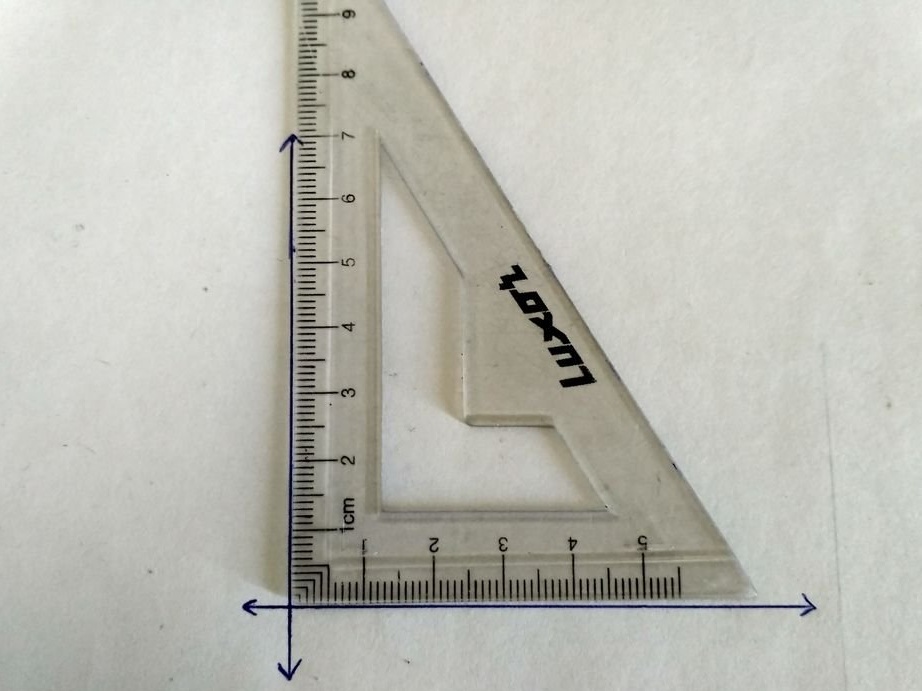

De wizard heeft een apparaat gemaakt dat werkt als een digitaal niveau + liniaal + gradenboog + meetlint. Het apparaat is klein genoeg om in een zak te passen en de batterij is eenvoudig op te laden met een telefoonoplader.
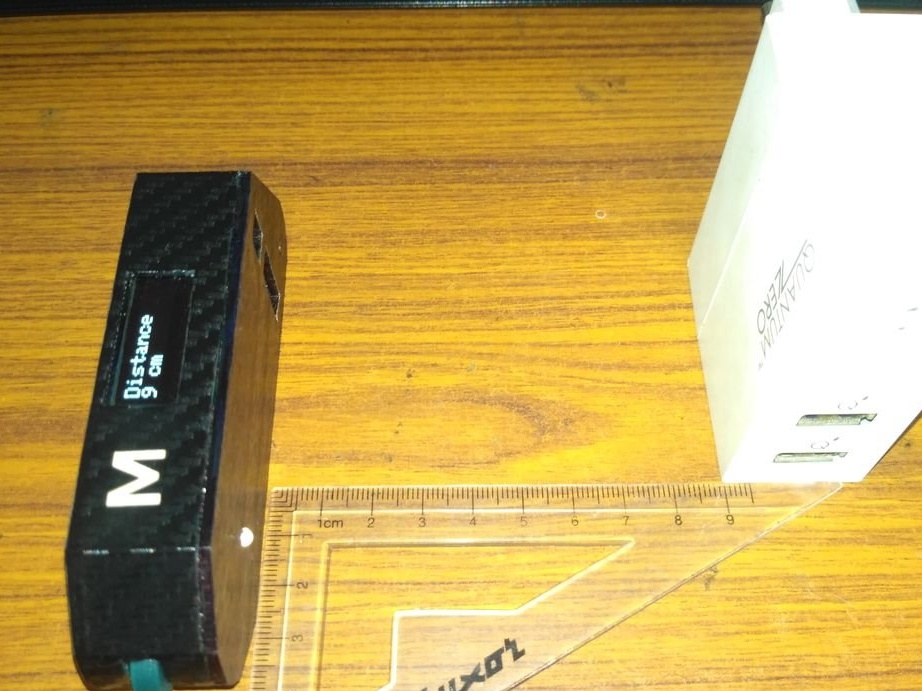
Dit apparaat maakt gebruik van een versnellingsmeter en een gyroscoopsensor om nauwkeurig niveau en hoek te meten, een IR-sensor voor contactloze meting van lineaire lengte van 4 tot 30 cm, een sensor met een wiel dat over een gebogen oppervlak kan worden gerold of een gebogen lijn om de lengte van een object te meten.
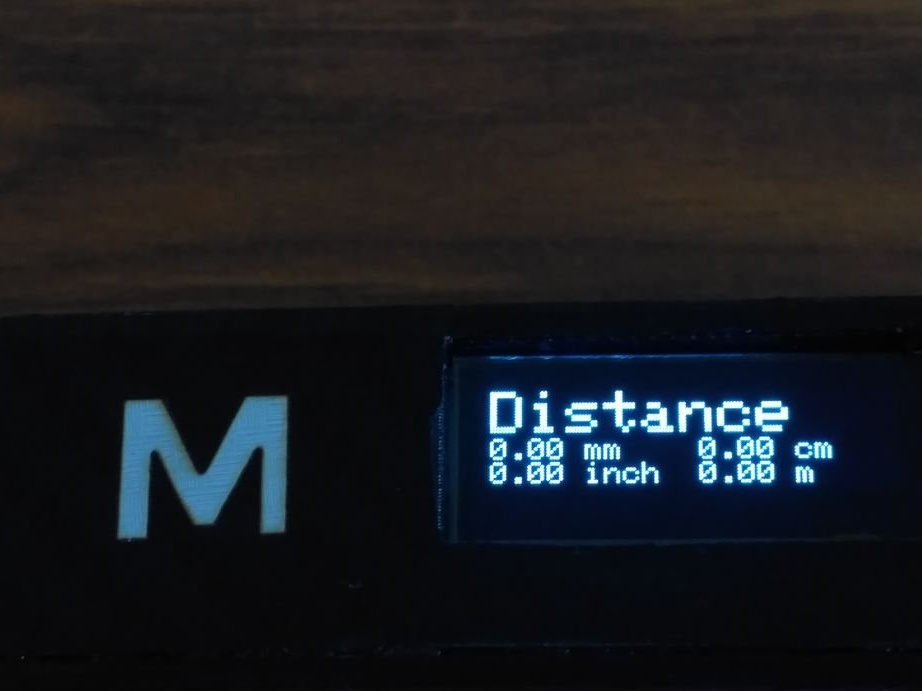
Navigatie door de modi en functies van het apparaat wordt uitgevoerd met behulp van de aanraaktoetsen, aangeduid als M (modus), U (eenheid) en 0 (nul).
M - keuze tussen verschillende soorten metingen
U - om te kiezen tussen maateenheden mm, cm, inches en meter
0 - Reset meetwaarden naar 0 na het meten van afstand of hoek.
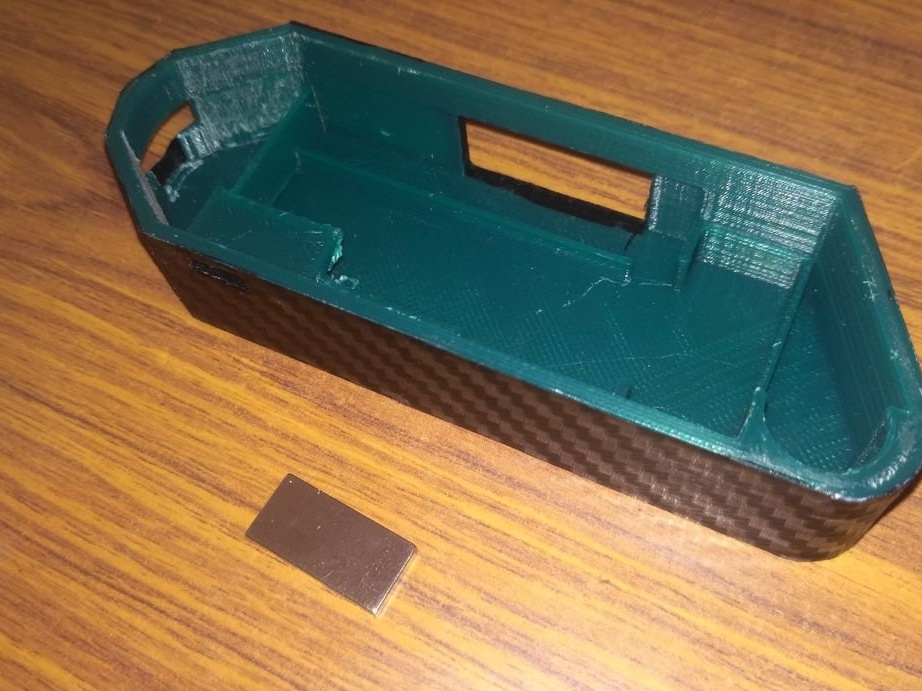
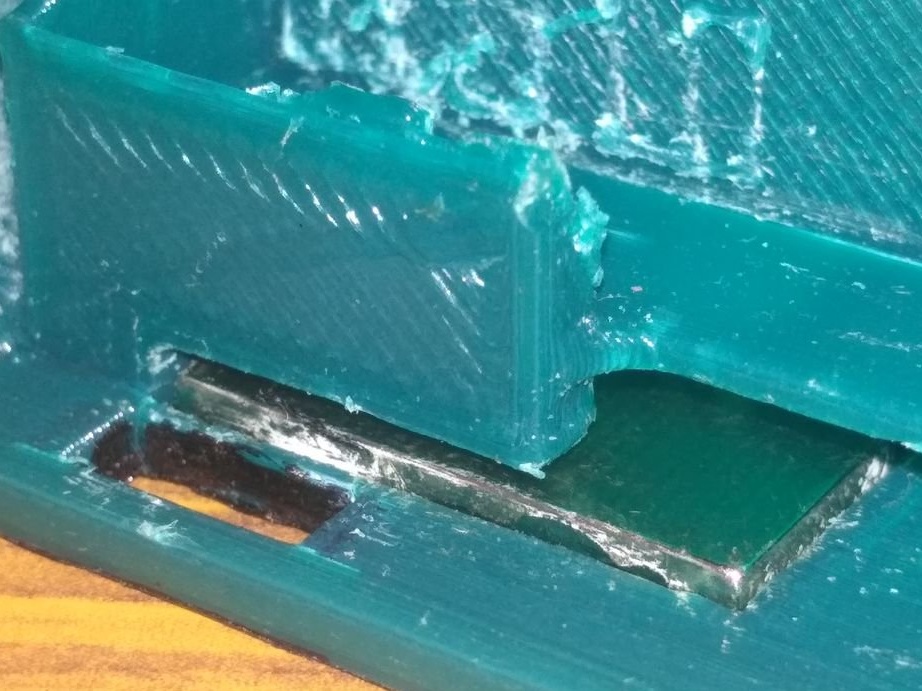
Het apparaat heeft een neodymiummagneet ingebouwd in de basis, zodat deze niet wegglijdt en niet van het te meten metalen oppervlak glijdt.
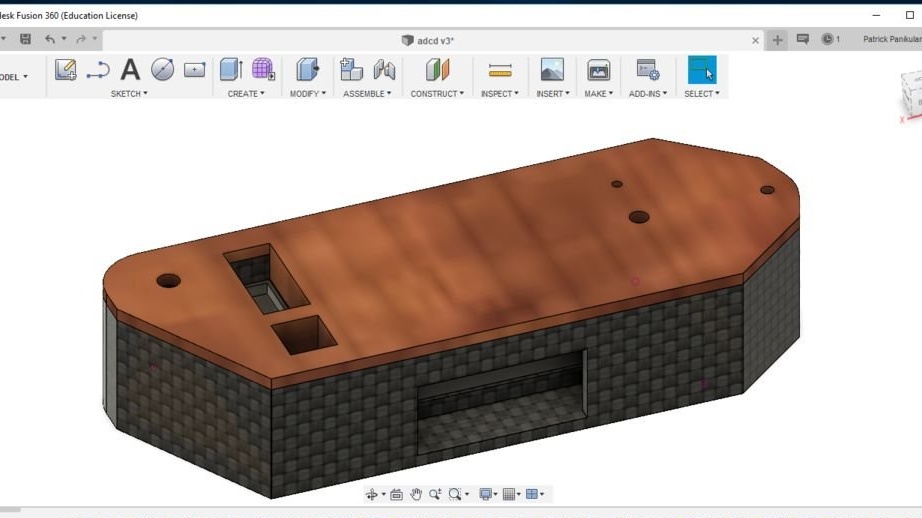
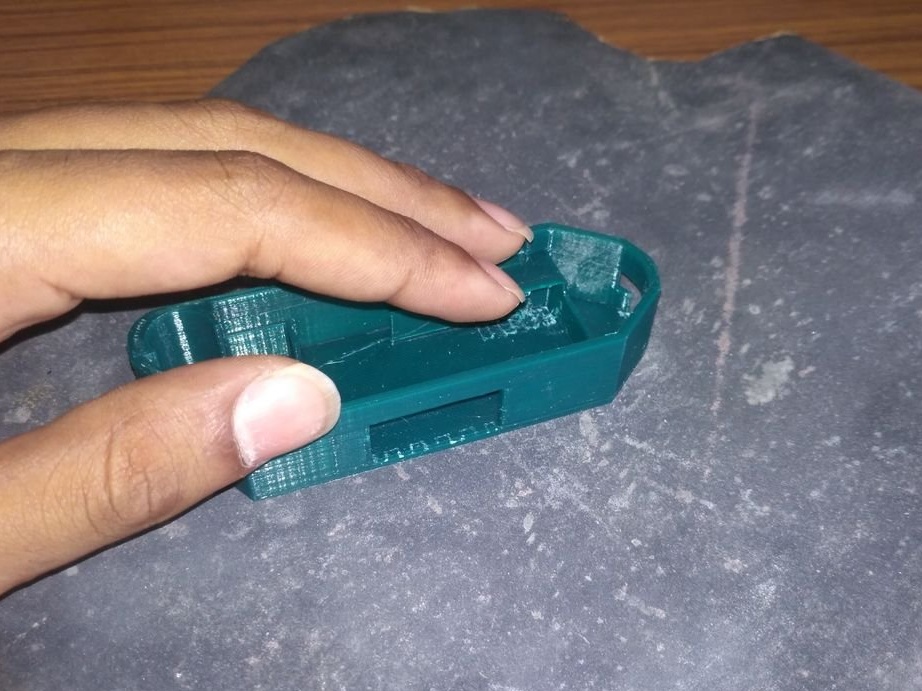
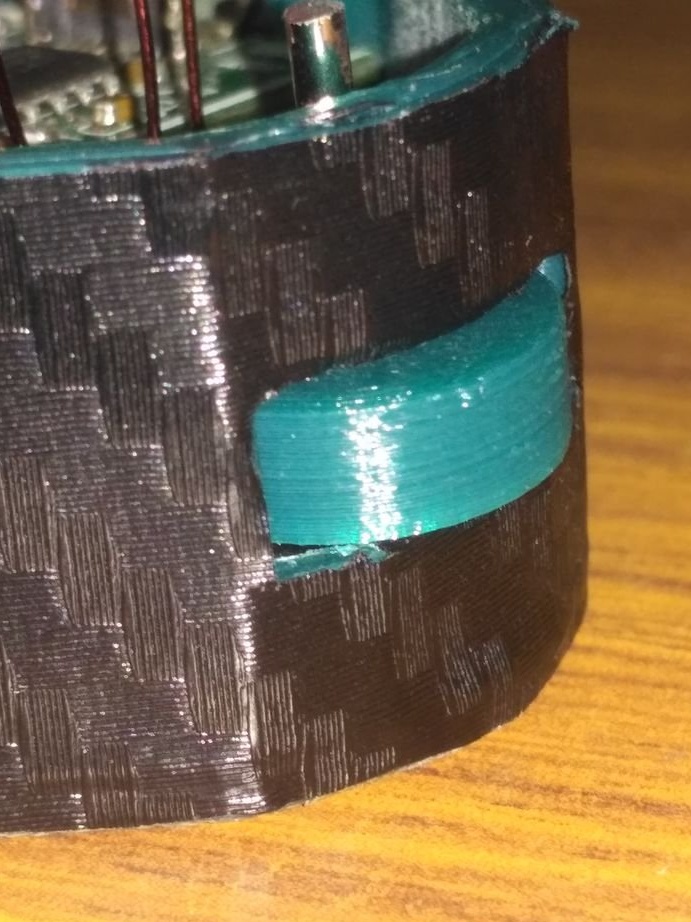
De case is ontworpen om het toestel zo compact mogelijk te maken.
Laten we een video bekijken met voorbeelden van hoe het apparaat werkt.
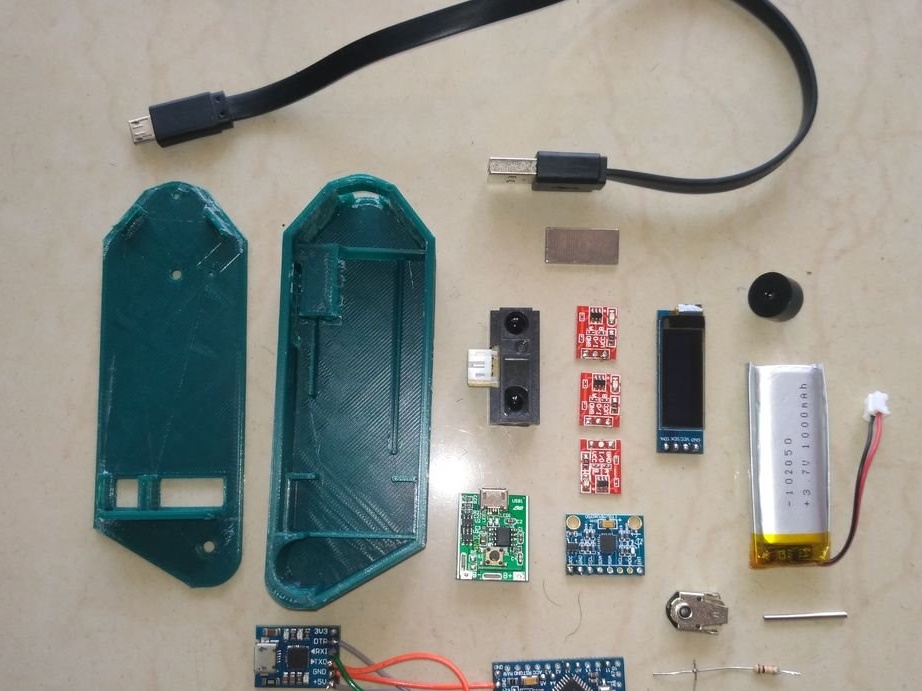
Gereedschap en materialen:
-IR afstandssensor Sharp GP2Y0A41SK0F;
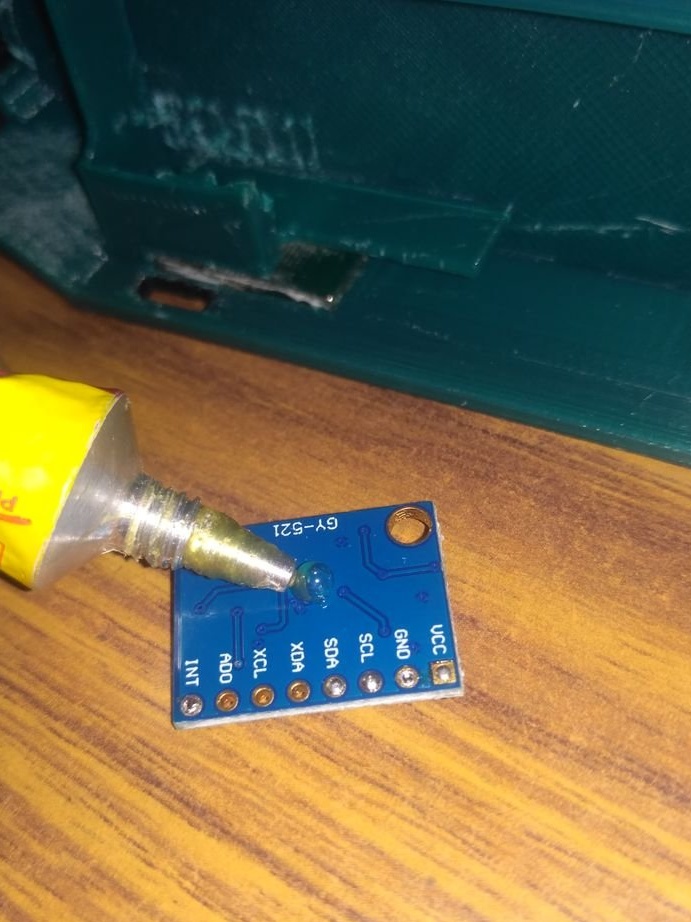
- Module MPU6050 versnellingsmeter / gyroscoop;
-Charge module;
Encoder
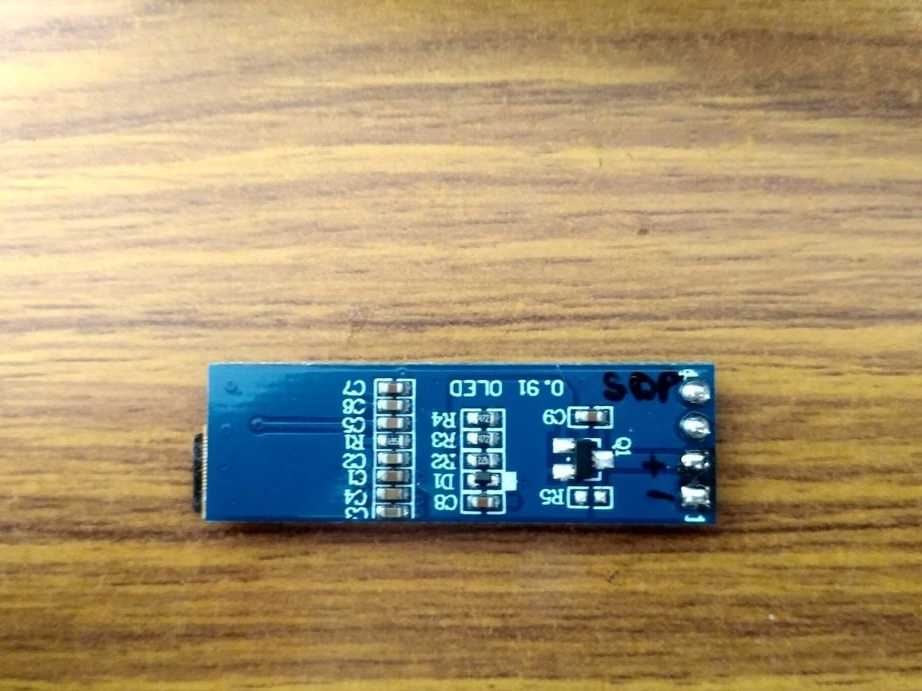
-128 X 32 OLED-scherm;
-Arduino pro mini ATMEGA328 5 V / 16 MHz;
-12 mm zoemer;
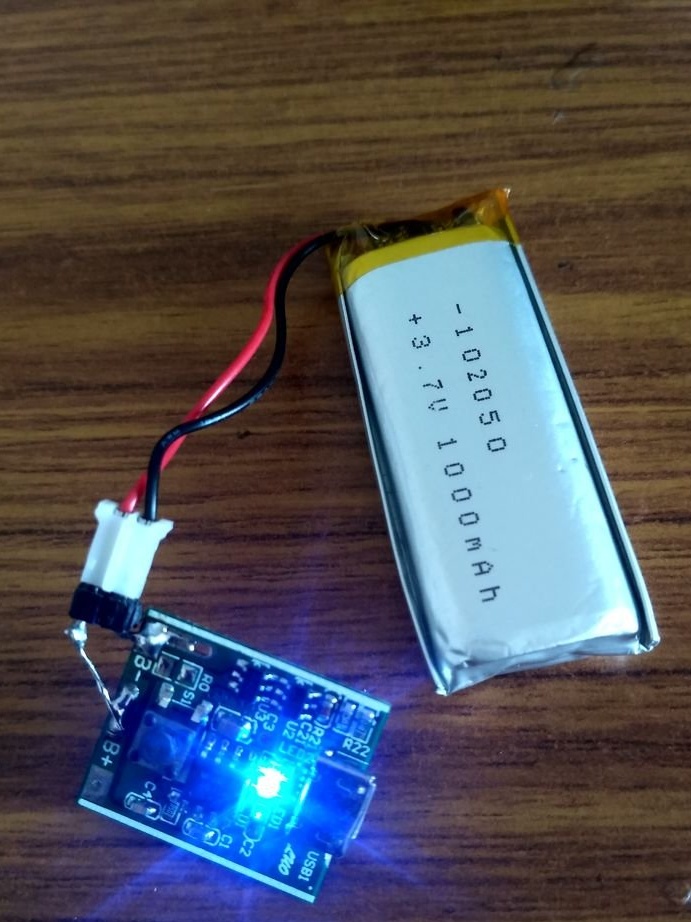
-3,7 V, 1000 mAh lithium-polymeer batterij;
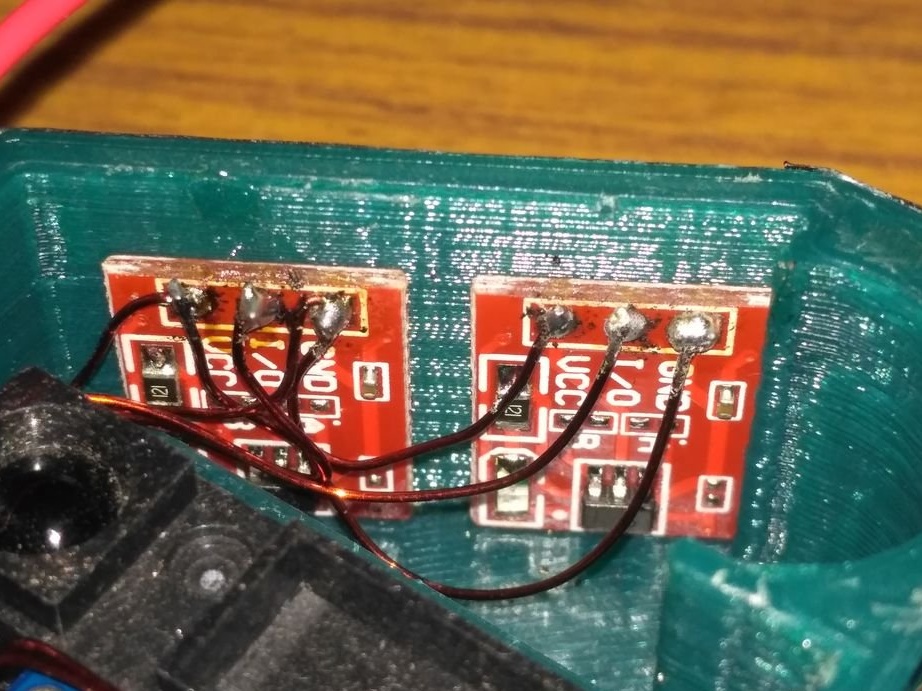
- TTP223 touch button module - 3 stuks;
- Neodymium magneet 20x10x2 mm;
-Converterinterface CP2102;
Geëmailleerde koperdraad;
-Weerstanden 10K - 2 stuks;
- Stalen staaf 19 mm lang met een diameter van 2 mm;
-LED LED;
-Vinylfilm;
- Micro-USB-kabel;
- schaar;
-Mes;
- pincet;
-Lijmpistool;
-Super-lijm;
-Soldeeraccessoires;
-Lasersnijder;
- 3D-printer;
-Nippers;
-Afvalpapier;

Stap één: de zaak
Eerst drukt de wizard een case af op een 3D-printer. Af te drukken bestanden kunt u hieronder downloaden.
BODY.stl
Lid.stl
wheel.stl
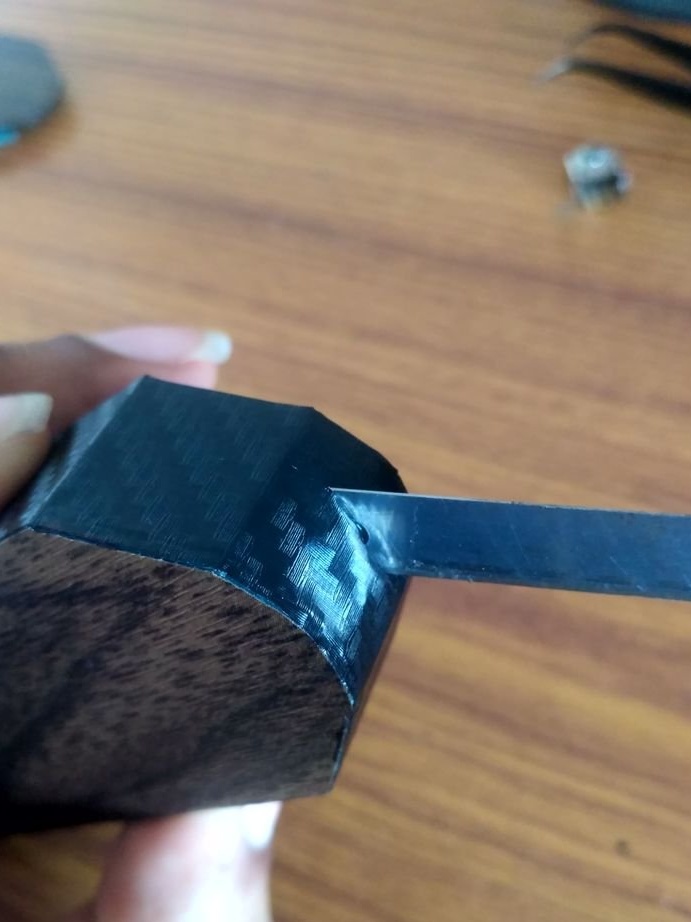
Het verlijmt de behuizing met vinylfilm, waarbij het oppervlak eerder werd geschuurd.







Stap twee: regeling
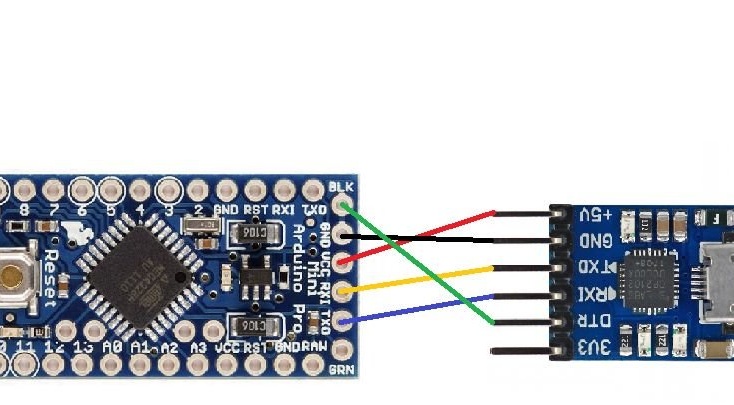
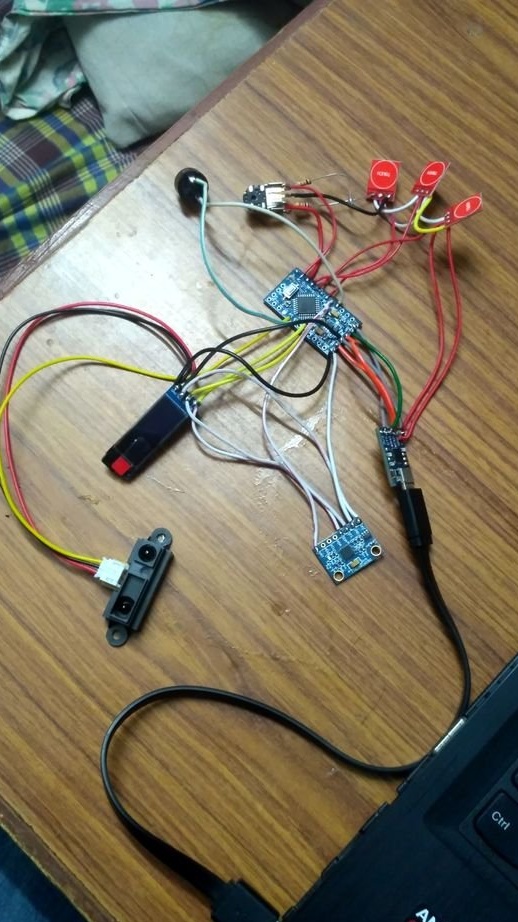
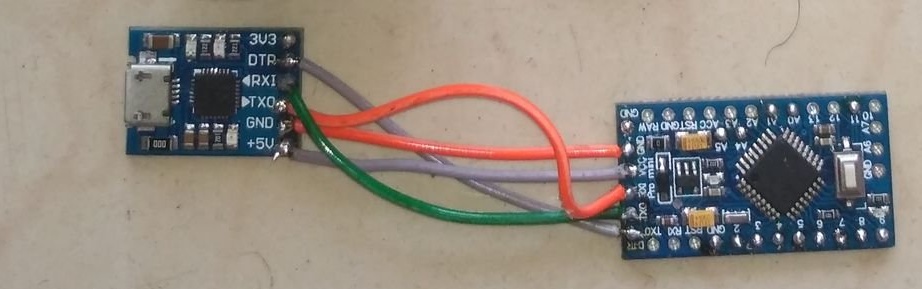
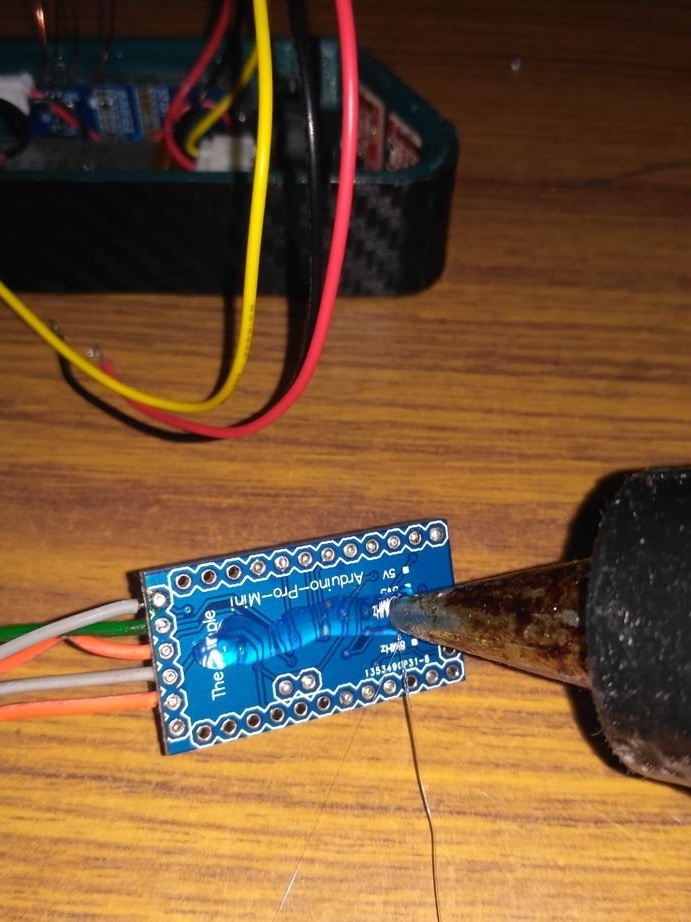
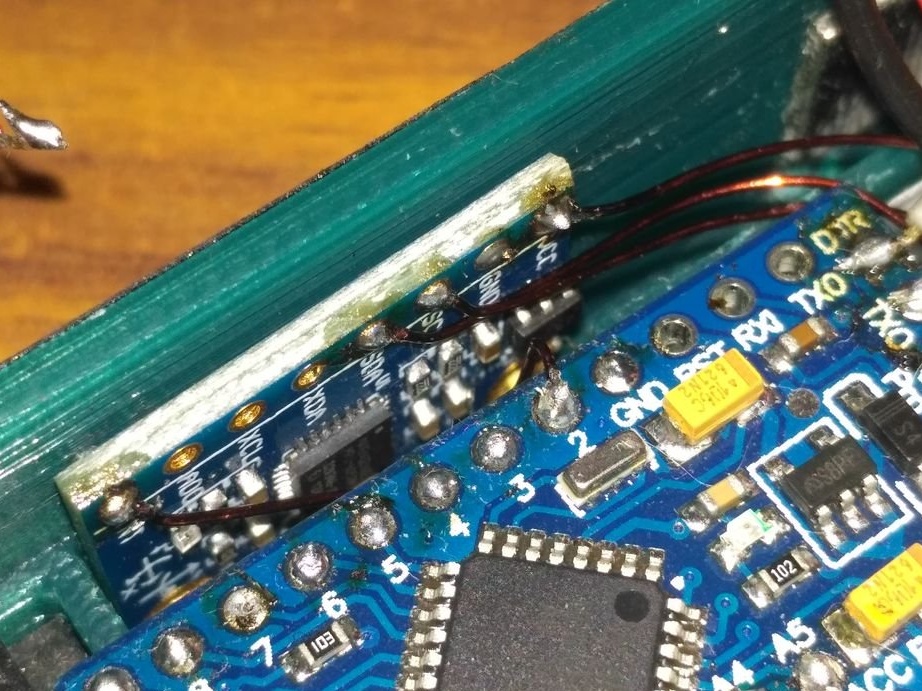
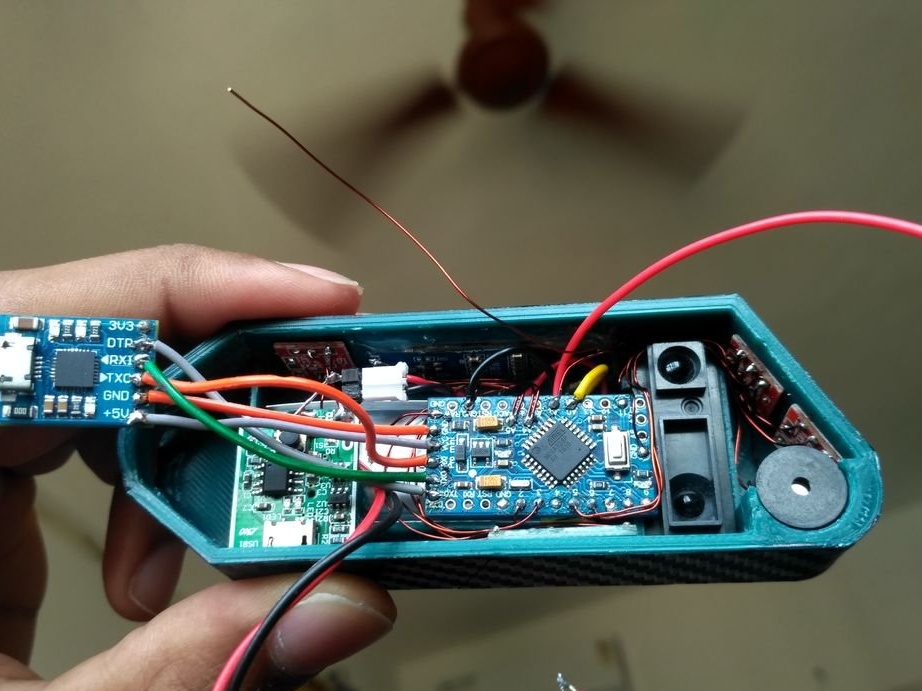
In tegenstelling tot Arduino nano, pro mini kan niet rechtstreeks worden geprogrammeerd door een USB-kabel aan te sluiten. Daarom moet je eerst een externe USB aansluiten op de pro mini converter om deze te kunnen programmeren. De eerste foto laat zien hoe deze verbindingen gemaakt moeten worden.
Vcc - 5V
GND - GND
RXI - TXD
TXD - RXI
DTR - DTR
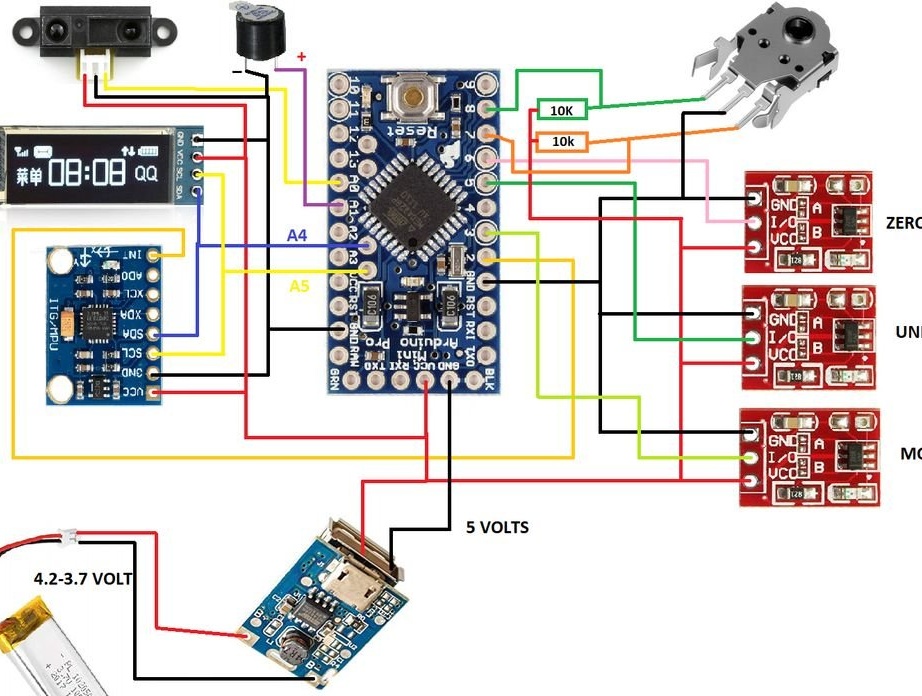
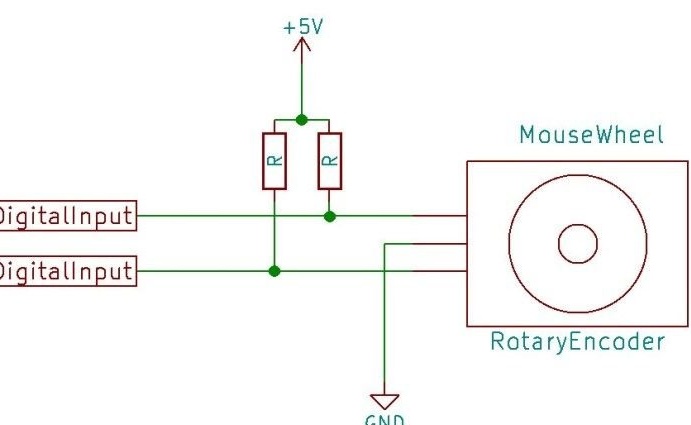
De 2e afbeelding toont het volledige schakelschema van dit project.
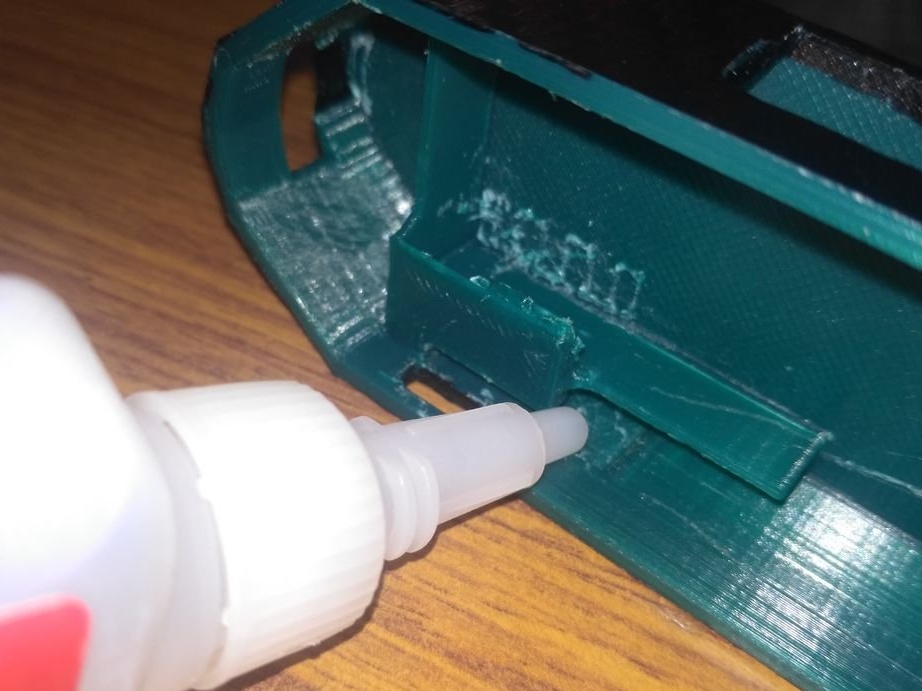
Stap drie: magneet
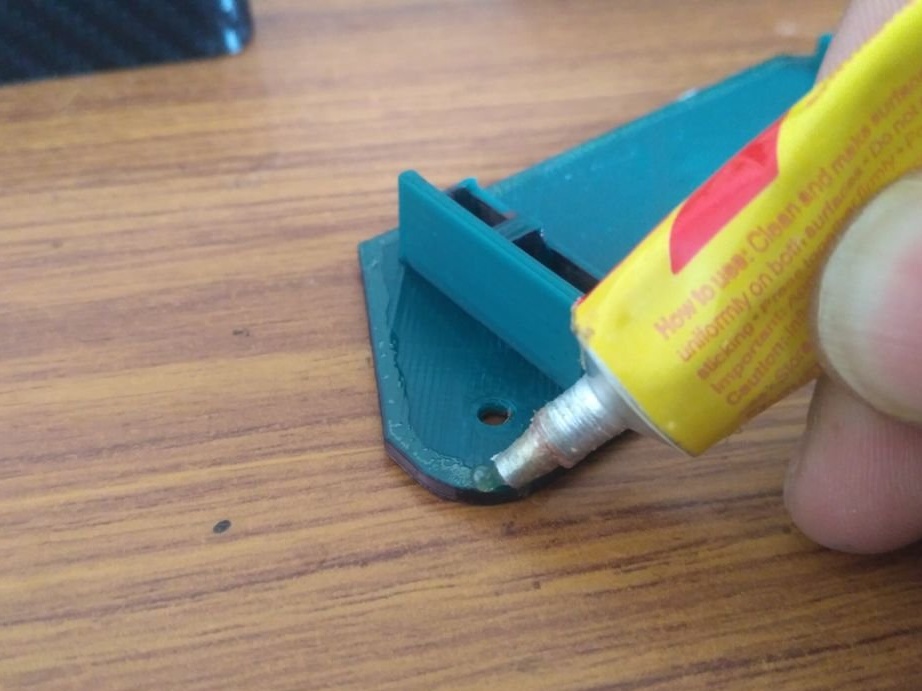
Lijmt de magneet aan het lichaam.

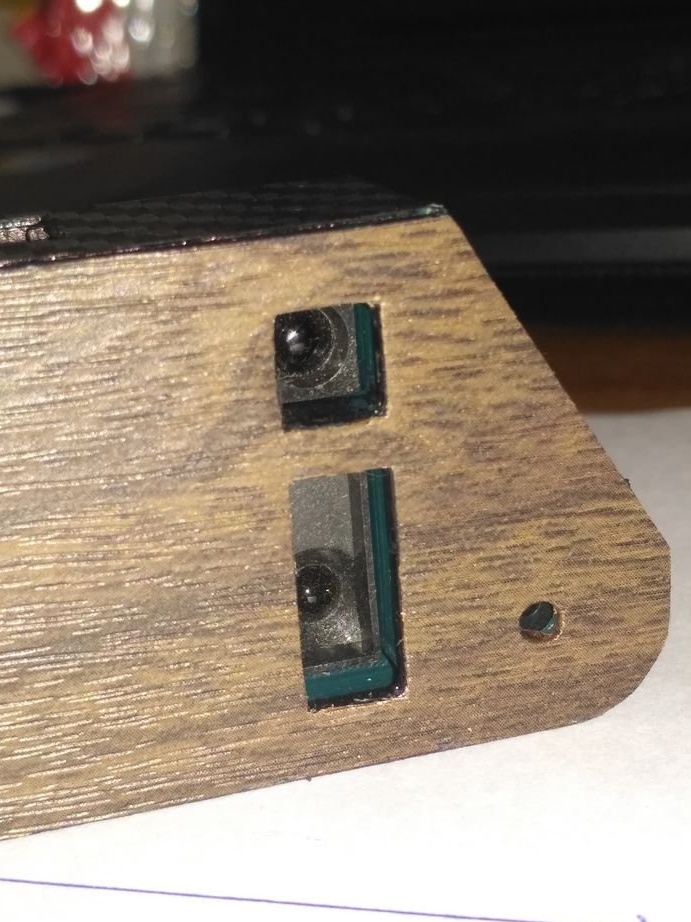
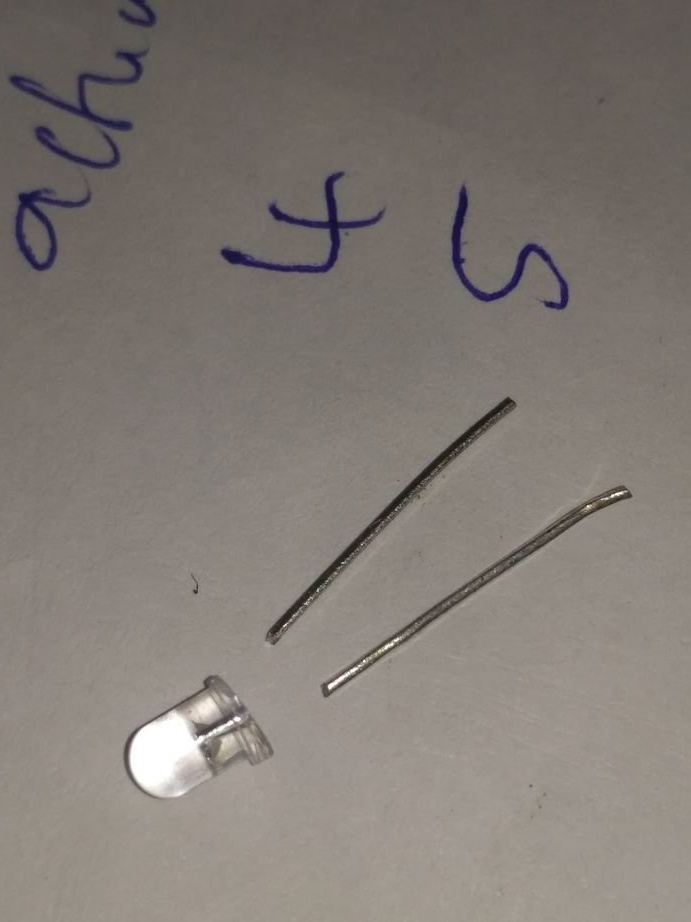
Stap vier: Sensoruitlijning
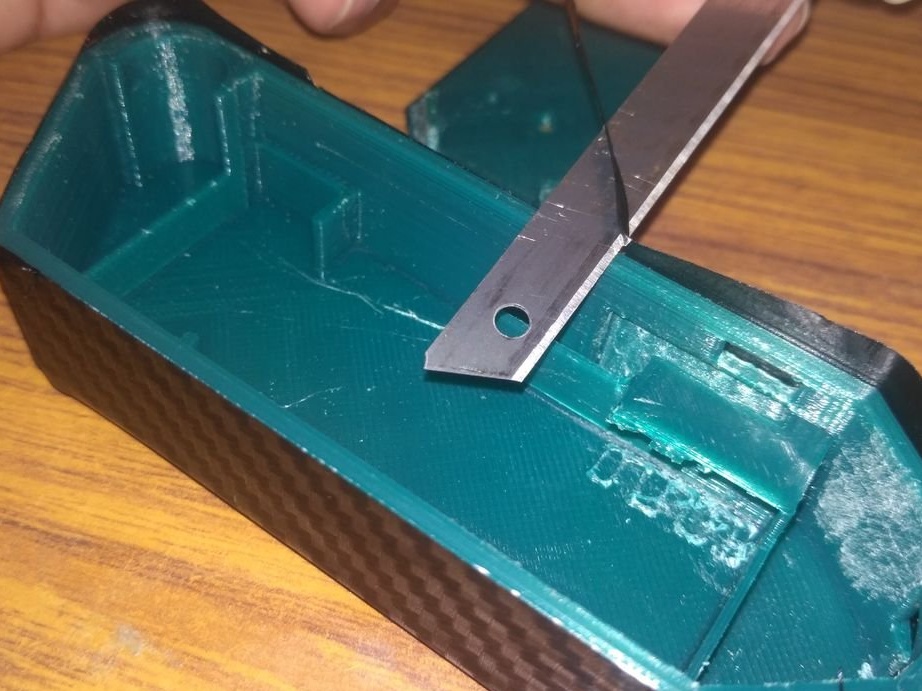
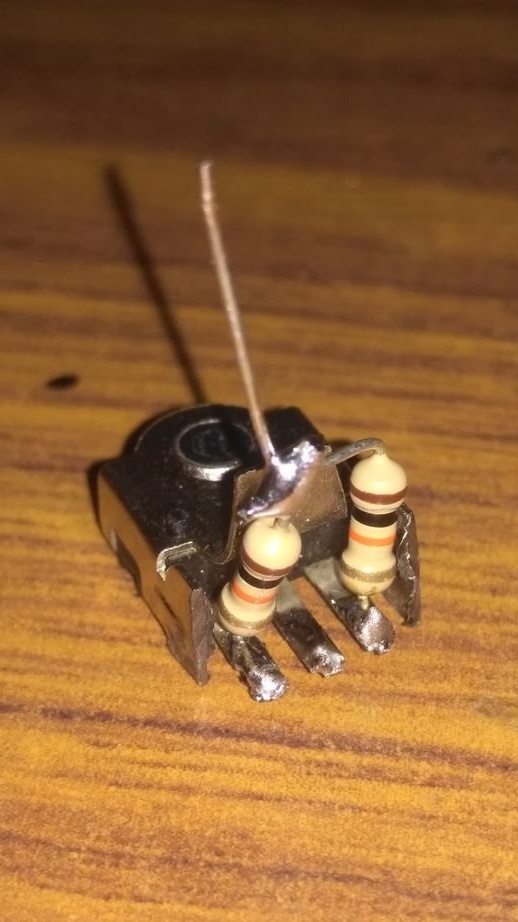
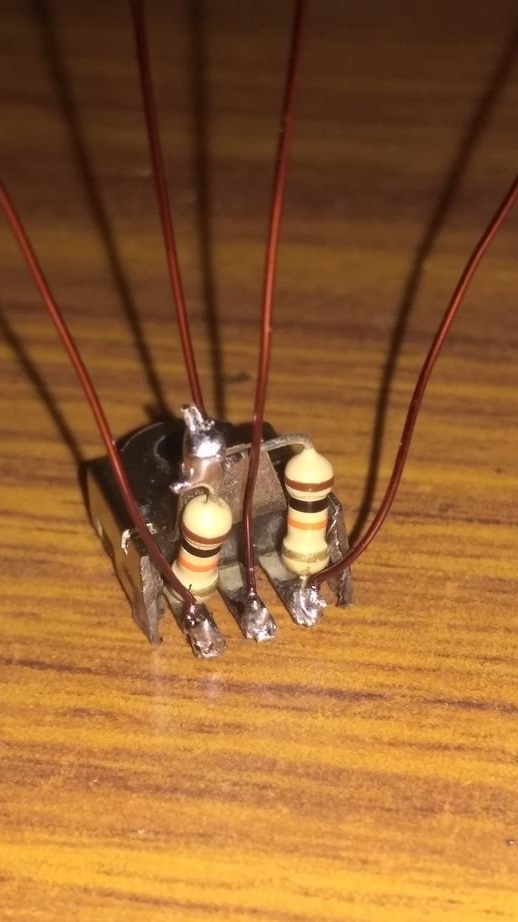
Om de grootte te verkleinen, zijn de IR-sensor en encoder afgesneden.






Stap vijf: weergeven
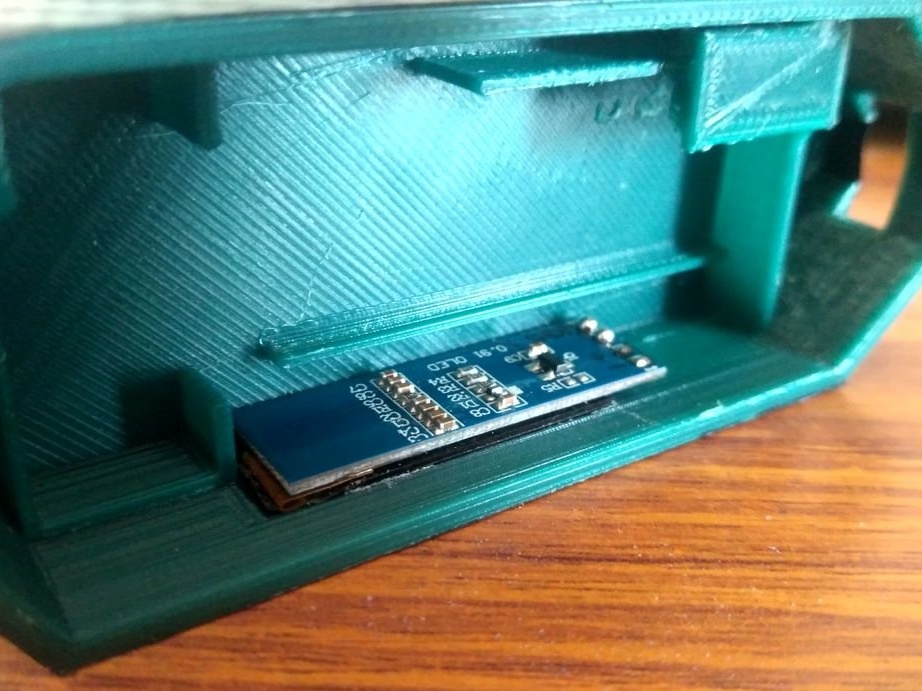
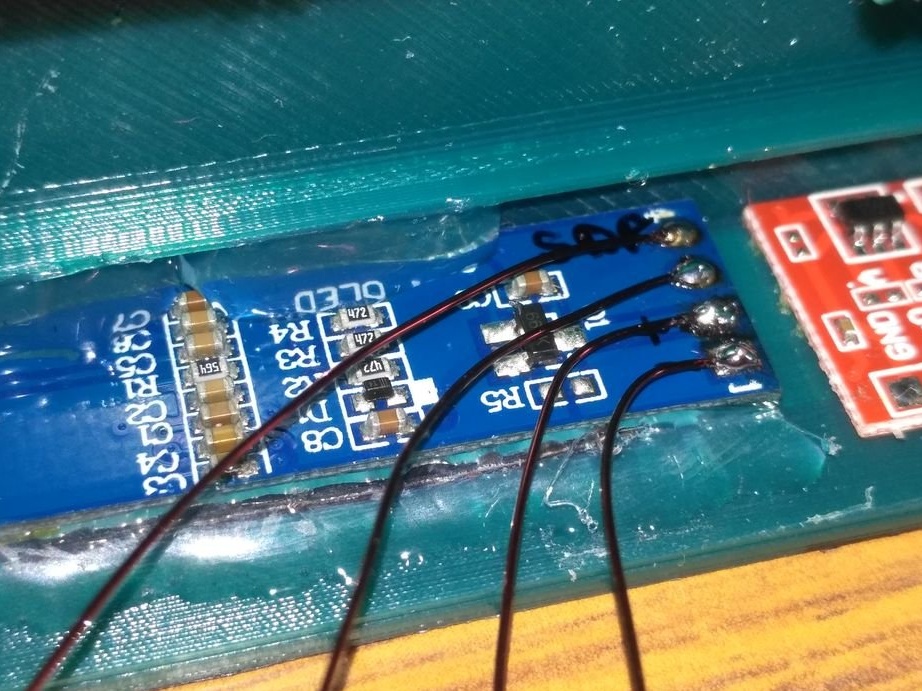
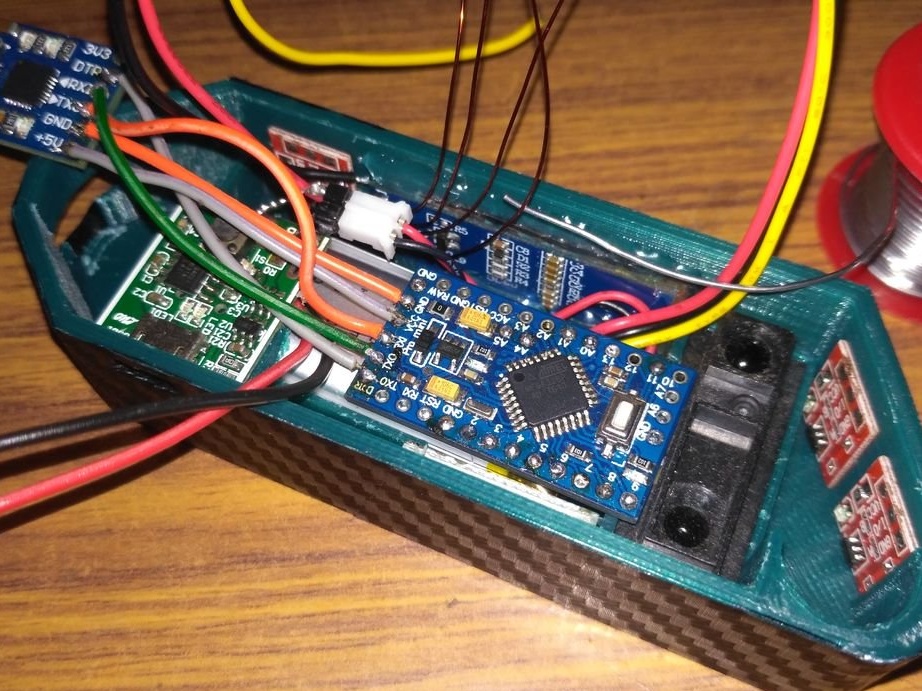
Markeert de namen van de contacten op de achterkant van het OLED-scherm, zodat u vervolgens de juiste verbindingen kunt maken. Zet het OLED-scherm in de juiste positie, zoals weergegeven in de tweede afbeelding. Bevestigt het scherm met hete lijm.

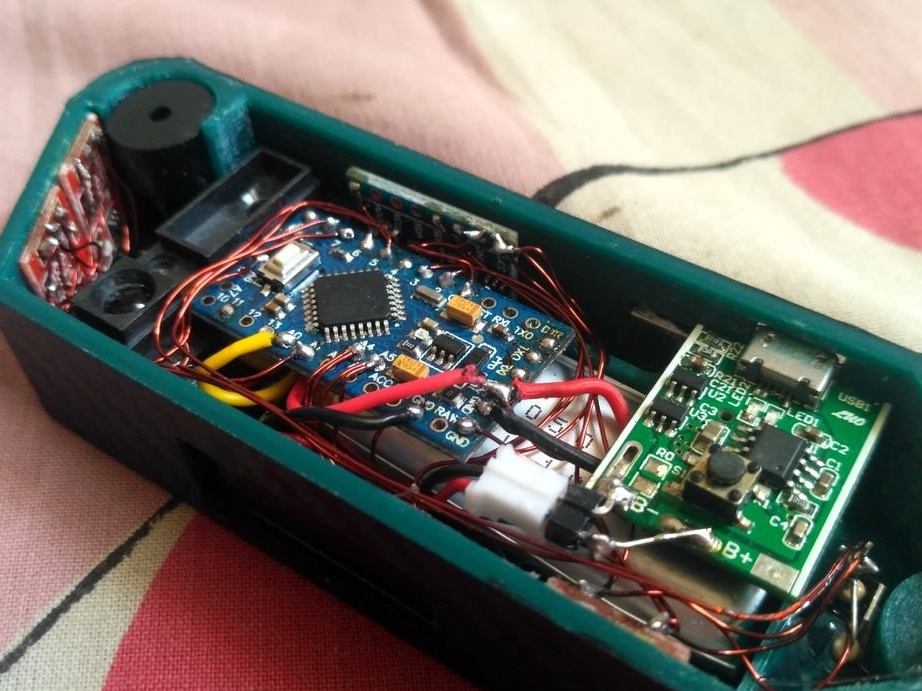
Stap zes: modules
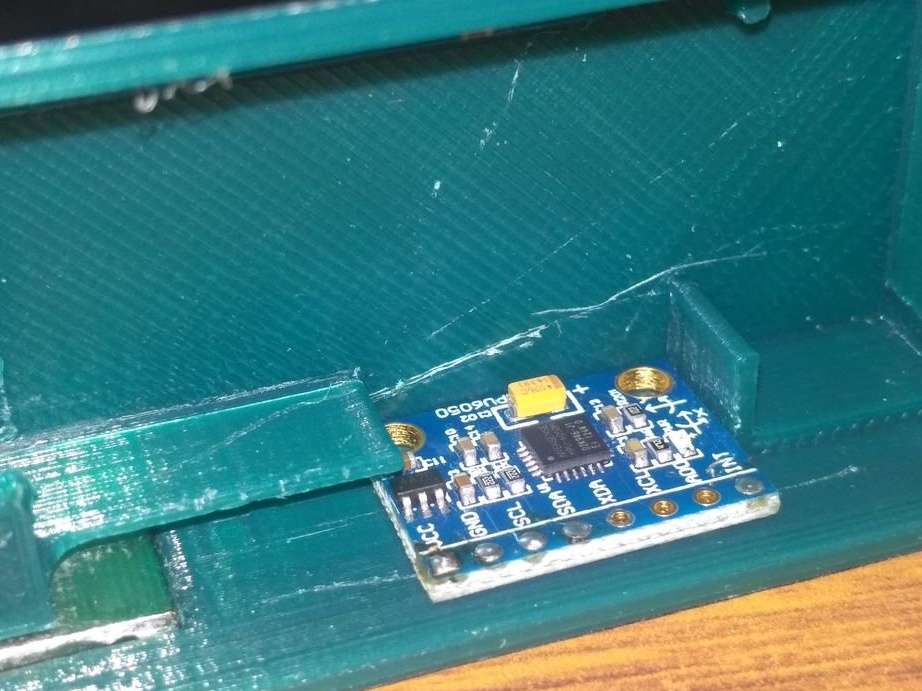
Lijmt de sensormodule en MPU6050.


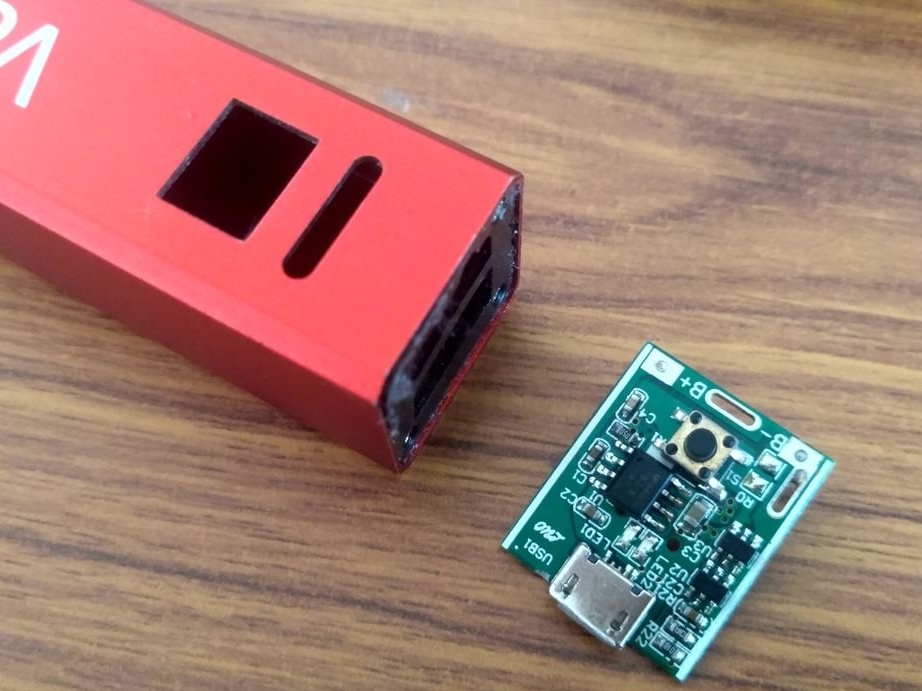
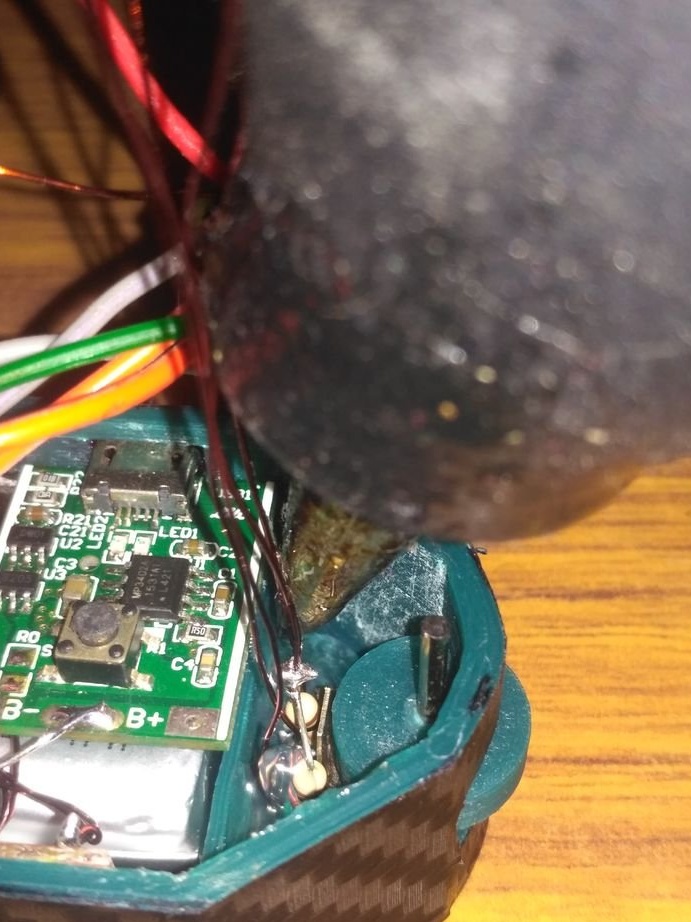
Zevende stap: oplaadmodule en batterij
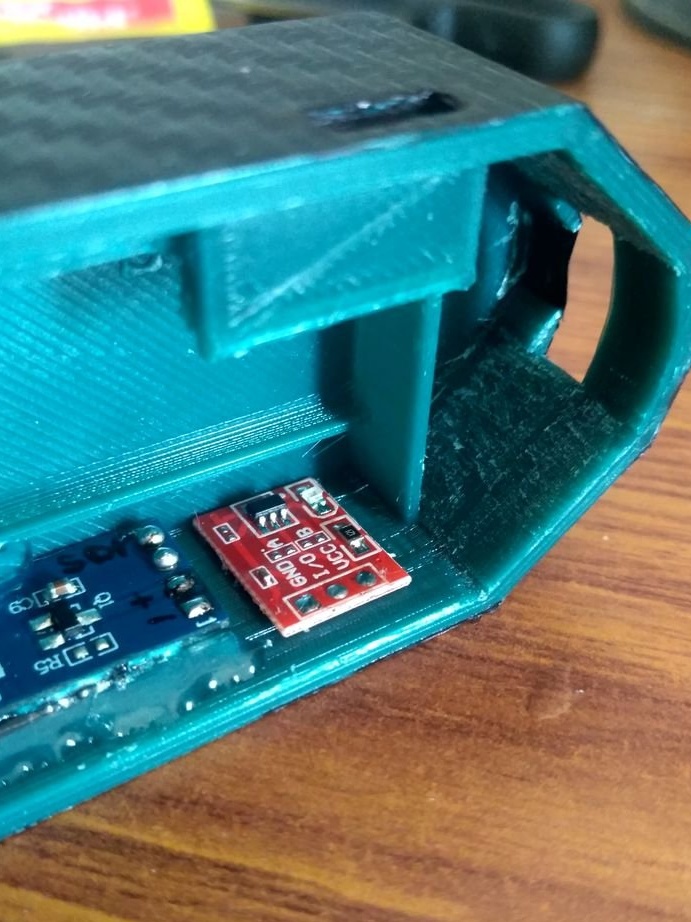
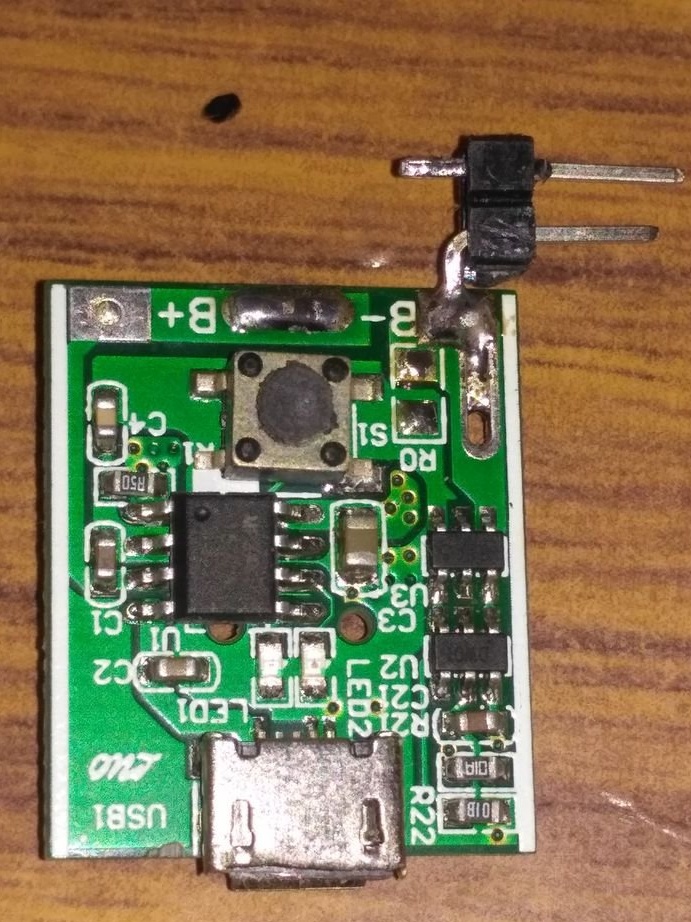
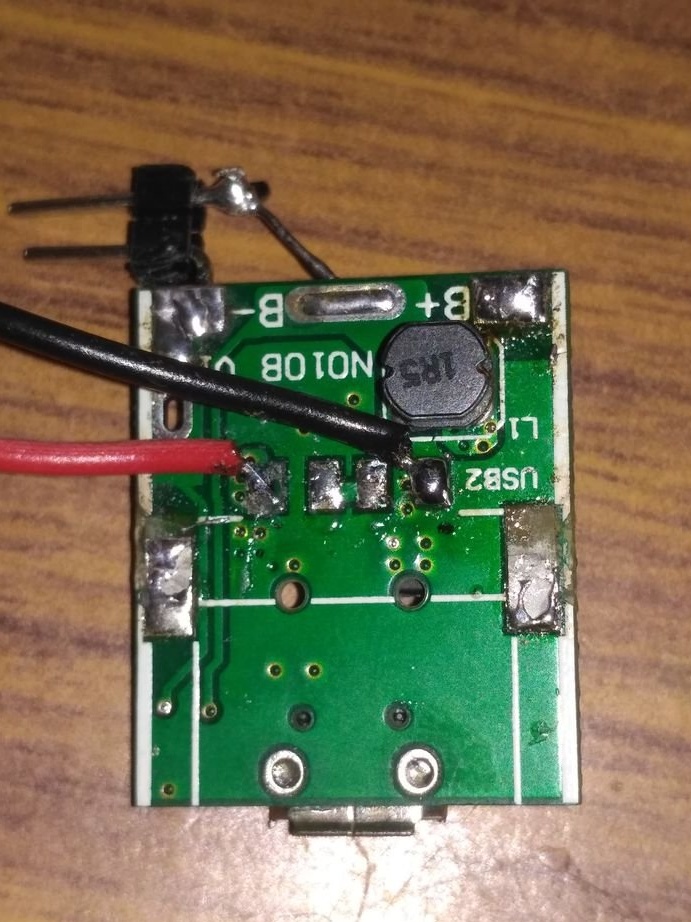
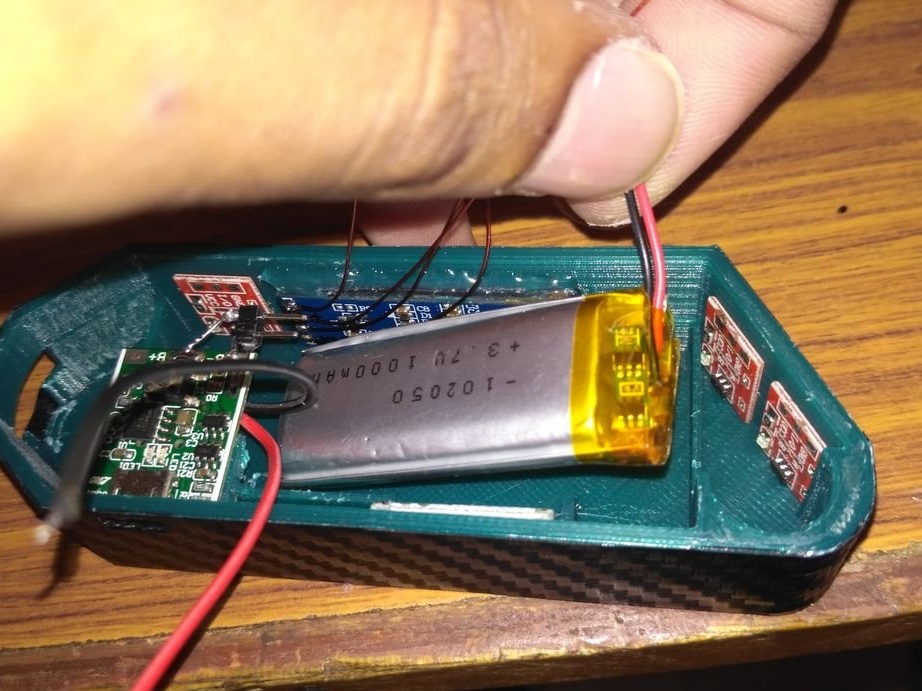
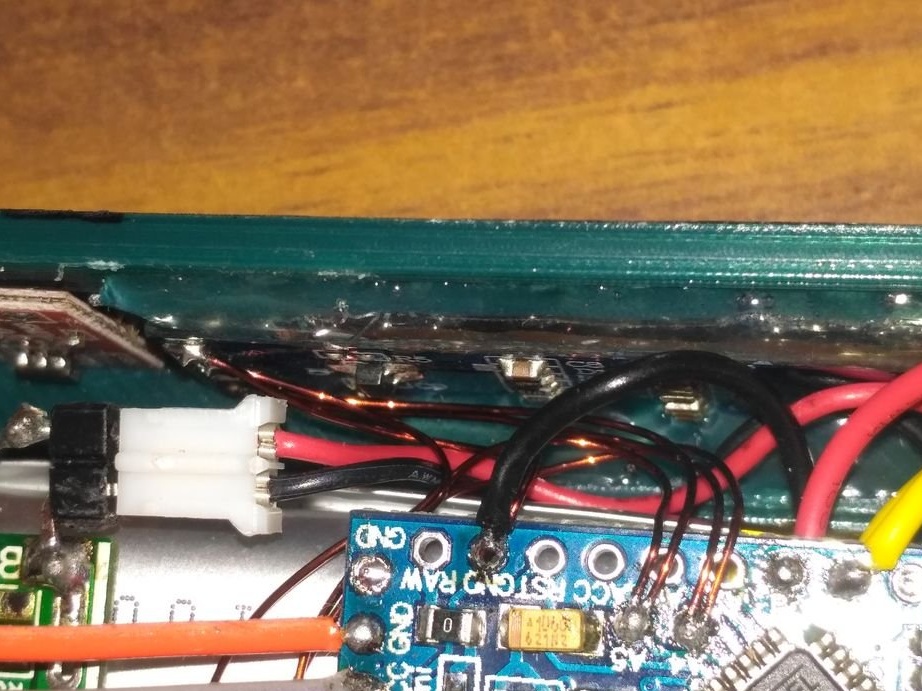
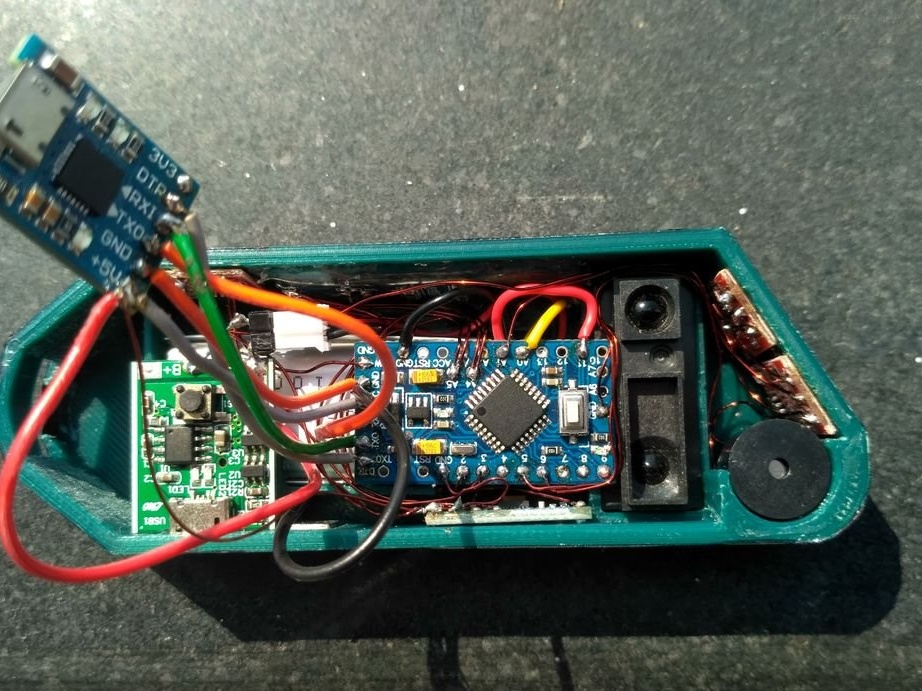
Deze module heeft zowel een batterijbeveiligingscircuit als een boost-omzetter 5 V, 1 A. Het heeft ook een aan / uit-knop die kan worden gebruikt als een aan / uit-schakelaar. De USB-poort op de module werd verwijderd met een soldeerbout en de twee draden werden gesoldeerd op de + 5 V-aansluitingen en geaard, zoals weergegeven in de 4e foto.
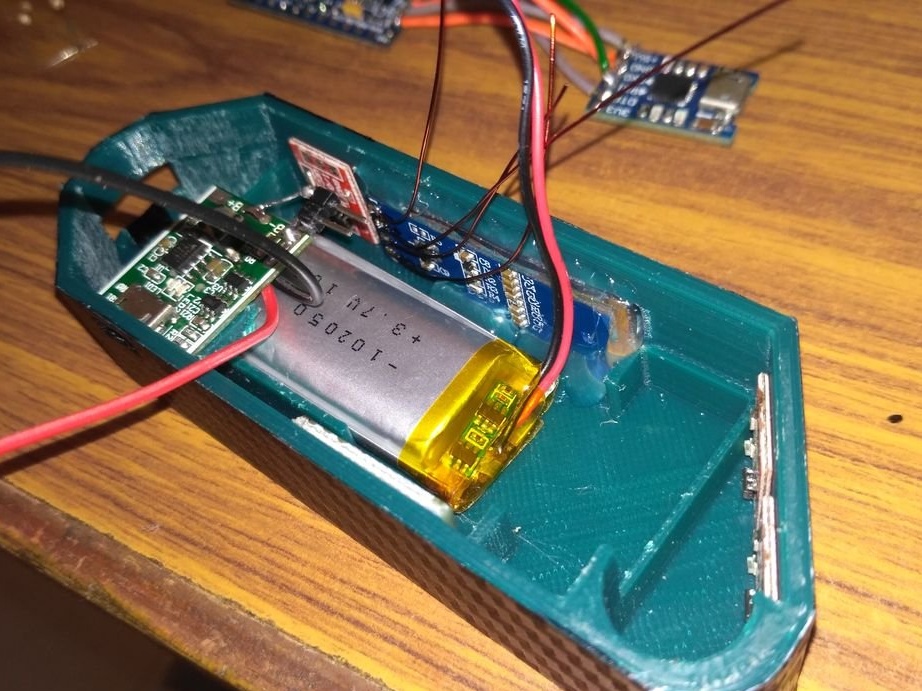
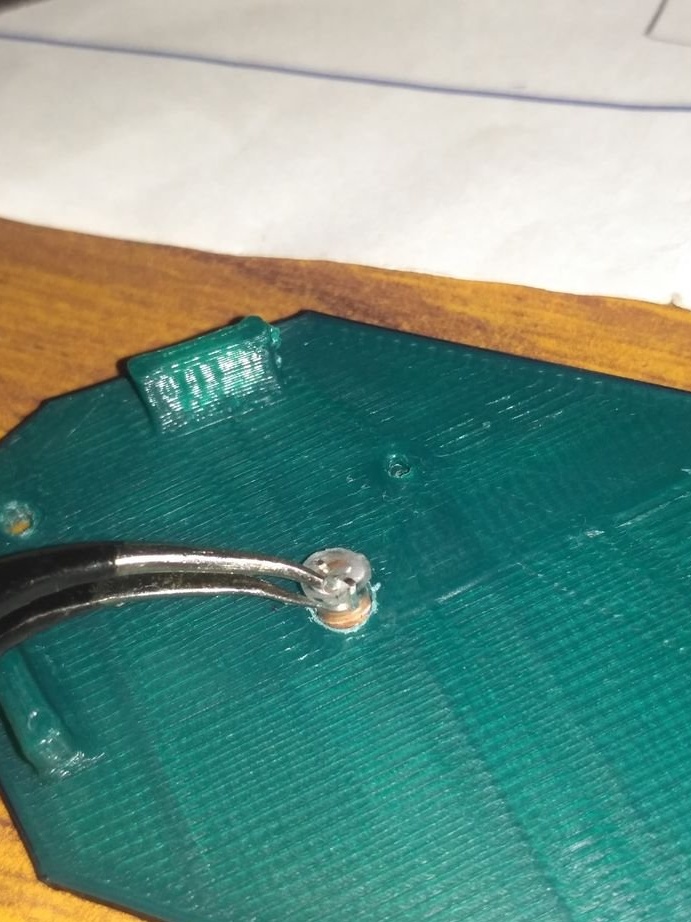
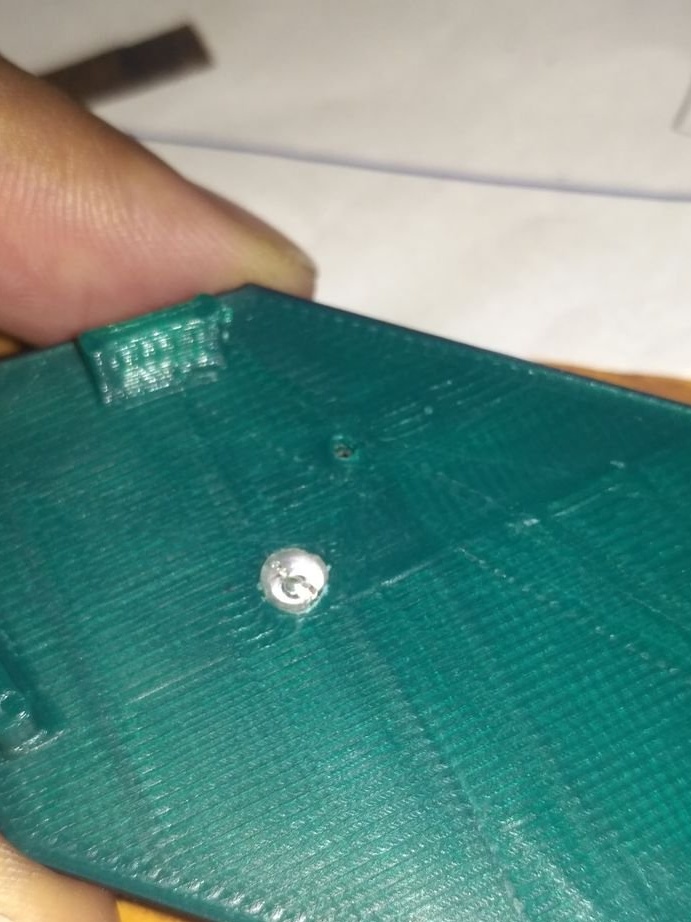
Vervolgens moet je de 2 connectoren aan B + en B- solderen, zoals getoond in de eerste twee foto's, en dan controleren of de module werkt met de batterij.
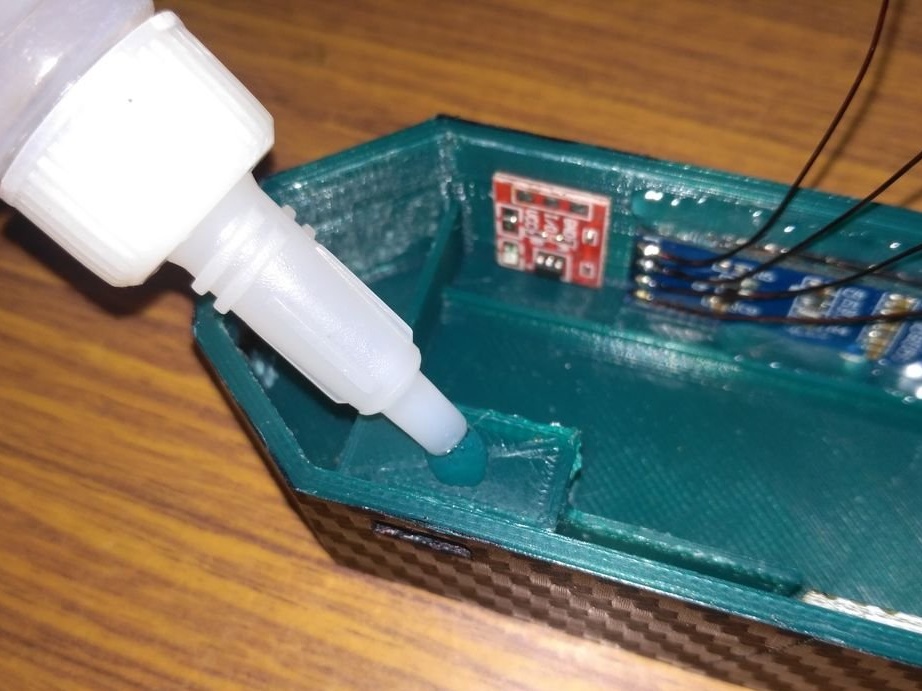
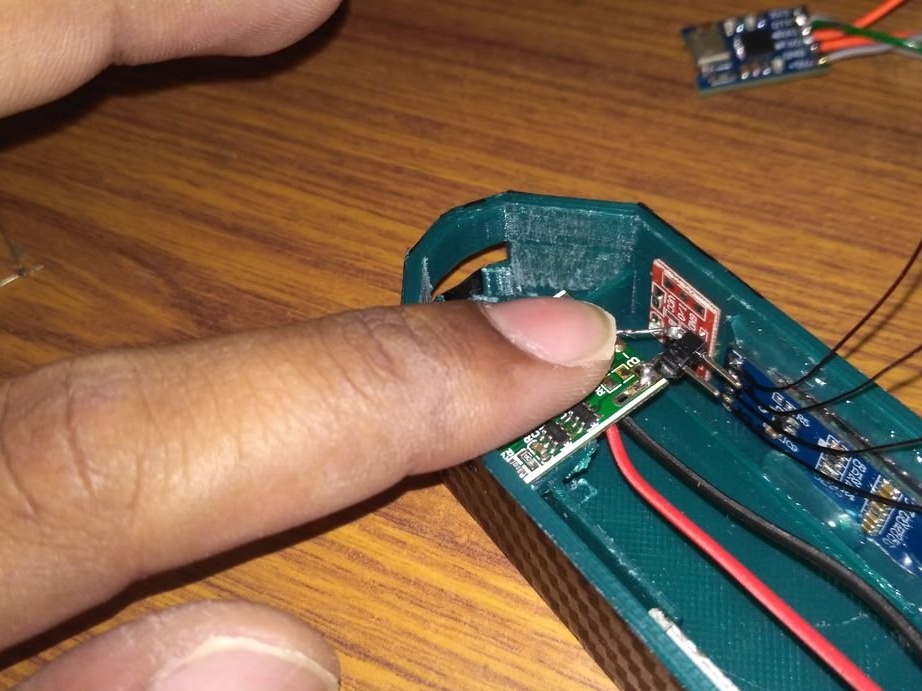
Nu moet u lijm aanbrengen op het platform dat voor de module is geleverd en de module voorzichtig plaatsen, waarbij u ervoor zorgt dat de oplaadpoort en het gat precies in de gaten zijn geïnstalleerd.

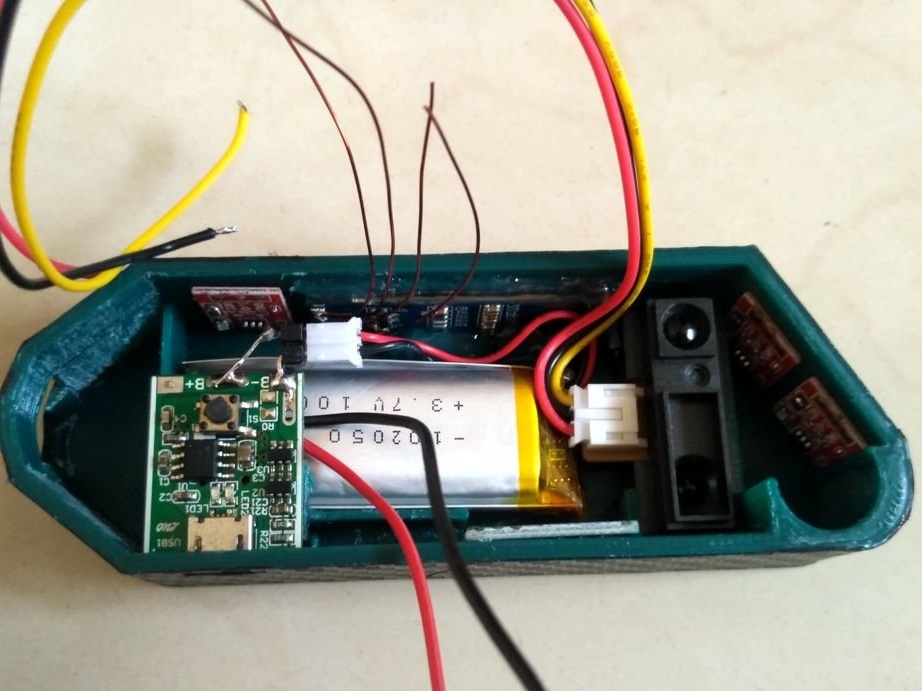
Stap acht: De batterij en IR-sensor installeren
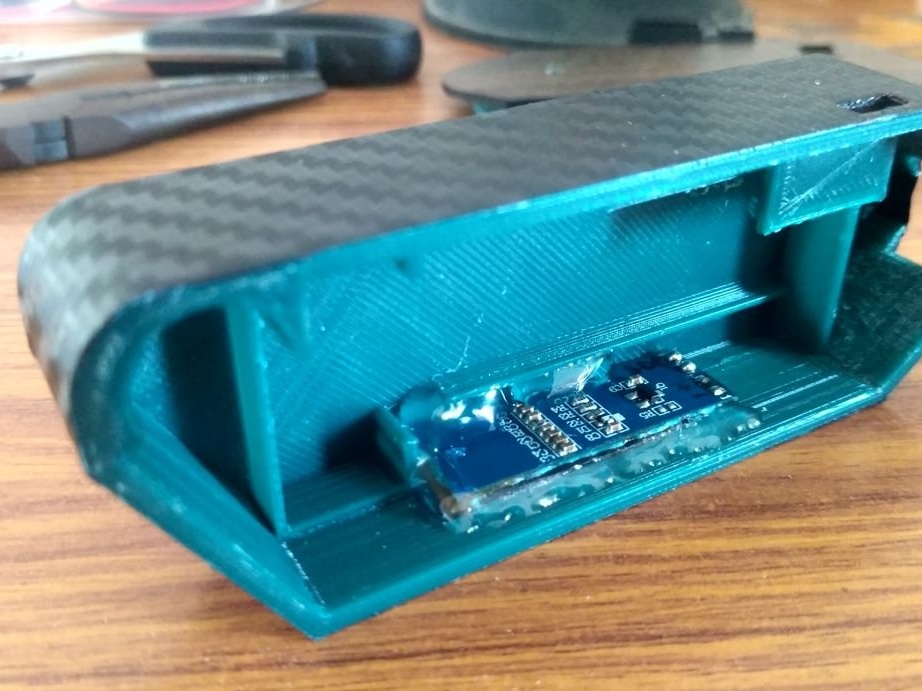
Soldeer draden aan de displaypennen. Installeert de batterij en IR-sensor.

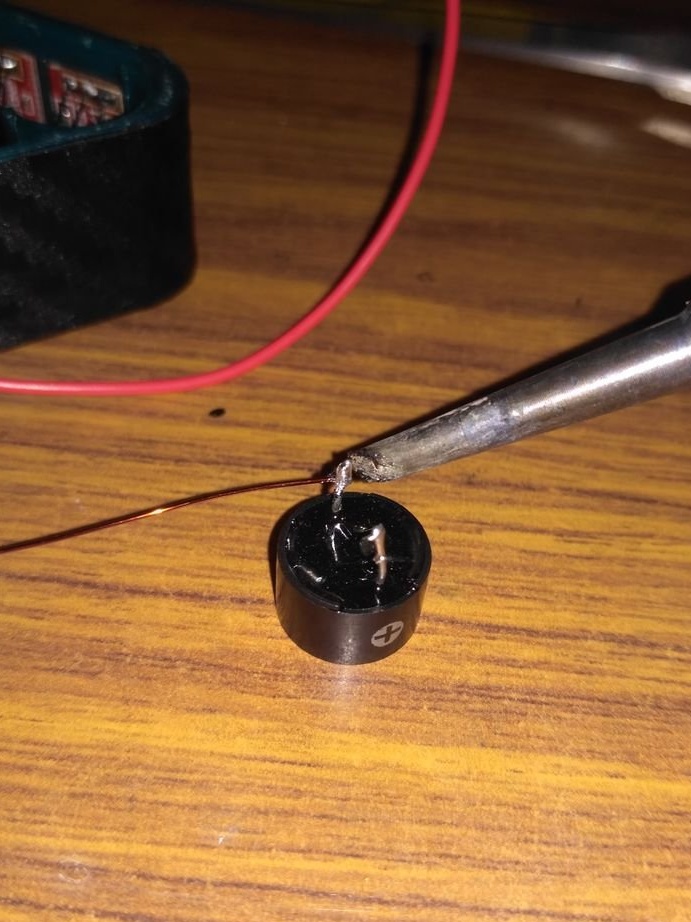
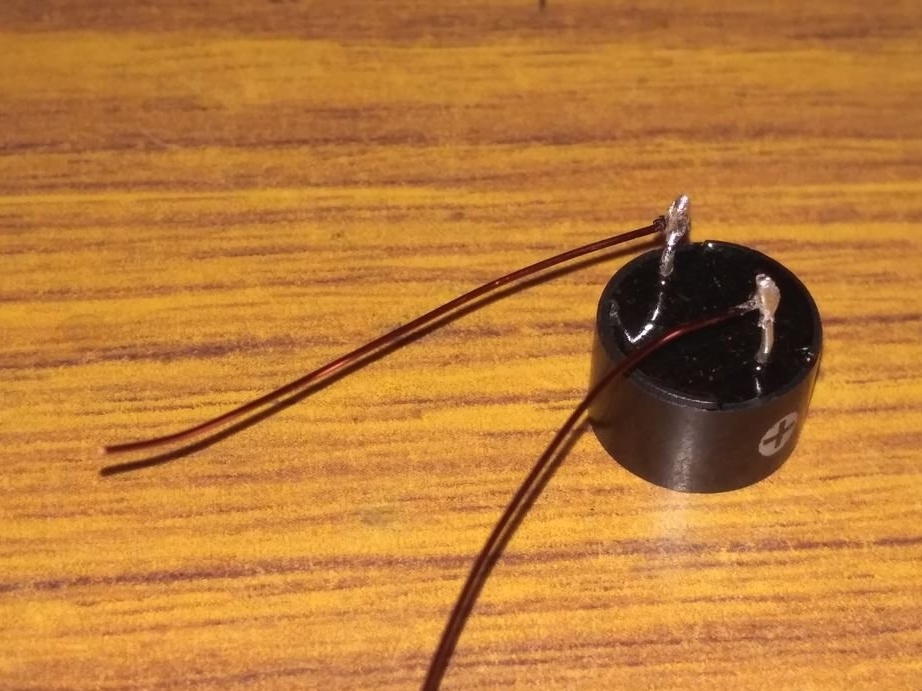
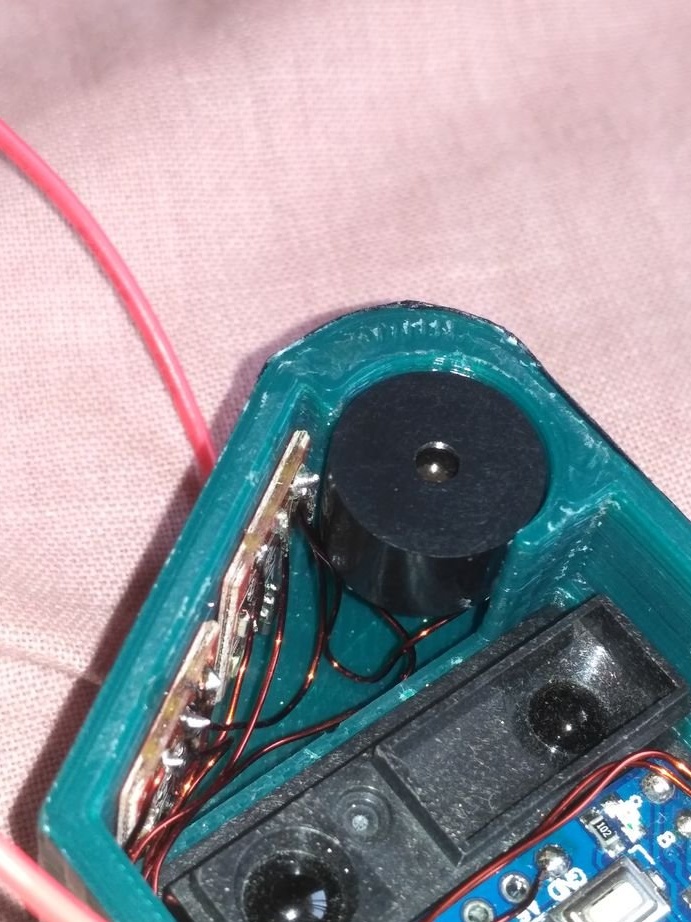
Stap negen: zoemer en oplaadmodule
Volgens het schema monteert het de oplaadmodule en de zoemer.

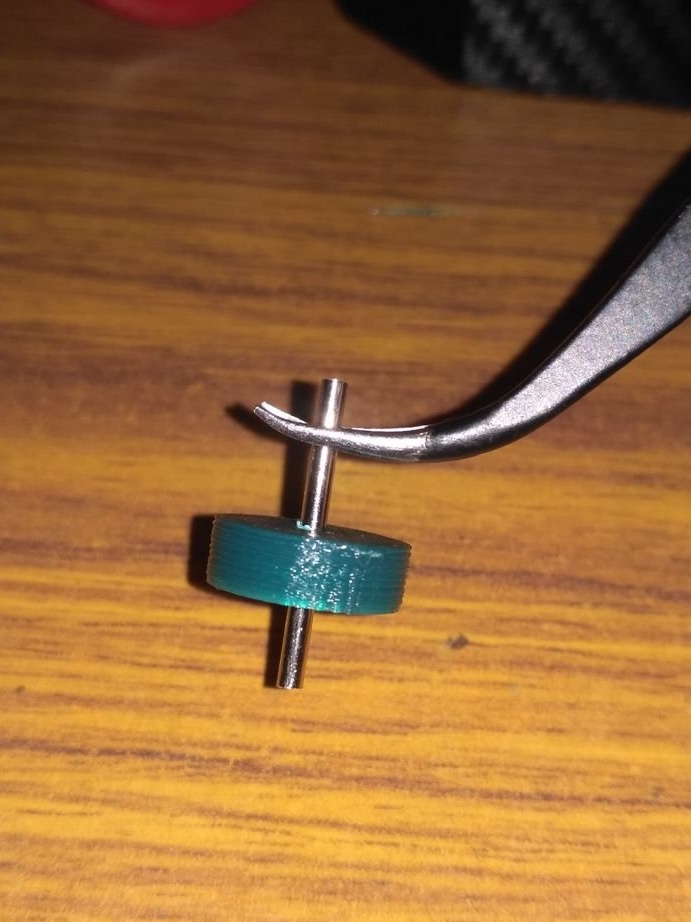
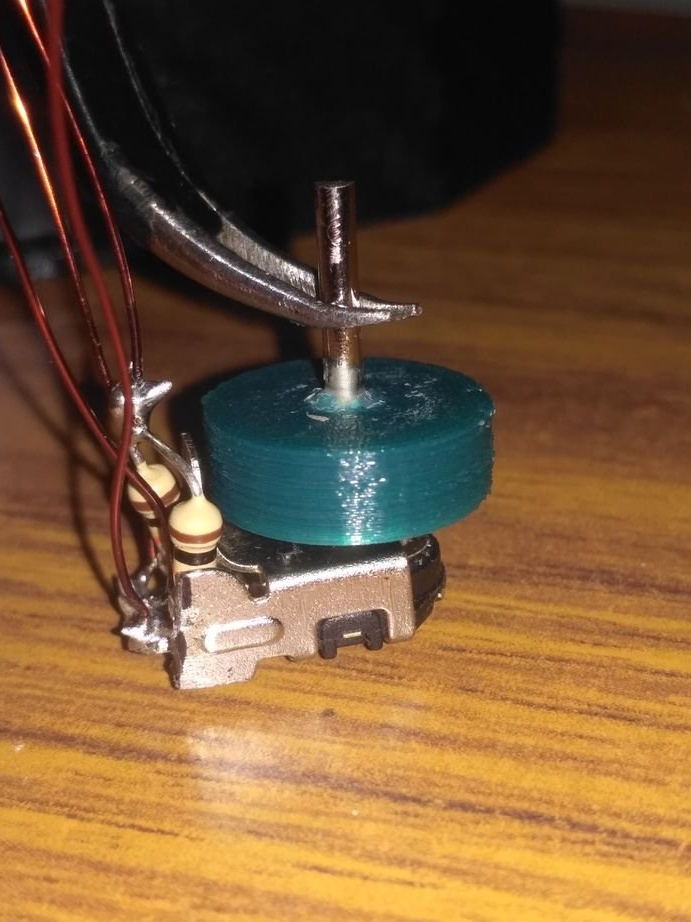
Stap tien: Encoder
Volgens het schema wordt de encoder gemonteerd. Voegt de stalen as in de encoder en het wiel in. Het gebruikt superlijm om de as en het wiel te bevestigen. Installeert een encoder met een wiel in de behuizing.




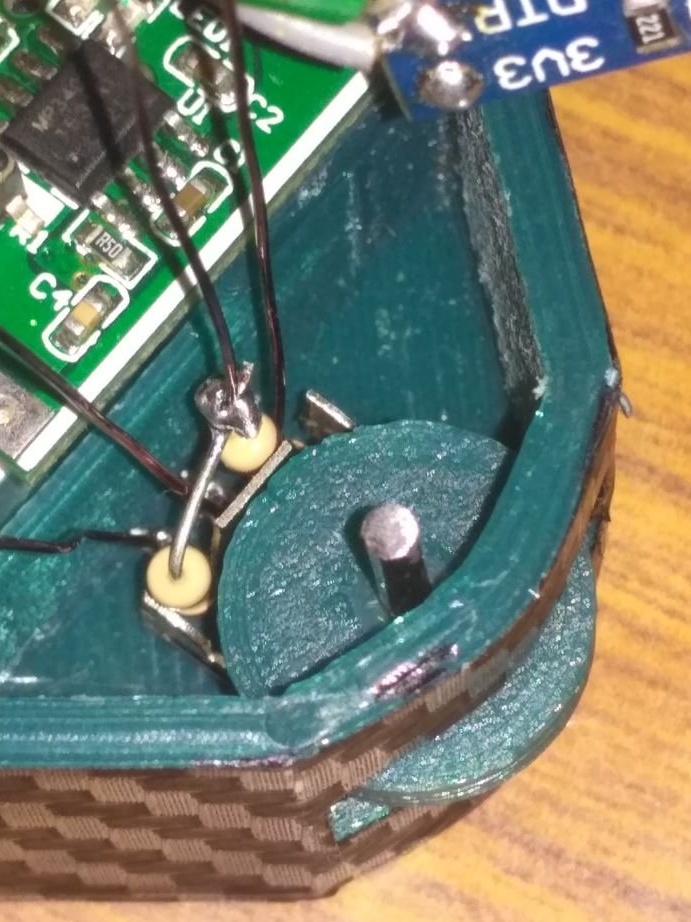
Stap elf: installatie
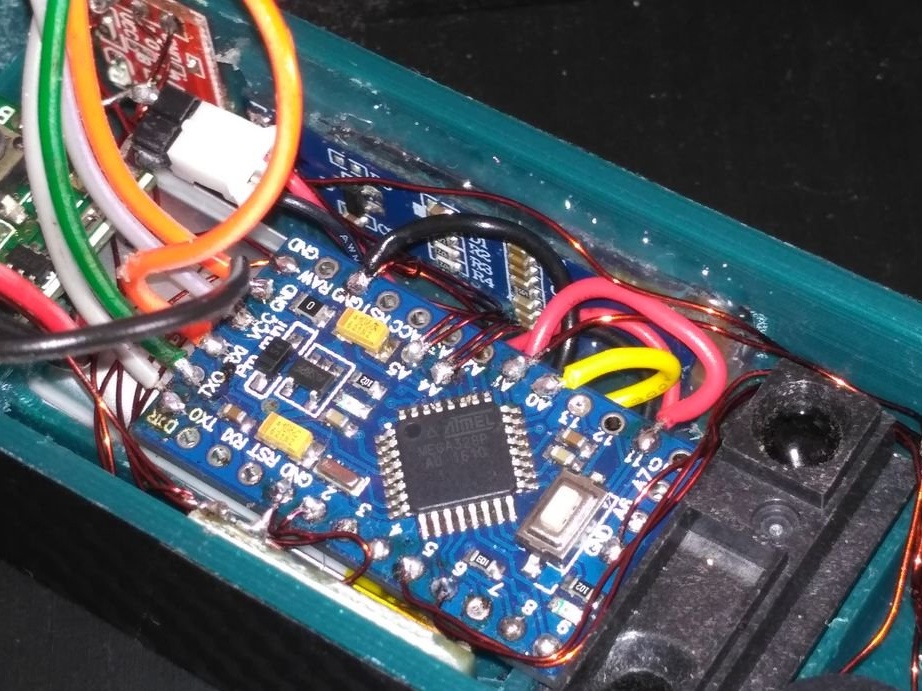
Bevestigt sensormodules. Volgens het circuit worden de draden gemonteerd. Tijdens de installatie moet ervoor worden gezorgd dat de draden niet onder het wiel vallen en de IR-sensor niet bedekken.


Stap twaalf: Code downloaden
Laadt code en bibliotheken.
final_code.ino
Adafruit_SSD1306-master.zip
Adafruit-GFX-Library-master.zip
SharpIR-master.zip

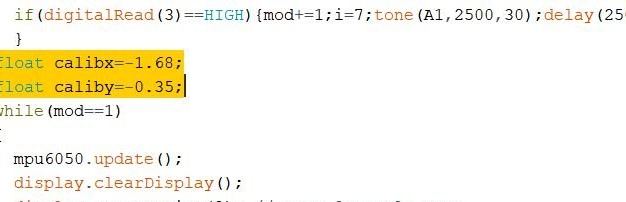
Stap dertien: kalibratie
Eerst wordt de gyroscoop gekalibreerd. Omdat de MPU6050 accelerometer / gyroscoopmodule eenvoudig op het lichaam is vastgelijmd, is deze mogelijk niet helemaal plat. Om deze fout te corrigeren, worden de volgende stappen uitgevoerd.
1. Sluit het apparaat aan op de computer en plaats het op een vlak oppervlak.
2. Schakel naar de LEVEL-modus op het apparaat door de "M" -knop aan te raken en noteer de X- en Y-waarden.
3: Wijs deze waarden toe aan de variabelen "calibx" en "caliby" in de code.
4: Download het programma opnieuw.



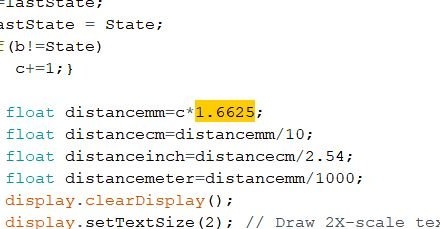
Berekent nu afstanden per wielomwenteling.
Het aantal stappen per omwenteling van de encoderas, N = 24 stappen
Wieldiameter, D = 12,7 mm
Wielomtrek, C = 2 * pi * (D / 2) = 2 * 3.14 * 6.35 = 39.898 mm
Daarom is de afgelegde afstand per stap = C / N = 39.898 / 24 = 1.6625 mm.
Stap veertien: testen
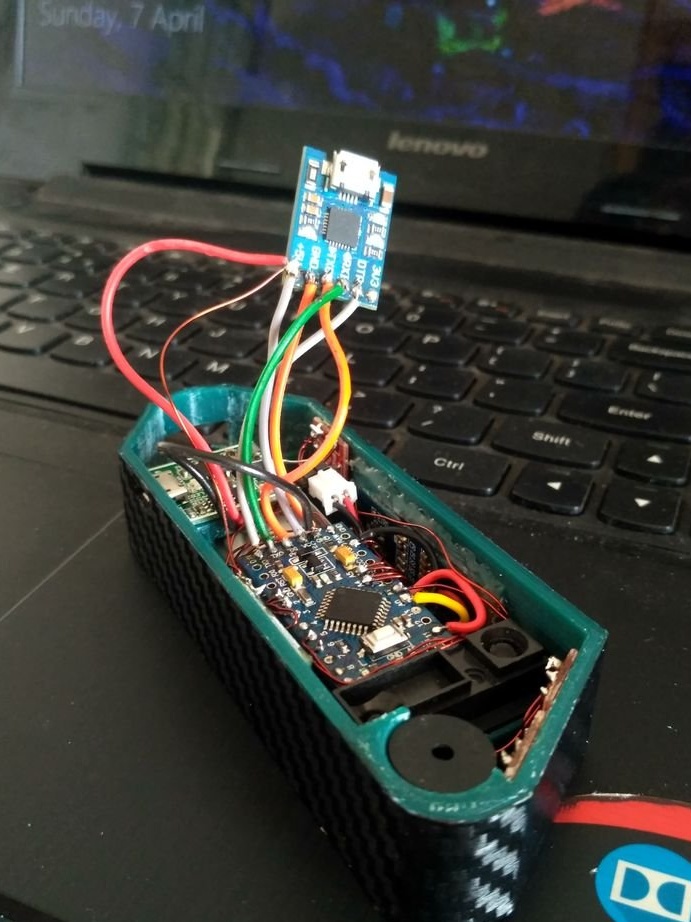
Voordat het behuizingsdeksel wordt geïnstalleerd, worden sensoren, oplaadmodule, knoppen en display getest.



Stap vijftien: knop- en kastmontage
De aan / uit-knop op het laadbord is kort en de meester, die de benen snijdt, stelt een extra LED in, die op de knop drukt.



Lijmt twee helften van het lichaam.





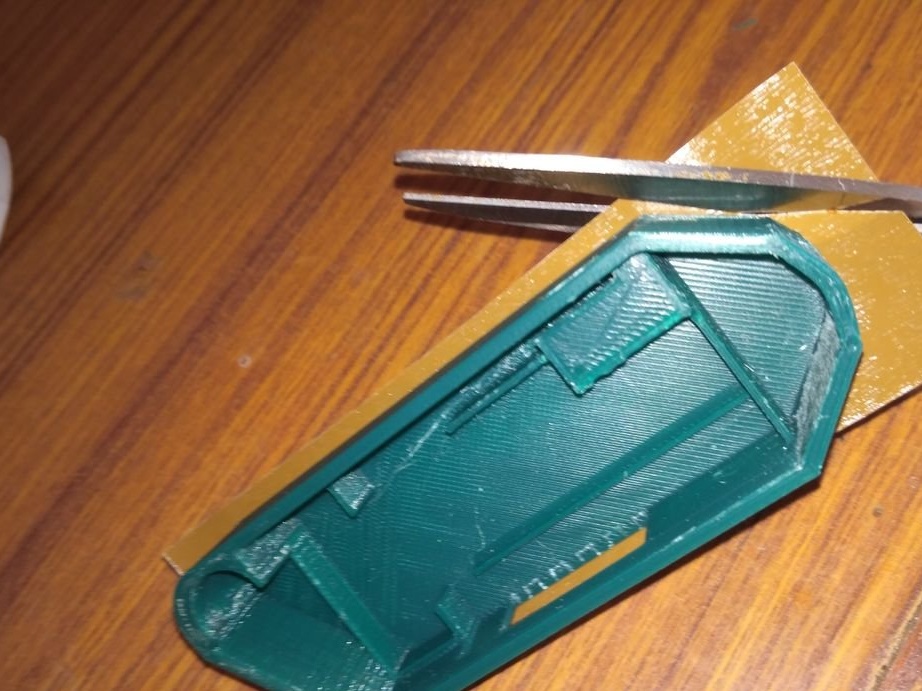
Stap zestien: de knoppen markeren
De letters zijn op een lasersnijder gesneden en vervolgens op het lichaam gelijmd.




Alles is klaar, het blijft alleen om het apparaat in werking te testen.