
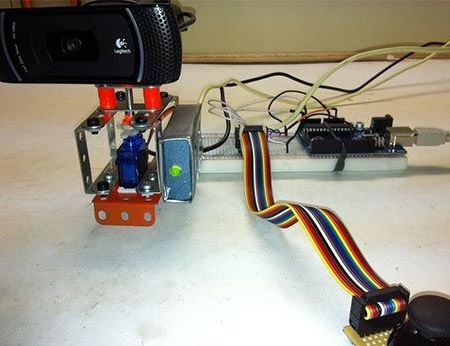
Dit artikel gaat in op hoe te gebruiken Arduino kan de webcam besturen. Meer specifiek zal de besturing een servo-aandrijving zijn, die in het frame is geïnstalleerd van de ontwerper waarop de webcam al zal worden gemonteerd.
Door de auteur gebruikt materiaal om dit apparaat te maken:
1) metalen constructor
2) koud lassen
3) webcam
4) servo
5) LED's
6) Arduino
8) joystick van PS3
Overweeg in meer detail het ontwerp en de belangrijkste punten bij het maken van een apparaat voor het besturen van de camera.
Verbaasd over de vraag hoe je zo'n handig Arduino-platform kunt gebruiken naast standaardfuncties zoals zwaailichten. Na een gesprek via Skype met een collega op het werk kwam de auteur met een interessant idee. Stel dat je zijn collega's de kans geeft om een webcam te bedienen en te kijken wat er op kantoor gebeurt. Zo gezegd, zo gedaan, en de auteur begon te werken aan de implementatie van dit idee.
Aanvankelijk bestudeerde de auteur de belangrijkste materialen van artikelen waarbij een joystick werd gebruikt om eenheden te bedienen die op het Arduino-platform waren gemaakt. Nadat hij het materiaal van deze artikelen had begrepen, realiseerde de auteur zich dat hij de oude joystick van de PS3 kon gebruiken om de bewegingen van de servo van hem te bedienen.
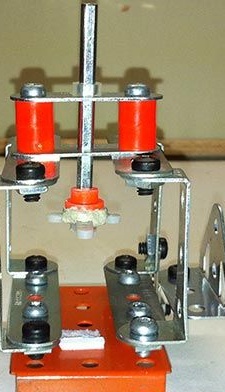
Beginnend met bouwen, besloot de auteur om een frame te bouwen waarin de servo-aandrijving en de camera zelf worden geplaatst. Om de taak niet te compliceren, besloot de auteur om de gebruikelijke metalen constructeur te gebruiken, die hij in een kringloopwinkel had gekocht.
Met de details van deze constructeur bleek het zo'n frame van het toekomstige apparaat te maken:
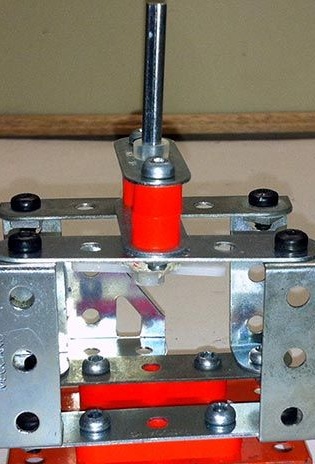
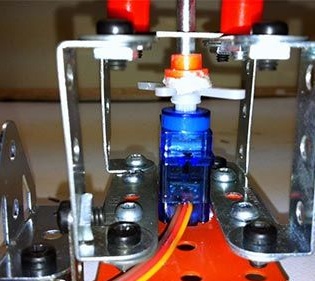
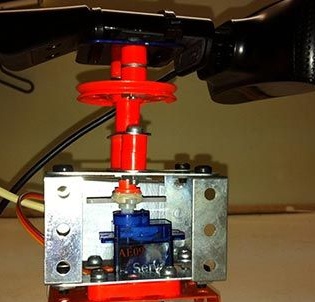
In het frame is een servo-aandrijving geïnstalleerd. Zoals te zien is op de foto, past het perfect in het gemaakte frame. Om de servo op het frame te bevestigen, gebruikte de auteur dubbelzijdige tape. Door middel van koud lassen werd de servo-as verbonden met het tandwiel, dat de beweging van het platform met de camera regelt.
Het is belangrijk om ervoor te zorgen dat het transmissieontwerp zo is gemaakt dat er geen onnodige belasting is.
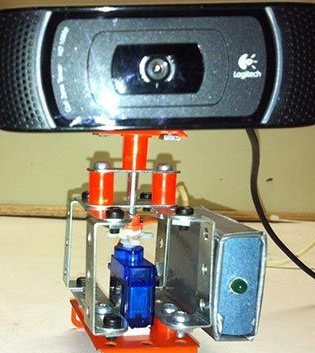
Vervolgens begon de auteur de webcam te installeren. Er werd een Logitech-camera gebruikt, die wordt gebruikt in het kantoor van het bedrijf waar de auteur werkt. Daarom, omdat de camera niet van de auteur is, heeft hij deze niet gedemonteerd en het contragewicht verwijderd, hoewel dit het ontwerp van het toekomstige apparaat zou vereenvoudigen.

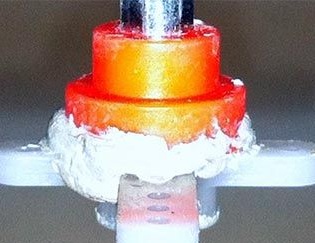
Om het gewicht van de camera op de een of andere manier te compenseren en in het midden van de structuur te verdelen, gebruikte de auteur 2 dikke pakkingen. Hiermee kunt u het gewicht van de kamer van de servo-as naar het hoofdframe verplaatsen en ook de druk van de as op de kamer zelf vermijden.
De camera is gemonteerd op een speciaal rond platform, dat is gebaseerd op een as afkomstig van de servoaandrijving. Op deze manier wordt camerabesturing gerealiseerd door middel van een cross-transmissie.
Nadat het mechanische deel van de constructie klaar was, nam de auteur het over e vulling.
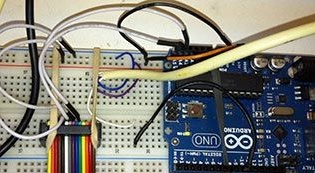
Om te beginnen besloot hij servo's en LED's aan te sluiten die de status van het systeem zullen weergeven.
De servo zelf heeft 3 draden: -GND, + 5V en signaal. De auteur gebruikte 9 pinnen om de mogelijkheid om de schijf te besturen te realiseren. Om een drive enable indicator te maken, installeerde de auteur een diode die is verbonden met twee draden: + 5V en GND met een weerstand op de + 5V-lijn.

Vervolgens bereidde de auteur, op basis van artikelen op internet, een kapotte joystick van de PS3 voor om de drive te besturen.

Vervolgens pakte de auteur een programma voor Arduino, waardoor het mogelijk wordt om de joystick en USB-poort te gebruiken om de servo te bedienen. Om met een USB-poort te communiceren, gebruikte de auteur modemcontrole en een applicatie-terminalemulator zoals Minicom of Putty.
Dit programma biedt verschillende functies voor het besturen van de camera.
Om de camera in het midden van 90 graden te installeren, moet je op "m" drukken, de camera komt ook automatisch naar deze positie wanneer de stroom van de servo wordt ingeschakeld. Om de camera naar links te draaien, moet u op de "F" -toets drukken en door op de "J" -knop te drukken, wordt de camera naar rechts gedraaid.
Je kunt het programma aan het einde van het artikel downloaden.
Omdat de auteur het ontwerp voor het camera-rotatieapparaat niet bijzonder uitwerkte, begon het een aantal nadelen te hebben.
Bijvoorbeeld: aangezien de camera niet in het frame is bevestigd, kan hij bij kanteling van het platform vallen; aangezien de servo vrij klein is, creëert het koppel van de camera extra rotatie, die op zijn beurt de servo vervormt; de gaten voor de servo-as zijn te groot, dus niet statisch en ook onderhevig aan spanning.
Daarom wil de auteur in de toekomst het apparaat een beetje upgraden als volgt: zorg ervoor dat de camerarotatie wordt bestuurd door de pijlen van de joystick en niet door de knoppen; verlicht de belasting van de servo in bochten.