Het artikel bespreekt hoe je een miniatuur vibro-robot maakt doe het zelf. Zo'n robots als ze aan staan, beginnen ze te dansen op een glad oppervlak en draaien ze cirkels op tafel. Dit komt omdat er een onevenwichtig gewicht op de motor is geïnstalleerd, wat trillingen veroorzaakt. Iedereen kan zo'n robot thuis in elkaar zetten, dit vereist een minimum aan vaardigheden en materialen.
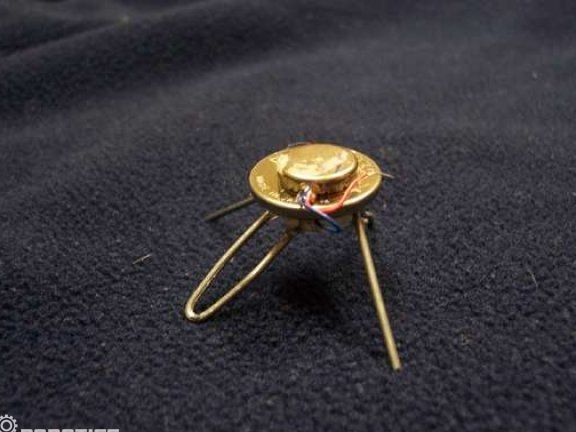
Concreet dit het model De robot heette Itty Bitty. Hier wordt een trilmotor van een oude mobiele telefoon gebruikt en wordt de robot aangedreven door een 3V klokbatterij.
Materialen en tools voor het maken van een robot:
- 3V lege batterij;
- vibratiemotor van een oude mobiel;
- een grote paperclip;
- soldeerbout met soldeer en flux;
- elektrische tape;
- hete lijm;
- marker van donkere kleur.

Van de tools heb je een vijl, alcohol en tang nodig.
Het fabricageproces van de robot:
Eerste stap. Maak de benen van de robot
De benen van de robot maken is het meest cruciale moment in dit hele gebeuren. De werking van de hele robot hangt af van hoe correct ze zijn gemaakt. Allereerst moeten de benen sterk zijn, omdat de robot bij vibratie behoorlijk sterk zal springen. Ze zijn gemaakt uit één stuk draad. Een paperclip is hiervoor het meest geschikt. Allereerst moet het worden rechtgetrokken en vervolgens in 6 gelijke delen worden verdeeld. Als gevolg hiervan zal de lengte van elk afzonderlijk onderdeel 1/16 inch zijn.



Een belangrijk punt bij het werken met een paperclip is de vloeiende beweging. Als u de clip te snel buigt, kan deze breken. Als hoeken groter zijn dan 90 graden, moeten ze worden afgerond.
Nu moet je een markering nemen en de clip 90 graden op deze plek buigen, bij de andere markering moet je in de tegenovergestelde richting buigen. Als het uiteinde van de clip tijdens het buigen wordt afgerond, vermindert dit de kans op een breuk aanzienlijk.



Bij de derde markering moet je een bocht van 90 graden maken, maar de plaats van de bocht moet zo ver mogelijk van het einde liggen.
Bij de vierde markering wordt een bocht van 180 graden gemaakt, het einde moet achter zijn.
Op het vijfde been wordt een buiging van 90 graden gemaakt en deze moet zo ver mogelijk verwijderd zijn van de andere twee aangrenzende benen. Kortom, de benen moeten worden aangepast zodat iedereen de vloer niet gelijkmatig raakt.


Stap twee Motor installatie
De batterij fungeert als ondersteunend element bij zo'n robot. Je moet tremokle nemen en er een vibro-motor op plakken. Daarna moet een van de motordraden aan het batterijcontact worden gesoldeerd, dit is het bovenste contact. Om het soldeer neer te leggen moet de batterij licht bekrast worden, dit kan met een vijl.

Stap drie Lijm de benen
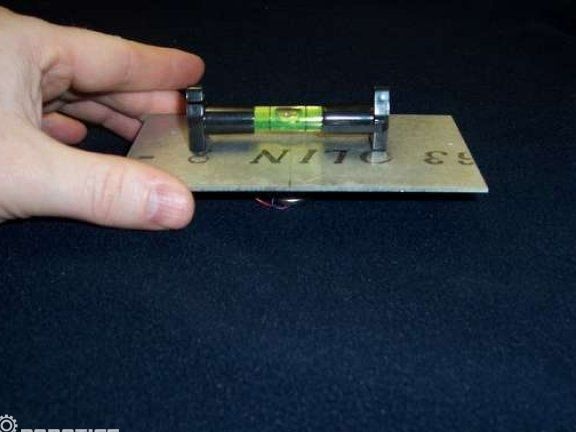
Nu hoef je alleen nog maar de benen aan de robot te plakken. Om dit te doen, moet je de batterij op tafel leggen en de benen van de robot erop plaatsen. Vervolgens moeten de poten naar beneden worden gedrukt; hiervoor kan een lineair niveau of stuk aluminium op de poten worden aangebracht. Voordat u lijm aanbrengt, is het raadzaam om het oppervlak van de batterij te ontvetten met alcohol. De lijm hoeft niet te worden betreurd, omdat bij het werken aan de benen een voldoende grote kracht inwerkt. Als u de voeten slecht steekt, kan de robot tijdens het gebruik uit elkaar vallen.
U hoeft zich niet te haasten om de robot te laten draaien, de lijm moet worden gestold. De auteur raadt aan om het werkstuk in de koelkast te plaatsen, zodat de lijm sneller droogt.


Dat is alles, de robot is klaar en u kunt hem controleren. Om de robot aan te zetten, moet je een stuk isolatietape nemen en de tweede draad van de motor op de accupool plakken. Door de robot op een gladde tafel te plaatsen, kun je nu observeren wat hij gaat doen.