De meester is al lang geïnteresseerd in vliegtuigmodellen. In eerste instantie was het een vliegtuigmodel, daarna quadrocopters. In dit artikel vertelt de wizard u welke materialen u moet kiezen voor een quadrocopter en hoe u een frame van multiplex kunt maken. Laten we een korte demovideo bekijken.
Om een quadrocopter te maken, gebruikte de meester het volgende
Gereedschap en materialen:
- berken multiplex;
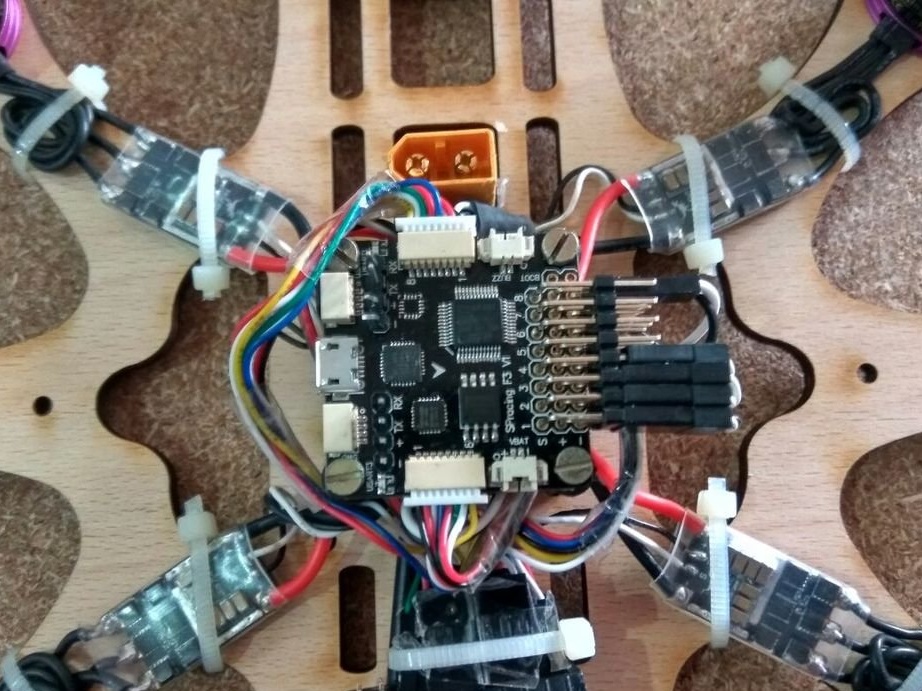
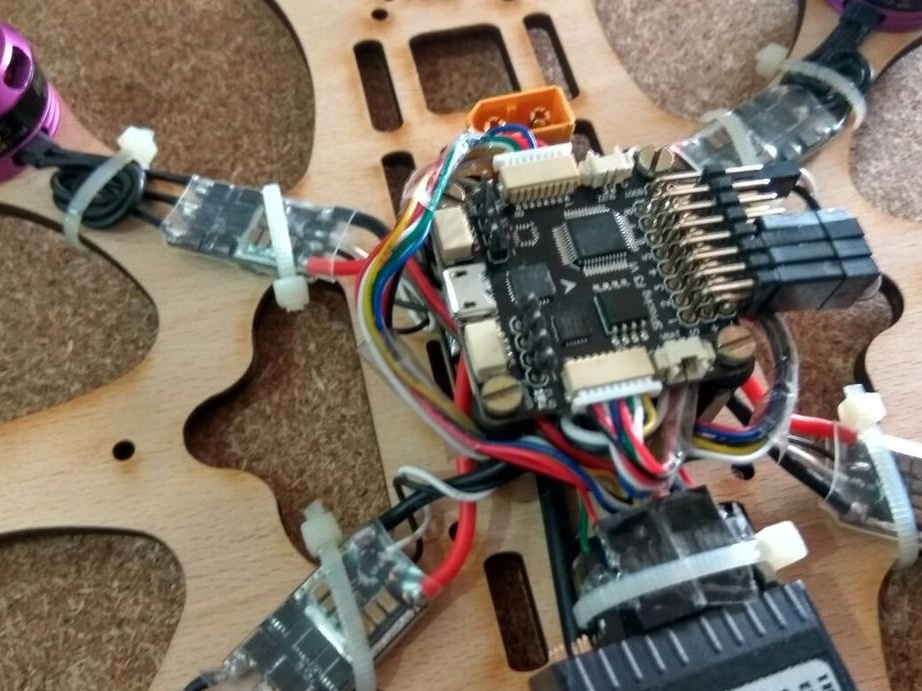
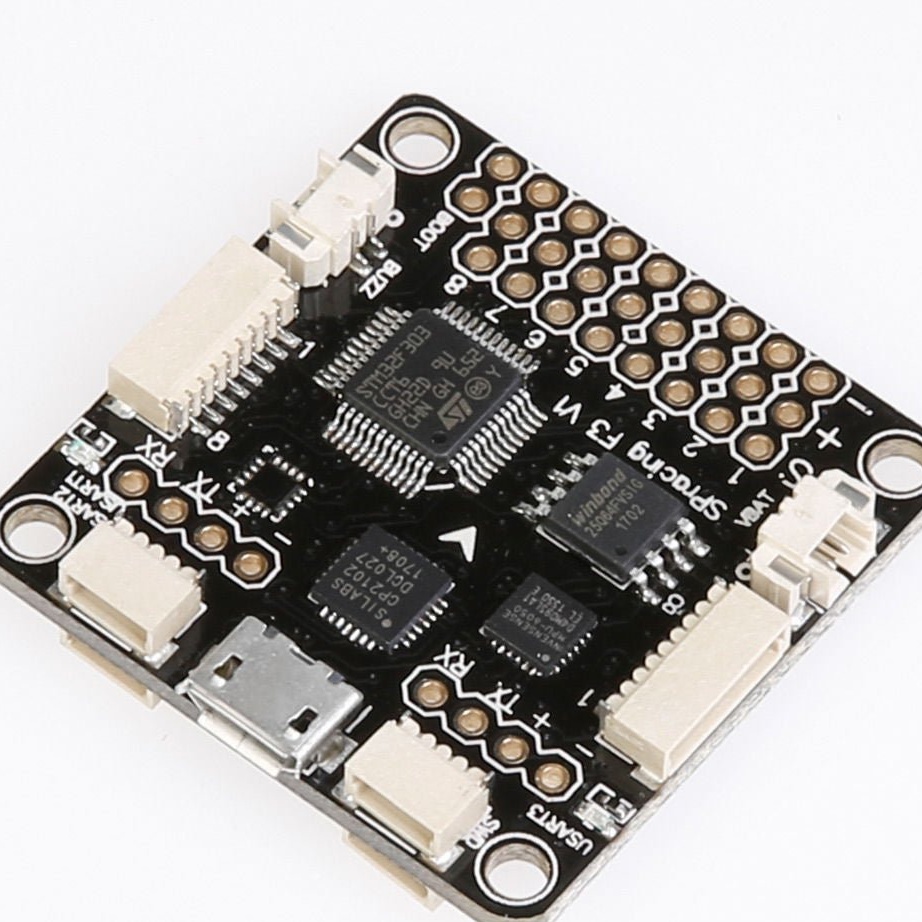
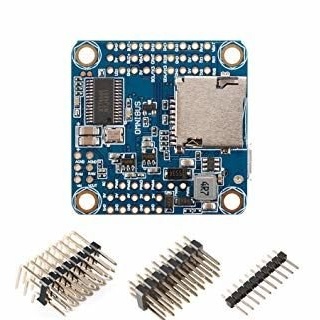
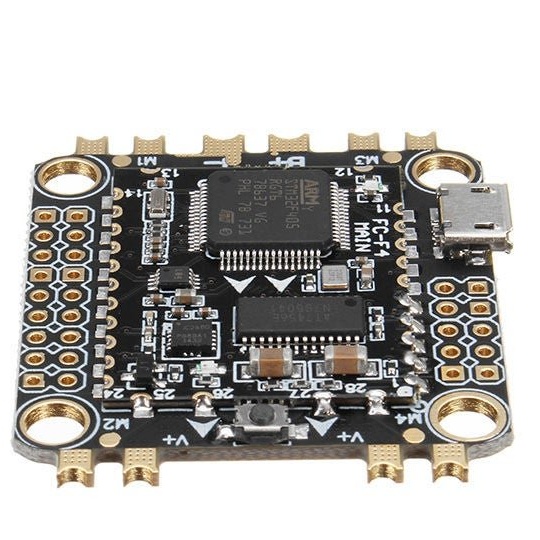
-Omnibus F4-controller, SP Racing F3;
-Mateck stroomverdeelbord;
- Controller HGLRC 28A BLHeli ESC - 4 stuks;
- Motor Racestar BR2204 2600Kv Racing Edition -4 stuks;
- Propellers KingKong 5X4X3 - 4 stuks;
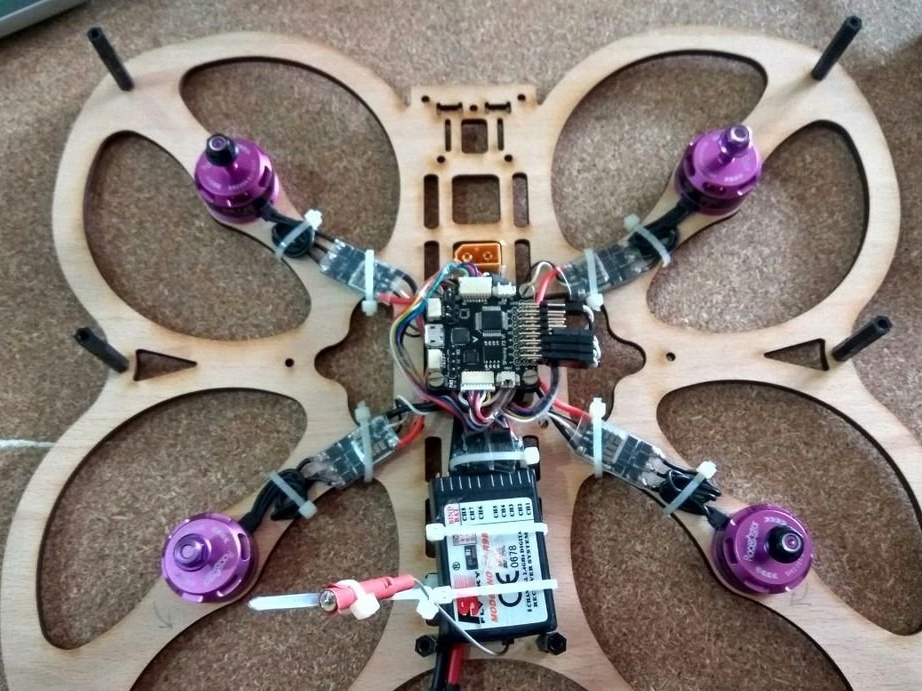
- Flsky TH9X radiomodule met ontvanger;
Batterij Gens 3800 mAh;
-Rekken; - 16 stuks;
-Schroeven M3;
- schroevendraaier;
-Soldeeraccessoires;
-Mes;
- CNC snijder;
Stap één: Materiaalselectie
Frame.
Het frame is meestal gemaakt van lichte en stijve componenten, zoals glasvezel, koolstofvezel, hout, aluminium, etc. Er zijn veel verschillende soorten frames, de master maakt een frame voor vier motoren.
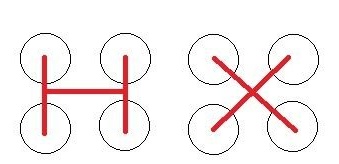
Dergelijke frames zijn voornamelijk in de H-vorm of X-vorm. De X-vorm is een goede balans tussen stabiliteit en wendbaarheid. Het is dit frame dat de meester zal maken.

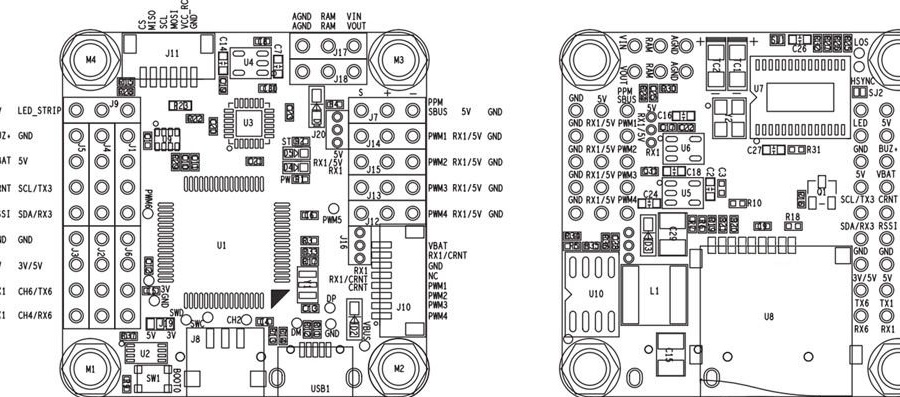
Controller
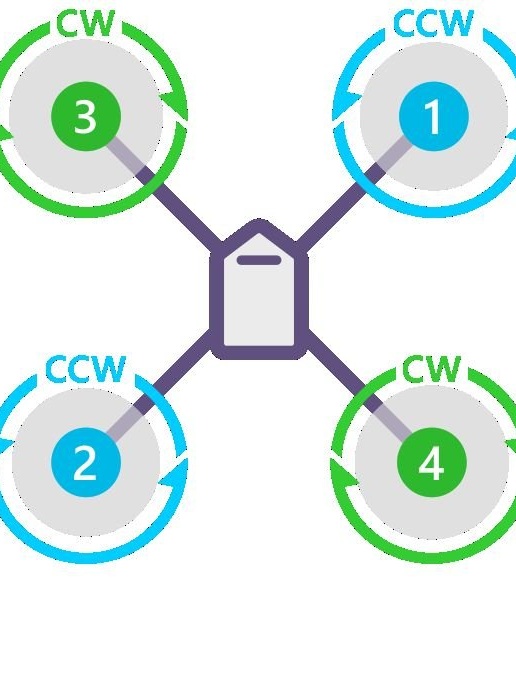
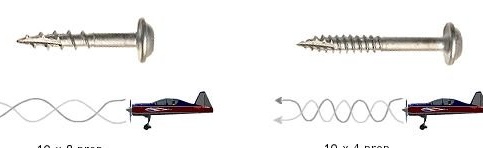
De controller regelt de werking van de motoren. Het diagram laat zien dat alle motoren in tegengestelde richting draaien om het door elke motor gegenereerde koppel te neutraliseren. De controller is het brein van een quadrocopter, het is eigenlijk een kleine computer die zijn sensoren gebruikt om constant de hoek en snelheid te meten.
Vluchtcontrollers worden voornamelijk geclassificeerd volgens processorspecificaties.

Motoren
Er zijn twee soorten motoren: borstelloze motoren en borstelloze motoren. De meeste quadrocopters gebruiken borstelloze motoren die zeer snel kunnen reageren op veranderingen in snelheid en koppelvereisten. Speciaal voor borstelloze motoren elektronisch snelheidsregelaar (ESC).
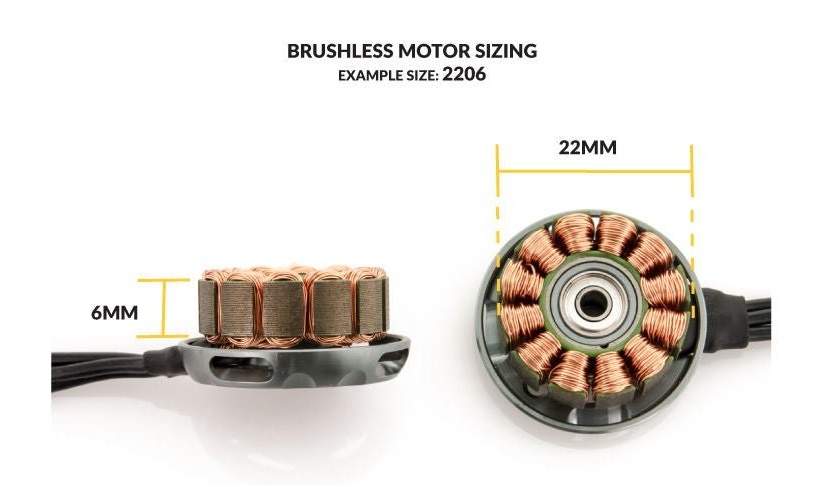
De grootte van borstelloze motoren wordt aangegeven door een 4-cijferig nummer - AABB. "AA" is de statorbreedte en "BB" is de statorhoogte of stator-diameter, beide in mm (millimeter). Zo heeft de Racestar BR2205 een stator met een diameter van ongeveer 22 mm en een hoogte van ongeveer 05 mm.
In feite geldt: hoe hoger de stator, hoe groter het vermogen bij hogere snelheden en hoe breder de stator, hoe groter het koppel bij lagere snelheden.
De KV-waarde van de motor geeft de snelheid aan waarmee de motor zal draaien als je 1 volt op zijn wikkelingen zet.Het wordt bepaald door het aantal wikkelingen van de koperdraad in de motorstator en de magnetische kracht van de magneten.
Minder wikkelingen betekenen minder weerstand en dus een hoger toerental. Dit is de reden waarom motoren met een hogere KV minder statorwikkeling hebben.
KV bepaalt welke schroef je kunt gebruiken met de motor. Hoe lager de KV, hoe groter de schroef die hij kan draaien en omgekeerd. Het is niet mogelijk om de hefkracht te vergroten door een grotere schroef op de motor met een hogere KV te installeren, omdat de koppelvereisten verder gaan dan het toegestane vermogen en de motor oververhit raakt.
Bijvoorbeeld: BR2205 2600 kV-motoren kunnen werken met 5x4 inch-schroeven en BR2212 1000 kV-motoren kunnen werken met 10x4.5-inch schroeven
KV is geenszins een indicator van het motorvermogen; motoren met een hogere KV zijn niet per se krachtiger dan motoren met een lagere KV.


Elektronische snelheidsregelaars (ESC).
Recente vooruitgang in mini-quadrocopters is mogelijk gemaakt door de komst van kleine elektronische snelheidsregelaars waarmee borstelloze motoren kunnen werken. De werking van elektronische snelheidsregelaars is om het gaspedaalsignaal van de vluchtcontroller te ontvangen en de motorrotatie op het vereiste toerental te houden.
Binnen deze kleine apparaten werken een aantal technologieën die buiten het bestek van deze handleiding vallen. Kies bij aankoop een ESC met een nominale gelijkstroom van ten minste 20% meer dan de berekende.


Propellers.
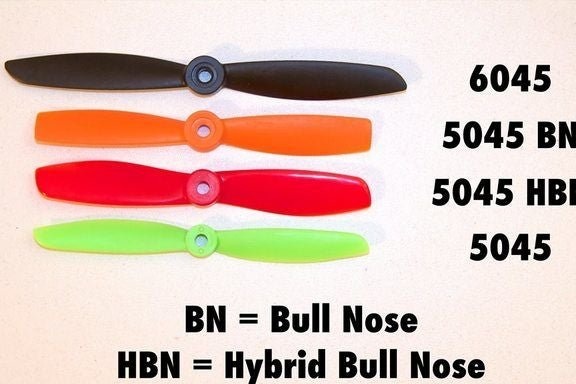
Propellers zetten de mechanische energie van motoren om in tractie. De grootte en vorm van de propeller spelen een grote rol in de vluchtefficiëntie.
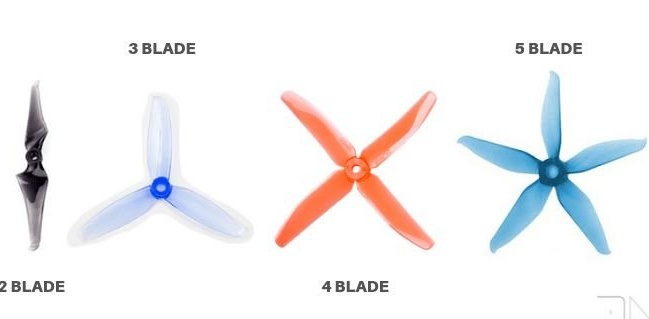
Er zijn 2 soorten formaten die fabrikanten gebruiken: L x P x B | LLPP x B. Waarbij L de lengte is, P de steek, B het aantal bladen.
De propellers kunnen worden gemaakt van verschillende materialen, zoals kunststofcomposiet, koolstofvezel, hout, enz. Elk type materiaal heeft unieke eigenschappen, bijvoorbeeld koolstofvezel en hout zijn echt stijf en staan bekend om hun soepele werking, en sommige kunststoffen zijn extreem duurzaam. De meeste schroeven die in mini-quadrocopters worden gebruikt, zijn gemaakt van plastic composieten.
De grootte van de propeller die u kunt gebruiken, wordt beperkt door de grootte van uw frame en het HF-vermogen van uw motor. In de regel geldt dat hoe meer propeller je kunt gebruiken om een bepaalde stuwkracht te creëren, hoe effectiever het zal zijn. Voor mini-quadrocopters variëren ze tussen 5-6 inch schroeven in stappen van 4-5 inch.
Het aantal messen beïnvloedt de tractie en het energieverbruik. Hoe meer bladen, hoe meer tractie en hoe meer energie er wordt verspild.

Batterijen
Momenteel gebruiken de meeste drones lithium-polymeerbatterijen, algemeen bekend als Lipo-batterijen. De batterij samen met de ESC en de motor is een quadrocopter-voedingssysteem.
Beschouw de batterij niet als een reservoir van energie, motoren kunnen in zeer korte intervallen een enorme hoeveelheid ampère trekken. LiPo-batterijen zijn een set cellen, die elk een nominale spanning van 3,7 V hebben. Als er een hogere spanning nodig is, kunnen deze cellen in serie worden geschakeld om één batterij te vormen. Batterijen die in serie zijn aangesloten, zijn gemarkeerd met de letter "S" en parallel met de letter "P".
Hoe meer cellen in serie zijn aangesloten, hoe hoger de spanning en hoe meer cellen parallel, hoe groter de capaciteit.
Bijvoorbeeld:
1S = 1 cel = 3,7 V
2S = 2 cellen = 7,4 V
3S = 3 cellen = 11,1 V.
4S = 4 cellen = 14,8 V
5S = 5 cellen = 18,5 V.
6S = 6 cellen = 22,2 V
Capaciteit wordt aangegeven in milliampère of "mAh". Dit is het aantal ampère dat een batterij in een uur kan leveren. Een 3S 2000 mAh-batterij kan bijvoorbeeld gedurende 1 uur 2 A leveren. dus als uw quadcopter 20A trekt, zal de vlucht 2/20 * 60min = 6 minuten duren.
Nominale ontlading geeft de maximale snelheid aan waarmee u stroom uit de accu kunt halen. Het wordt aangegeven met het cijfer "C" bovenaan. Hoe hoger de classificatie C, hoe groter de hoeveelheid stroom die de batterij kan geven.
Een batterij van 2000 mAh 25C kan bijvoorbeeld tot 2000x25 = 50.000 mA of 50 A leveren.



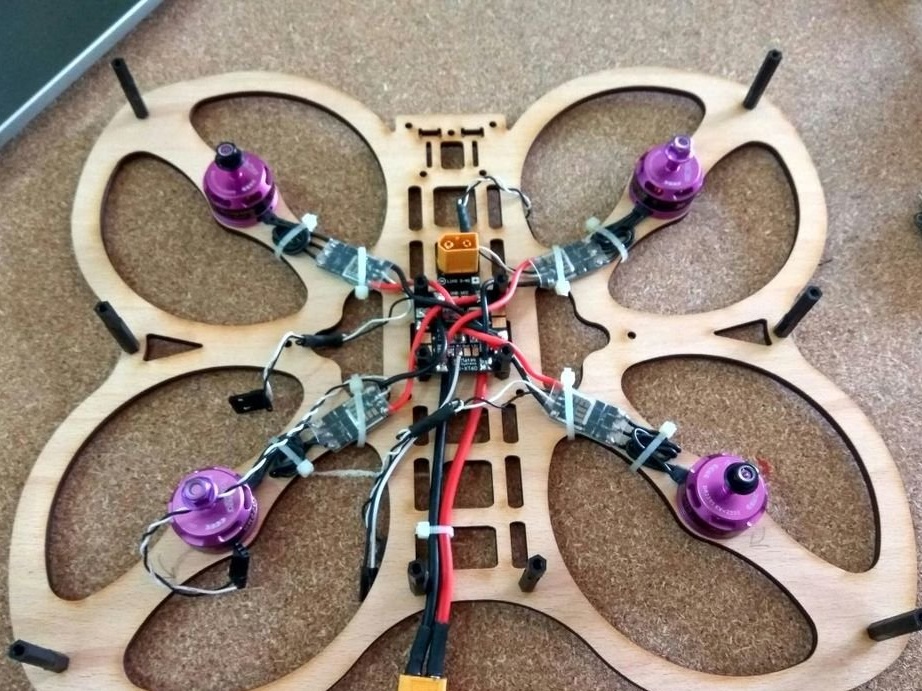
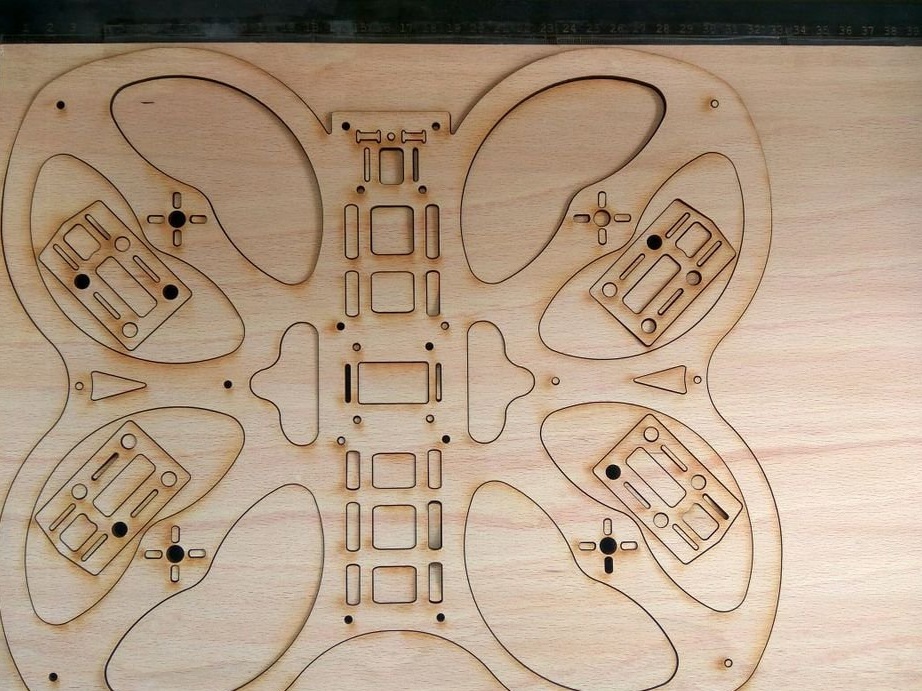
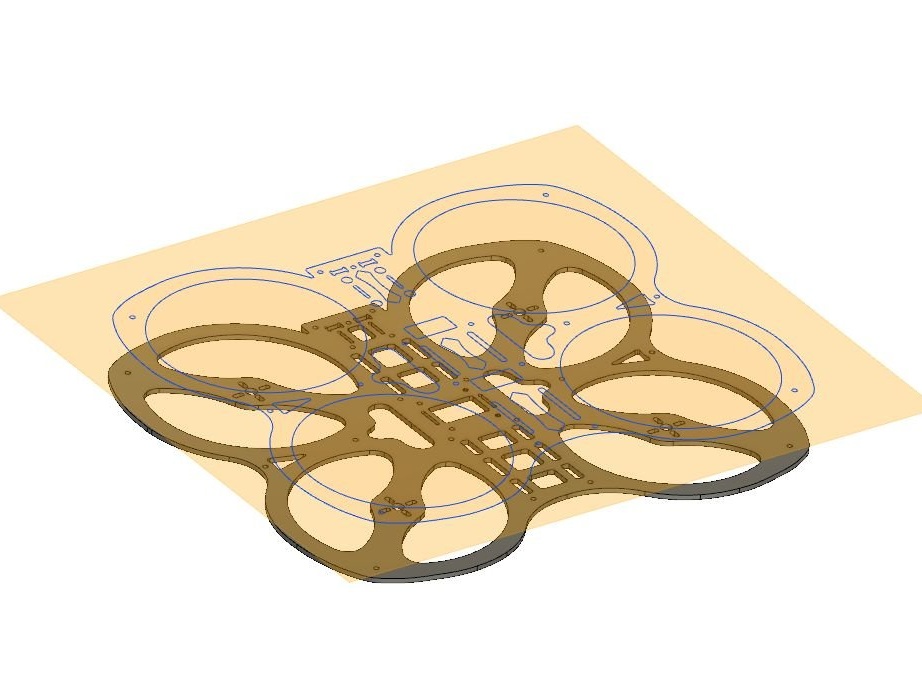
Stap twee: ontwerp en montage van het frame
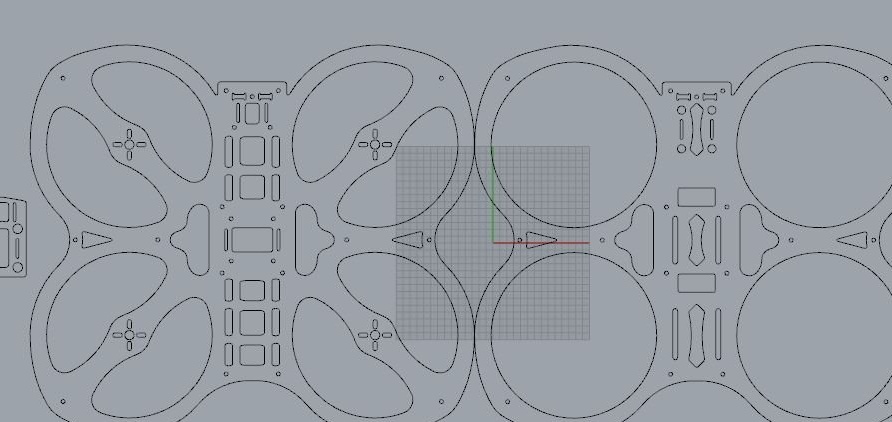
Het frameontwerp is geïnspireerd op de monarchvlindervorm.Als je van boven naar het frame kijkt, ziet het eruit als twee vleugels.
De tovenaar tekende het ontwerp in Fusion 360 en Rhino CAD. De framegrootte is ongeveer 230 mm, dit komt door de diagonale afstand van de ene motornaaf naar de andere. De meest populaire framematen zijn 210 mm, 250 mm, enz. Zodra u de framemaat heeft ingesteld, tekent u motorsteunen.
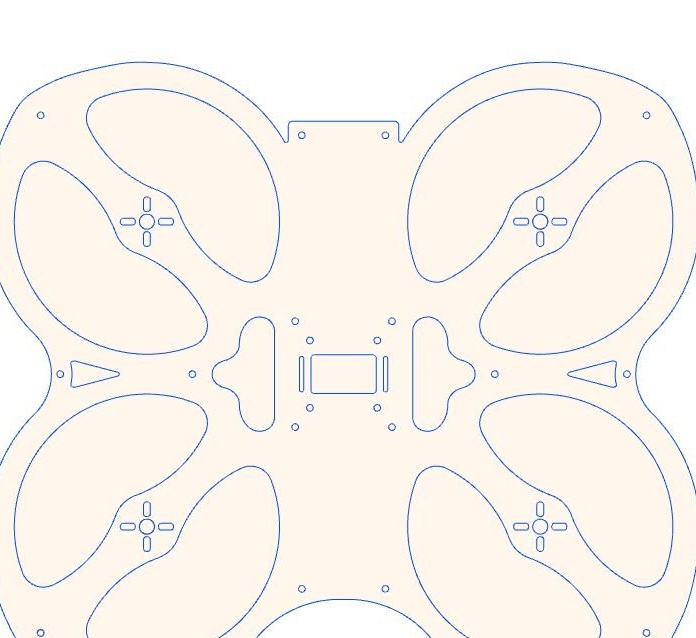
Het centrale gebouw is de plaats waar alle elektronica wordt geïnstalleerd, inclusief de vluchtcontroller, ontvanger, batterij, enz. Halverwege zijn er 4 M3-gaten op een afstand van 30,5 mm van elkaar.
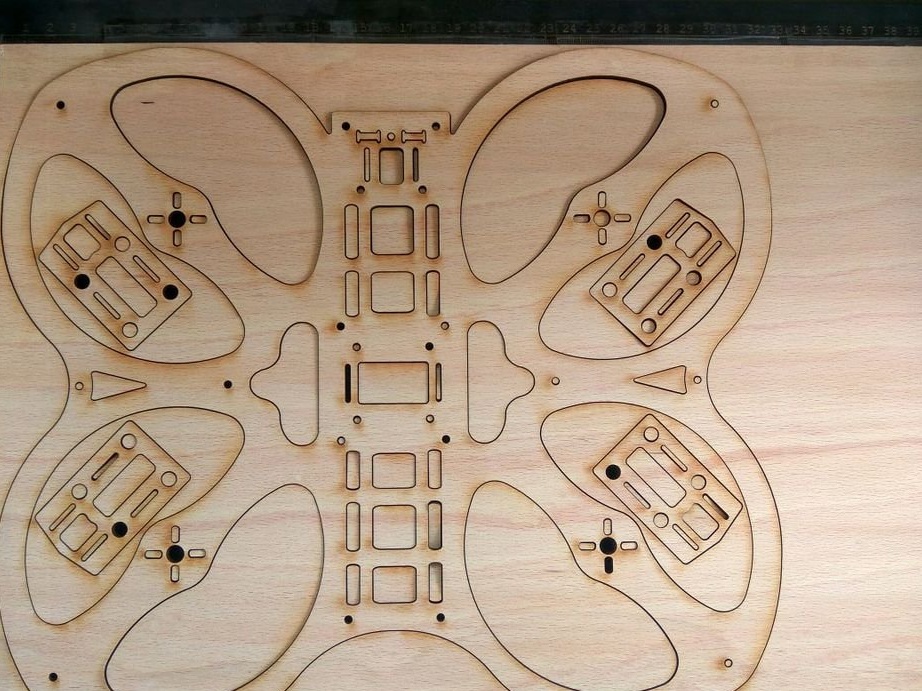
Het item is gemaakt met lasersnijden. Als je geen mes hebt, kun je in de werkplaats knippen. Het te knippen bestand kunt u hieronder downloaden.
Bestand Design.rar









Stap drie: bouwen
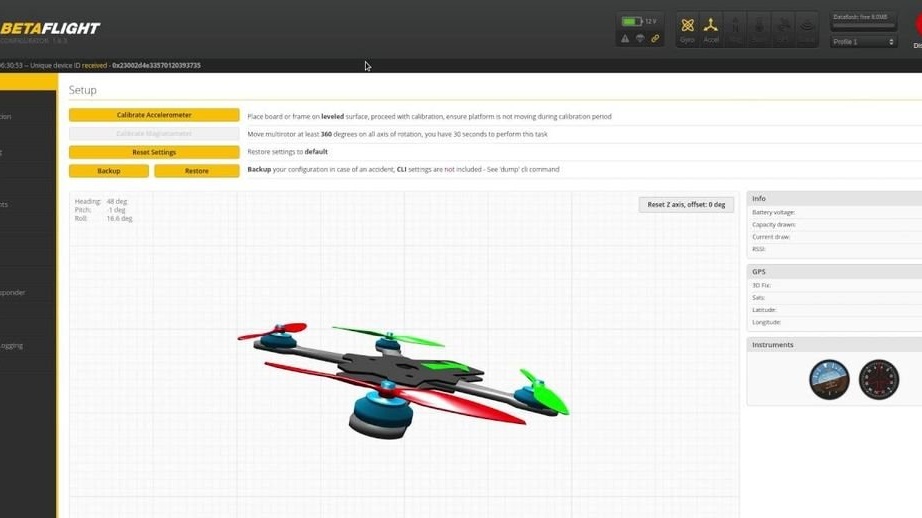
Nu moet je een quadrocopter monteren.
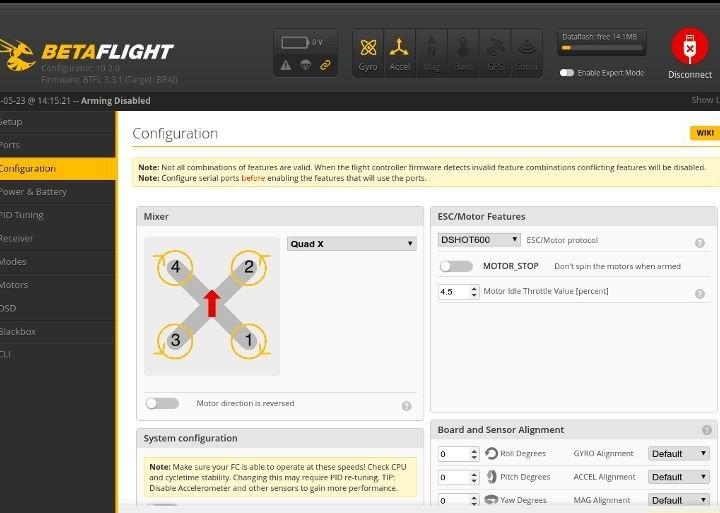
Eerst moet je de controller flashen met Betaflight-firmware. Kalibreer vervolgens de sensor. Sluit de radiomodule aan en controleer de werking. Monteer de motoren op het frame volgens het schema van het X-frame met de juiste draairichting. Soldeer de motordraden naar de ESC-klemmen en bevestig de ESC aan de beugel. Bevestig het stroomverdeelbord en soldeer de ESC-pads. Sluit de Soler XT60 aan op de voedingskabel en vervolgens op het stroomverdeelbord. Bevestig de controller. Sluit de draden van de ESC aan op de vluchtcontroller. Monteer de ontvanger op het frame. Zet op de bovenklep.