
Vandaag gaan we een echt spel maken met een bal en een doolhof. De auteur van dit zelfgemaakte product is AlexGyver.

Velen van jullie kennen waarschijnlijk games in deze stijl. We hebben een bal in het doolhof, we moeten de bal naar de uitgang van het doolhof brengen. Gaten maken het moeilijk voor de bal om door te vallen en je moet helemaal opnieuw beginnen. Dergelijke games verschenen op de eerste smartphones met een normaal kleurenscherm en ingebouwde accelerometer en waren destijds erg populair.

Dus waarom zou u zoiets niet in het echte leven doen, dat wil zeggen, materieel en misschien zelfs op afstand bedienen. Laten we het proberen.
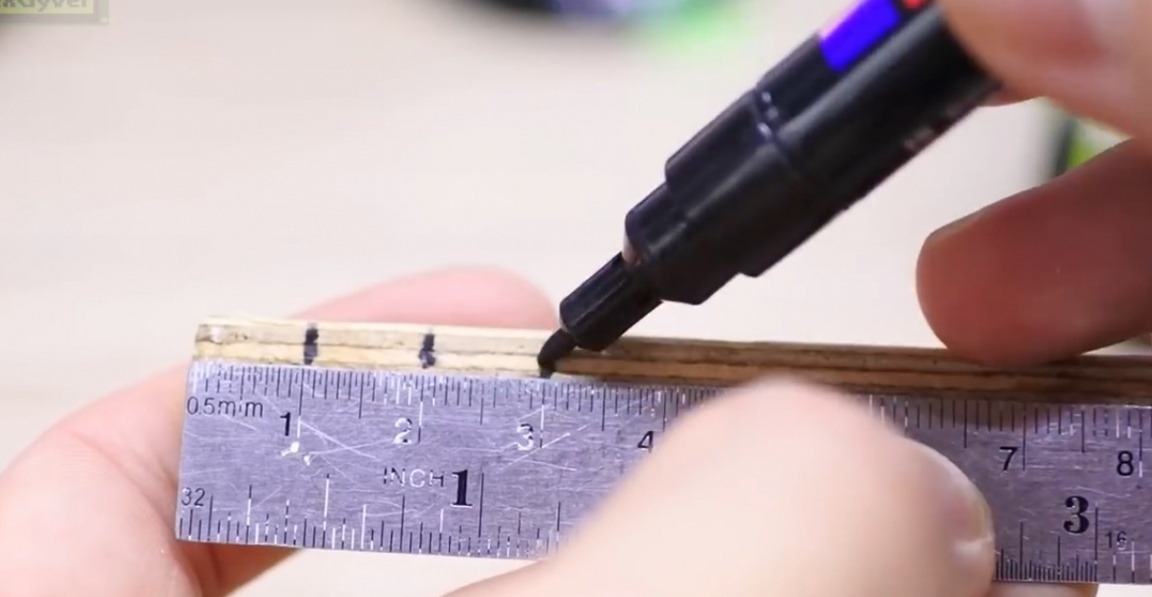
Het labyrintplatform wordt op 2 scharnieren gemonteerd om strikt langs 2 assen te kantelen. In eerste instantie wilde de auteur een sferisch scharnier maken, maar dit brengt een heleboel andere problemen met zich mee. Laten we eerst een miniversie maken om het programma te debuggen. Neem hiervoor een vierkant stuk triplex - het wordt een tafel.

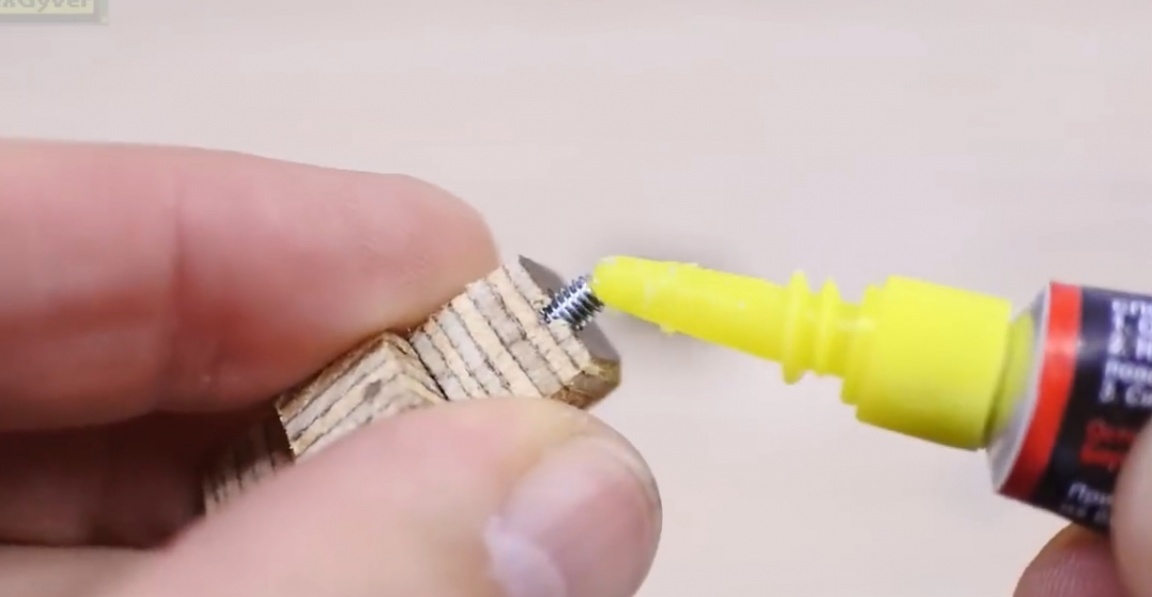
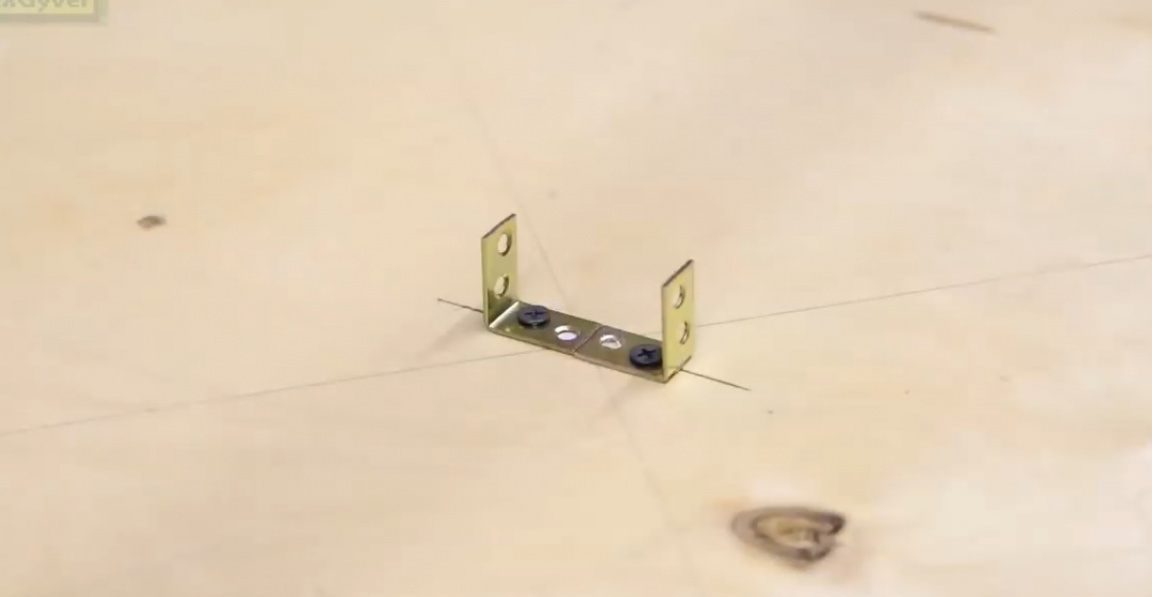
De wanden van het doolhof kunnen van karton zijn, lijm het op hete lijm. Om een scharnier te maken, heb je een paar schroeven nodig en iets waarin je ze kunt bevestigen. De auteur gebruikte voor dit stukje dikker multiplex.

De bal is zo, staal 15 mm.

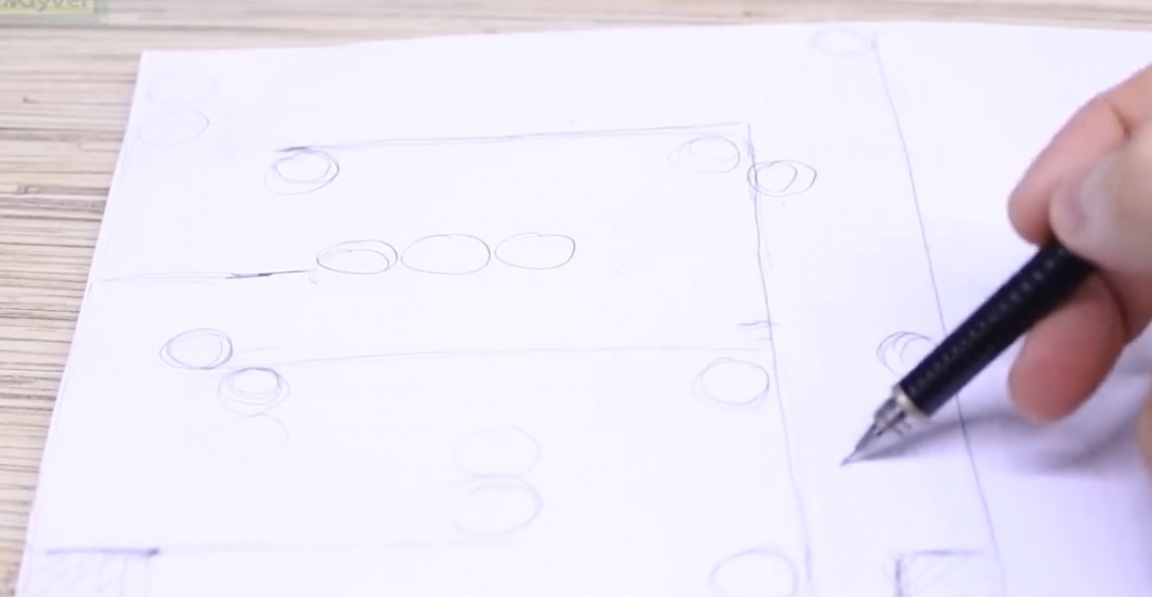
Vervolgens moet je het doolhof zelf tekenen.
Dan bouwen het doolhof. Ik moest het een beetje veranderen.


We beginnen te boren. Daarna gaan we verder met een Chinese trapboor.



Vervolgens voltooien we het labyrint.

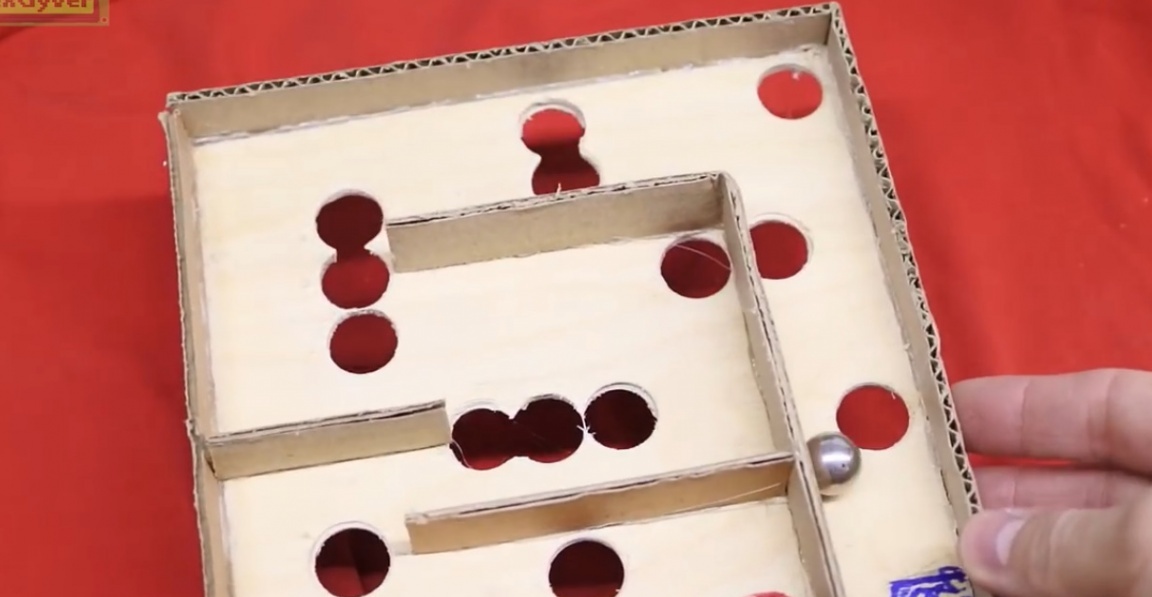
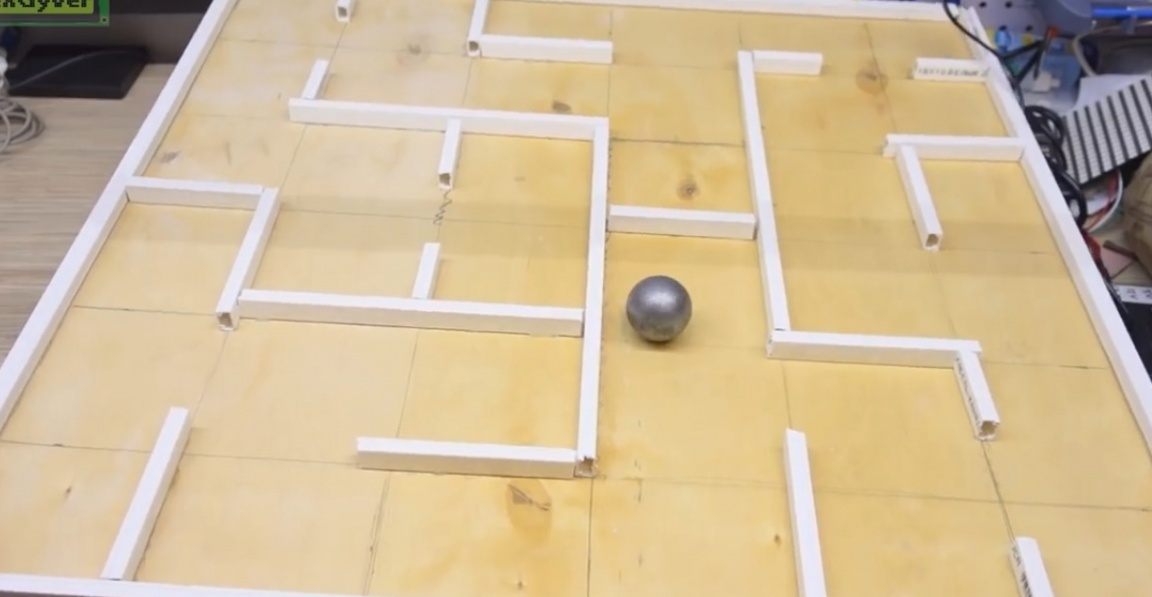
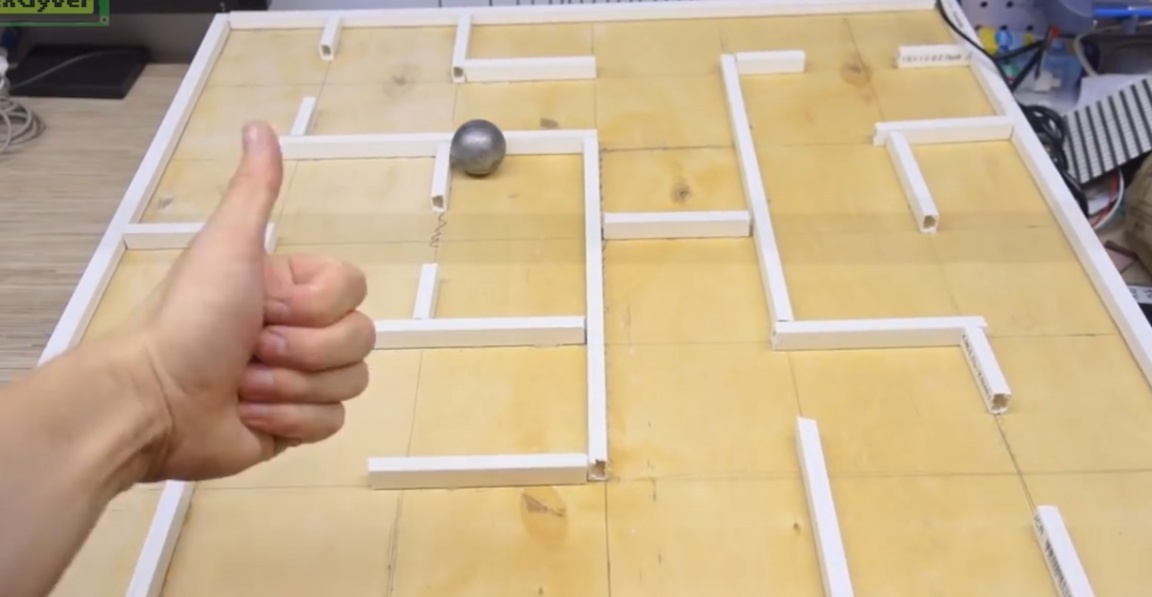
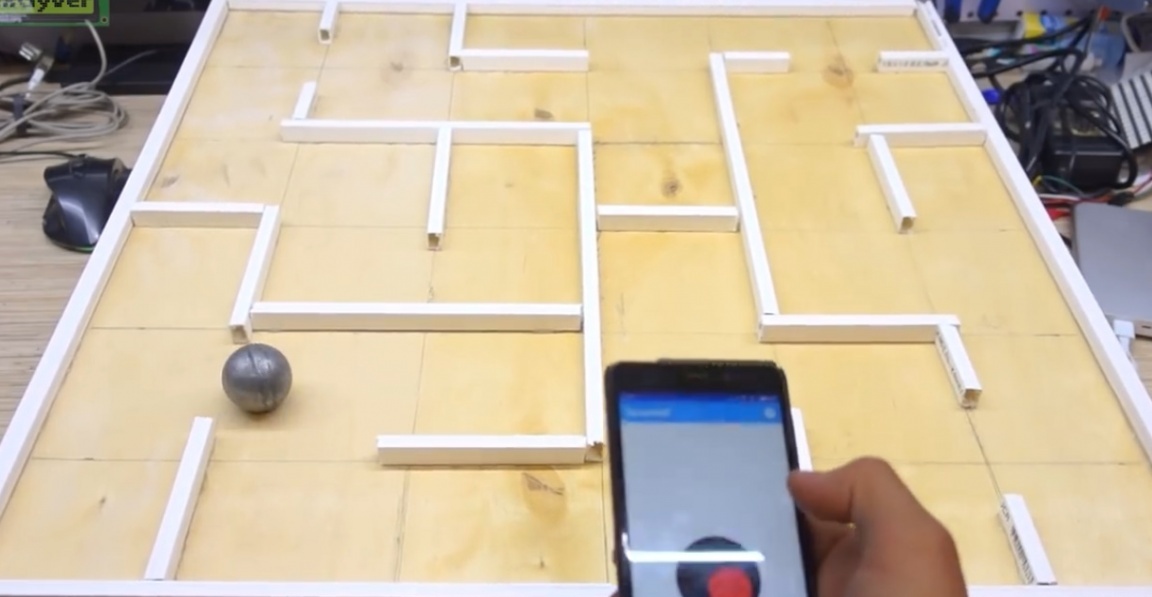
Hier is zo'n labyrint met een bal in materiële uitvoering.
Laten we proberen ons resulterende doolhof te doorlopen, om zo te zeggen in handmatige modus. Zo eenvoudig is het niet.
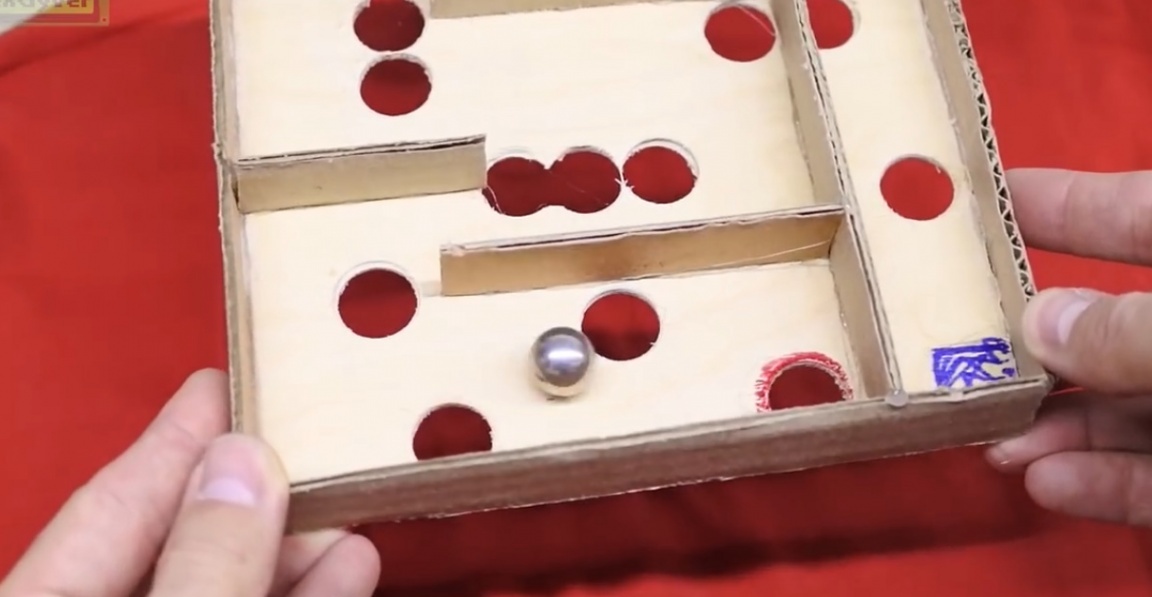
De auteur heeft opzettelijk gaten gemaakt die vallen zijn. Ze staan direct in het pad van de bal. Hij heeft ook van tevoren bewust een complexe kaart gemaakt om het jarenlang interessant te maken om te spelen. Nou, het lijkt in orde te zijn.
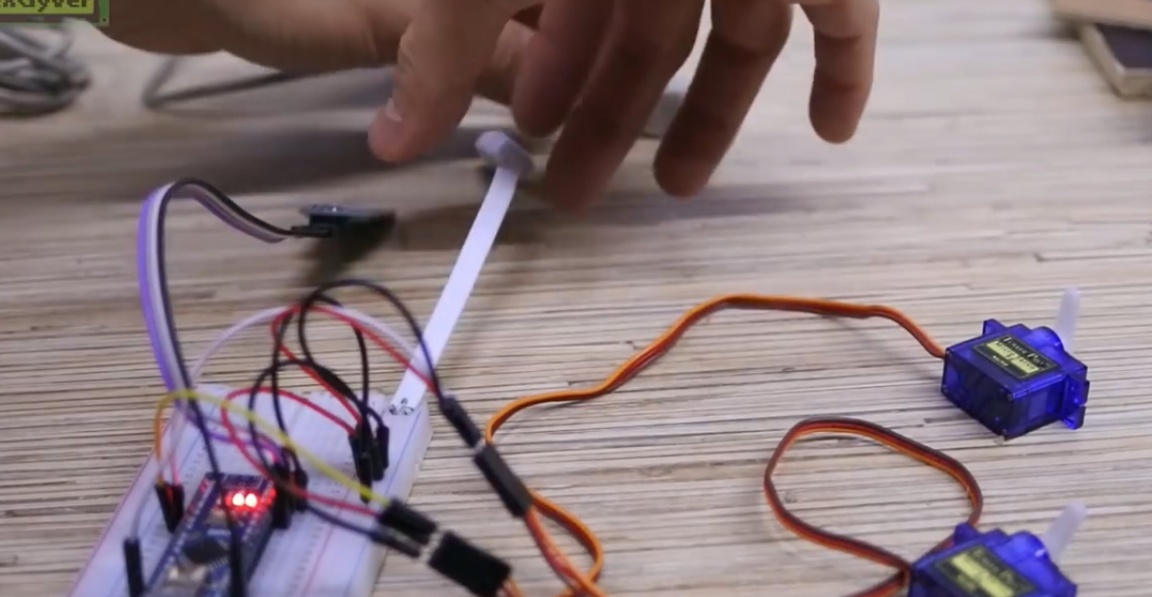
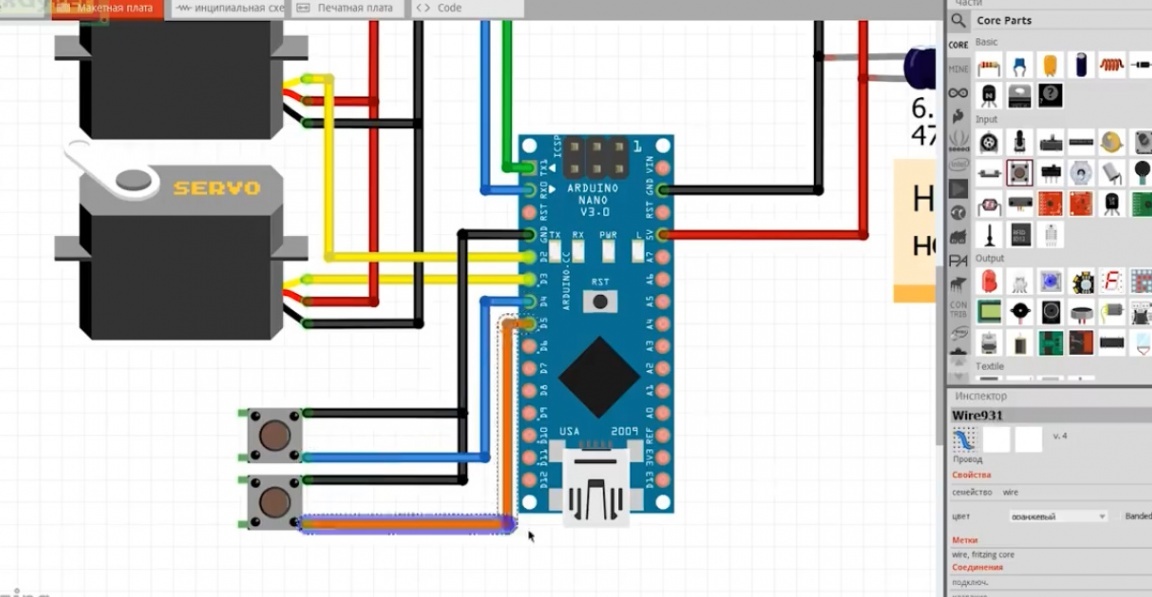
En nu is het tijd om te verzamelen elektronica. De tafel wordt verplaatst met 2 servo's, ze worden bestuurd door het platform Arduino en vanaf een smartphone via bluetooth. Het schema is heel eenvoudig:
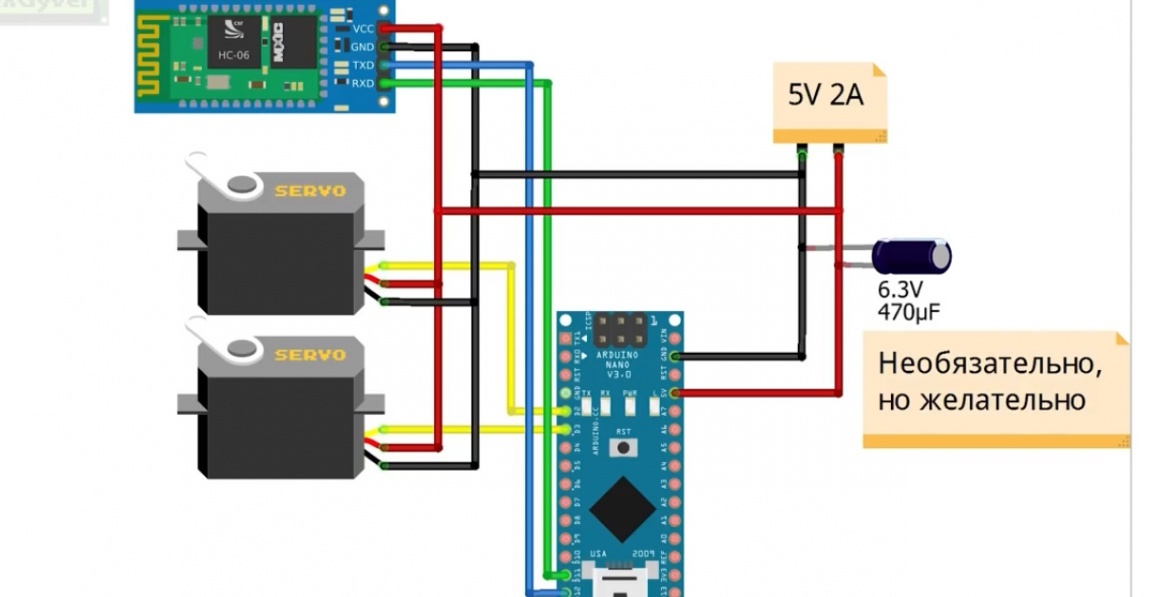
De kracht van de servo moet apart en krachtig genoeg zijn, een USB-lader voor 2A of een powerbank is voldoende. Links naar alle elektronische componenten zijn te vinden op de pagina. PROJECT.
Daar kunt u het archief met het project downloaden, dat alle schema's en firmware heeft. Alle instructies staan ook op de projectpagina. Maak je geen zorgen, er is niets ingewikkelds.
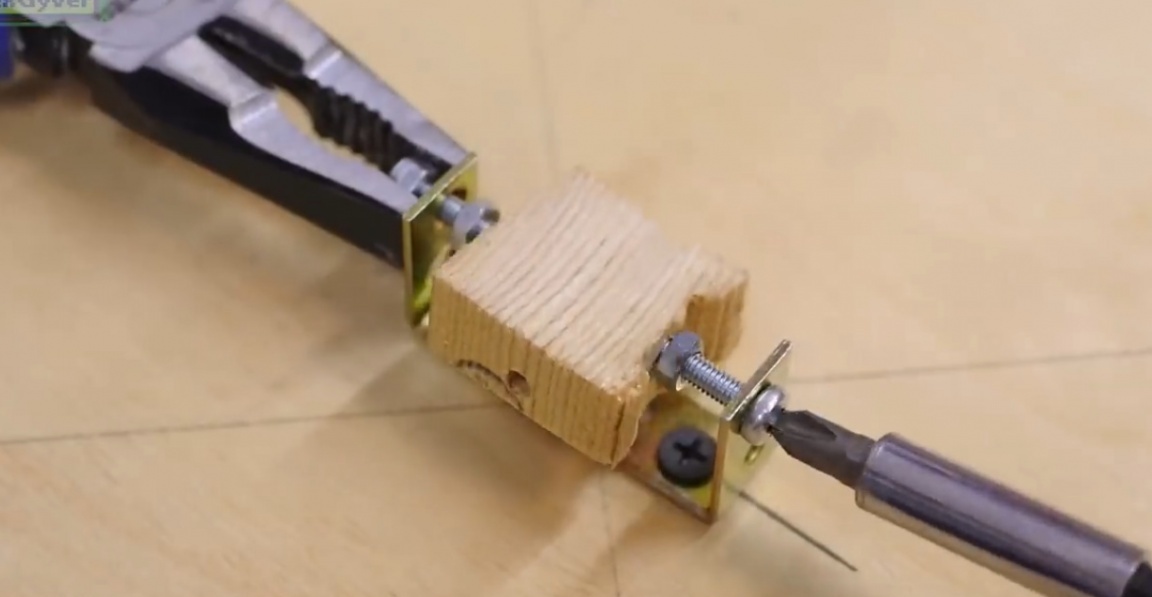
Om te beginnen snijden en boren we blokjes voor het monteren van de scharnieren.

Dan verzamelen we. De kubus met twee gaten staat centraal, beide assen zijn erin bevestigd. Laten we nu de doos met hete lijm aan het scharnier bevestigen.


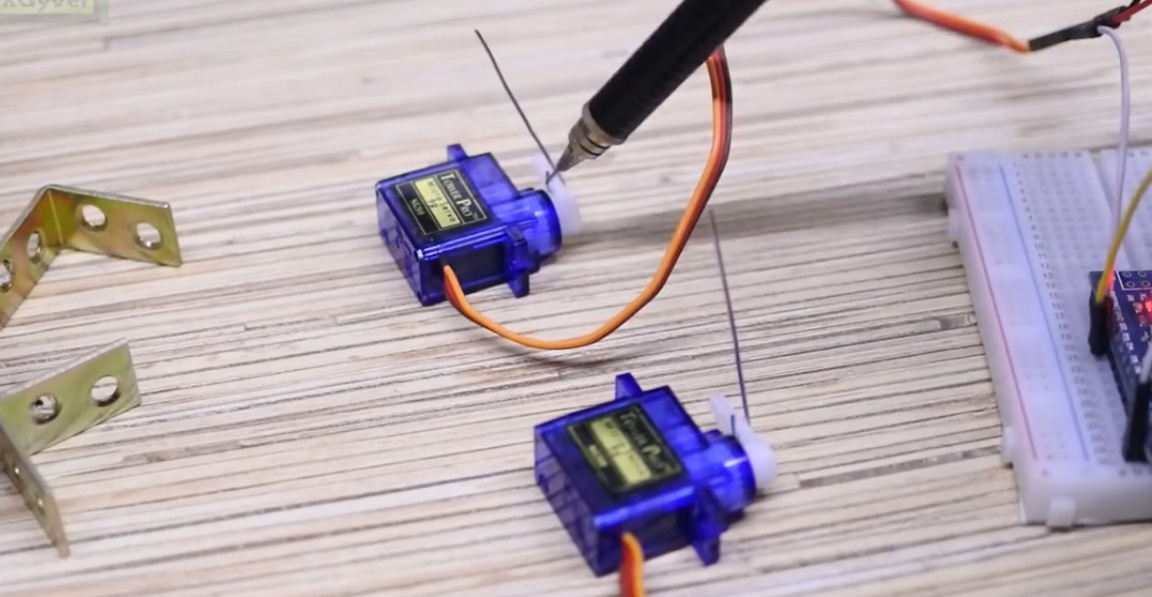
En van onderaf is het scharnier op een klein stuk triplex gemonteerd - het zal handiger zijn. Na het succesvol laden van de firmware en het leveren van stroom, zullen de servo's naar de middelste hoek draaien, in deze positie zal het nodig zijn om de rocker te bevestigen, dat wil zeggen precies in het midden.

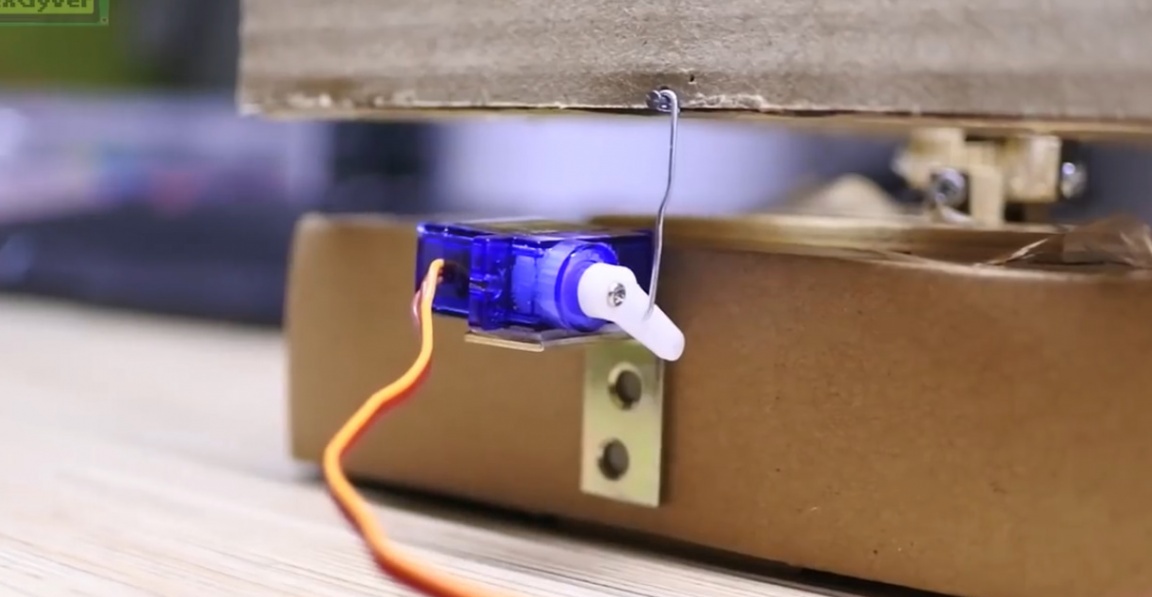
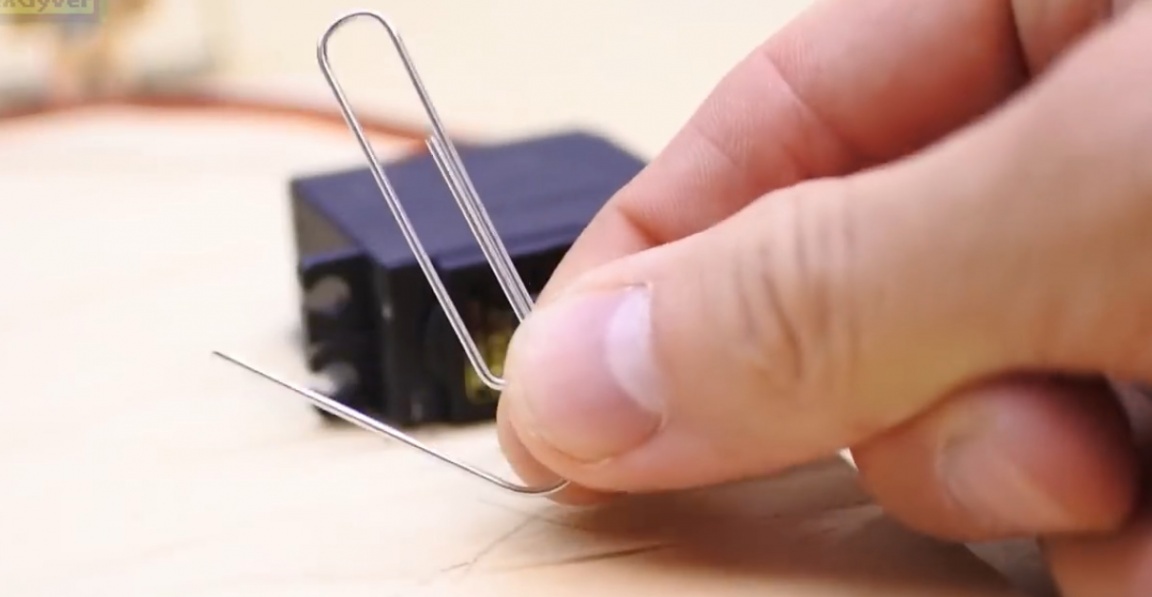
Onze layout staat op een kartonnen doos. Op de 2-zijdige vlakken fixeren we de servo's met behulp van de hoeken. De beweging wordt overgedragen met een paperclip, waaruit we de drijfstangen gaan maken.
Let op de locatie van de draad en de richting van de wip en drijfstang - dit is erg belangrijk! Het is in deze positie dat de schijven op de doos worden gemonteerd.
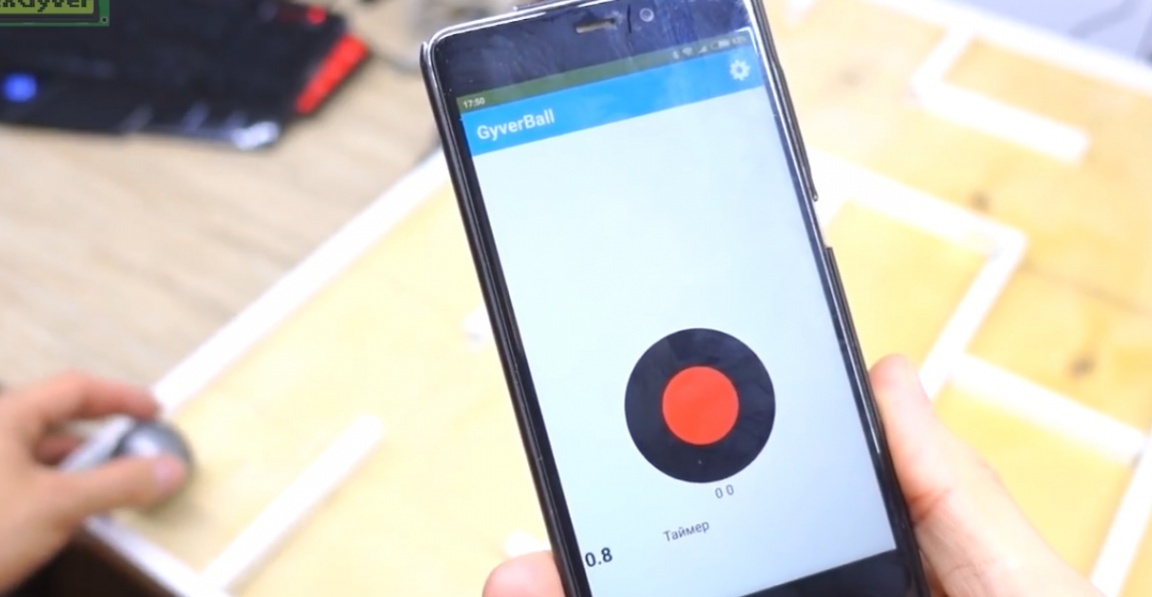
We zetten het uit het archief met het project op onze smartphone en installeren de GyverBall-applicatie.
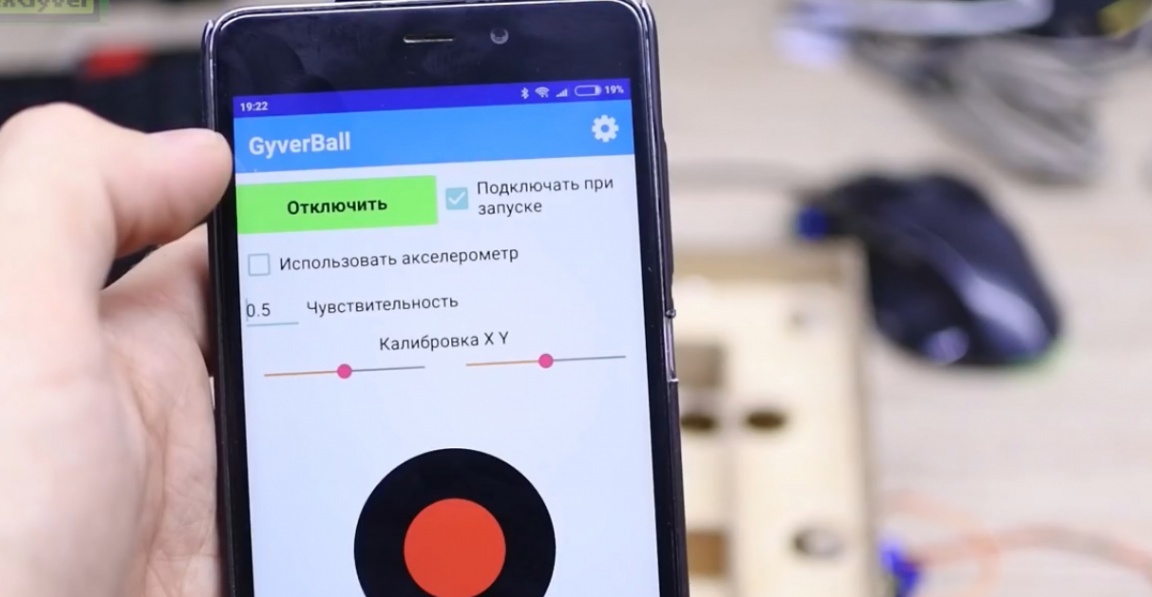
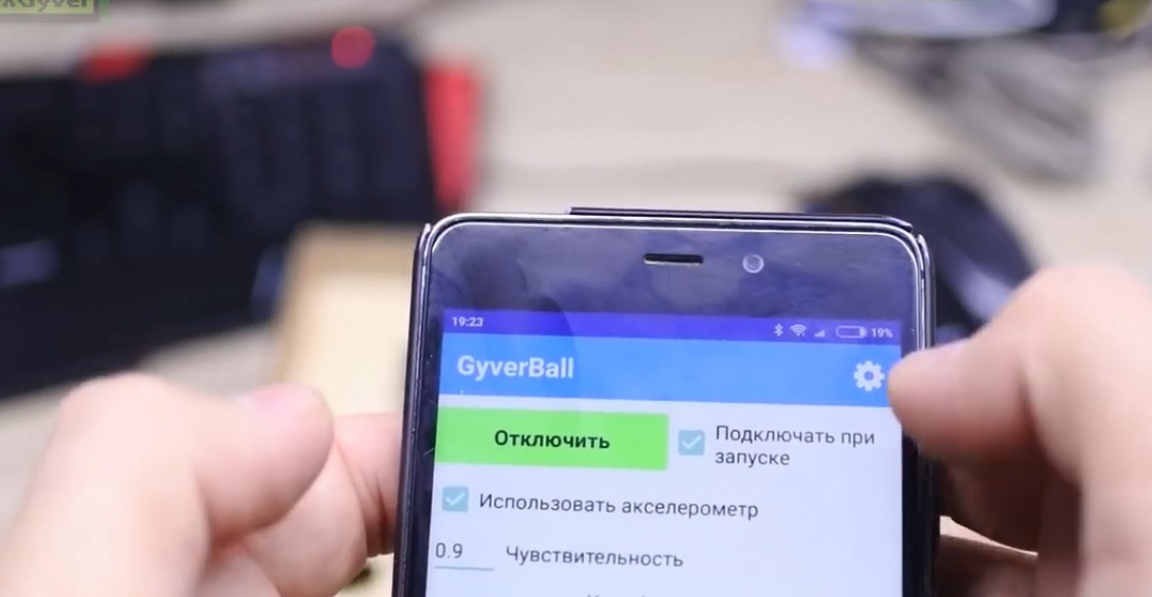
We configureren de koppeling vooraf met de Bluetooth-module, het wachtwoord is 1234 en gaan naar de toepassingsinstellingen. We zijn verbonden. Gedaan. Je kunt de doolhoftafel al besturen. Hier kunt u de gevoeligheid aanpassen en de tafel horizontaal kalibreren zodat de bal nergens in de nulpositie rolt.
Maar het gaafste is natuurlijk de accelerometer. We vinken af en krijgen datzelfde spel met een doolhof met dezelfde controle, maar met absoluut echte fysica.


Het is erg moeilijk om te spelen, omdat het ontwerp erg wankel bleek te zijn en zich een beetje onvoorspelbaar gedraagt. Ook schudt de tafel constant. In eerste instantie leek dit geluid een versnellingsmeter te zijn, maar het bleek dat dit niet het geval was. Het probleem was heel onverwacht. De auteur heeft de Bluetooth-module aangesloten met behulp van de SoftSerial-bibliotheek om het programma te kunnen debuggen via de poortmonitor op de computer. Maar het bleek dat het gebruik van deze bibliotheek de bediening van de servo verstoort. Onthoud dit als u een project doet met bluetooth en servo's. Maar dit weerhield de auteur er niet van om door het doolhof te gaan. Over het algemeen moest bluetooth rechtstreeks als volgt worden verbonden:
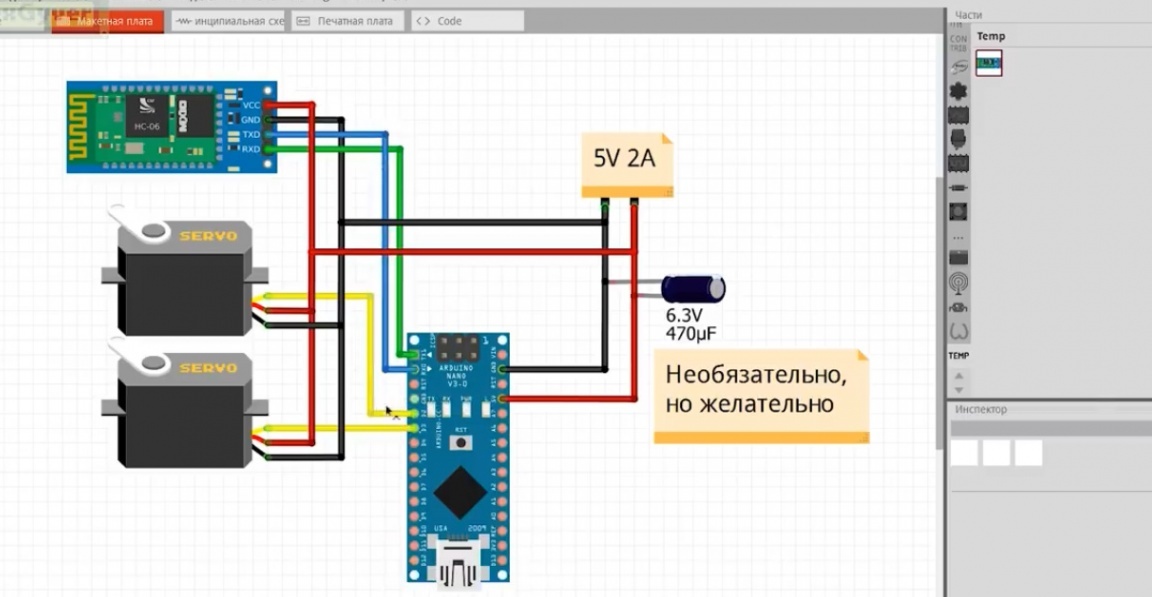
En alles begon perfect te werken, alles is absoluut stabiel en niets schudt in rust. Voordat je Arduino gaat flitsen, moet je de logische pin met Bluetooth uitschakelen, omdat de module de firmware zal verstoren.
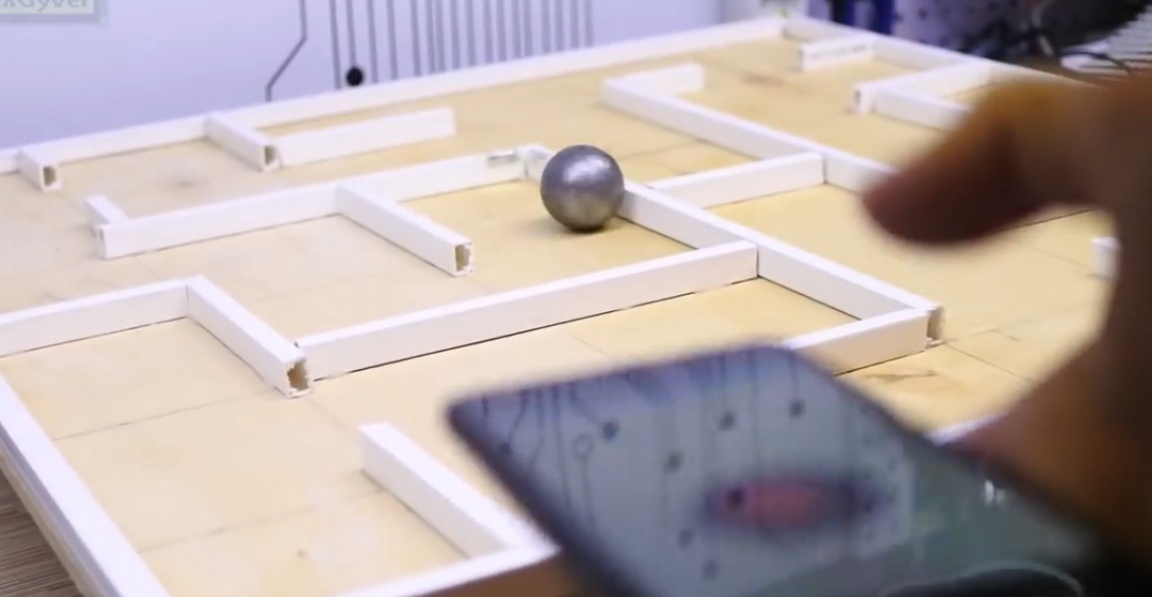
Laten we nu de versie groter maken. Hiervoor hebben we een groot stuk multiplex en grote krachtige servo's nodig.


Dit zijn Chinese mg995, goedkope, maar zeer sterke jongens. De ballen zullen deze keer groter zijn.
De rechterbal is hol, maar de massa is hetzelfde als de linker. Vanwege de grootte koos de auteur een grote.

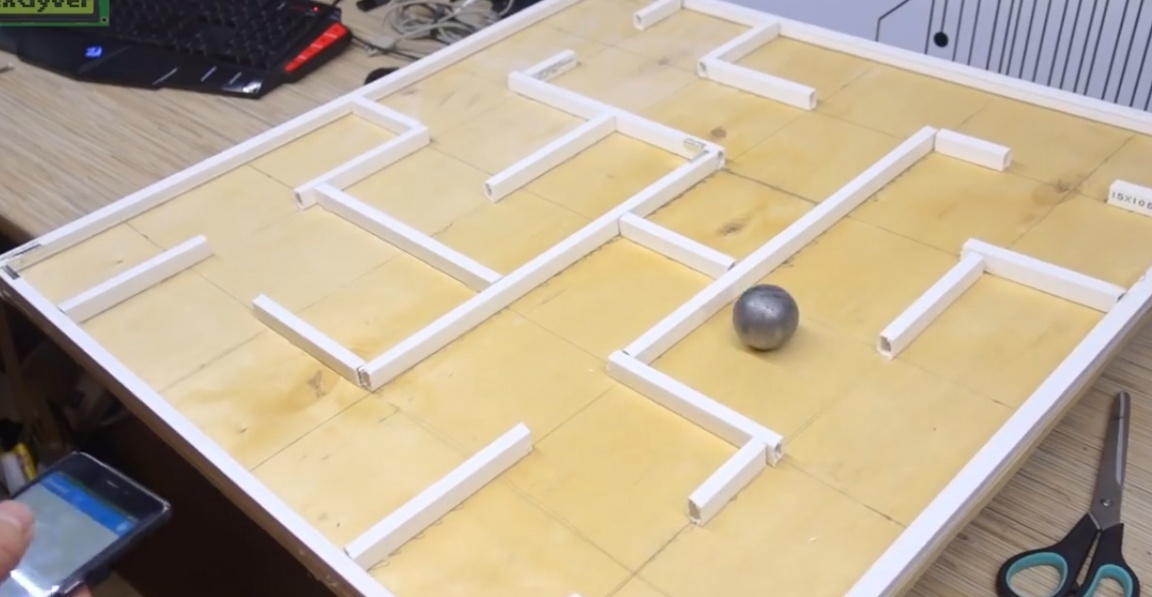
De wanden van het labyrint zijn opgebouwd uit een kabelkanaal van 10 × 15 mm. Het duurde 2,5 m.

Dit keer zal het labyrint zonder gaten zijn, omdat we het niet zullen passeren vanwege de complexiteit, maar voor een tijdje. Het labyrint heeft een heleboel zakken waarin de bal traag zal vliegen wanneer hij snel rond de site probeert te vliegen - het zal interessant zijn. Laten we de opmaak doen.
De auteur maakte een kleine fout en markeerde het veld in 6 delen en tekende een doolhof in een raster van 5 bij 5. Dus moest ik een nieuw en interessanter doolhof bouwen, toch 6 bij 6.
We hebben gebouwd en eindelijk gebouwd! Laten we proberen het in de handmatige modus te doorlopen.
Ja, het is heel eenvoudig, maar het zal moeilijk zijn om er zo snel mogelijk doorheen te komen als je vanaf een smartphone werkt. We zullen de assen, de M4-schroeven, van een stuk hout maken.
De assen zelf worden hier op dergelijke hoeken gemonteerd.
We plaatsen alles precies in het midden van het veld en verzamelen. Op het onderste kleine vierkantje van triplex bevestigen we met schroeven en moeren. We bevestigen de servo's op hete lijm.
Onder de schommelstoelen moet je gleuven maken, er komt een mechanisme rond. We controleren.

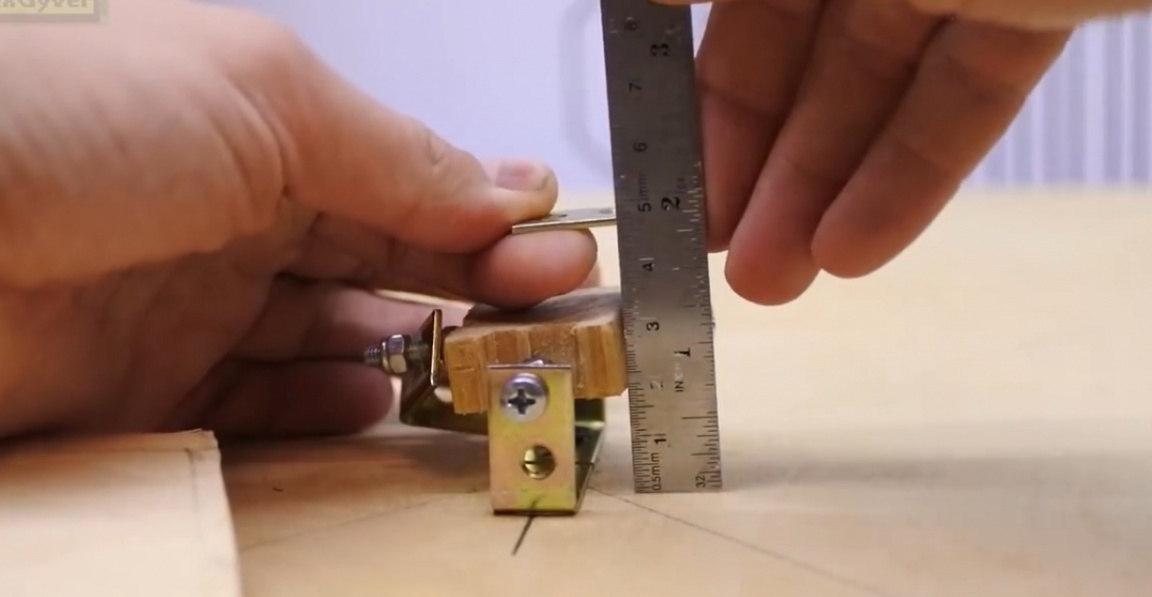
We maken een drijfstang van een paperclip van maat XXL. Buig de clip voorzichtig zo ver mogelijk rond de schommelstoel in een rechte hoek, zodat niets de rotatie zou belemmeren. We meten de hoogte tot het onderste stuk multiplex en buigen op dezelfde hoogte.


Vervolgens maken we scherpe u-vormige onderdelen om de drijfstang aan het veld te bevestigen en te hameren.

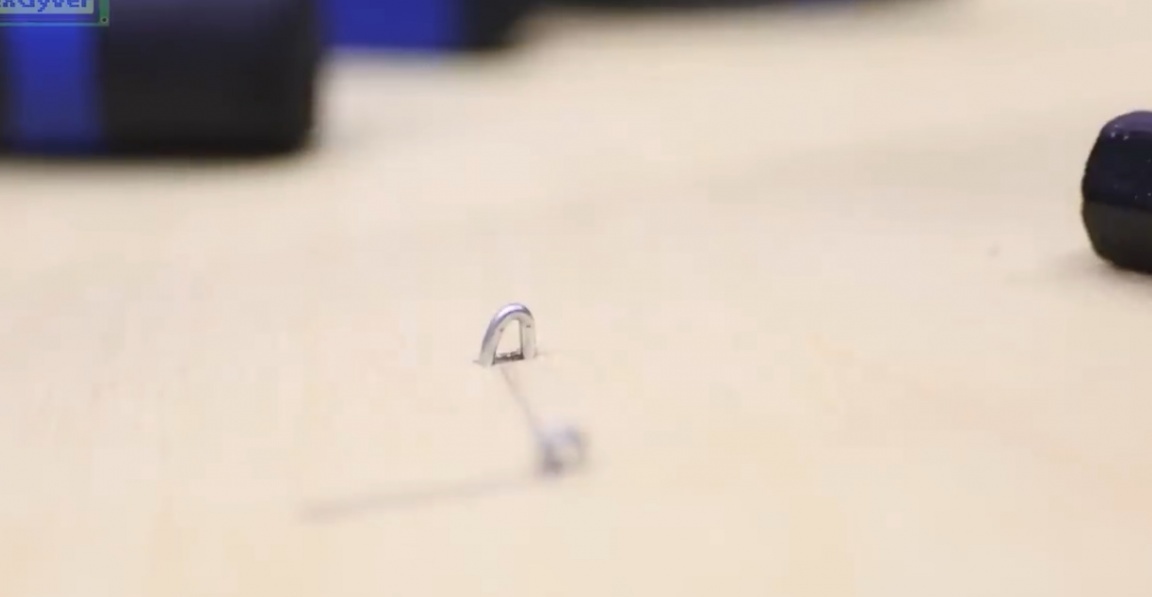
We verzamelen en verifiëren.
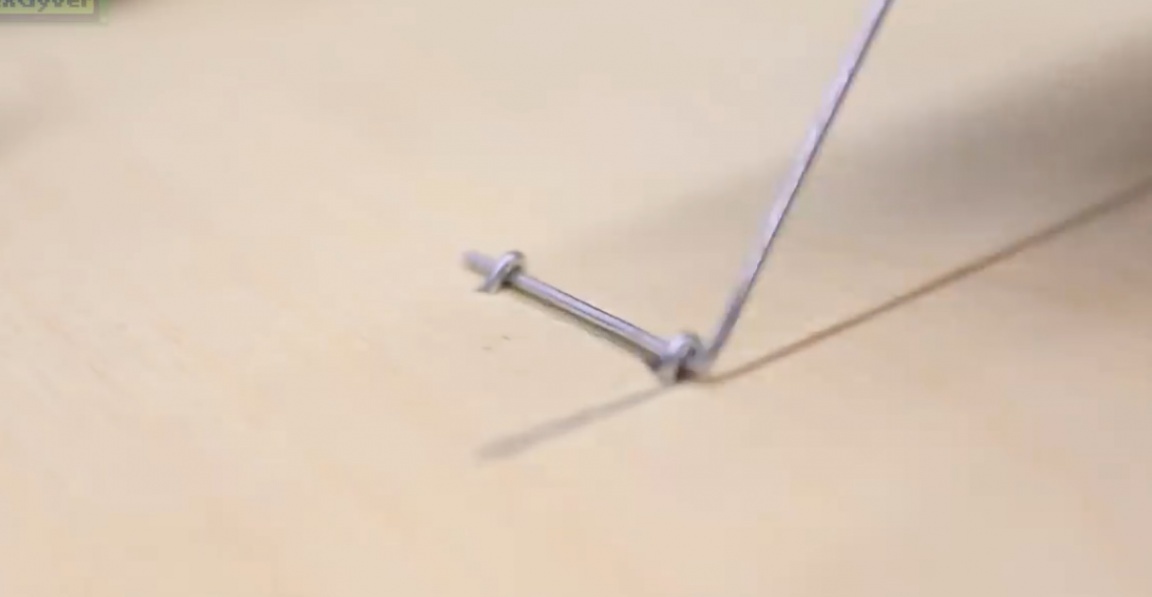


Geweldig! Alles draait vrij rond. Het blijft over om de poten van enkele stukjes hout te bevestigen, zodat het mechanisme niet op de vloer rust.
We zijn aangesloten op de powerbank en jij kunt spelen. Laten we proberen door het doolhof te gaan.

Het is veel moeilijker om dit vanaf de telefoon te doen dan in de handmatige modus. De auteur heeft bijna al zijn vallen verzameld die tijd besteden aan het passeren.
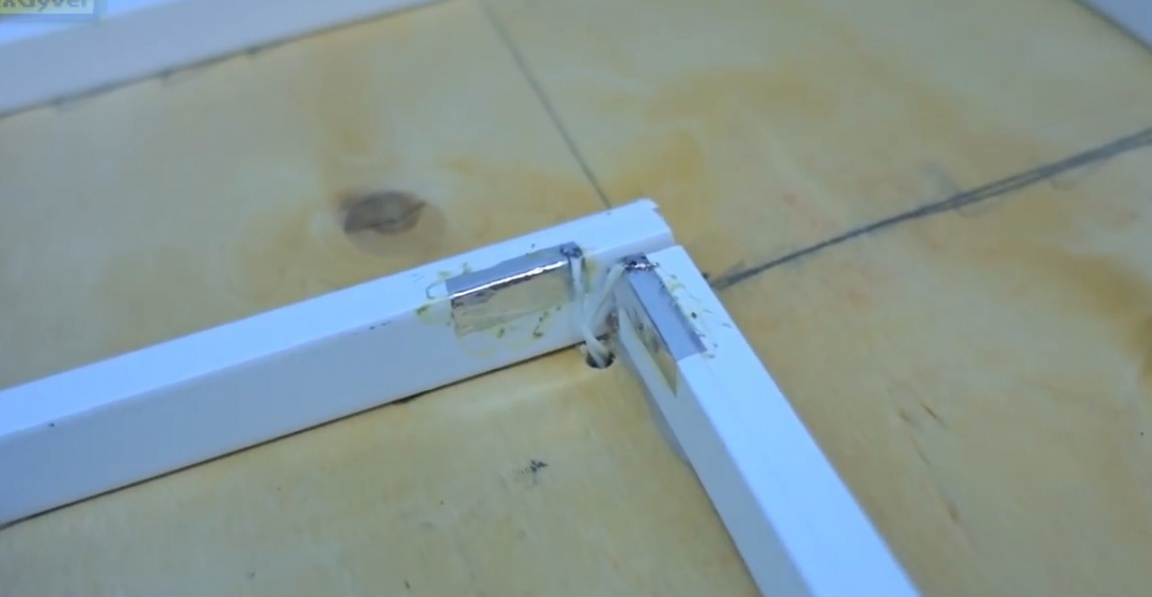
Toen dacht de auteur en besloot: waarom geen automatische timer maken. De bal is van metaal, laat hem zelf sluiten 2 contacten die Arduino als knop zal ondervragen. We hebben één knop nodig bij de start en één bij de finish. We markeren de plaatsen die door de bal worden aangeraakt.


Vervolgens hebben we folie nodig. Lijm de stukjes folie zodat de bal ze kan sluiten.

Na het snel voltooien van de aanvraag ontving de auteur precies zoiets. Wanneer de bal de starthoek raakt, wordt de timer gereset en start. Als je de finish aanraakt, stopt de timer.
Zo kun je de doorgang van het doolhof ontdekken. Maar één laag folie was niet genoeg, het is beter om veren te plaatsen. Wie zal het doen? Plaats de veren beter. Eigenlijk zijn we hier vandaag een nostalgisch speelgoed gebleken in een materiële versie van multiplex, een kabelkanaal en niet zonder de hulp van geavanceerde technologie.
Bedankt voor je aandacht. Tot binnenkort!
Video: