

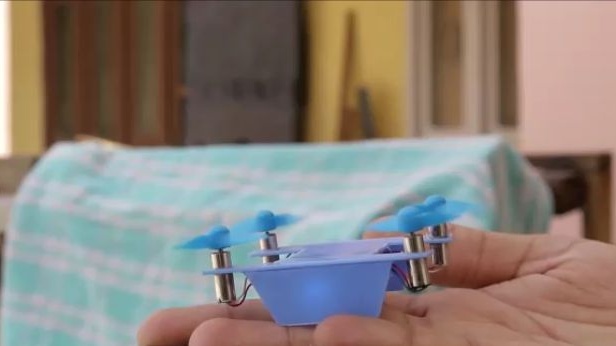
Goede dag voor alle lieve vrienden! In het artikel van vandaag wil ik je een nogal interessante laten zien zelfgemaaktnamelijk een zelfgemaakte quadrocopter. Als je van vliegtuigmodellering houdt, maar het is vrij moeilijk voor je om een vliegtuig te monteren, dan kun je beginnen met een quadrocopter. In dit artikel wordt in detail beschreven hoe u uw eigen zelfgemaakte quadrocopter samenstelt. Deze assemblage zal bestaan uit de goedkoopste componenten die in Chinese winkels zijn gekocht. Natuurlijk zal deze micro-quadrocopter niet opscheppen over zijn vliegeigenschappen en zelfs over enkele andere parameters. Maar dit zal u helpen om de juiste locatie van de massa op het vliegapparaat en de basisinstellingen en de basisfuncties van de quadrocopter onder de knie te krijgen. Nou ja, genoeg van het lange voorwoord, laten we gaan!
En dus hebben we voor dit zelfgemaakte product nodig:
- elektromotoren 4 stuks. (2 stuks CW en 2 stuks CCW worden verkocht in een set van 4 stuks.)
- geschikte schroeven voor elektromotoren 4 stuks.
- Een geschikte batterij van 3,7 V.
- oplaadkabel voor de accu.
- besturingskaart.
- uitrusting voor de besturingskaart.
- een vel ABS-plastic (u kunt een doos van een dvd-schijf gebruiken).
- draden.
- term krimp.
Van de tools hebben we ook nodig:
- soldeerbout.
- administratief mes.
- boren.
- oefeningen.
- liniaal.
- marker.
- dubbel plakband.
- terma lijm.
- superlijm.
Eerst moeten we een frame maken waarop de quadrocopter zal worden gemonteerd. Voor de vervaardiging van het frame moeten we een vel plastic nemen, ABS-plastic is het meest geschikt, omdat het erg licht is, wat erg goed is voor een micro-quadrocopter. Maar als je zo'n plastic niet hebt, dan is een doos van een dvd-schijf of een voedselcontainer perfect.

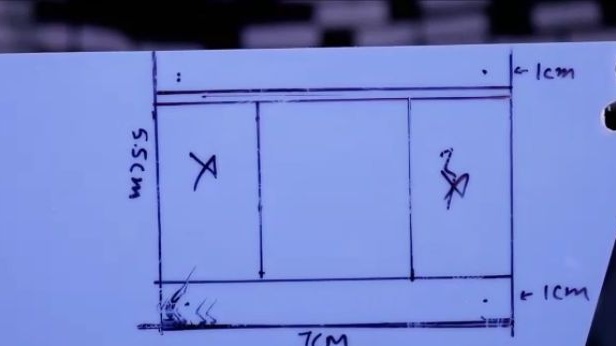
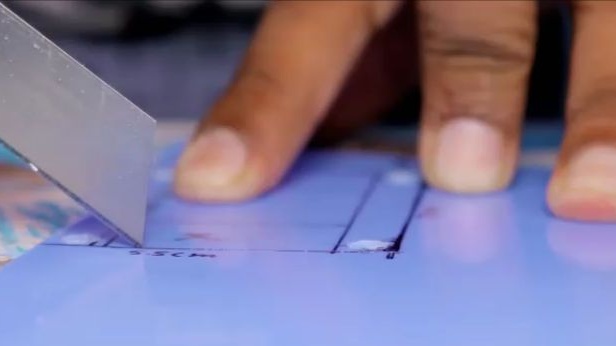
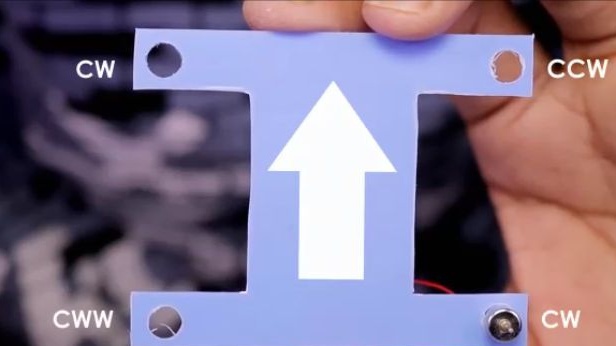
Nadat we het plastic voor het frame hebben behandeld, maken we op het plastic zelf ongeveer dezelfde markeringen als die op de onderstaande foto. Let ook op de gemarkeerde punten, op deze plaatsen worden elektromotoren geïnstalleerd, wat betekent dat ze zo nauwkeurig en symmetrisch mogelijk moeten worden gemarkeerd.
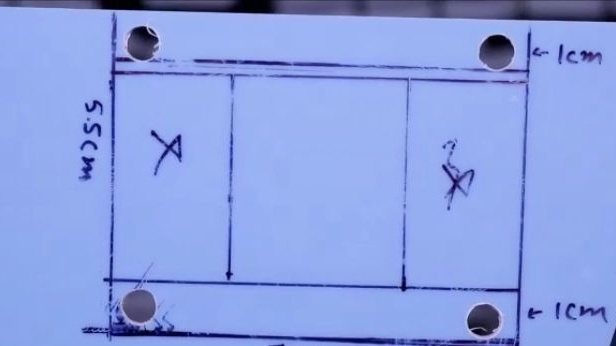
Onze volgende stap is het boren van gaten voor het monteren van motoren. Dit is een zeer belangrijke fase, aangezien de bestuurbaarheid en het algemene gedrag van de quadrocopter hiervan af zullen hangen. Voor boren is het beter om een getrapte boor te gebruiken, het zal erg handig zijn om een duidelijke omtrek te maken. Maar als u er geen heeft, hoeft u alleen maar een boor met een geschikte diameter te nemen, dat wil zeggen dat de diameter van de boor overeenkomt met de diameter van de elektromotor.

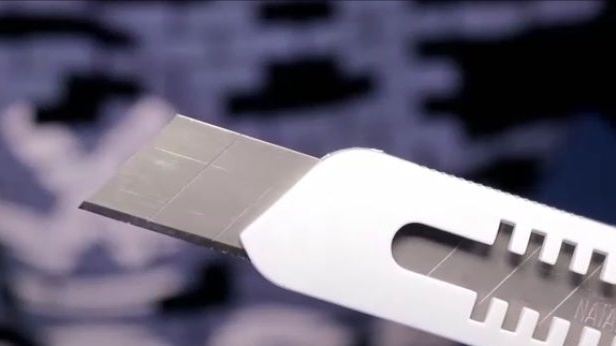
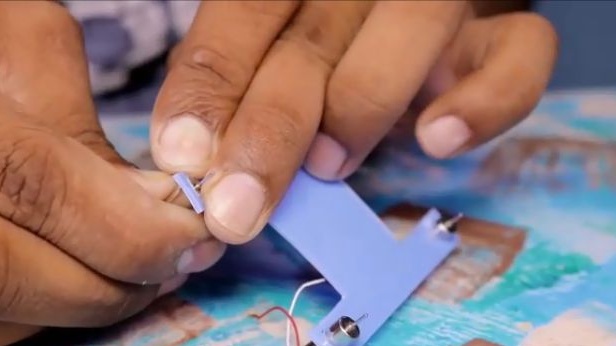
Vervolgens moeten we het frame zelf uitsnijden.We snijden met een administratief mes. Ik raad je aan om dit te doen met een liniaal, een liniaal aan te brengen, hard te drukken, vast te houden met een mes en af te breken, het plastic te buigen. Probeer het zo zorgvuldig mogelijk te doen.
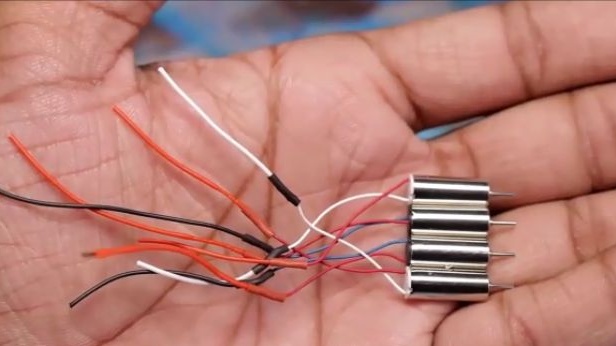
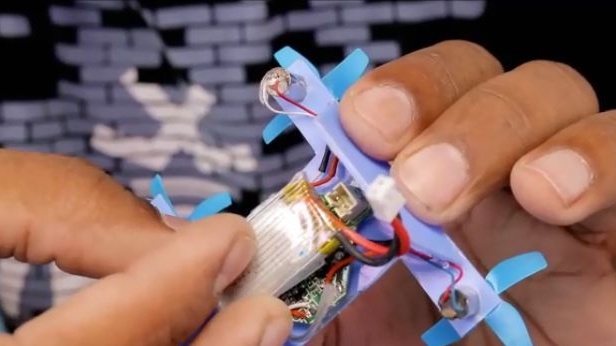
Laten we verder gaan met het installeren van elektromotoren. Dit is niet zo eenvoudig als het lijkt, aangezien de aangekochte Chinese kit 2 CW-motoren en 2 CW-motoren bevat. Maar eerst vergroten we de lengte van de draden op de elektromotoren, omdat hun lengte voor ons simpelweg niet genoeg zal zijn. Soldeer de 3-4 cm draadsegmenten en isoleer de term met krimp.
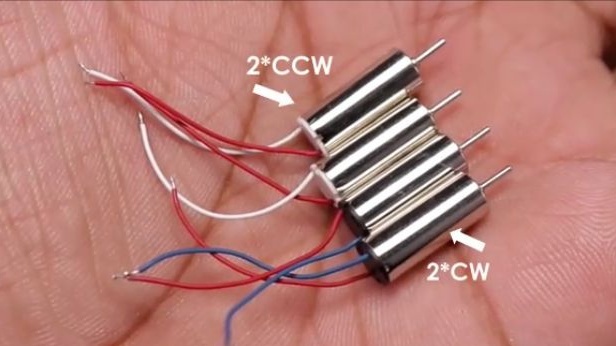
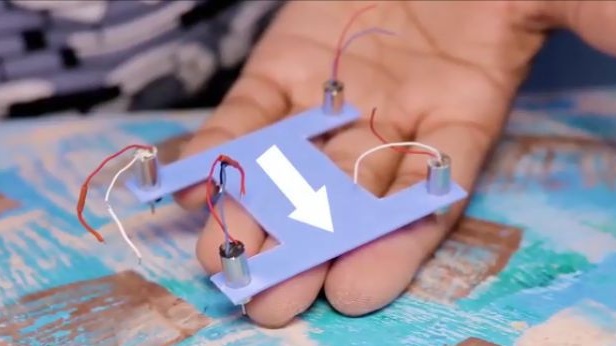
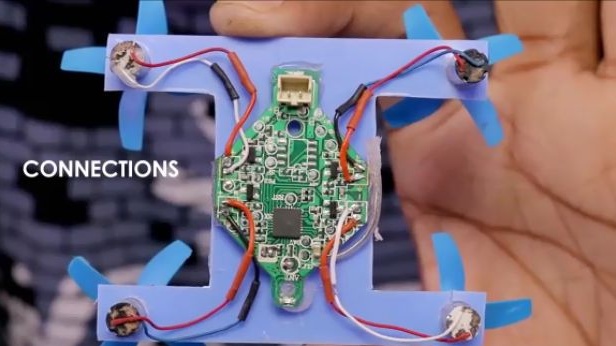
De onderstaande afbeelding laat zien hoe u elektromotoren installeert. De pijl op de afbeelding wijst naar de voorkant van de quadrocopter. En installeer de elektromotoren volgens de afbeelding.
De volgende stap is het installeren van schroeven op de motorassen. Ook hier is het niet zo eenvoudig. Als je goed naar de schroef kijkt, dan zie je het opschrift "B1" of "A2". Wat betekent het dat een schroef met een classificatie van "B1" moet worden geïnstalleerd op een motor met een classificatie van CW en een schroef van "A2" op een CCW-motor.
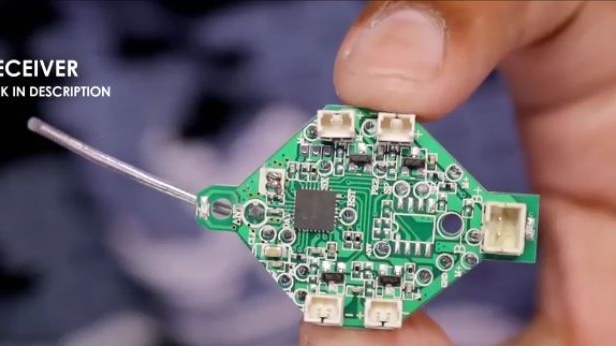
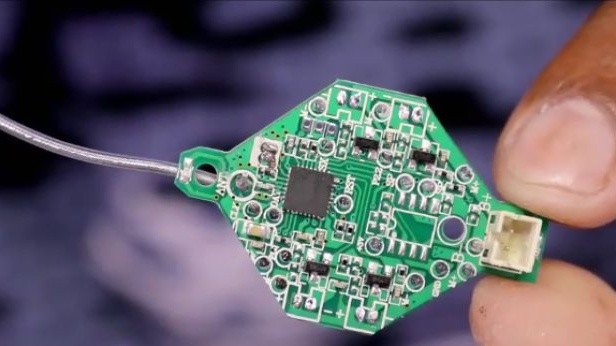
Vervolgens nemen we de quadcopter-besturingskaart en solderen alle connectoren voor elektromotoren eruit.



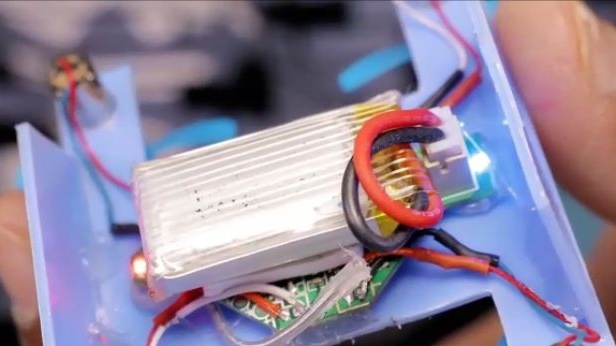
De besturingskaart moet strikt op het frame van de quadrocopter worden gelijmd, zoals aangegeven op de onderstaande foto. En dit bord moet worden geïnstalleerd met behulp van een lijmterm, het is natuurlijk beter om het bord met schroeven te schroeven, maar de schroeven zijn veel zwaarder dan een paar druppels lijmterm.
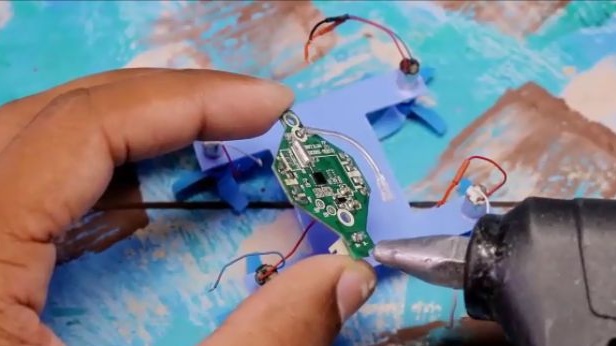
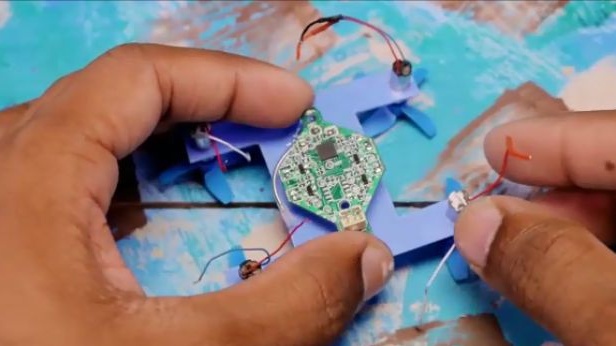
Soldeer de contacten van de elektromotoren op de besturingskaart op dezelfde manier als weergegeven in de onderstaande foto.
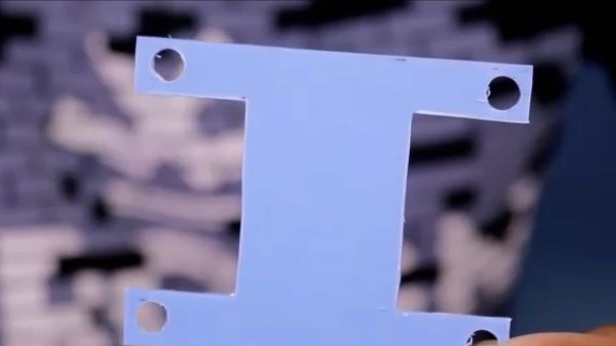
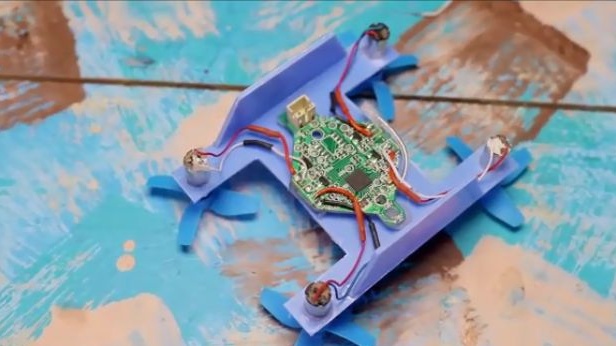
Vervolgens hebben we uit hetzelfde plastic een geschikte trapezium gesneden. We hebben 2 stuks van dergelijke blanco's nodig. Ze vervullen de rol van beide benen en quadrocopterbescherming.

Het gesneden trapezium moet op de aangegeven plaatsen worden gelijmd. Lijm het beste op superlijm. We plaatsen superlijm op de trapezium, wachten ongeveer een minuut, brengen het op het frame aan en wachten tot de lijm is uitgehard.
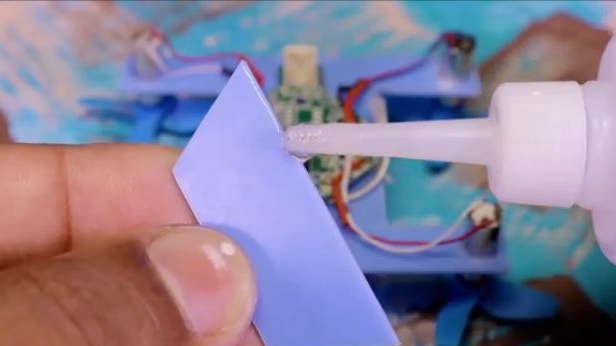


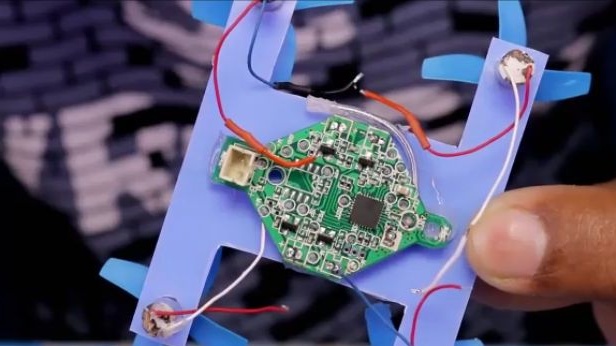
Vervolgens moeten we de batterij op de behuizing bevestigen, we zullen deze bevestigen met dubbele tape.
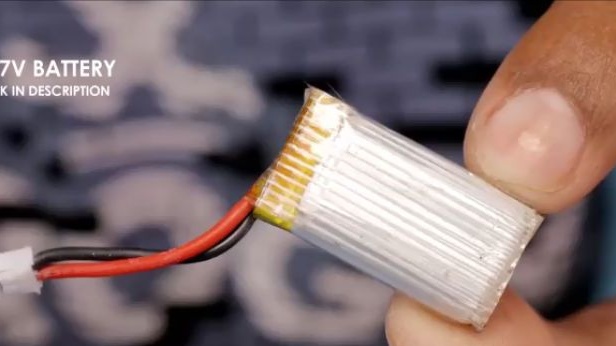

We steken de connector van de batterij in de besturingskaart en als de blauwe LED oplicht, is alles in orde.
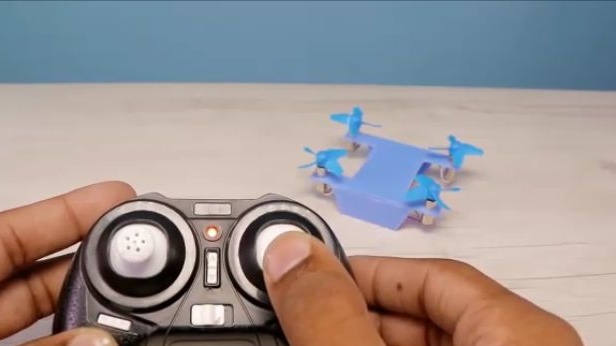
Schakel de apparatuur in nadat u de besturingskaart hebt ingeschakeld. Door de sticks te verplaatsen, maakt de apparatuur verbinding met het controlepaneel en stopt de blauwe LED met knipperen.

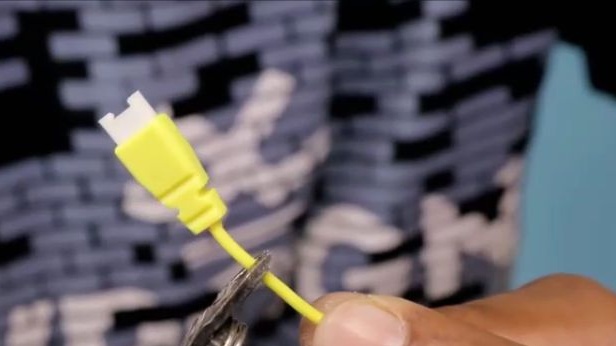
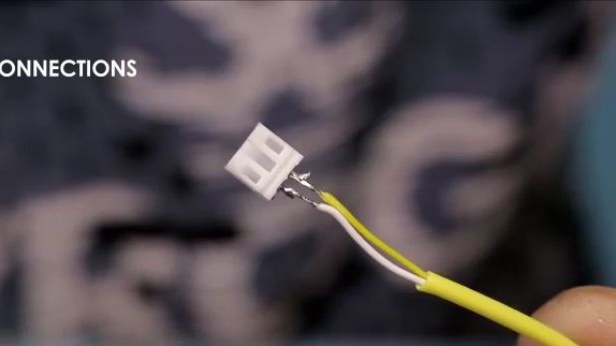
U moet nadenken over het opladen van de batterij van onze micro-quadrocopter. Neem hiervoor een kant-en-klare USB-kabel met een oplaadmodule. Maar omdat de connectoren niet pasten, heeft de auteur van het zelfgemaakte product de connectoren gewoon gesoldeerd.
Alles is klaar! Nu blijft het om de snelheid van elke motor aan te passen en te genieten van de vlucht. Er moet ook aan worden toegevoegd dat om elektromotoren te starten, het nodig is om de stokjes naar het midden te verkleinen en dat de motoren met minimale snelheid gaan draaien. Als resultaat kregen we een leuke quadrocopter, waarmee het interessant zal zijn om te spelen, zowel voor een kind als voor een volwassene, omdat hij weet hoe hij coups moet uitvoeren en vrij snel moet vliegen.

Hier is een video van de auteur met een gedetailleerde montage en testen van dit zelfgemaakte product:
Bedankt voor jullie aandacht en succes bij toekomstige projecten, vrienden.