


Materialen en gereedschappen voor montage:
- roterende controller;
- vertel Edison met Arduino Breakout Board
- I2C PWM-stuurprogramma;
- realtime klokuitbraak;
- mini I2C OLED;
- twee servo's;
- Drie servo's met metalen tandwielen;
- twee draden voor een servo-aandrijving van 30 cm lang;
- montagebus voor stekker;
- tweestanden tuimelschakelaar;
- borstel en tandpasta;
- voeding voor 5V 3A;
- een plastic spuit;
- moeren en schroeven;
- moer en draadstang;
- een stuk transparant acryl van 61 cm x 61 cm x 3 mm;
- multiplex van 91 cm x 61 cm x 6 mm;
- 3D-printer.
Robot montageproces:
Eerste stap. Mechanisch deel
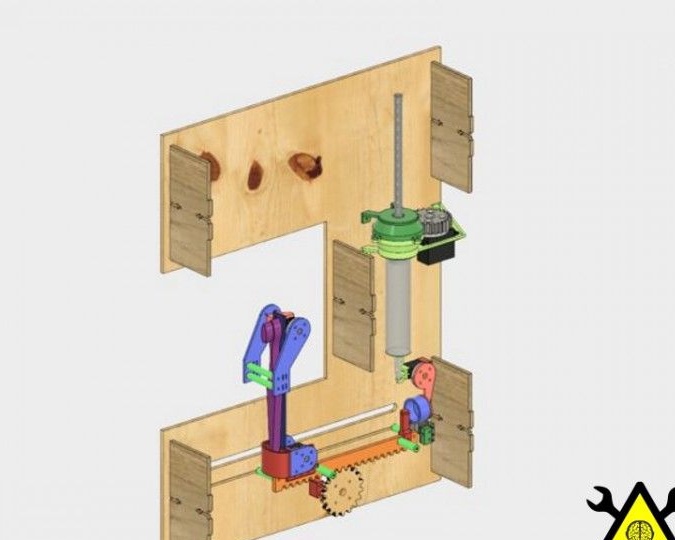
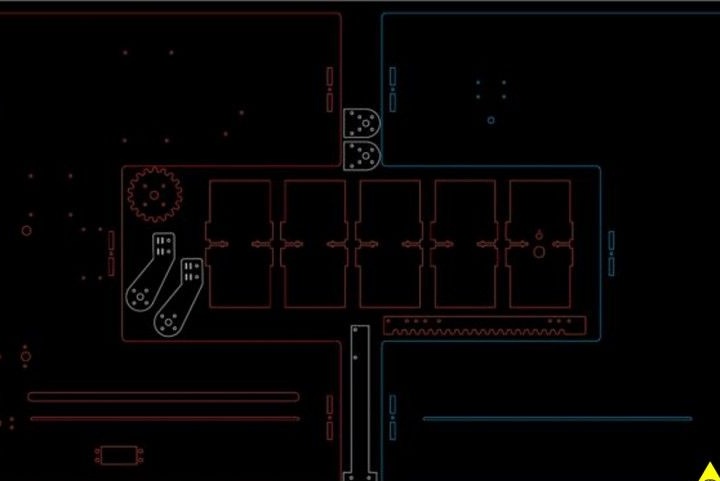
Het apparaat is voor het eerst gemodelleerd met een combinatie van Fusion 360 en Illustrator. Daarbij is een hele technologie ontstaan, waaronder 3D-printen en het lasersnijden van metaal. In totaal kan het systeem worden onderverdeeld in vier hoofdknooppunten. Dit omvat een wagen, een tandenborstelhouder, een hoofdgedeelte en een dispenser.
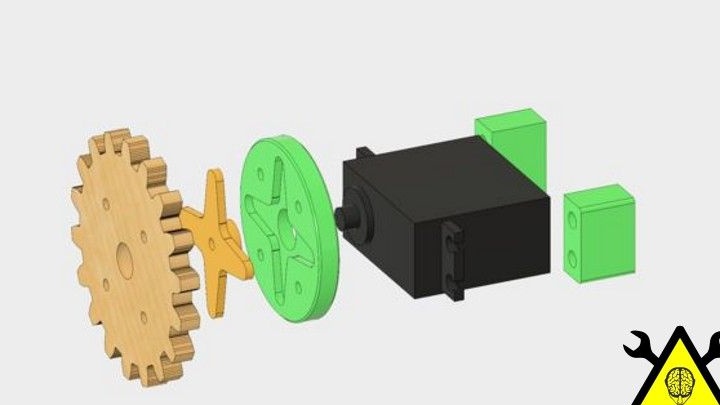
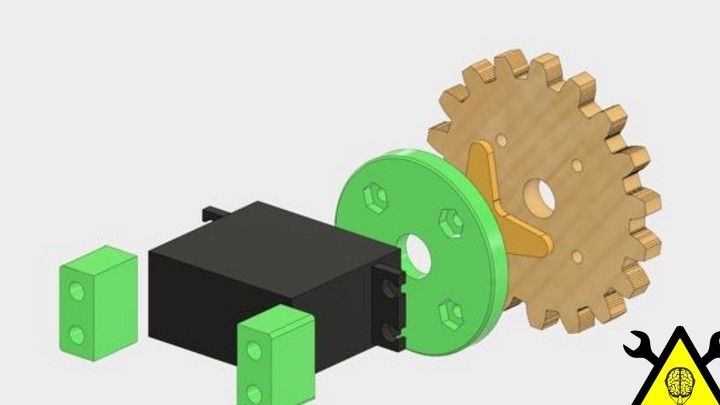
Om ervoor te zorgen dat zelfgemaakte producten voor bredere behoeften worden gebruikt, werd besloten om adapters voor standaard- en microservo's te modelleren. Deze adapters hebben sleuven voor het bevestigen van standaard assen en ruimte voor vier moeren aan de achterkant. Omdat de adapters zijn ontworpen voor assen, moeten ze op de platen of op andere objecten worden bevestigd.

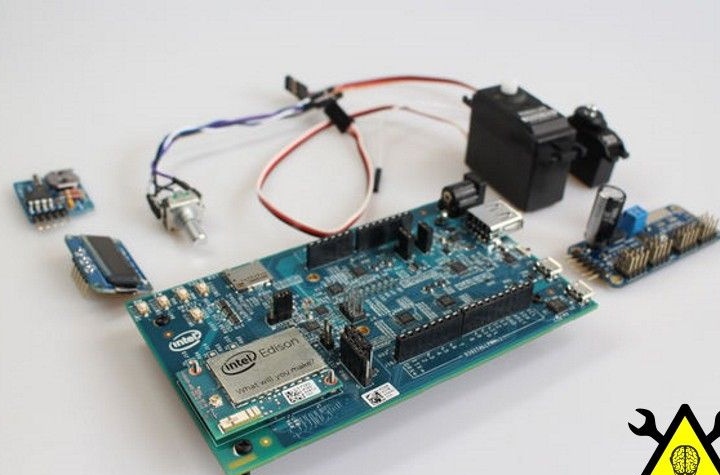
Stap twee Het elektrische circuit van het apparaat
Als voeding wordt een 5V en 3A bron gebruikt. Dit is voldoende om één motor aan te drijven. Het moederbord verbruikt ongeveer 500 mA en de motoraandrijvingen, de originele LED en de realtime klok verbruiken een kleine hoeveelheid stroom.
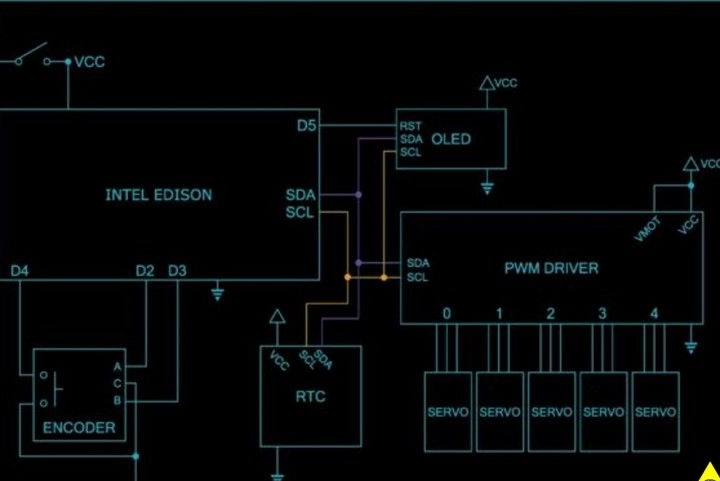
De Intel Edison-processor wordt gebruikt als de belangrijkste controller van het systeem. Door de scheiding van de printplaten kan de processor gemakkelijk communiceren met andere componenten van de elektronica. Het bord sluit aan op de motor, klok en scherm.
Om de vijf servo's te besturen, wordt een PWM-bord gebruikt. De kracht van de motoren kan worden geregeld via een externe bron, maar de auteur besloot de Vmot aan de VCC-pin te koppelen.Hierdoor wordt het hele systeem aangedreven door 5V.
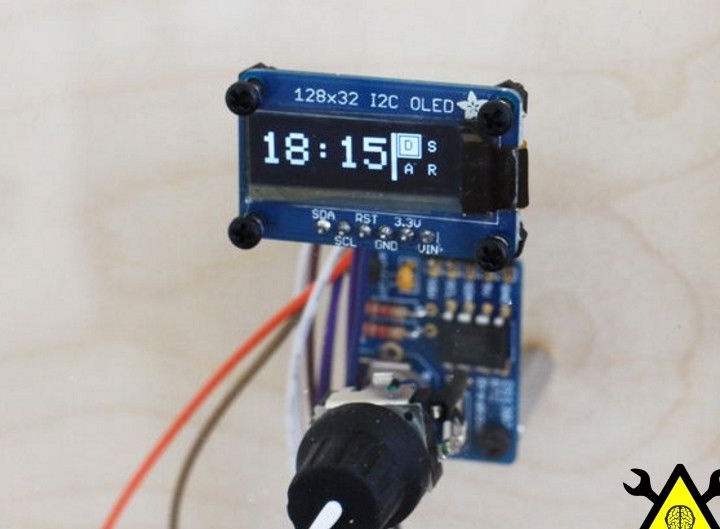
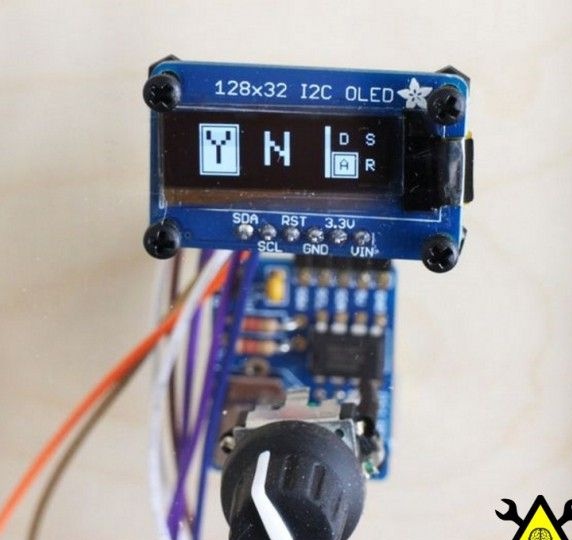
Om het apparaat te kunnen bedienen, wordt een klein display van 128 x 32 gebruikt Een roterende sensor fungeert als de belangrijkste gebruikersinvoer. De uitgangen van de sensor zijn aangesloten op de digitale contacten van de processor.
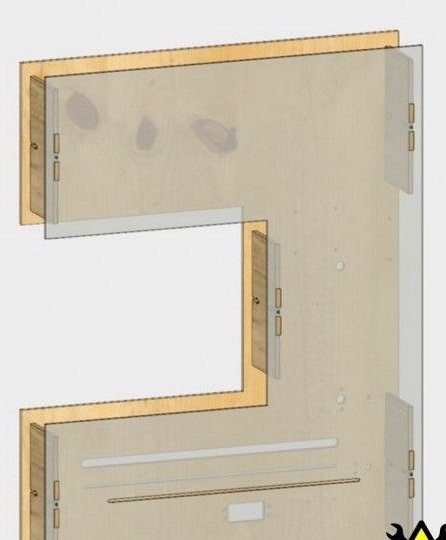
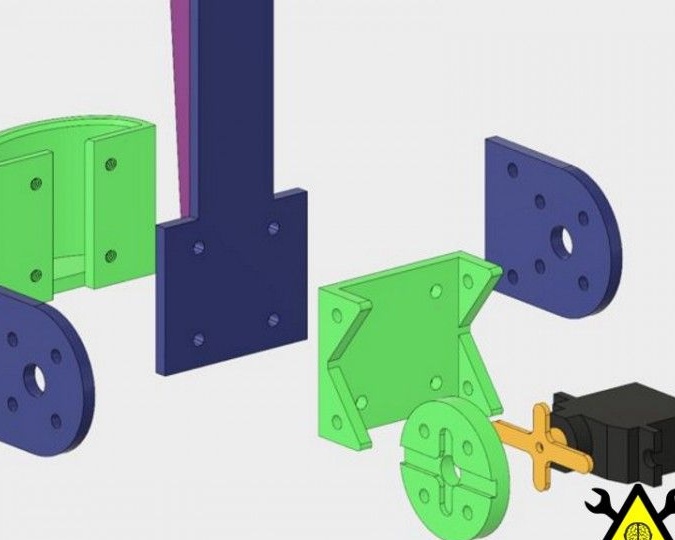
Stap drie Body montage
Het achterste deel fungeert als steun voor de koffer; het is gemaakt van multiplex met een dikte van 6 mm. Vier schroeven worden gebruikt om de PWM en processor vast te zetten. Edison is aan de voorkant gemonteerd en PWM aan de achterkant.
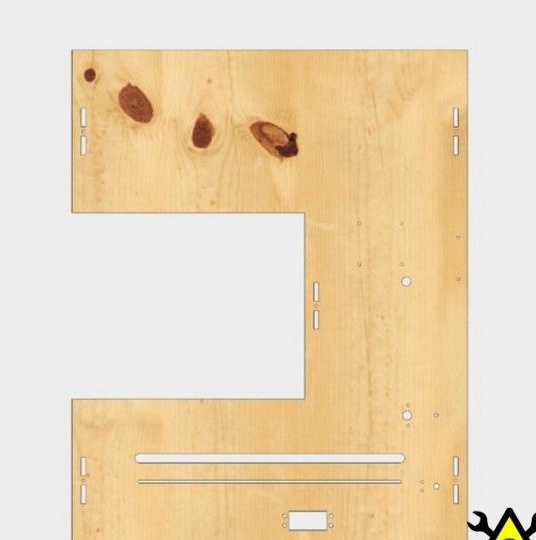
Er worden vijf afstandsplaten gebruikt om de voor- en achterpanelen met elkaar te verbinden. Afstandhouders worden met schroeven en passende moeren aan de platen bevestigd. De platen zijn bijna symmetrisch, maar de uitsteeksels aan één kant zijn korter, ze strekken zich niet naar voren uit. De schakelaar wordt samen met de stroomconnector op de onderste veerpoot bevestigd.

Het voorpaneel is vooral nodig om het apparaat tijdens gebruik te beschermen. Er worden vier schroeven gebruikt om het scherm vast te zetten; de rotatiesensor is ook bevestigd met moeren.
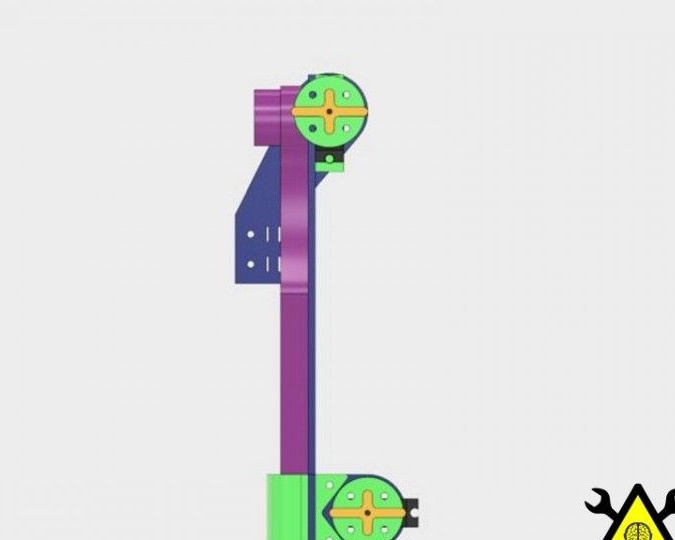
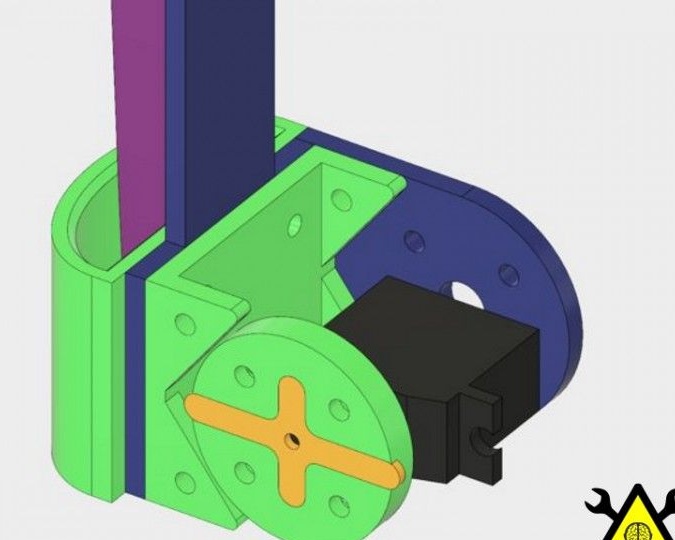
Stap vier Tandenborstelhouder
Er zijn twee servo's op de tandenborstelhouder, die worden aangedreven door de componenten - de basis en de "kop". Op de foto zie je de elementen blauw en groen. Wat met een lasersnijder is gesneden, is blauw gekleurd en elementen die op een 3D-printer zijn afgedrukt, zijn groen gekleurd.

Dankzij de kop valt de tandenborstel niet. De handen worden aangedreven door een enkele servo-aandrijving, ze worden vastgemaakt met twee pakkingen. Een 3D-adapter en twee schroeven worden gebruikt om de servomotor aan de hoofdplaat te bevestigen. Er zijn vier gleuven in de plaat, waardoor er met behulp van zwarte elastiekjes een tandenborstel aan vast zit.
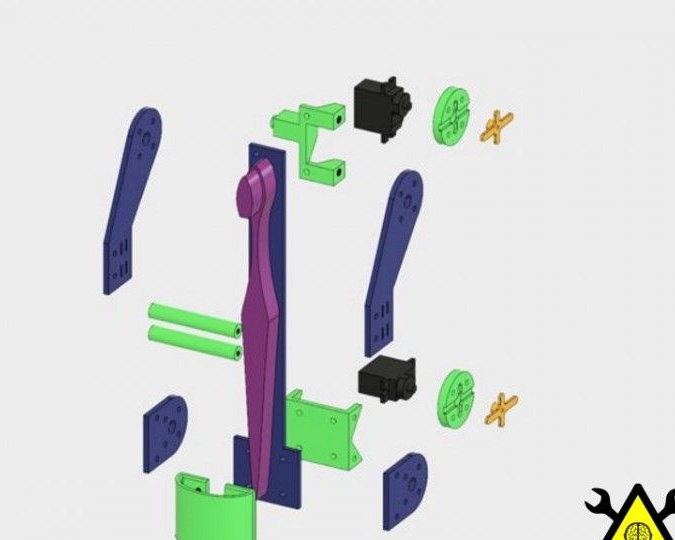
De basis is een kleine 3D-beker, het voorkomt dat de borstel valt. Nadat de tandenborstel in het geheel is geladen, houdt de servoaandrijving deze vast en draait naar beneden. Acht schroeven worden gebruikt om de platen te verbinden.


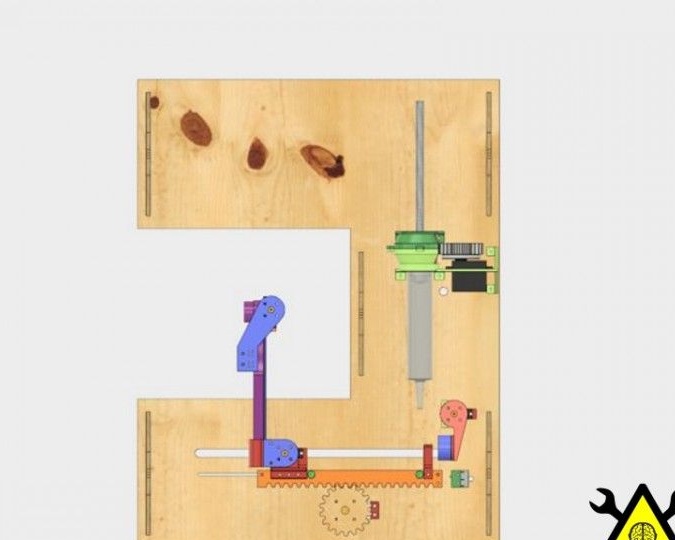
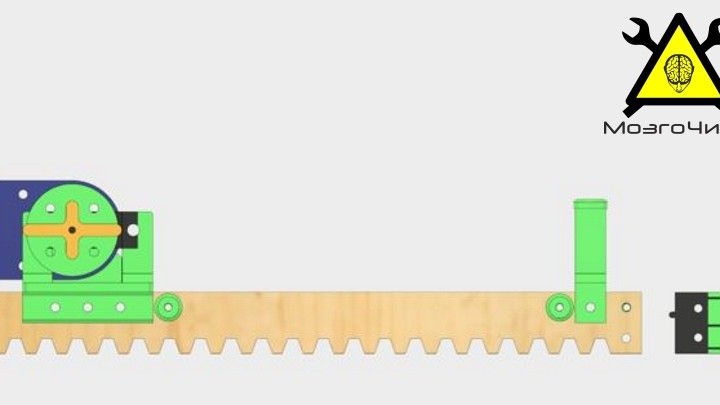
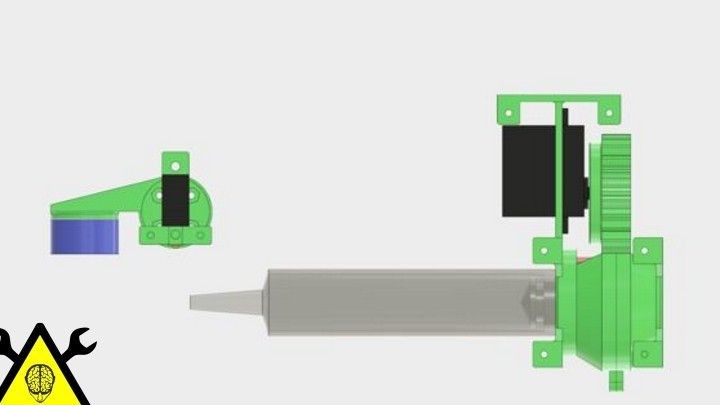
Stap vijf Railmontage
Het frame bestaat uit drie unieke delen, dit is een hoofdsteun, koets en steunen. Met behulp van de slede wordt de framehouder bevestigd. De wagen zelf is bevestigd met drie schroeven. De hoofdsteun is nodig om de belasting van de hoofdservohouder te verminderen, deze wordt verder op de slede op het frame gemonteerd.
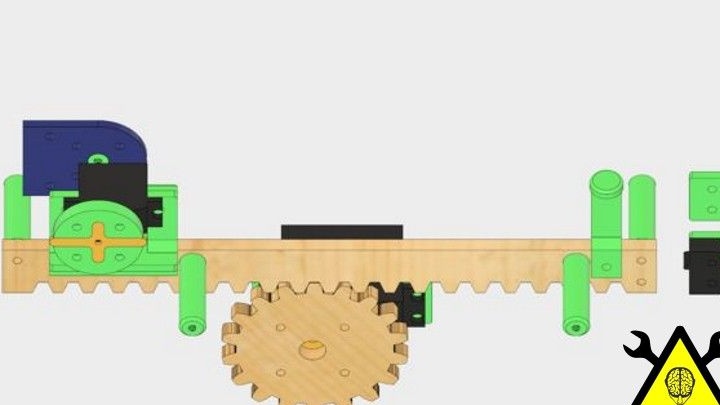
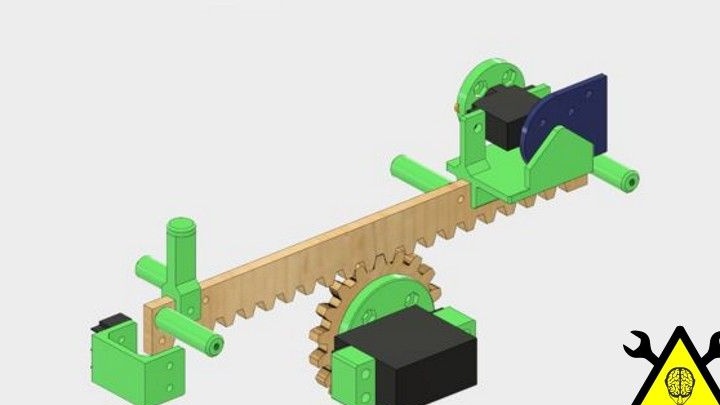
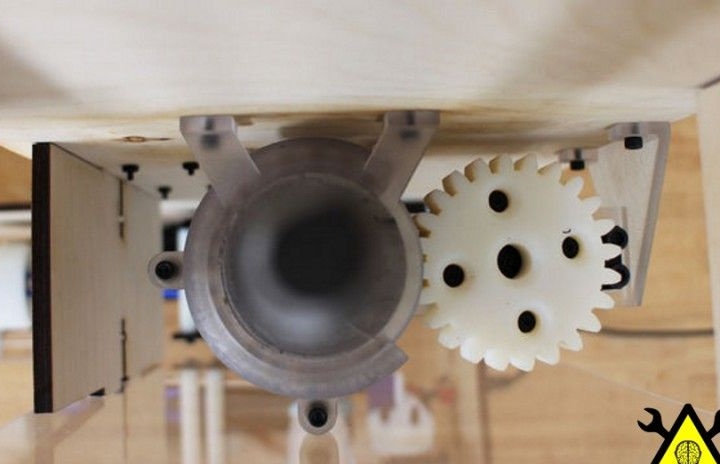
Het tandwiel is onder het frame gemonteerd. Het is gesneden uit multiplex van 6 mm dik en bevestigd aan een standaard servo-as. De servo-aandrijving zelf is enigszins verschoven van de basisplaat geplaatst, in verband hiermee zitten er identieke rechthoekige stutten op. De servo zelf is met vier schroeven aan de basis bevestigd.
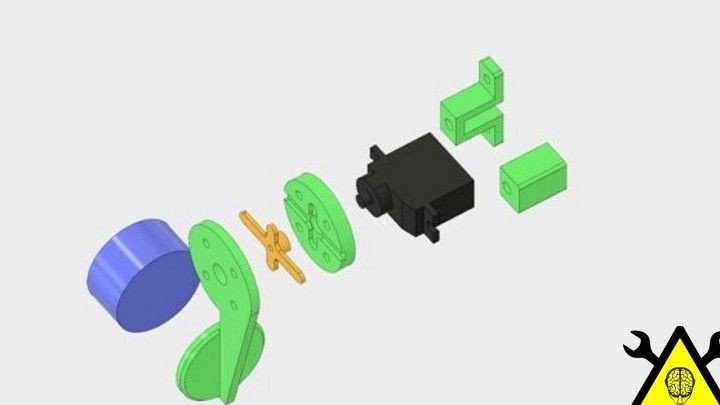
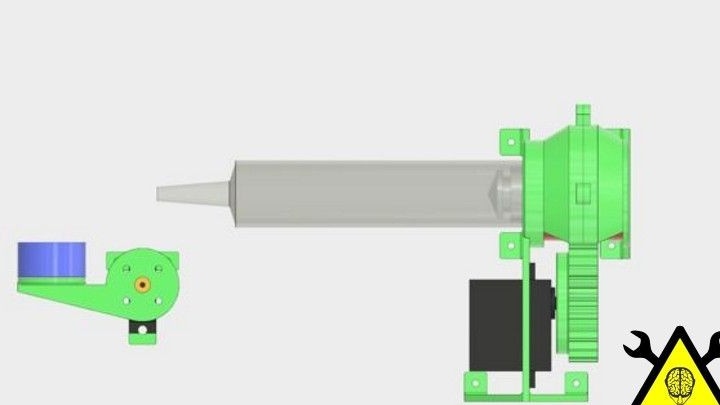
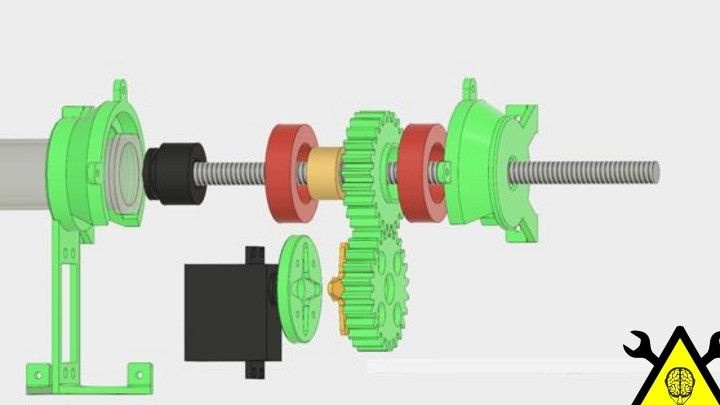
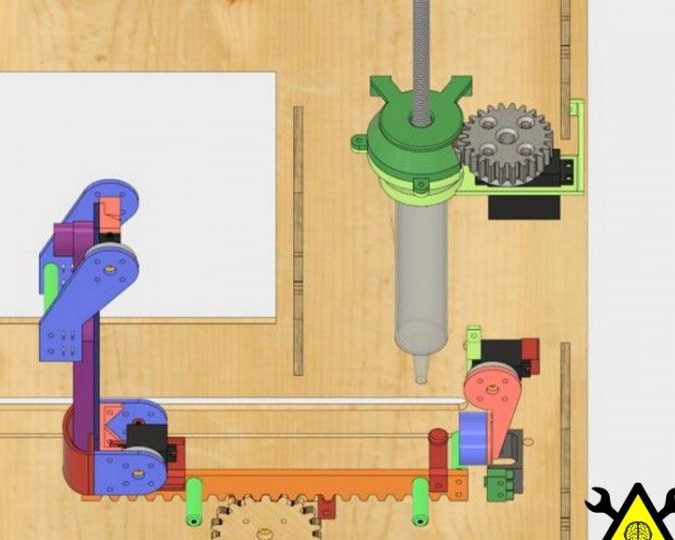
Stap zes Montage van de dispenser
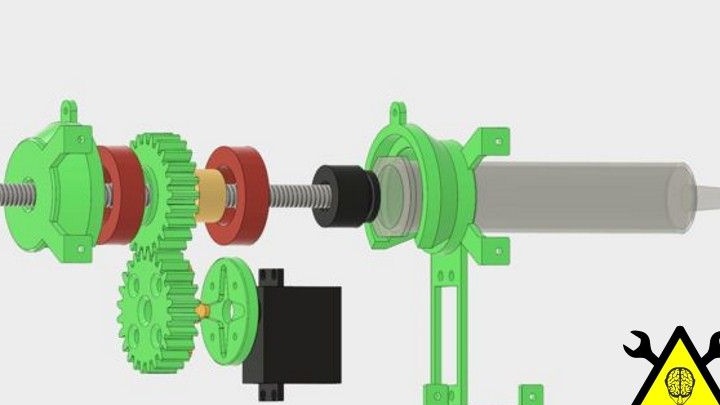
Het meest complexe mechanisme in het apparaat is een lineaire aandrijving. Dankzij hem vindt de dosering van de pasta plaats. De kern van het apparaat is een draadstang en een moer, met behulp hiervan wordt de buis samengedrukt. Er worden zes schroeven gebruikt om de schijf vast te zetten.
Zevende stap. Software
In totaal heeft het programma drie functies: het instellen van de tijd, het instellen van het "alarm" en ook de functie van het starten van het apparaat.
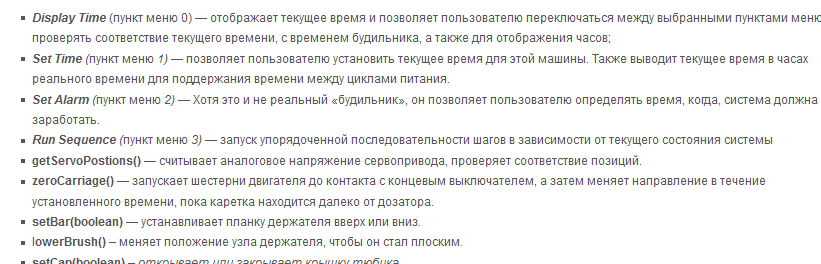
Dat is alles, na het knipperen en configureren is het apparaat klaar voor gebruik.