

Dit artikel bespreekt de fabricage van proportionele op een bord gebaseerde radiografische apparatuur Arduino. Een interessant kenmerk van het project is dat de apparatuur is bedacht als alternatief voor de "volwassen" apparatuur, maar die u zelf kunt maken. Op de zender zitten trimtoetsen, wat bijvoorbeeld belangrijk is voor de bediening modellen vliegtuig, de zender is ook uitgerust met een klein display met organische LED's, die basisinformatie over de werking van de zender weergeeft. De apparatuur is ontworpen voor 6 kanalen, 4 proportioneel en 2 discreet. De auteur legde ook de basis voor de toekomstige toevoeging van nog twee evenredige kanalen, er werden 2 potentiometers aan de zaak toegevoegd, maar op dit moment zijn ze er niet bij betrokken. Desalniettemin is dit voldoende om het model van een vliegtuig, schip of auto te besturen, en met afzonderlijke kanalen kunt u de extra belasting regelen, bijvoorbeeld de opname van koplampen, deklichten, navigatieverlichting of zelfs de lancering van kleine raketten. De apparatuur heeft twee besturingsmodi: lineair en exponentieel.
Voor de zender heb je nodig:
1 x Arduino NANO / UNO / ProMini
1 x BMS-beschermingsbord voor drie Li-ion-blikken
1 x 5,5 x 2,1 mm connector
1 x Step Up DC / DC-converter XL6009
1 x LM2596 kleine step-down converter (ik zal er apart over praten)
3 x 18650:
2 x joysticks JH-D202X (verkocht op Ali)
2 x tuimelschakelaar
1 x i2c OLED-scherm 0,96 inch 128X64
1 x NRF24l01 radiomodule met versterker en antenne
9 x toetstoets 6 * 6 * 5 mm
Uitgangsweerstanden (zie diagram)
Voor de ontvanger heb je nodig:
1 x Arduino NANO / UNO / Pro Mini
1 x radiomodule NRF24l01
1 x AMS1117 3.3V spanningsregelaar
30 x pls kammen
1 x broodplank
1 x 10 uF condensator
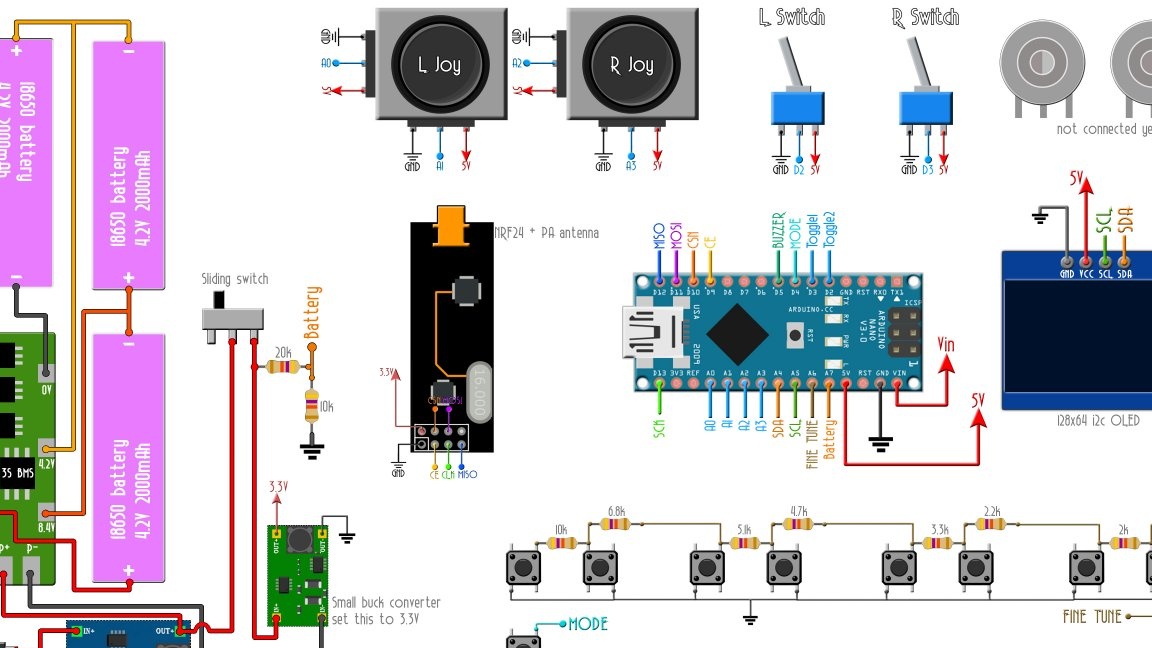
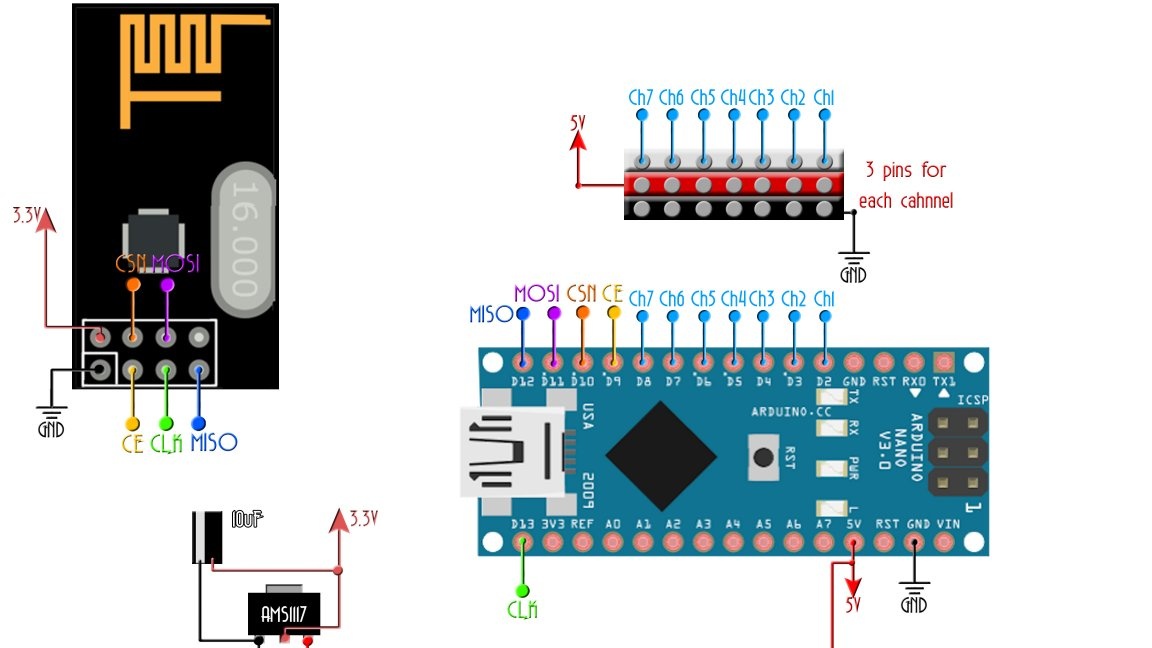
Hieronder ziet u een grafische afbeelding van alle componenten en een diagram van hun verbinding. Vóór de montage moeten buck-converters worden geconfigureerd, XL6009 tot 12,6 V (deze module is verantwoordelijk voor het opladen), LM2596 tot 3,3 V (voeding naar de radiomodule). In plaats van LM2596 is het theoretisch mogelijk om ASM117 te gebruiken, volgens het gegevensblad is de maximale ingangsspanning van deze stabilisator 15 V, maar het wordt aangeraden deze niet hoger dan 12 V aan te brengen. Blijkbaar heeft de auteur op basis van deze overwegingen een andere DC / DC-omzetter gebruikt. In plaats daarvan kun je ook een verstelbare stabilisator gebruiken, bijvoorbeeld LM317.
Wonen
De koffer bestaat uit twee hoofdonderdelen: de bovenste en onderste. Daarnaast worden 9 knoppen (8 voor trimmen en een modusknop), 5 back-ups voor knoppen, een schermrand en een stroomschuif afgedrukt.De auteur drukte een PLA af met een gum met 20% dekking, een mondstuk van 0,4 mm en een laaghoogte van 0,3 mm. Trouwens, niemand verbiedt het gebruik van een andere koffer, je kunt gewoon een geschikte doos nemen, deze zelf lijmen of een vrij grote koffer van een Chinees speelgoed nemen, ze worden bijna in tassen verkocht op geclassificeerde sites.
Zendermontage
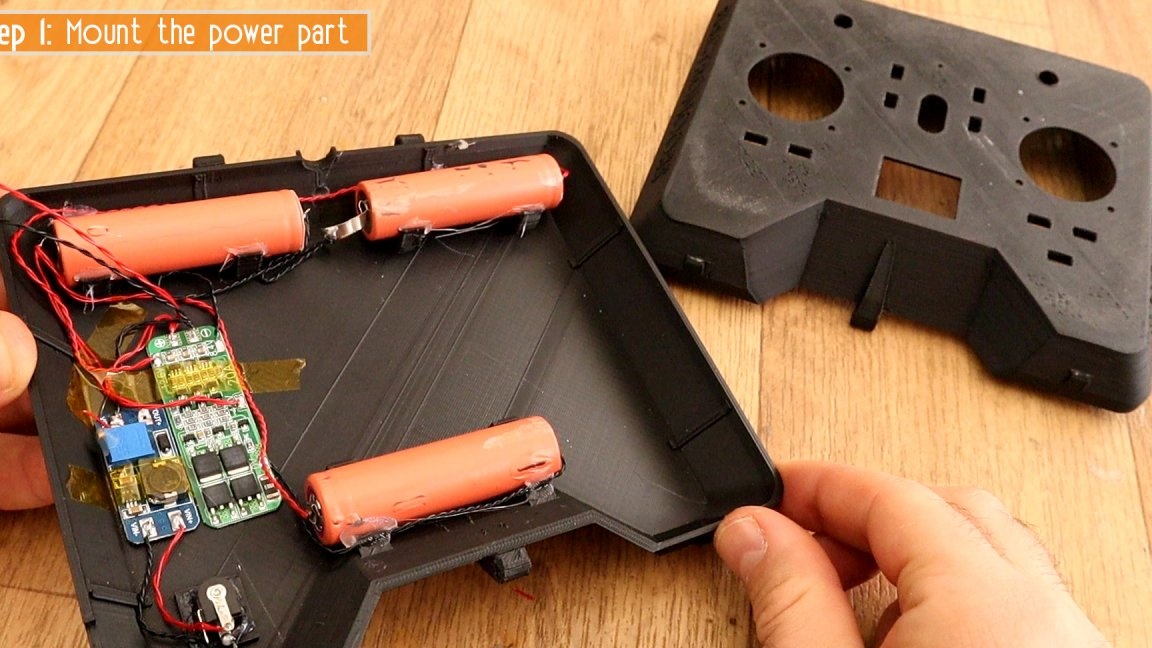
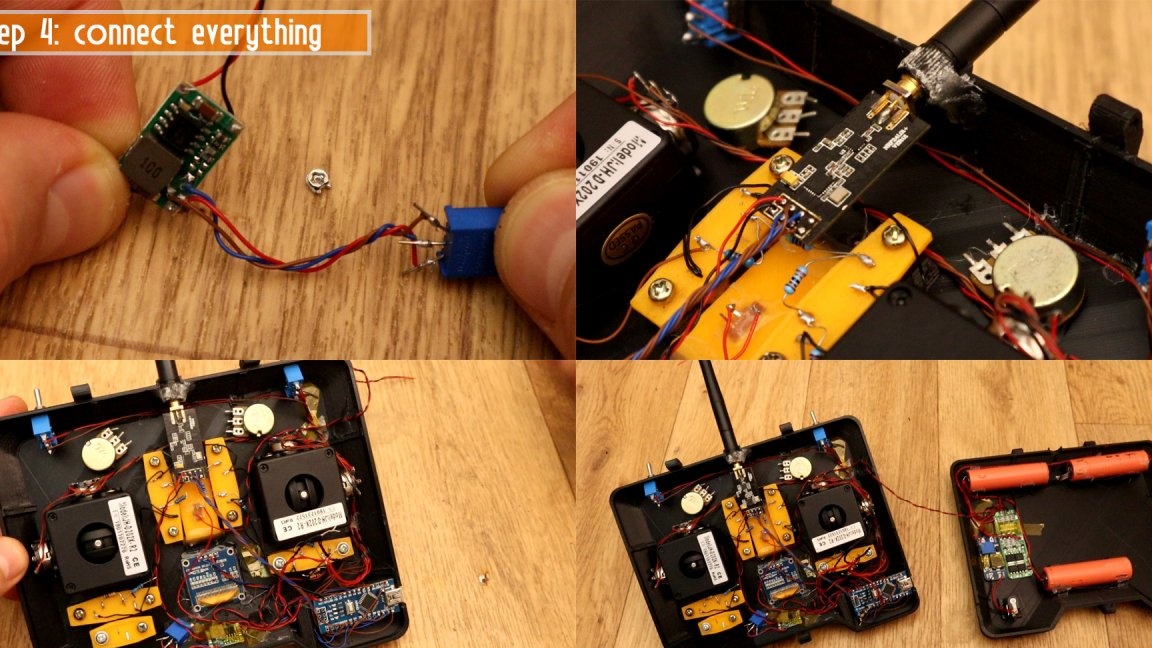
Batterijen zijn in serie geschakeld. De auteur deed dit met solderen, ik wil opmerken dat het solderen van blikjes van 18650 enige vaardigheid vereist, dus als je geen dergelijke ervaring hebt, koop dan batterijen met reeds gelaste bloembladen en soldeer eraan. Ook worden de batterijen volgens het bovenstaande schema gesoldeerd aan de GBS-module, waarvan de ingang wordt gevoed door de XL6009-omzetter (in plaats daarvan kan MT3608 worden gebruikt). De BMS is verantwoordelijk voor het gelijkmatig laden / ontladen van alle blikken en het uitschakelen van de stroom wanneer de batterijen leeg zijn. De spanning kan ook worden gecontroleerd via het display. De batterijen worden opgeladen door een 9 V voeding met een stroom van niet meer dan 3 A (maximum voor XL6009). In feite moet de laadstroom worden berekend afhankelijk van de capaciteit van de batterijen en de voeding met een iets lagere stroom opnemen of beperken. Het is handig om de modules in de behuizing te monteren met behulp van "auto" dubbelzijdige tape.
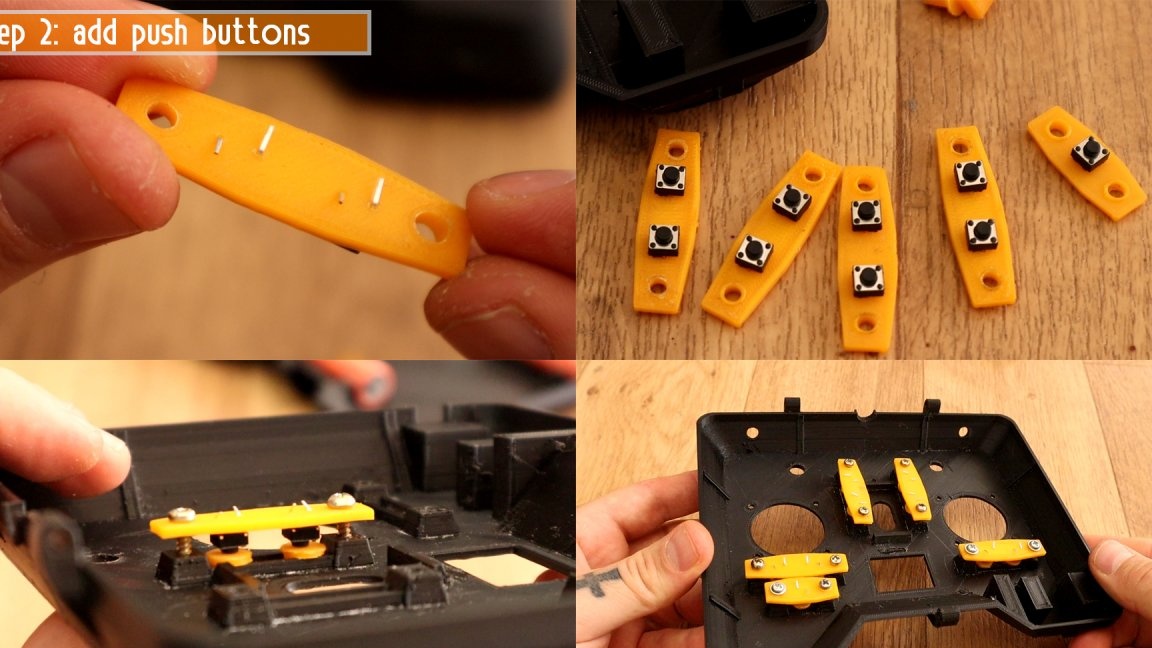
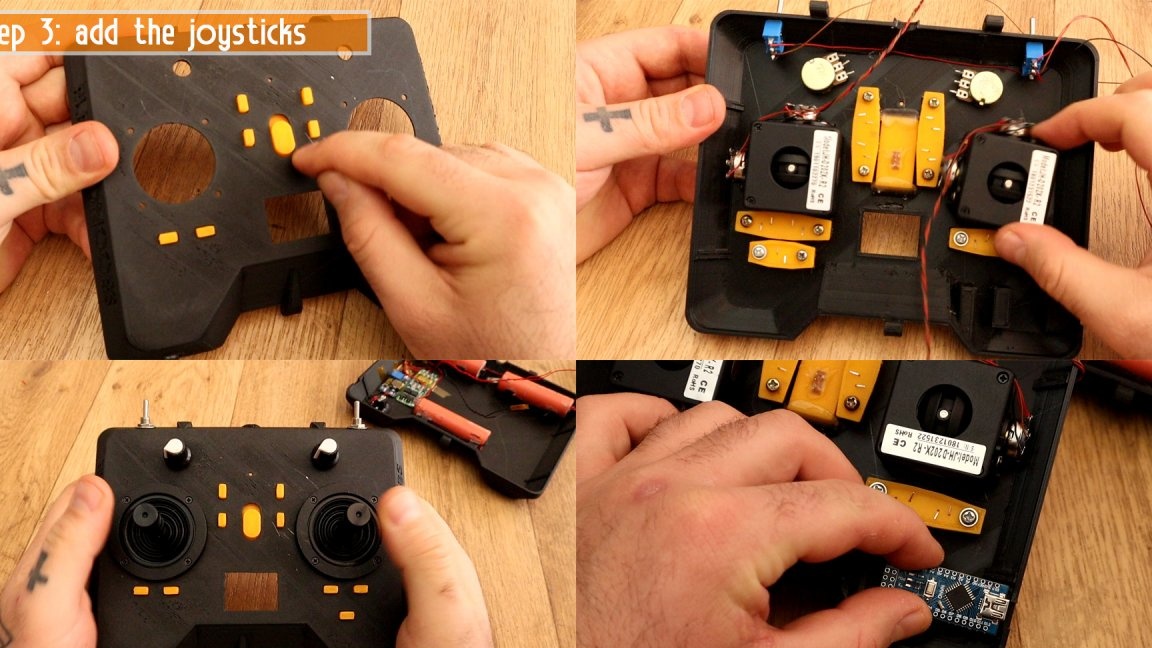
De klokknoppen worden op speciale platforms geïnstalleerd, waarna ze met kleine schroeven aan de bijbehorende steunen in de behuizing worden bevestigd. Hier bevindt zich in feite alles op het niveau van de ontwerper en wordt het goed begrepen vanaf de foto.
De knoppen zijn onderling verbonden door weerstanden, waardoor er in wezen een klein resistief toetsenbord overblijft, waarmee je slechts één pin van het Arduino-bord kunt gebruiken. De draden zijn gesoldeerd aan de joystickpotentiometers, de extreme draden gaan naar aarde en 5 V, het gemiddelde leidt naar de bijbehorende Arduino-pin. Ik heb plannen om dit schema te herhalen, ik heb al een beetje geëxperimenteerd en ik kan zeggen dat de code de functie heeft om automatisch kanalen om te keren als dat nodig is, maar ik heb nog niet begrepen hoe het schema deze behoefte bepaalt. Dit wil zeggen dat de kanaalinversie in wezen wordt uitgevoerd door op sommige plaatsen de extreme conclusies te solderen. Dergelijke joysticks worden op het moment van schrijven in Ali verkocht voor een prijs van ongeveer $ 7 per stuk, of het nu aan jou is of het aan jou is of niet. In plaats daarvan kunt u de joystickmodules gebruiken voor Arduino of joysticks van gamecontrollers.
In feite werkt de joystick als een deler, door het handvat af te buigen, veranderen we de spanning aan de middelste uitgang van de potentiometer, en afhankelijk van deze spanning bepaalt de arduino de afwijking.
[center] [/ center]
Tuimelaars zijn ook aangesloten. Tuimelschakelaars zijn aan-uit nodig, omdat het kanaal discreet is en slechts twee waarden heeft - 0 of 1, afhankelijk van of de output van de arduino wordt aangetrokken door de grond of door een 5V-voeding. Bovendien is de aan-uit-schakelaar nodig, als je de output laat "hangen in de lucht", wat er zou gebeuren bij het gebruik van drie positionele, de controller begrijpt niet wat er gebeurt en de waarde springt willekeurig 0 of 1 (in mijn ervaring). U kunt geen extra potentiometers instellen, op het moment dat ze er niet bij betrokken zijn. Of u kunt de bronpagina plaatsen en controleren, misschien zal de auteur uiteindelijk de bijgewerkte firmware plaatsen.
In feite werkt de joystick als een deler, door het handvat af te buigen, veranderen we de spanning aan de middelste uitgang van de potentiometer, en afhankelijk van deze spanning bepaalt de arduino de afwijking.
[center] [/ center]
Tuimelaars zijn ook aangesloten. Tuimelschakelaars zijn aan-uit nodig, omdat het kanaal discreet is en slechts twee waarden heeft - 0 of 1, afhankelijk van of de output van de arduino wordt aangetrokken door de grond of door een 5V-voeding. Bovendien is de aan-uit-schakelaar nodig, als je de output laat "hangen in de lucht", wat er zou gebeuren bij het gebruik van drie positionele, de controller begrijpt niet wat er gebeurt en de waarde springt willekeurig 0 of 1 (in mijn ervaring). U kunt geen extra potentiometers instellen, op het moment dat ze er niet bij betrokken zijn. Of u kunt de bronpagina plaatsen en controleren, misschien zal de auteur uiteindelijk de bijgewerkte firmware plaatsen.
Vervolgens worden een arduino, een radiomodule en een voedingsbord van een radiomodule geïnstalleerd. Zoals hierboven beschreven, moet er een spanning van 3,3 volt op worden ingesteld. Het is bijna onmogelijk om dit te doen met een standaard variabele weerstand, dus de auteur heeft het gesoldeerd en in plaats daarvan een multi-turn trimmer gesoldeerd. Vervolgens wordt het display gemonteerd en worden alle componenten volgens het diagram aangesloten op de arduino-terminals.
Firmware
Arduino-firmware is al 1000 keer besproken, op dit moment is de mogelijkheid om dit te doen terwijl je een arduino-project vasthoudt standaard net zo belangrijk als het vermogen om een soldeerbout in je handen te houden terwijl je iets vasthoudt aan soldeer.De code voor de zender, ontvanger, benodigde bibliotheken en een bestand voor 3D-printen van de case kunnen aan het einde van het artikel in één archief worden gedownload.
Ontvanger
Voor de ontvanger heb je nog een Arduino-bord nodig, een radiomodule (zonder antenne, telemetrie is hier nog steeds niet geïmplementeerd) en een 3,3 volt-stabilisator. De ontvanger is aan het breadboard gesoldeerd. Het vermogen van de ontvanger wordt op dezelfde manier uitgevoerd als het vermogen van elke andere fabrieksontvanger, via een speciale uitgang van de snelheidsregelaar.

Zelf wil ik hieraan toevoegen dat het in plaats van de standaard antenne van deze module wenselijk is om dezelfde antenne die in de module is geïnstalleerd te solderen met een versterker (alleen zonder behuizing). Dit zal niet bepaald het ontvangstbereik beïnvloeden, maar zal de ontvangstkwaliteit aanzienlijk beïnvloeden, afhankelijk van de positie van het gecontroleerde model in verschillende vlakken. Voor moderne ontvangers en zenders zijn hiervoor zelfs twee antennes geïnstalleerd, die loodrecht op elkaar staan.
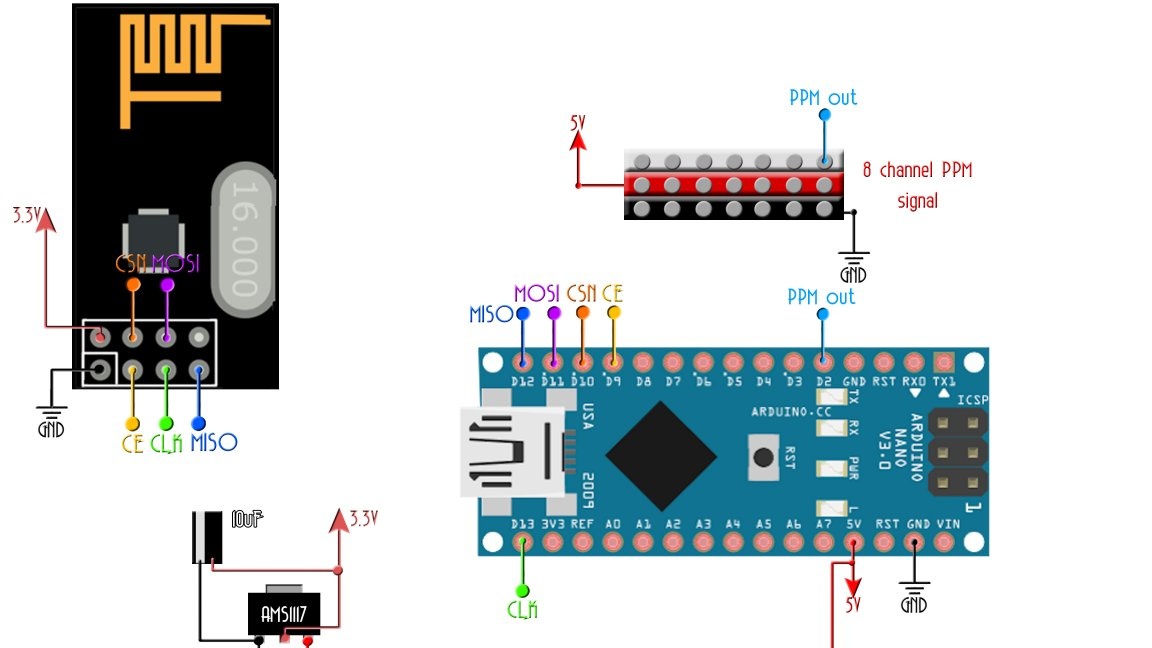
Bovendien heeft de auteur een zeer belangrijke functie geïmplementeerd: uitvoer van het PPM-ontvangersignaal. Schematisch verandert er niets, u hoeft alleen maar een andere firmware in te vullen, het PPM-signaal wordt op dezelfde manier uitgevoerd als in de meeste fabrieksontvangers - vanaf het eerste kanaal (gas).
Dat is alles. Persoonlijk vond ik het project erg leuk, en zoals ik al zei, ben ik van plan het in het geval te herhalen met de afstandsbediening van een kinderspeelgoed. In het menu kun je de modus selecteren van lineair tot exponentieel en de waarde van elke stick verfijnen. Houd er rekening mee dat de gemiddelde waarde van elk kanaal 127 moet zijn.
Je kunt alles downloaden wat je nodig hebt hier.
Alle succes in het werk!