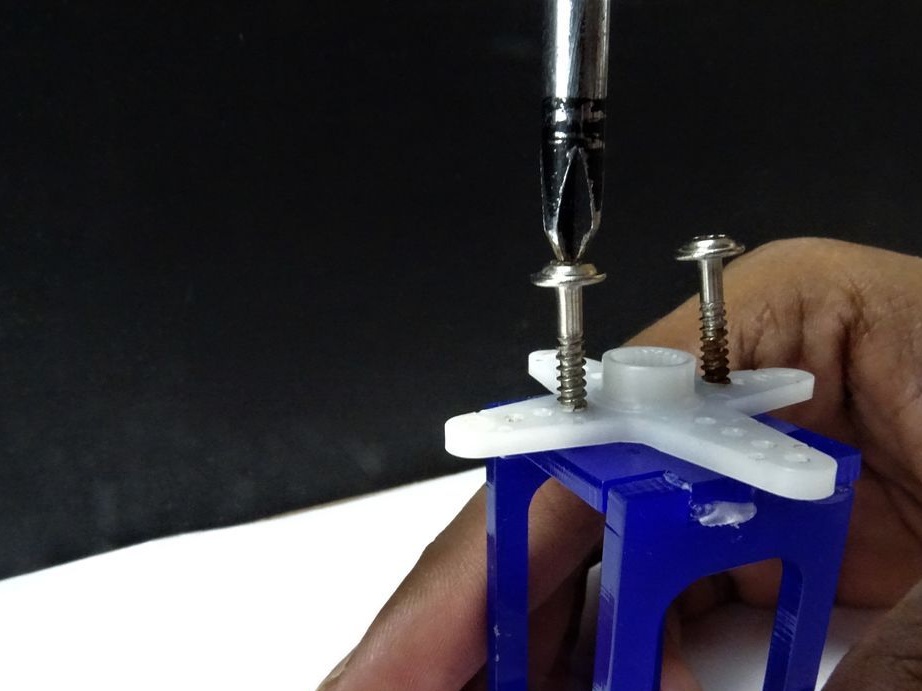
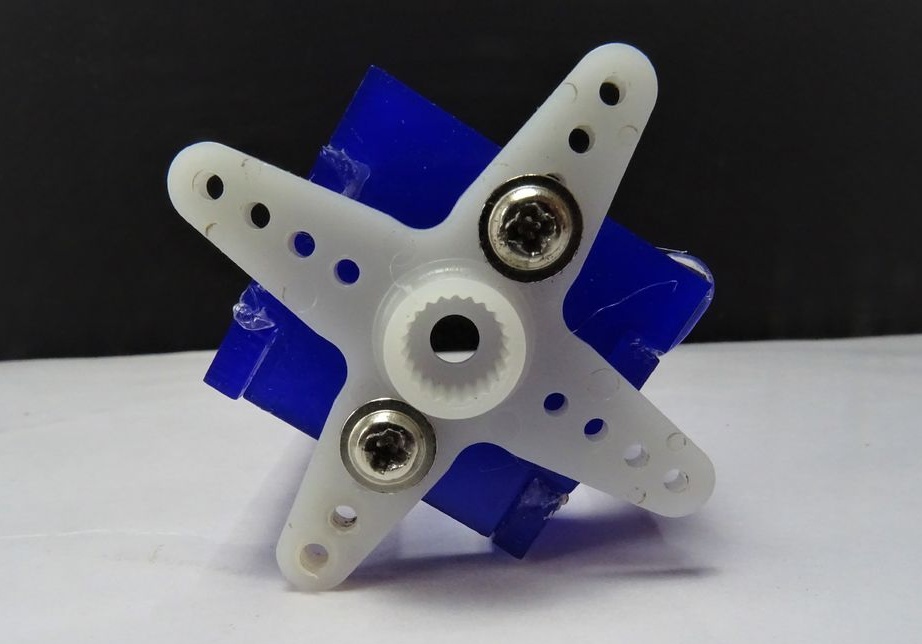
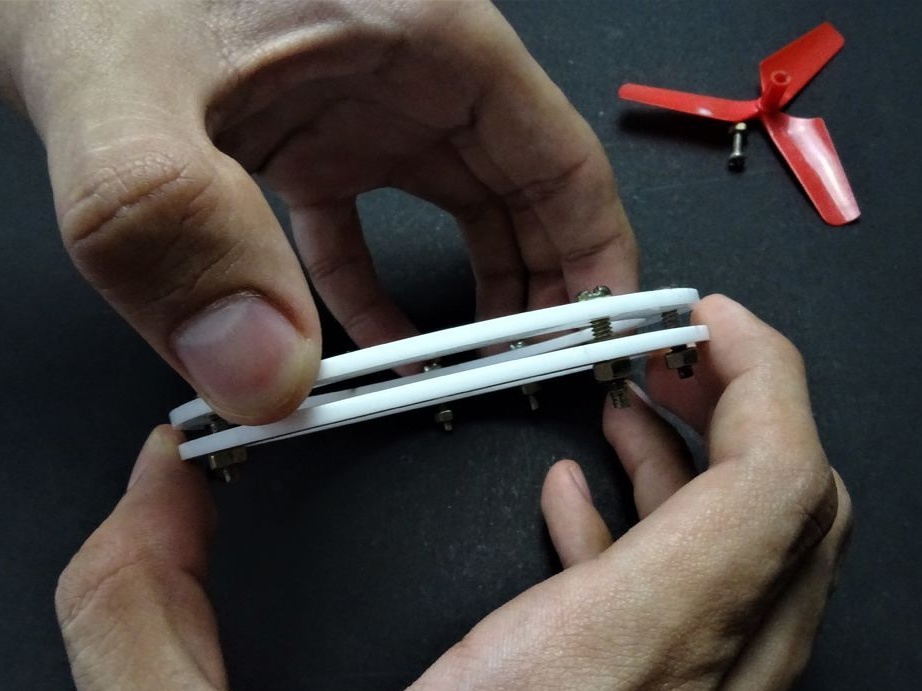
Op bouten worden twee wielvelgen verzameld. De schroeven zijn niet volledig vastgedraaid.




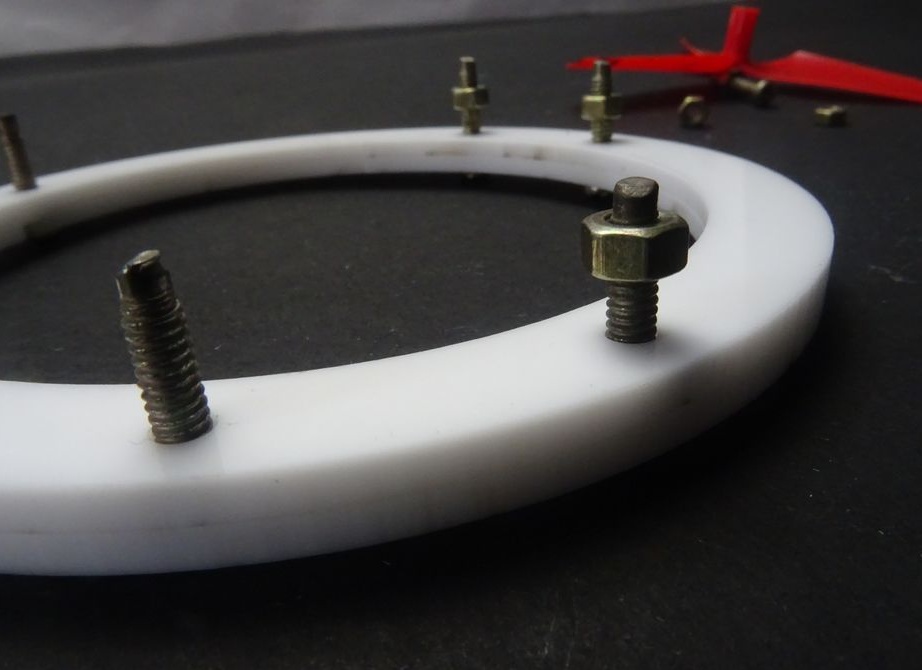
Tussen de schijven worden schroeven geïnstalleerd en worden de schroeven vastgedraaid. Bij het installeren van de schroef moet u de sjabloon gebruiken om deze te centreren.
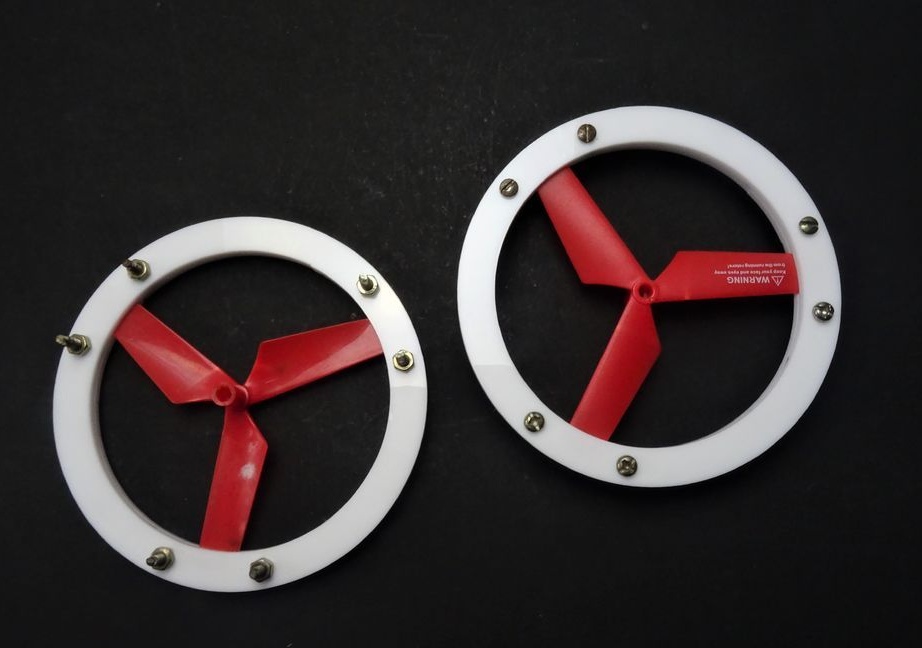
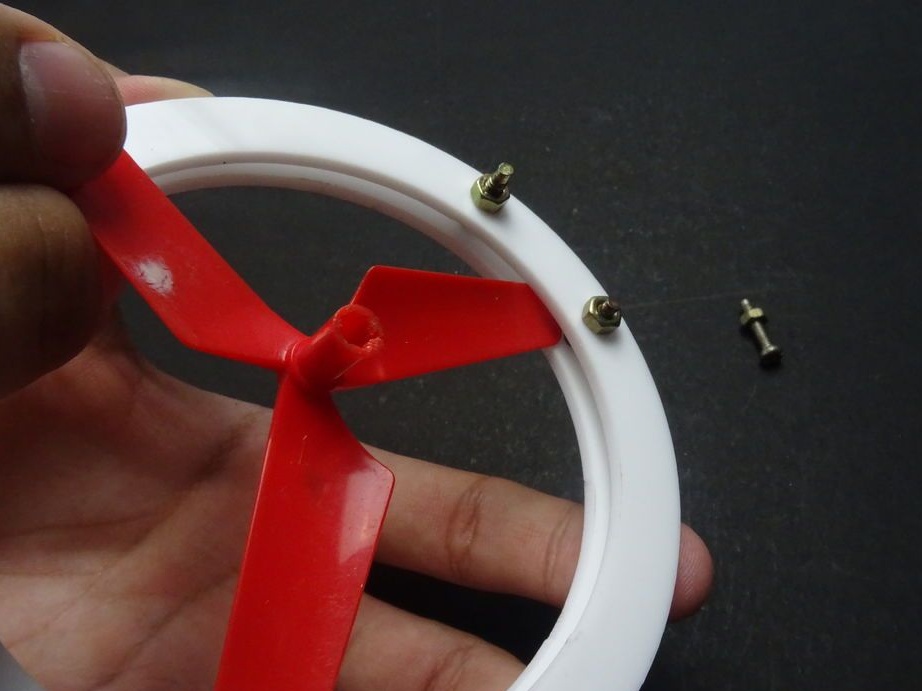
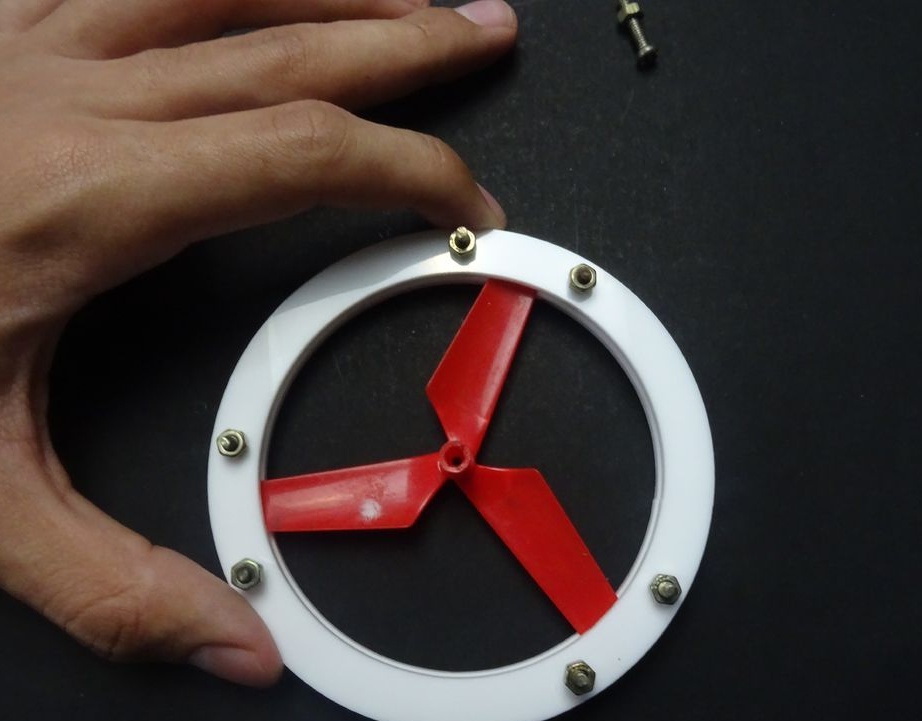

Stelt de buitenrand van het wiel in. De velg moet gelijk liggen met de interne schijf.
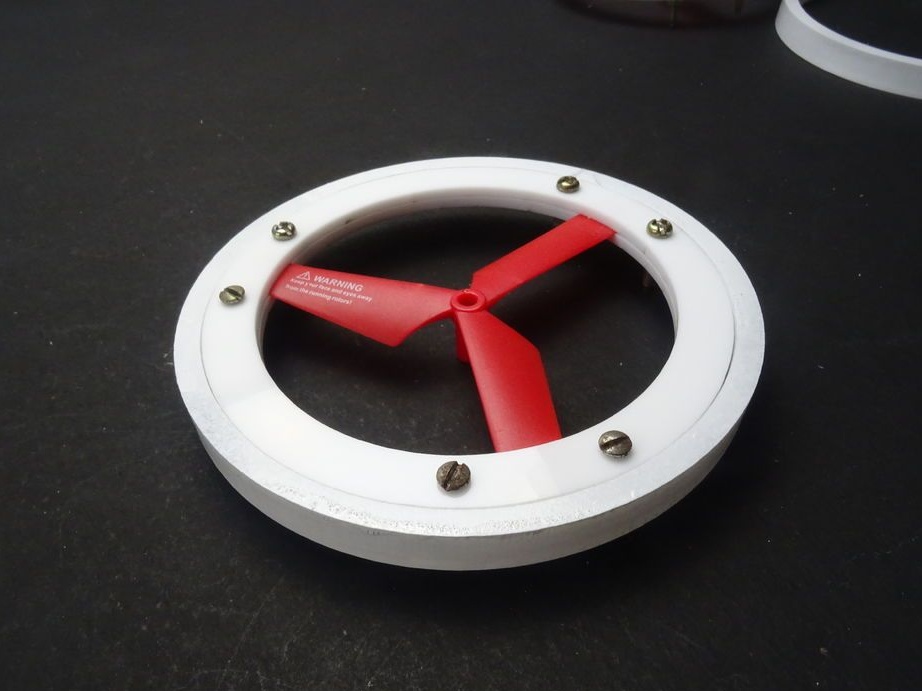

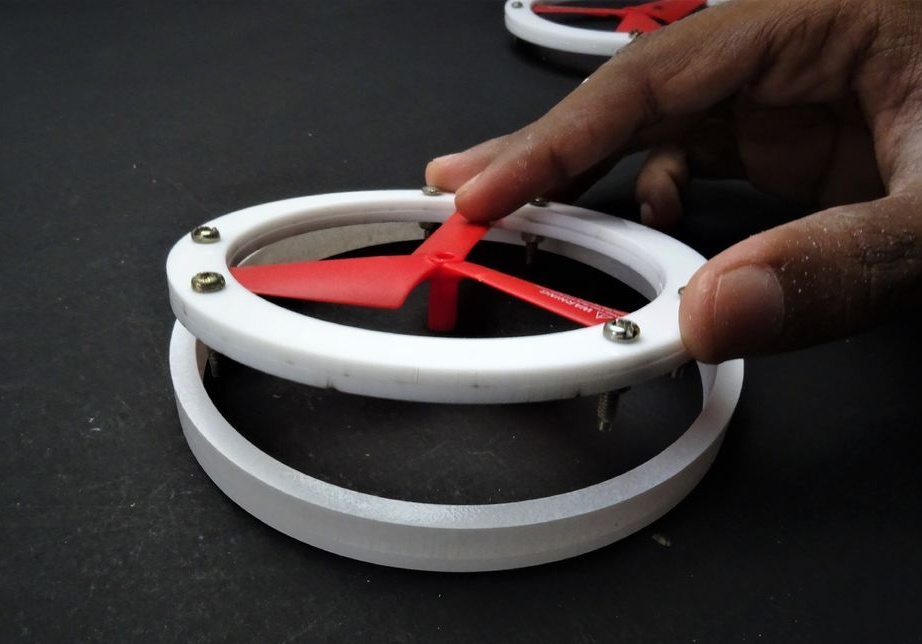
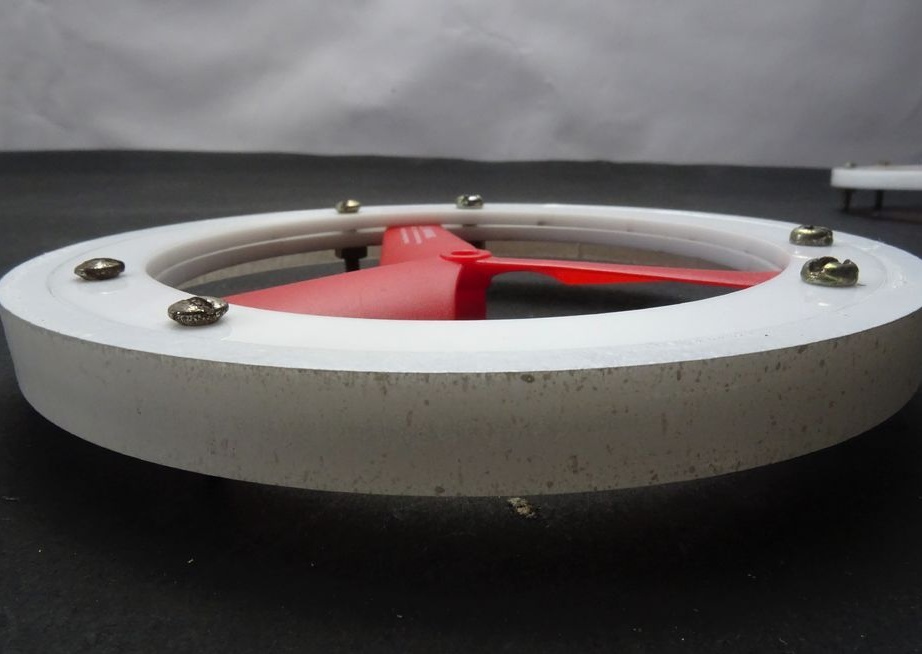

Breng hete lijm aan op de voeg.


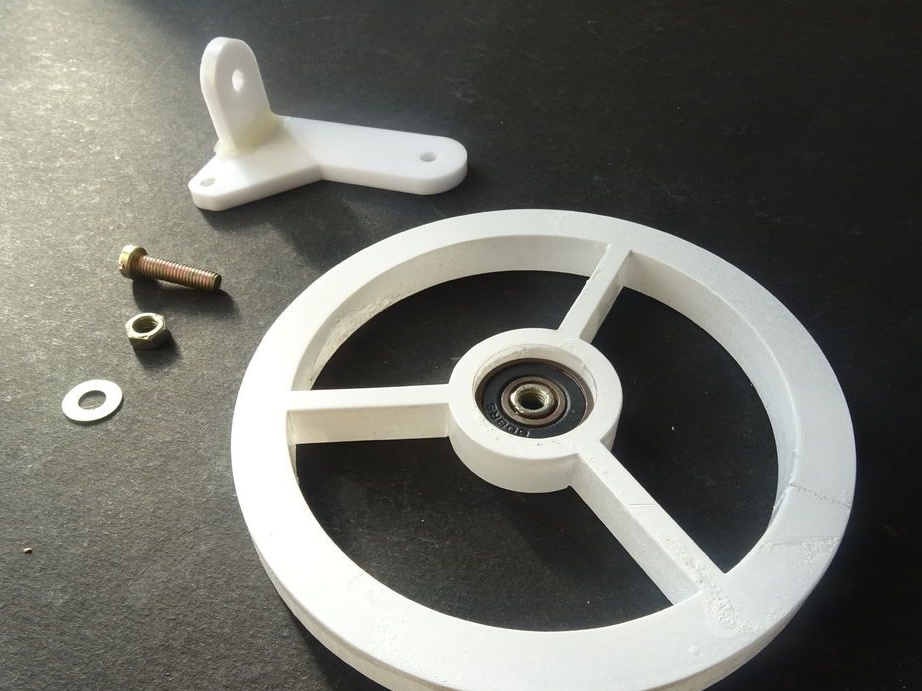
Verzamelt nu de voorwielen.
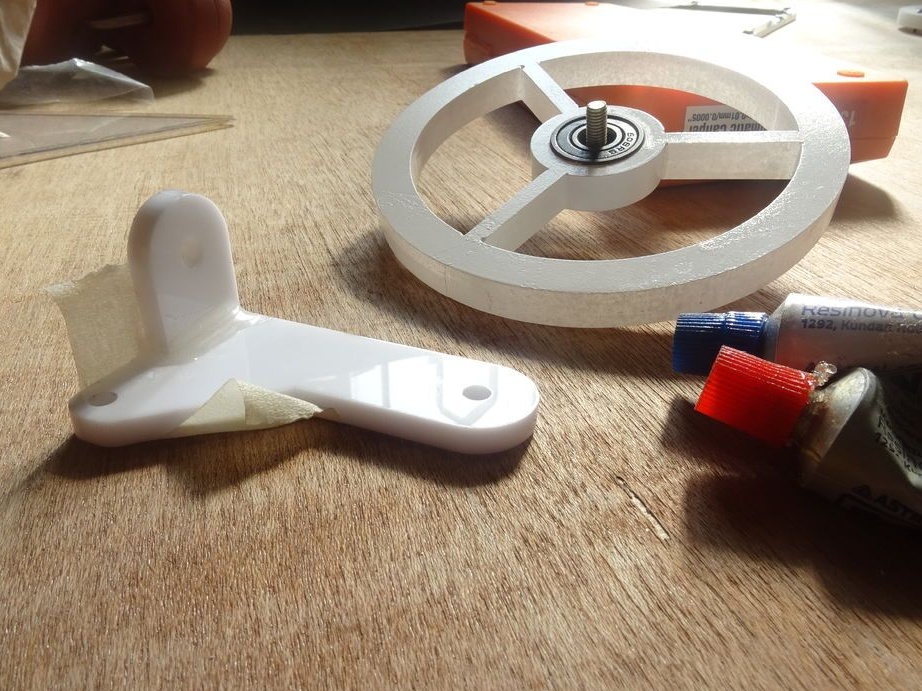
Een moer van een geschikte maat verstopt in de binnenring van het lager. Drukt lagers in de voorwielen.
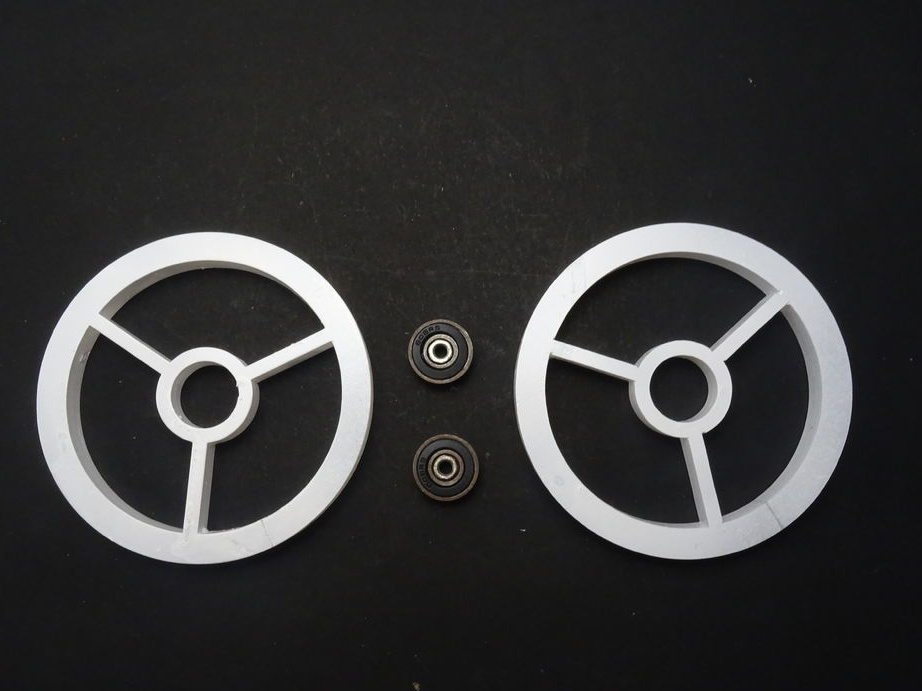



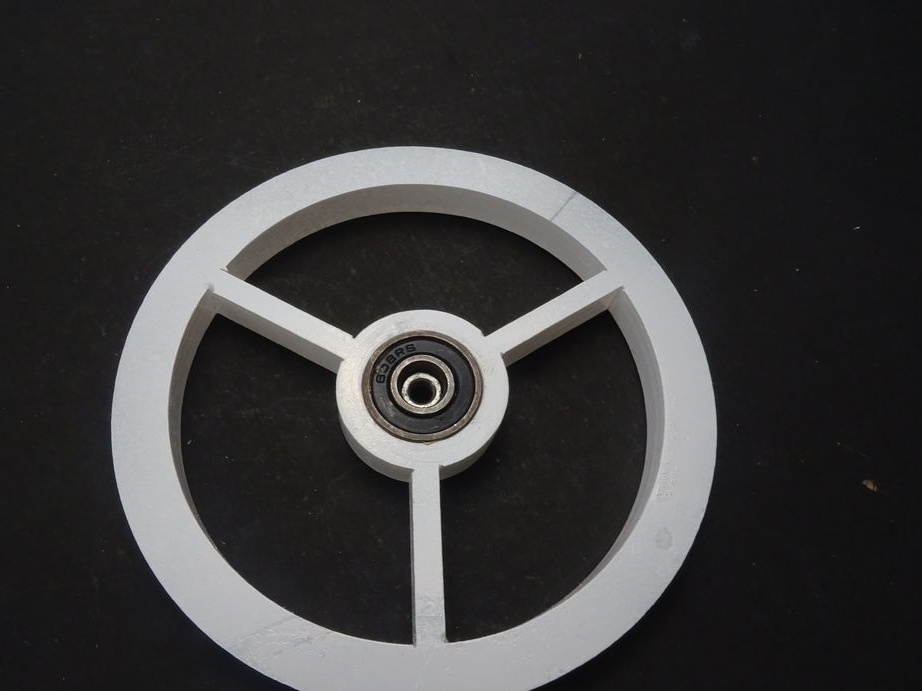
De wielen zijn klaar.

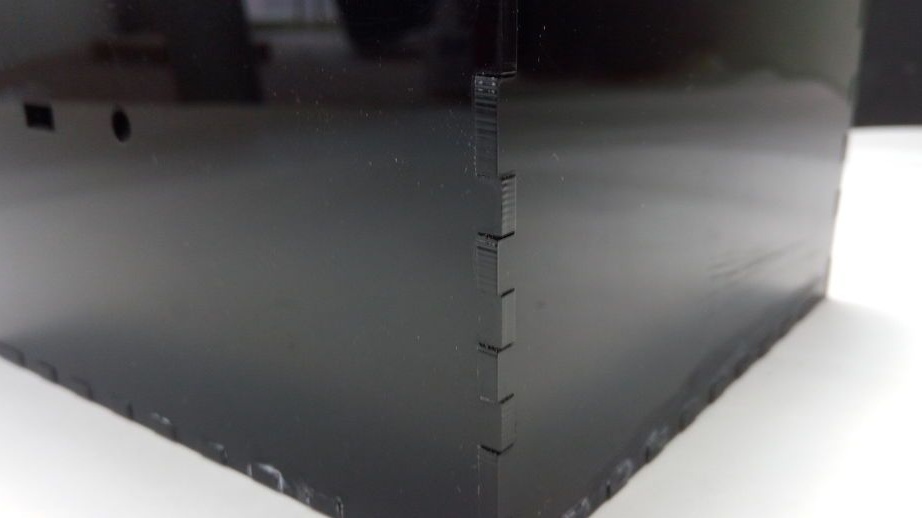
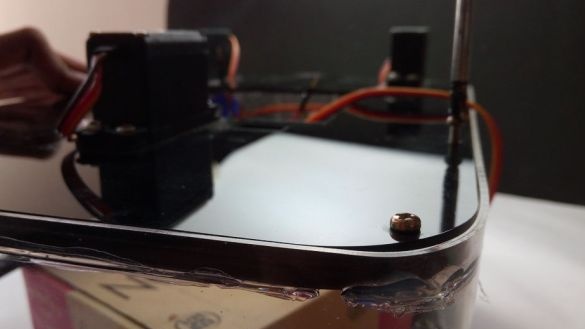
Stap twaalf: elektronica-behuizing
Lijmt de behuizing voor de elektronica.
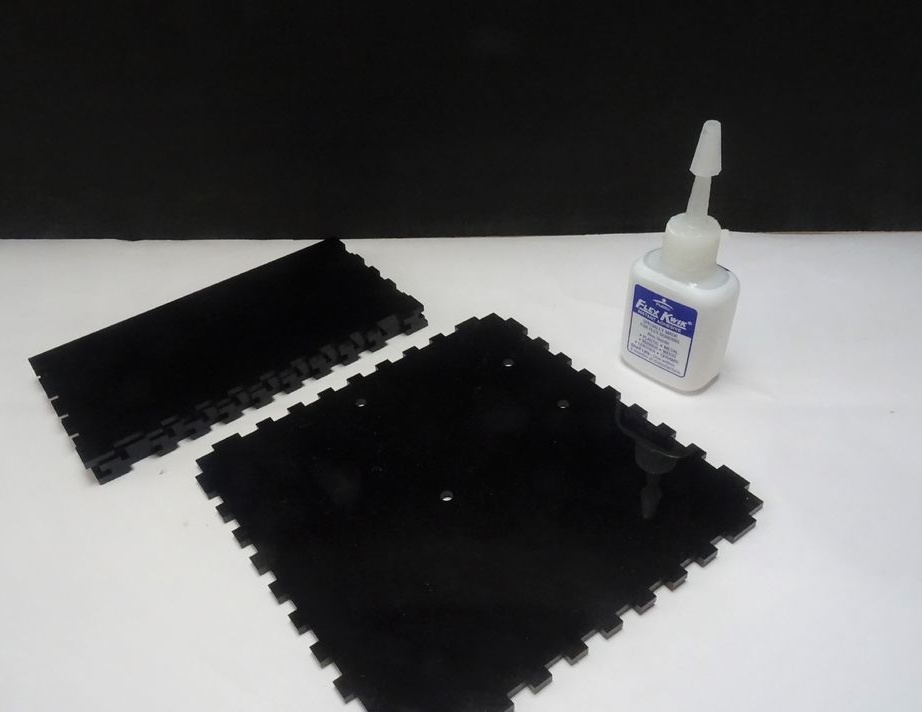
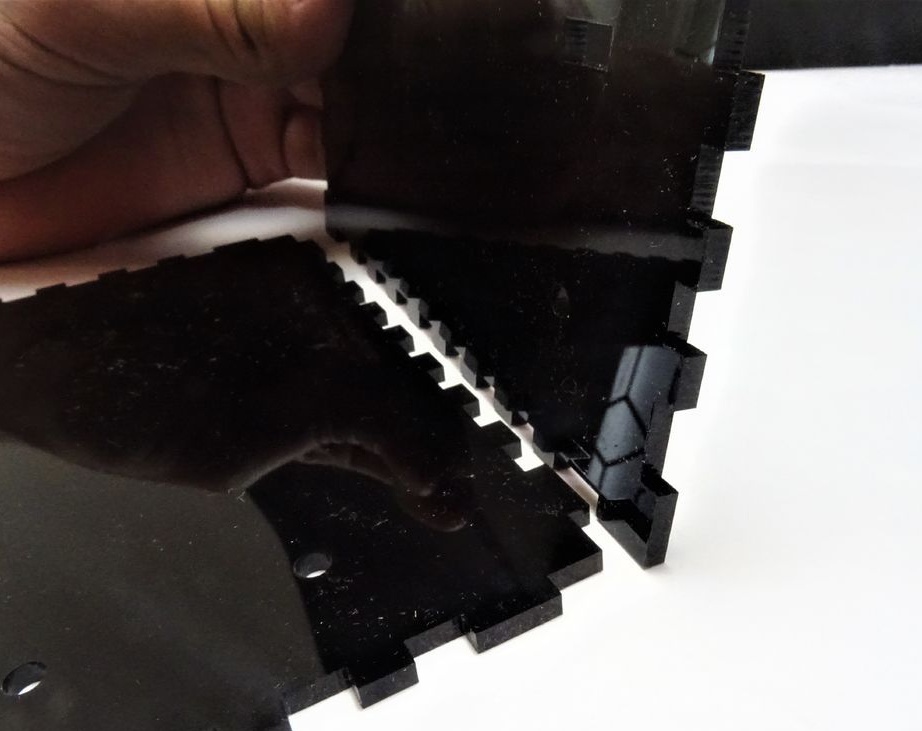

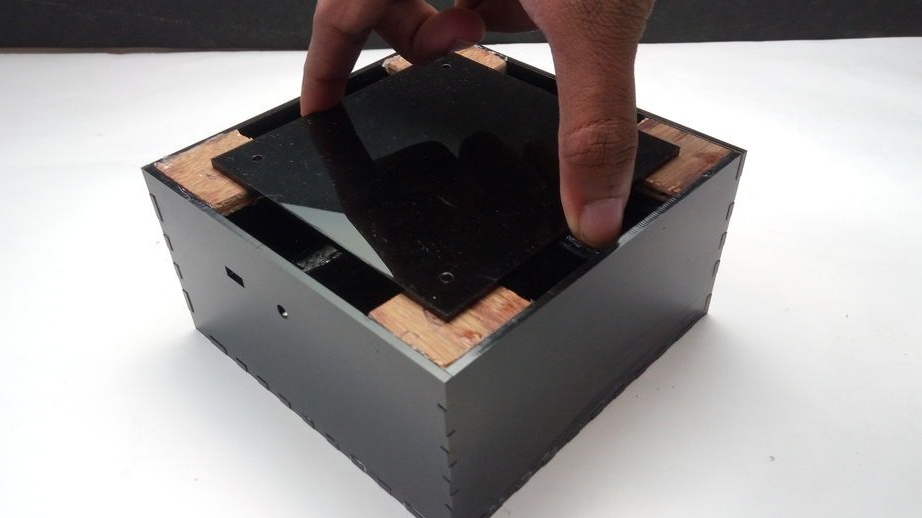
Deze doos zal alles bevatten elektronisch componenten, wat betekent dat het zo grondig mogelijk waterdicht moet worden gemaakt.


In de hoeken van de doos worden vier vierkanten uit het bord gesneden en gelijmd. Het doosdeksel wordt eraan bevestigd.



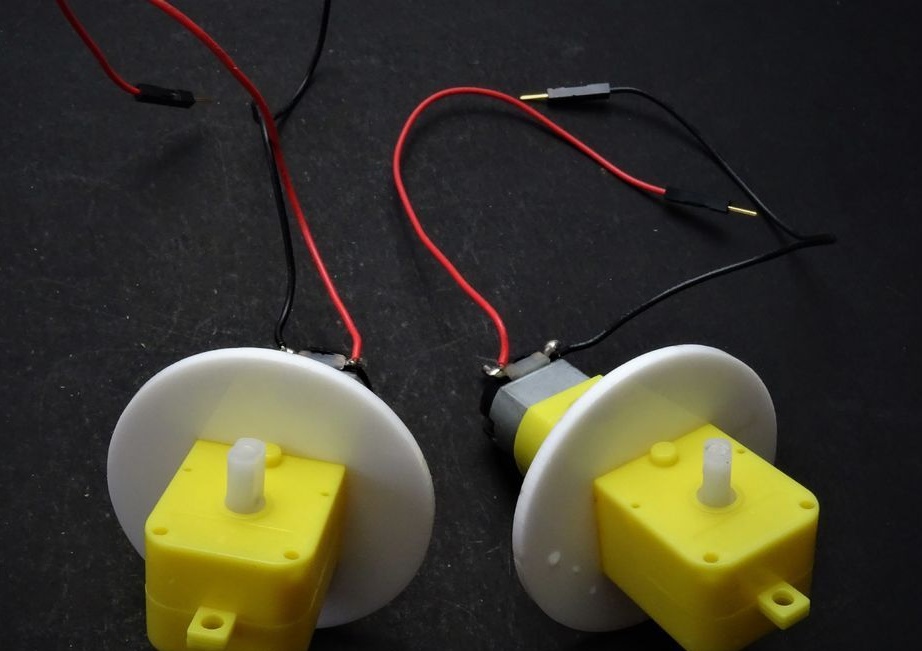
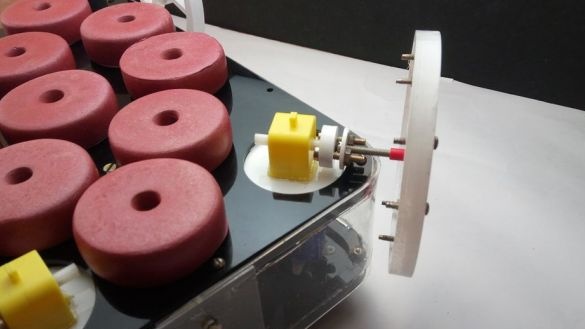
Stap dertien: wielmontage
Nu moet je de wielen en versnelling koppelen met een koppeling.





Schroeft de voorwielen aan de tractie.


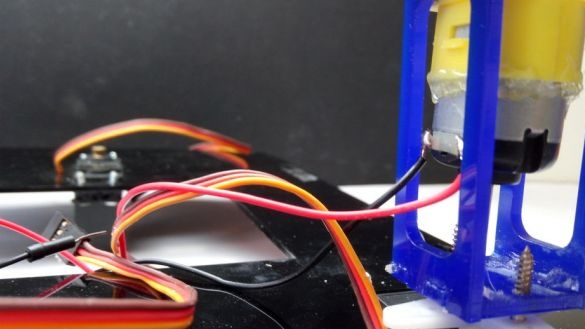
Stap veertien: Sluit elektronica aan
Volgens het schema installeert het elektrische onderdelen.
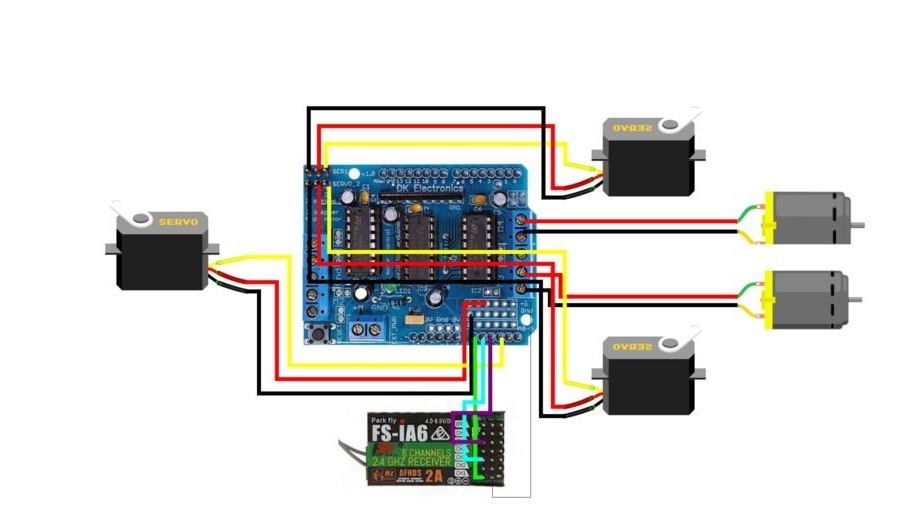

De draden van de linkermotor naar M1, rechts naar M2. Verbindt een motordriver. Verbindt servo's. Installeert de ontvanger: GND van de ontvanger naar Arduino; +5 V ontvanger naar +5 V Arduino; pin 3 naar A0; pin 1 naar A1; pin 5 naar A2. Verbindt de batterij.
Stap vijftien: Download code
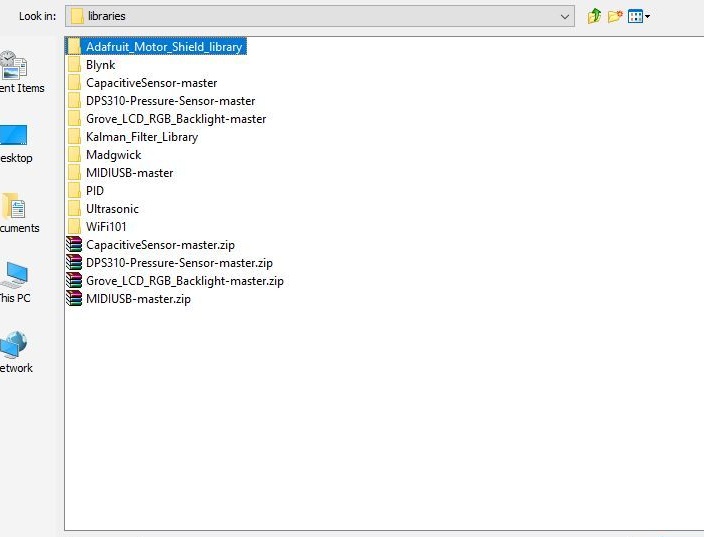
Eerst moet je downloaden de bibliotheek.
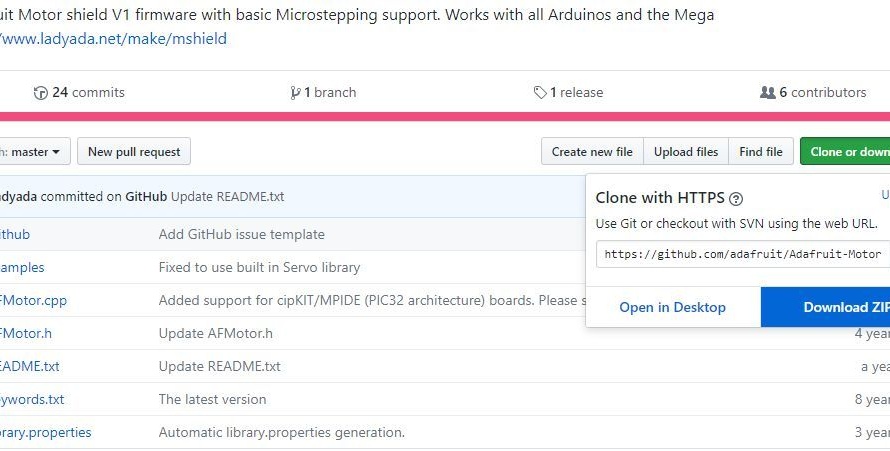
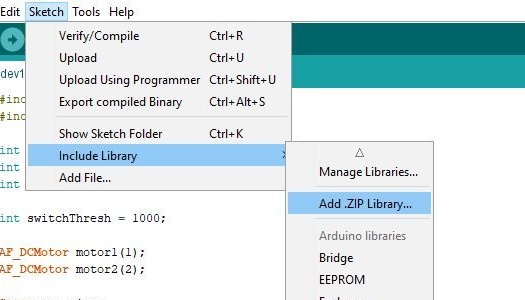
Download vervolgens de code. Bij het laden moet de batterij worden losgekoppeld.
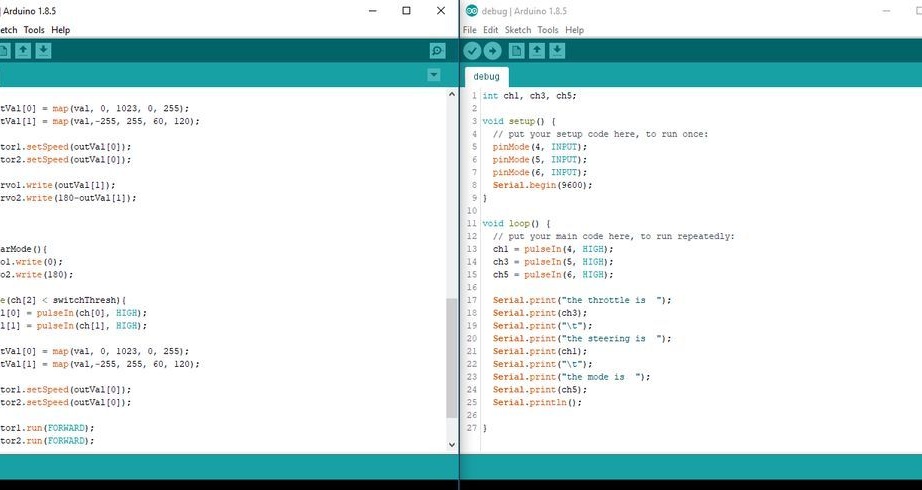
Download onderstaande code.
amphibious_rover_code.ino
Na het downloaden van de code controleert het de werking van motoren en aandrijvingen.
Stap zestien: montage
Nu is het tijd om de terreinwagen te monteren.
[midden[/ center]
Installeert servo's. Installeert reductiemotoren.

Zet de wielen vast. Draait beide helften van het lichaam.






Alles is klaar en nu kunt u testen.