
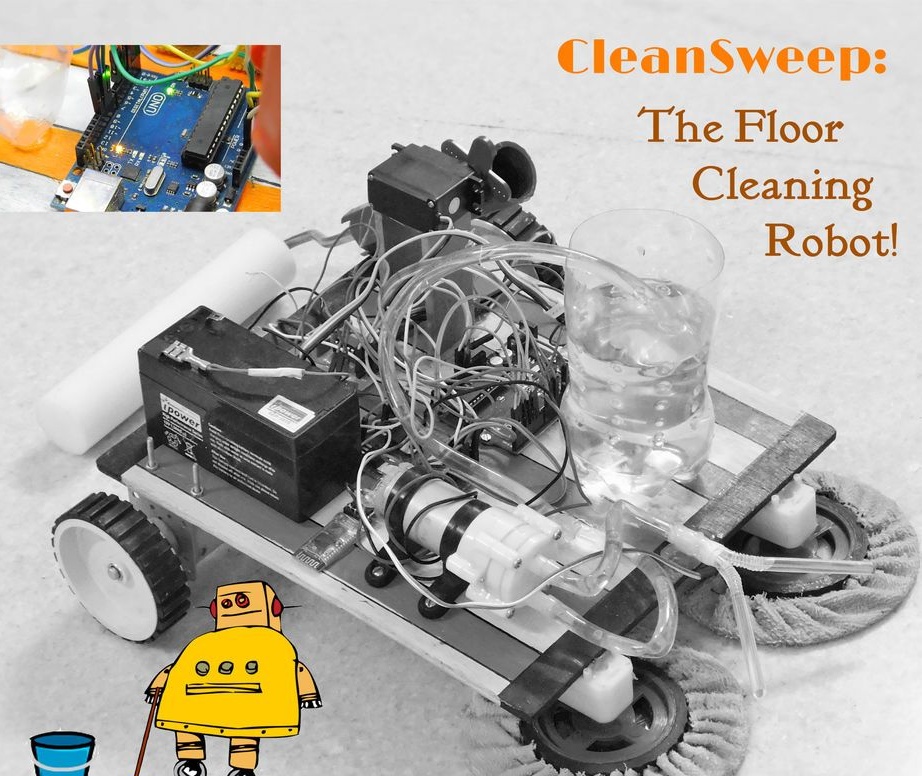
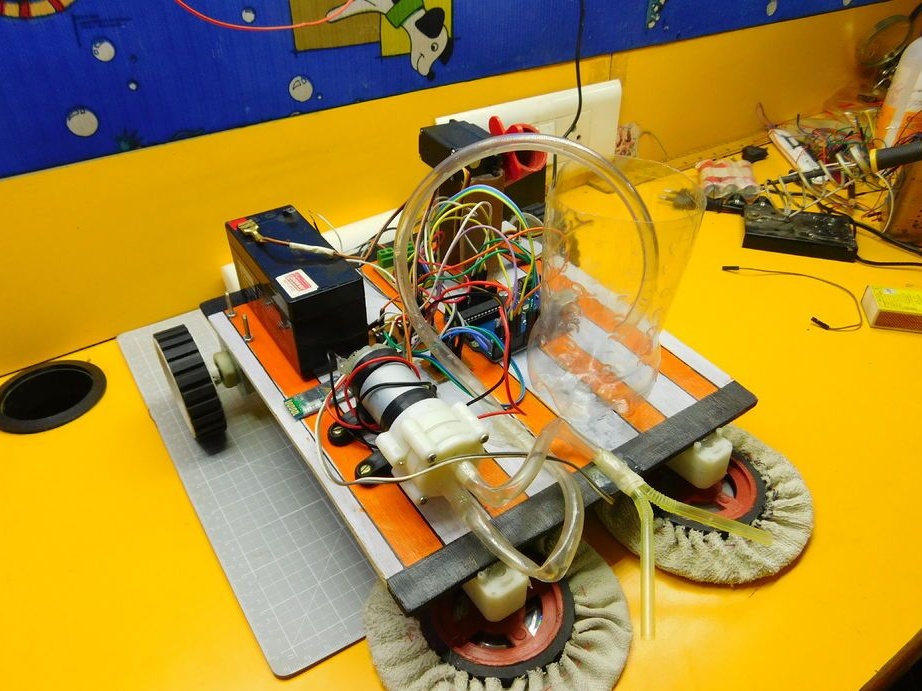


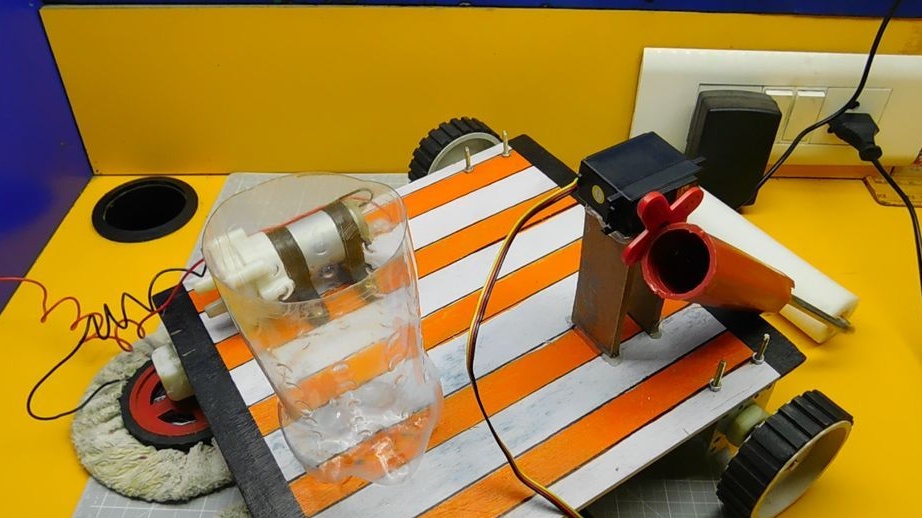
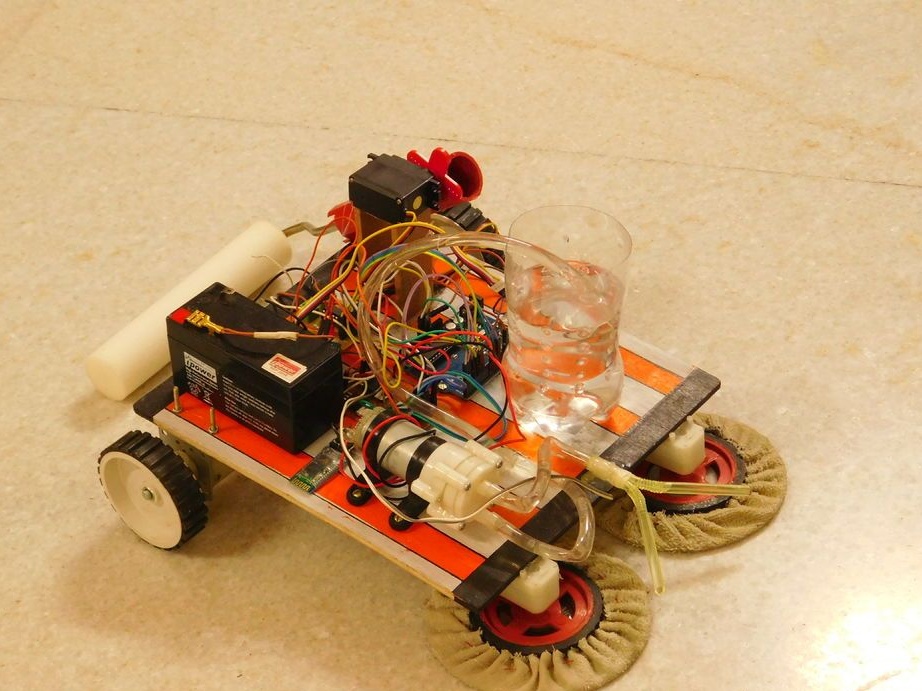
De robotDe oogstmachine heeft in zijn arsenaal twee roterende borstels gemonteerd aan de voorkant van de reductiemotoras. De versnellingsbak draait met een toerental van 75 tpm. De robot heeft een watertank aan boord. Aan de achterkant van de robot is een rol bevestigd. De robot wordt gemengd met behulp van wielen die op de as van de reductiemotor zijn bevestigd. De stofzuiger wordt bediend via smartphone via bluetooth. In de toekomst is de Master van plan de robot volledig autonoom te maken. Laten we eens kijken hoe dit apparaat werkt.
Gereedschap en materialen:
-Motor versnelling 100 rpm -2 stuks;
-Wielen voor de motor -2 stuks;
-Motorreductor met een wiel van 75 tpm - 2 stuks;
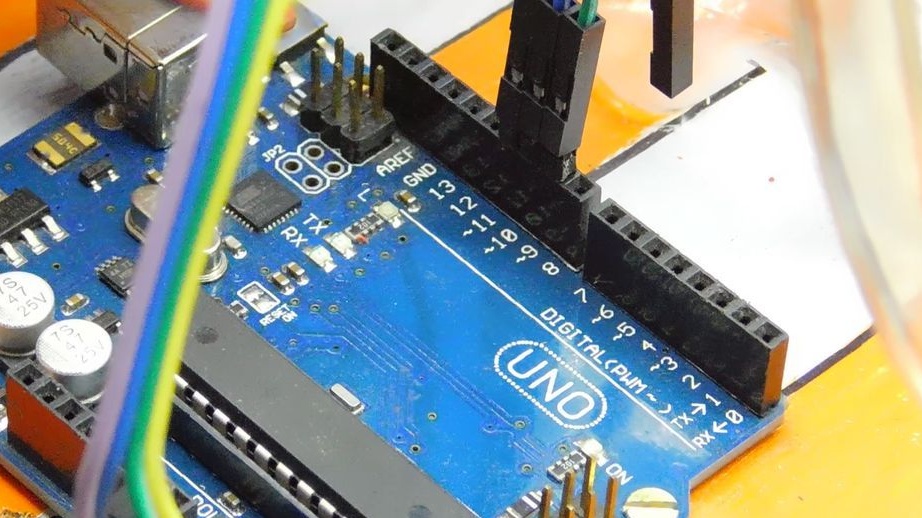
-Arduino UNO;
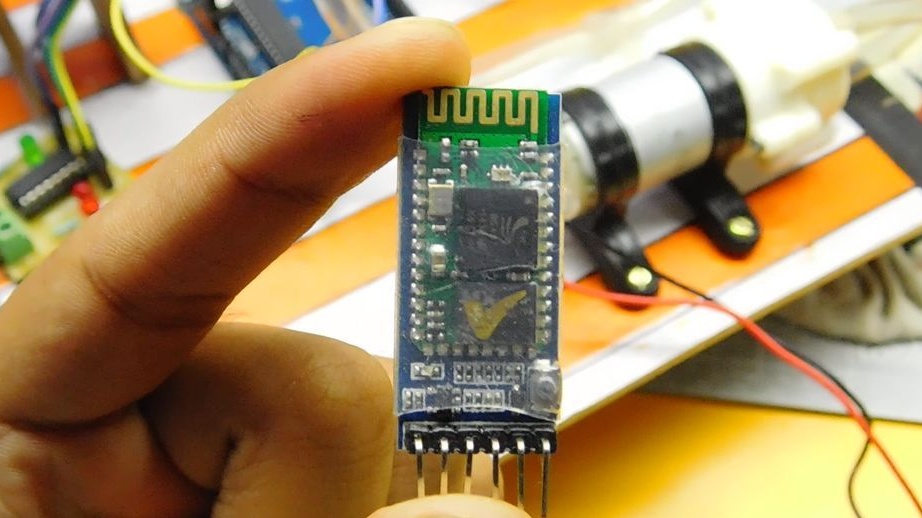
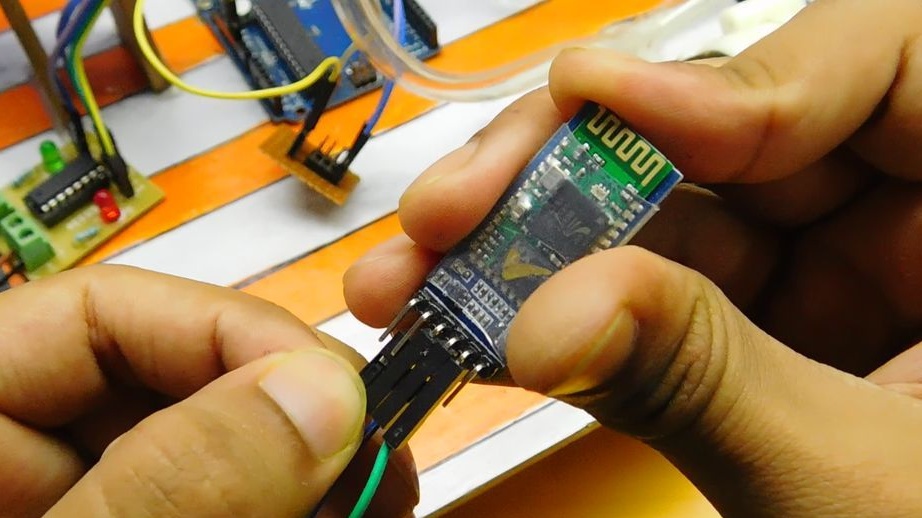
- Bluetooth-module HC-05/06;
-Driver L293D;
- Servomotor (180 graden rotatie);
-12V batterij;
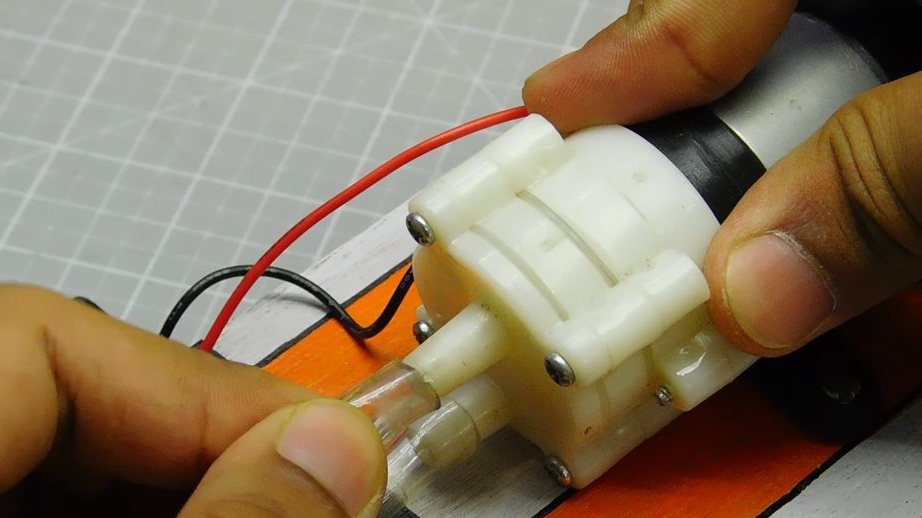
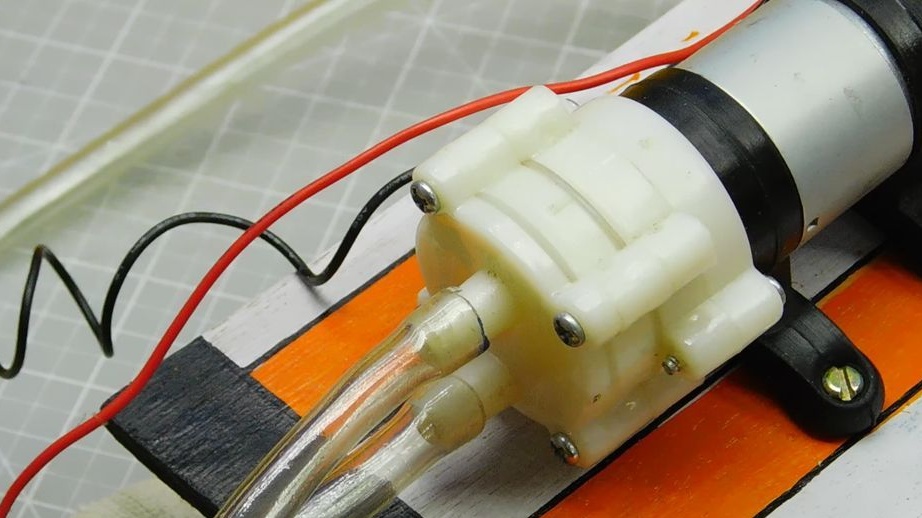
- Pomp 12 V;
Transistor TIP31C;
Transistor TIP122;
- CD-station - 2 stuks;
- Verfroller;
- stoffen servetten;
- naald met draad;
-Tube;
-Draad;
- Truien;
-Montagebord;
-Fasters;
-Plex;
-Plastic fles;
-Soldeerbout;
-Lijmpistool;
-Boor;
- Tang;
-Dremel;
- penseel;
-Schilderen;
-Marker;
- schaar;











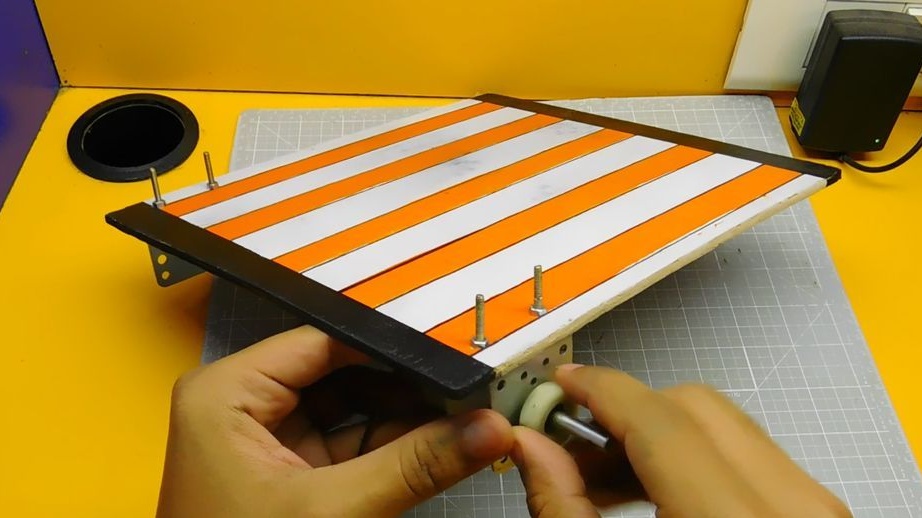
Stap één: Stichting
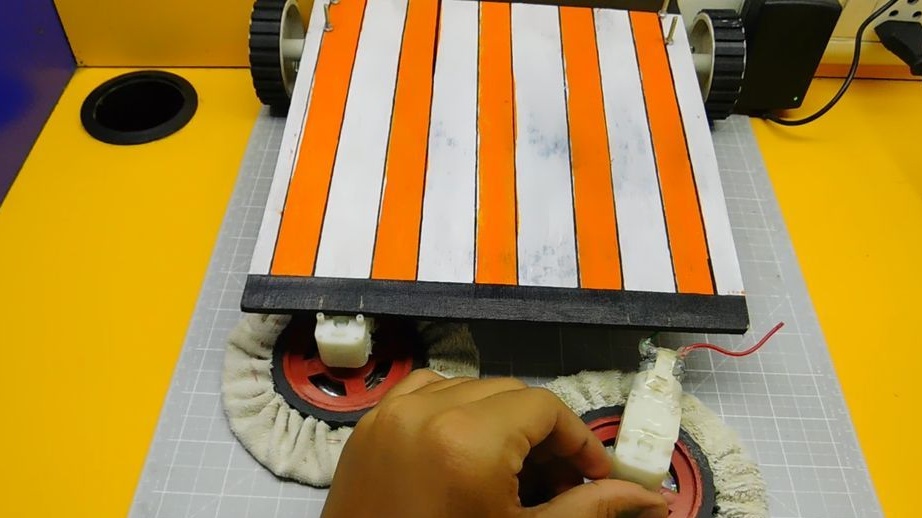
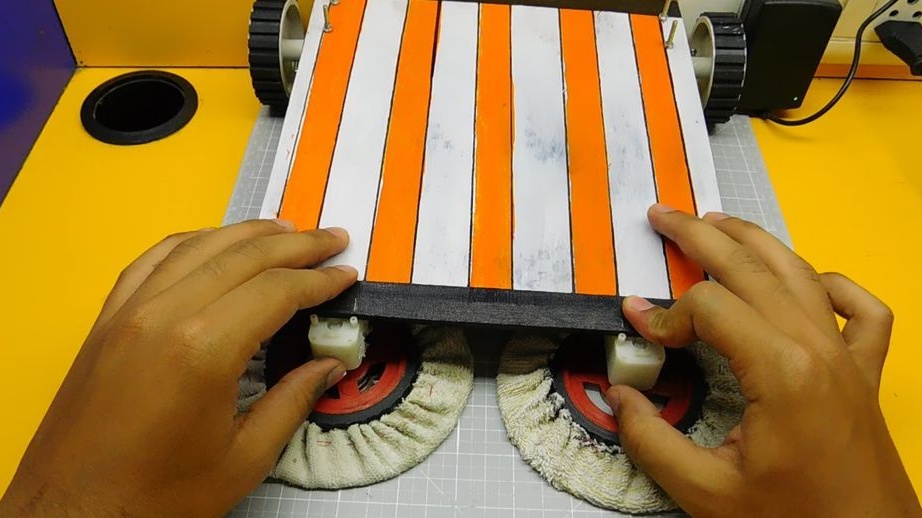
Van multiplex snijdt de basis. De afmetingen van de basis zijn 30 * 22 cm Schildert de basis. Enerzijds fixeert het de reductiemotor. Zet de reductiemotor coaxiaal vast aan de andere kant van de basis.



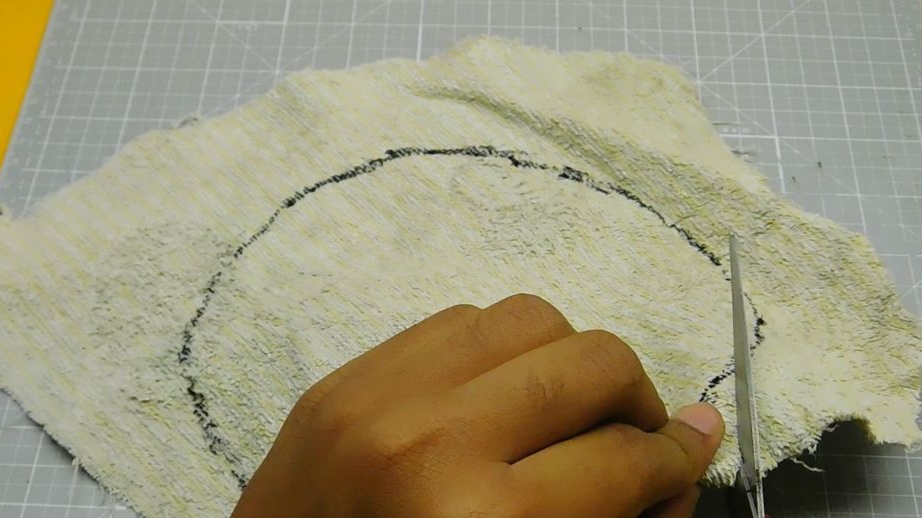
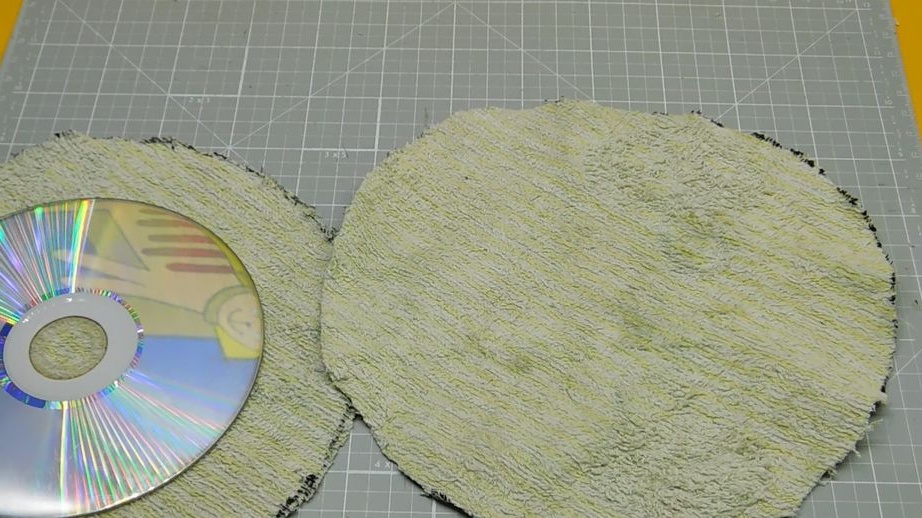
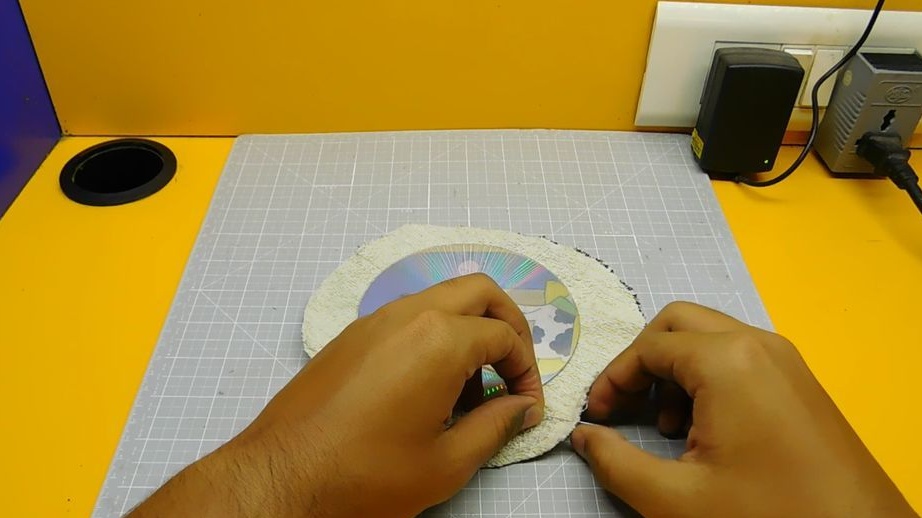
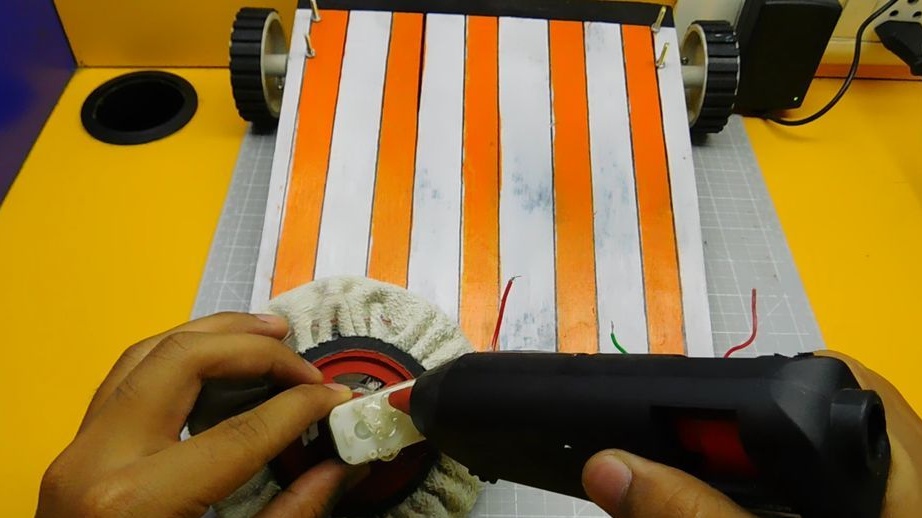
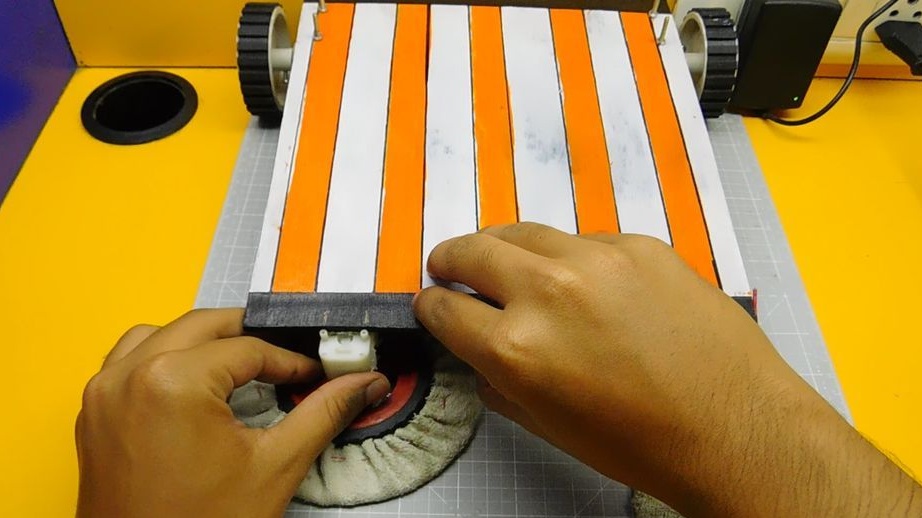
Stap twee: borstels
De meester maakte penselen van oude cd's. Snij een doek. Omhulde haar drive. Herhaalde bewerking met een andere schijf. Bevestigde de schijven met smeltlijm op het wiel van de reductiemotor. Beveiligde beide reductiemotoren voor het platform.








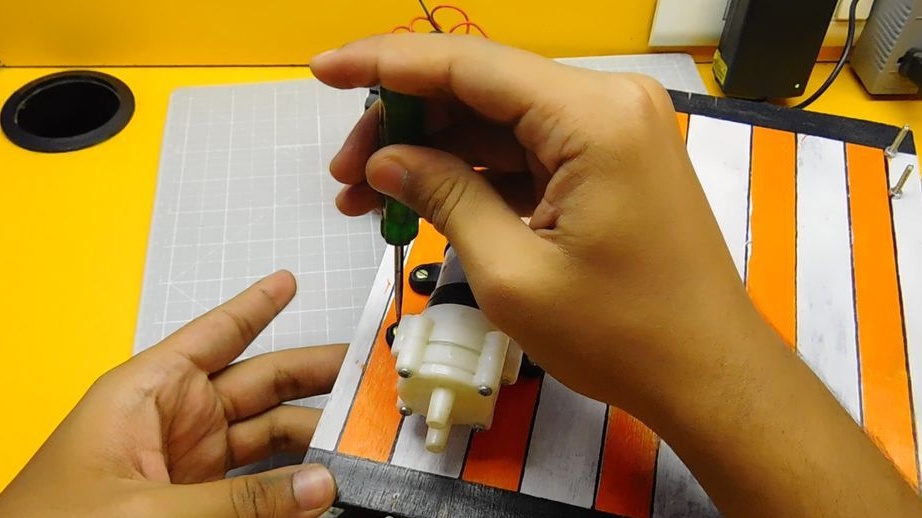
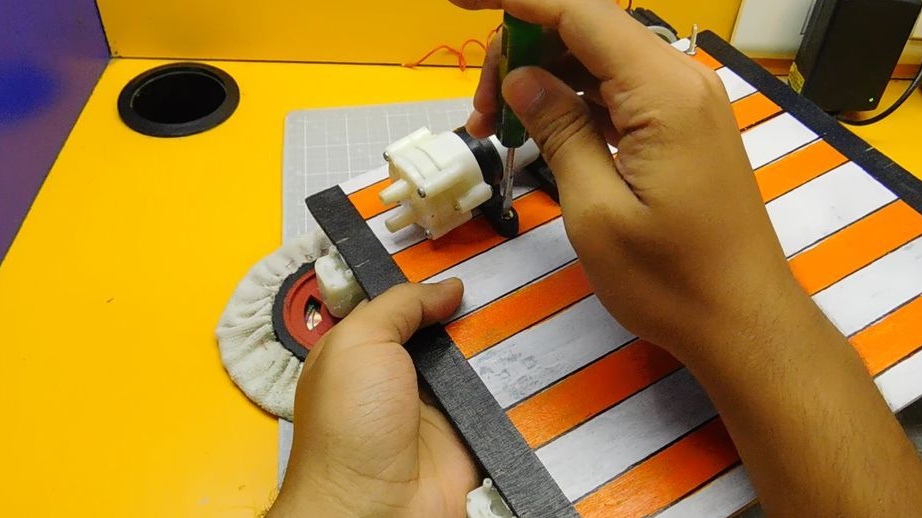
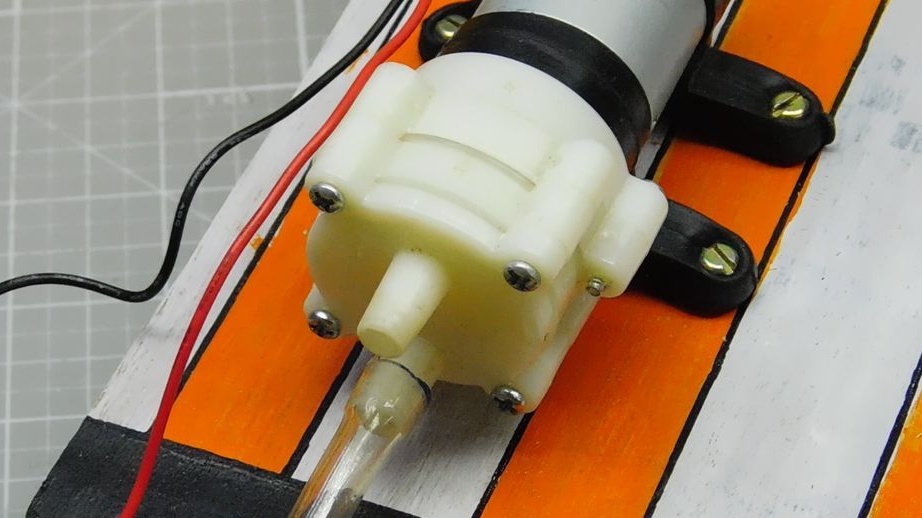
Stap twee: watervoorziening
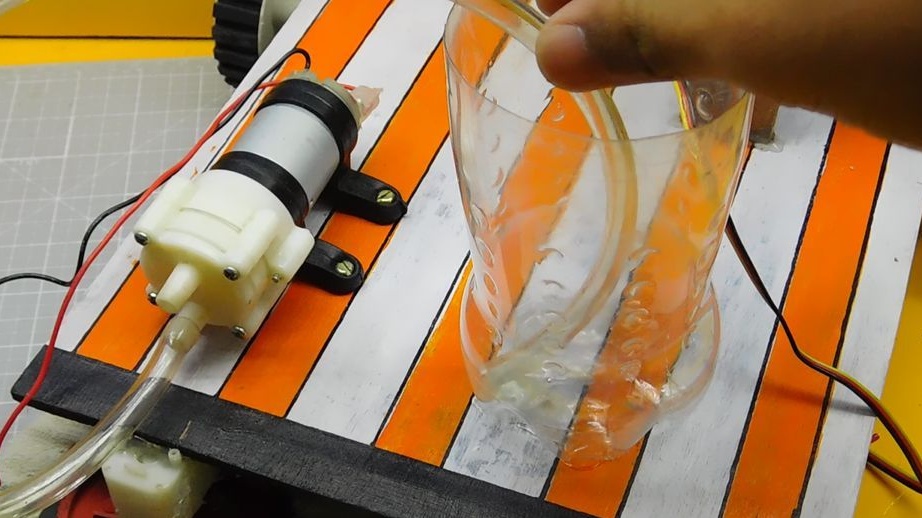
Bevestigt de pomp aan het platform. Snijdt de bovenkant van een plastic fles af. Bevestigt de fles aan het platform. Installeert een waterinlaatpijp. Later wordt de watertoevoerleiding naar de borstels bevestigd.




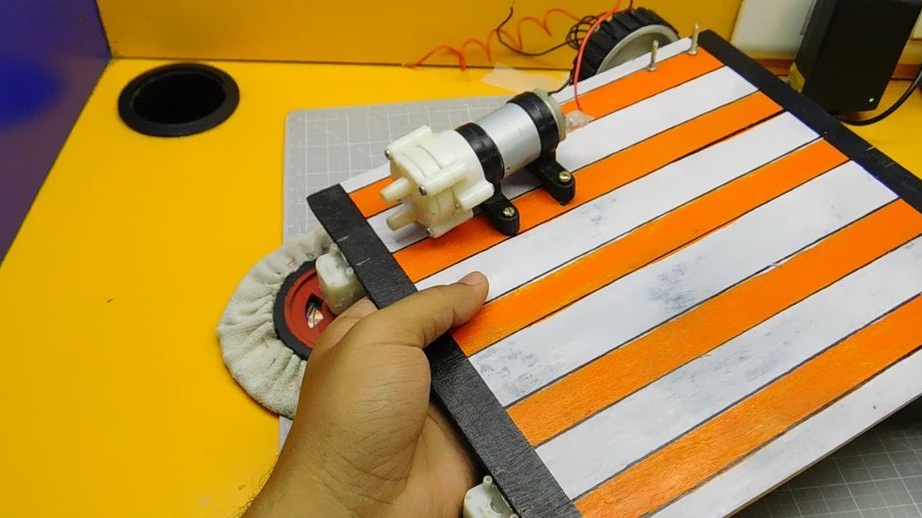




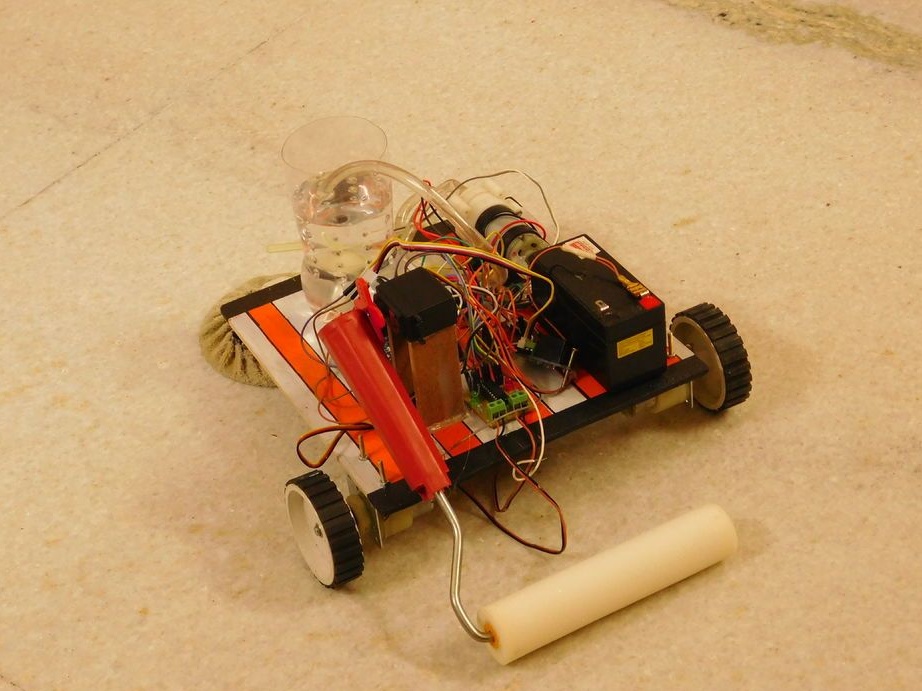
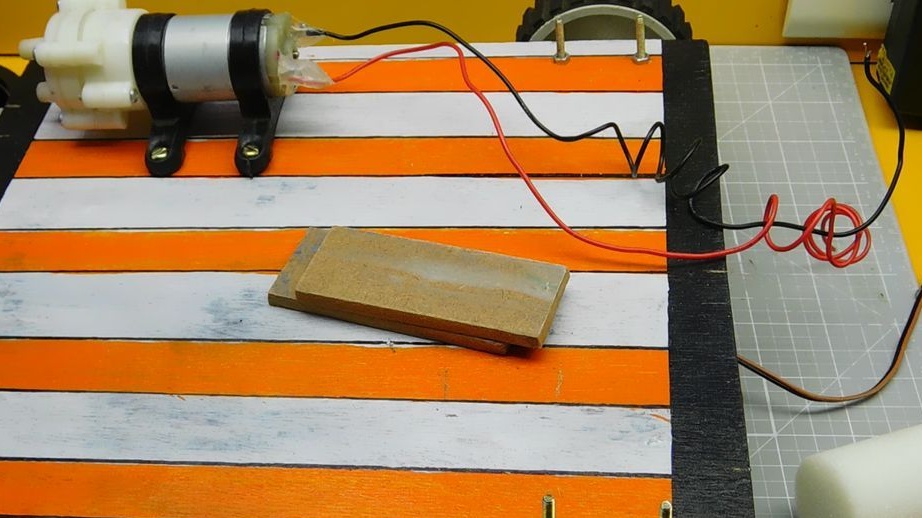
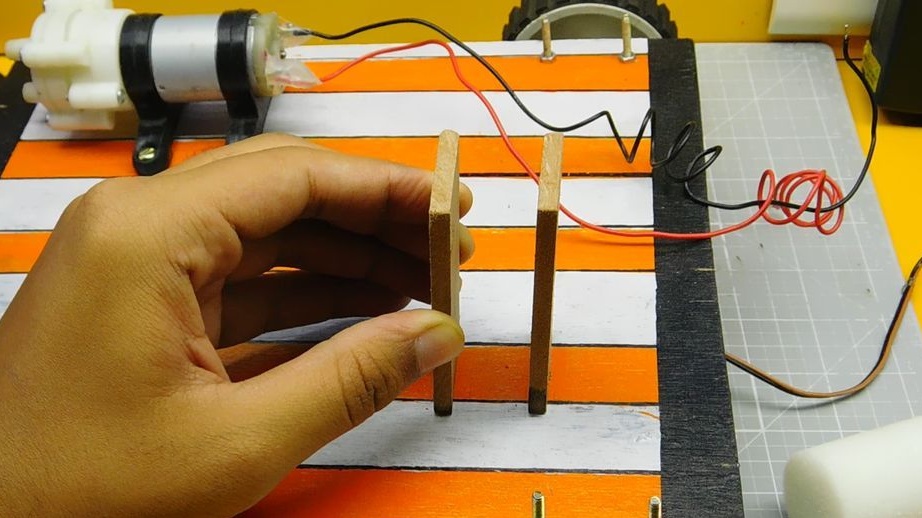
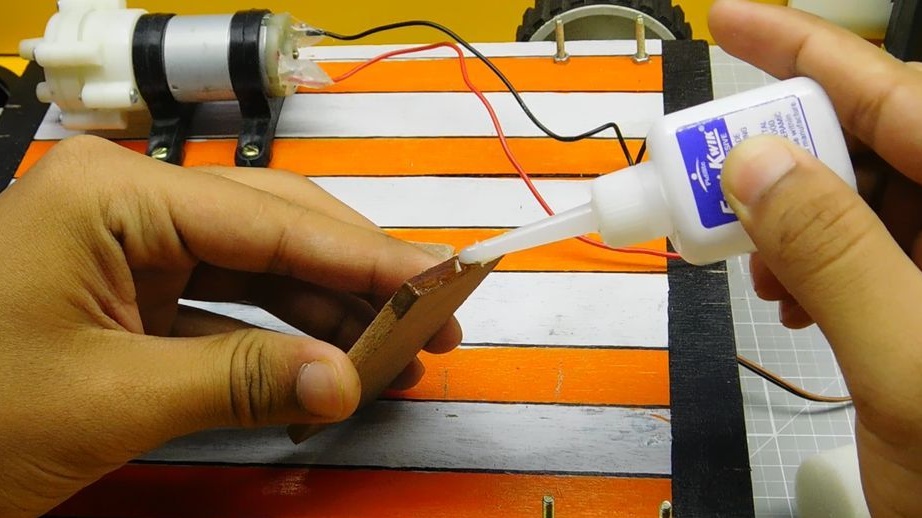
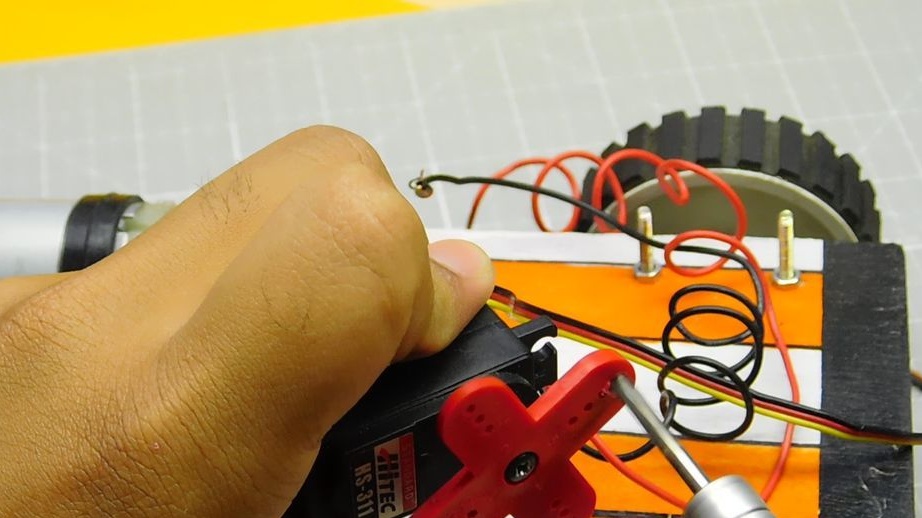
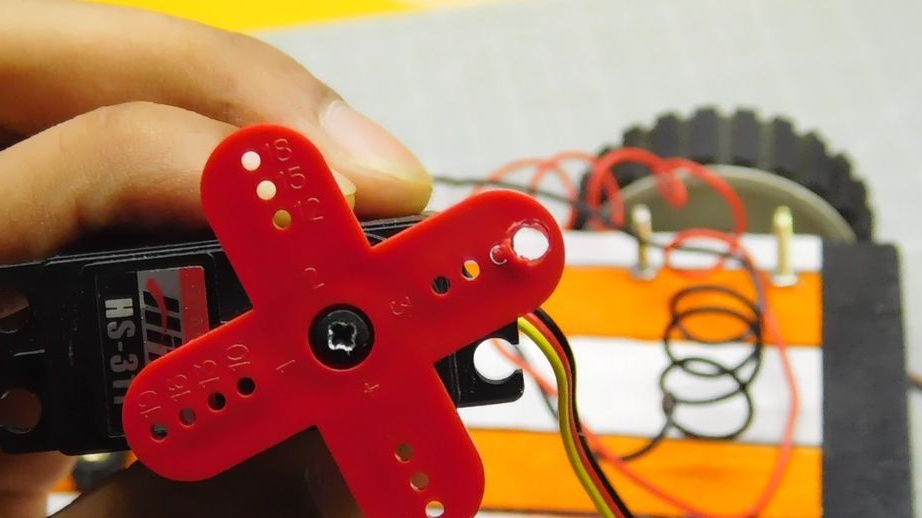
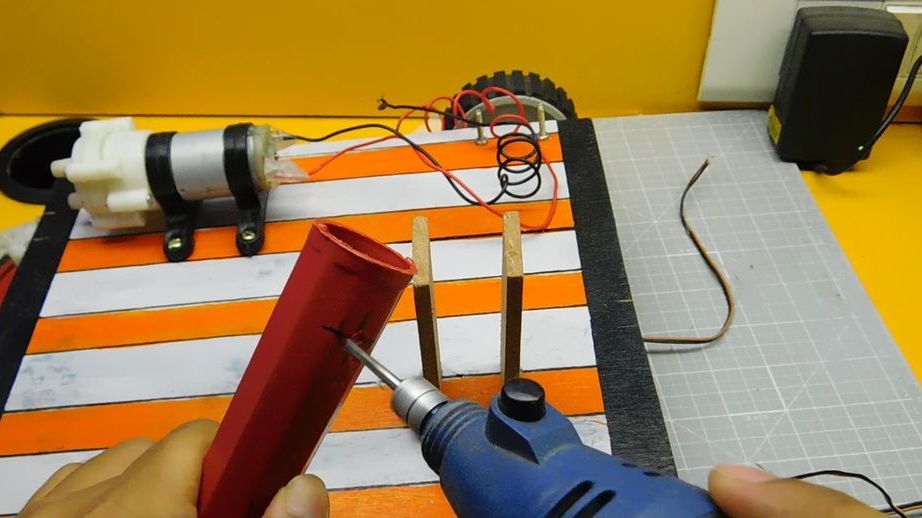
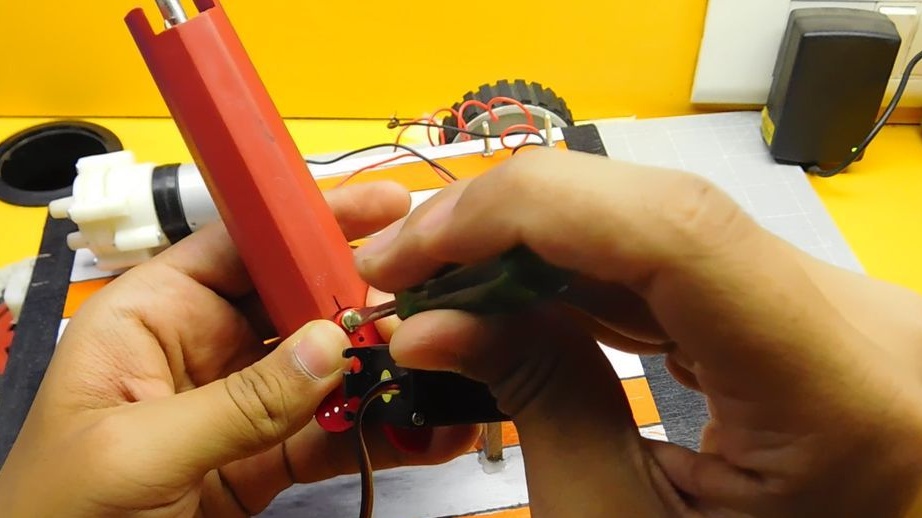
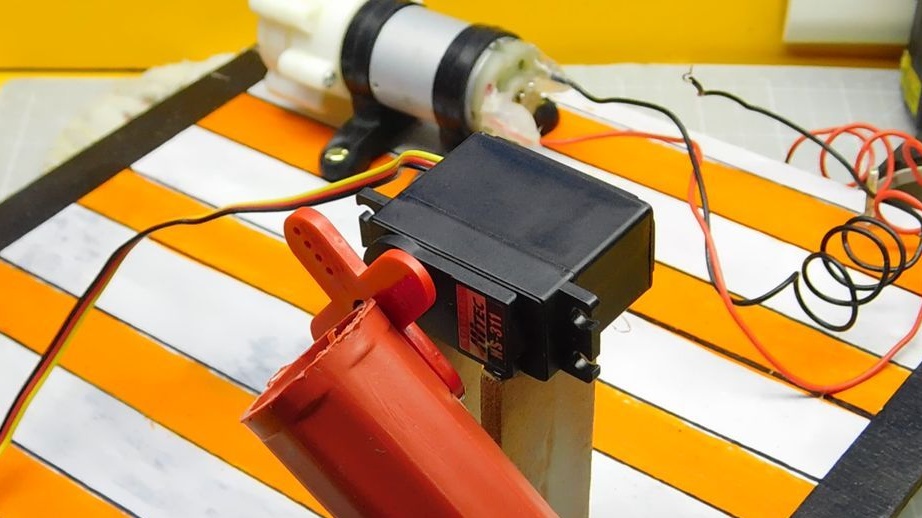
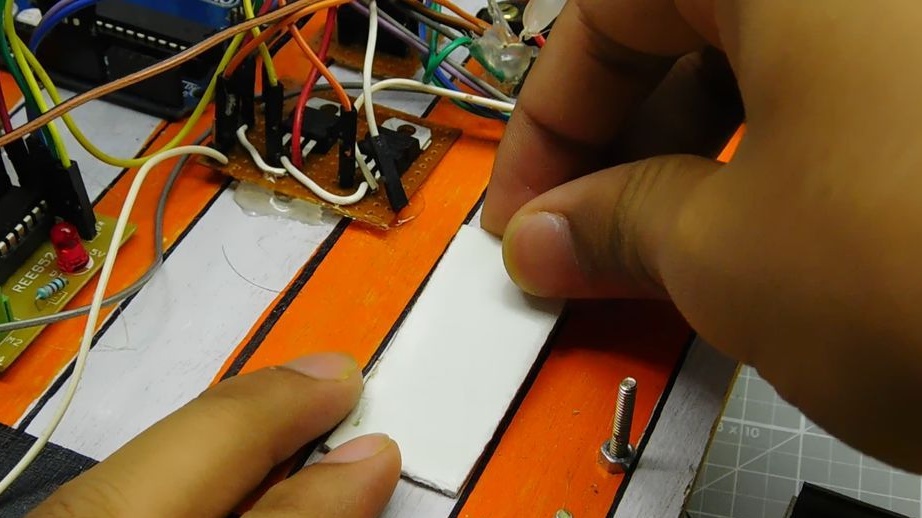
Stap drie: Roller Lift Mechanism
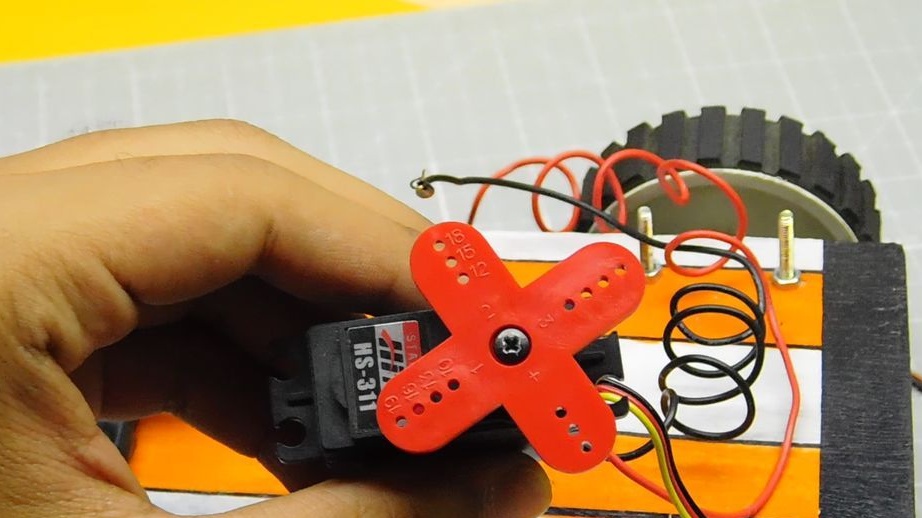
De rol van de rol is het verzamelen van fijn stof. Omdat de rol af en toe nodig is, besloot de meester om een mechanisme te maken om de rol omhoog en omlaag te brengen. Bevestigt twee lamellen parallel aan elkaar op het platform. Maakt twee gaten, één in de servohendel, de tweede in de handgreep van de rol. Schroeft de rolhendel aan de hendel. Bevestigt de servo aan de latten.


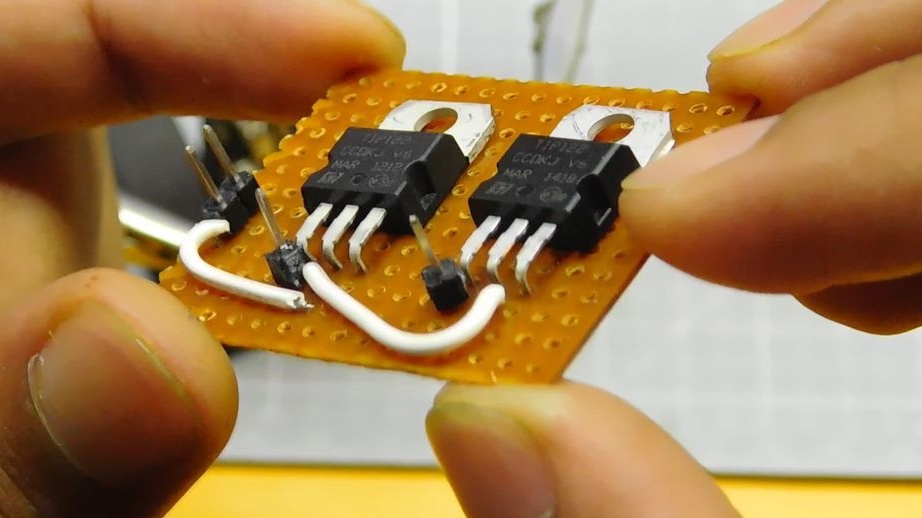
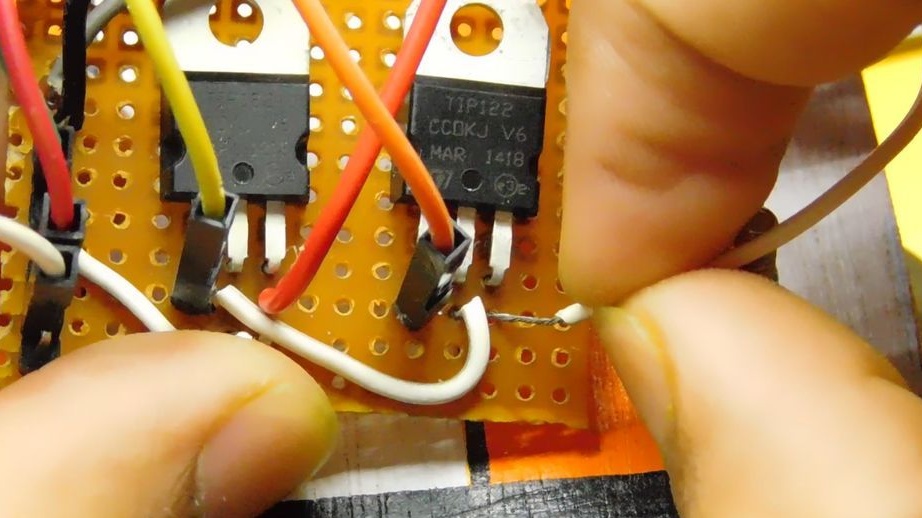
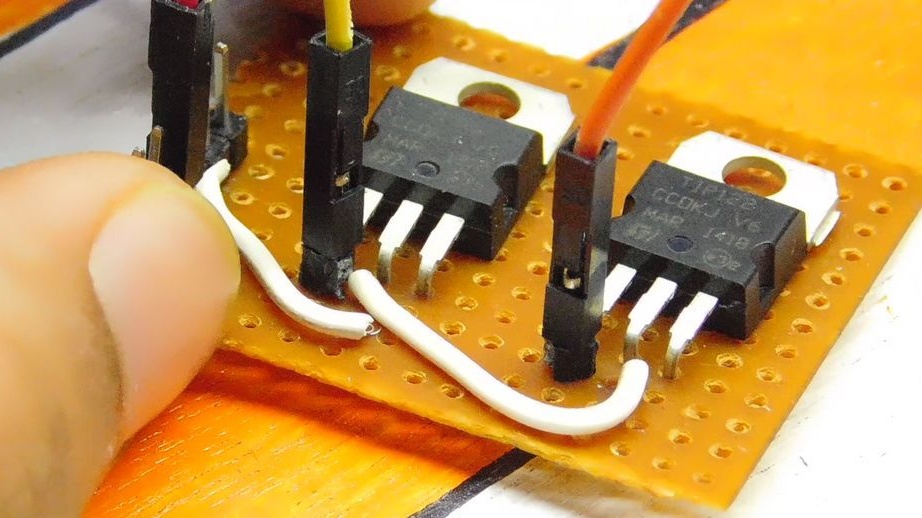
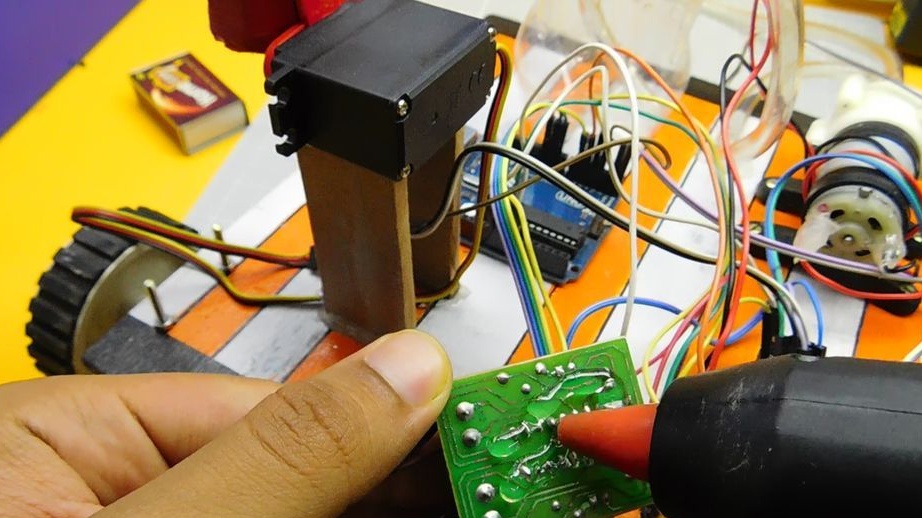
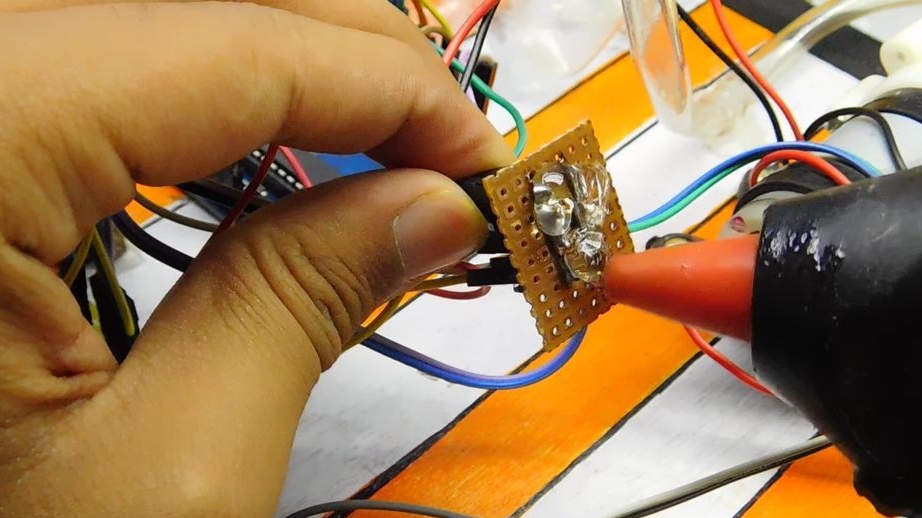
Stap vier: transistor
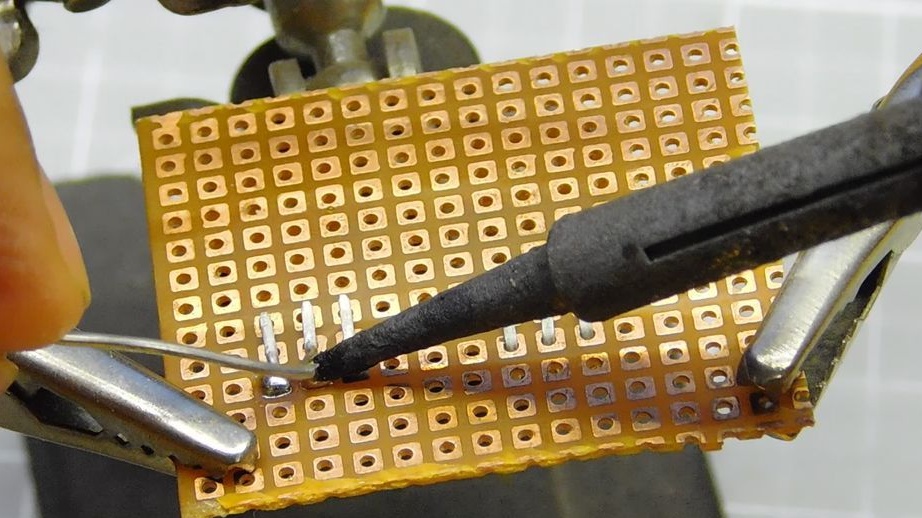
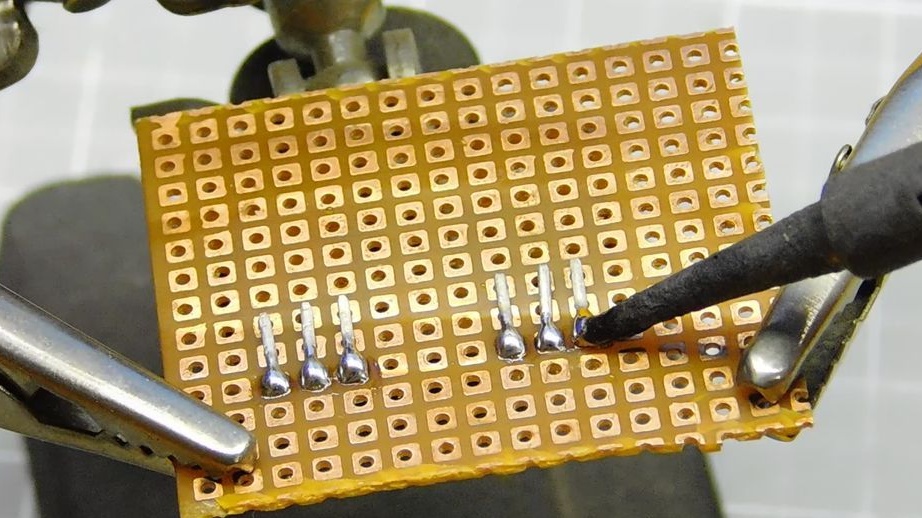
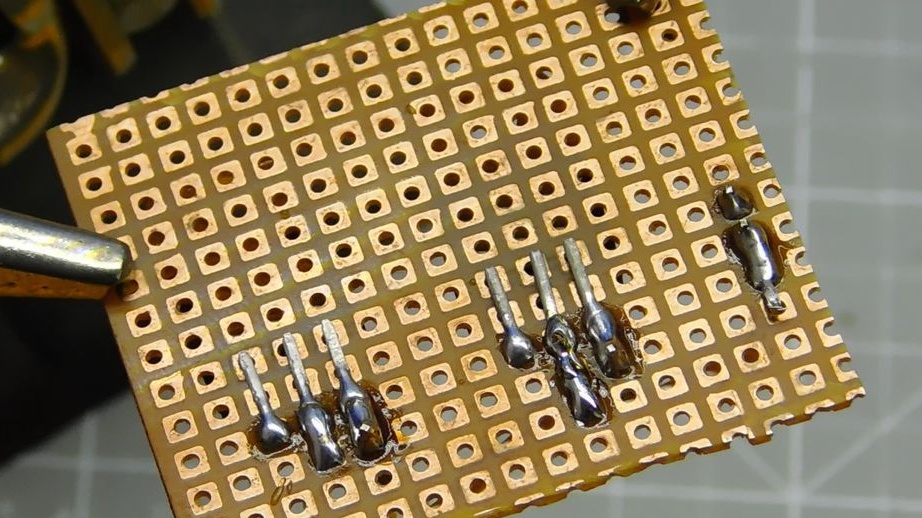
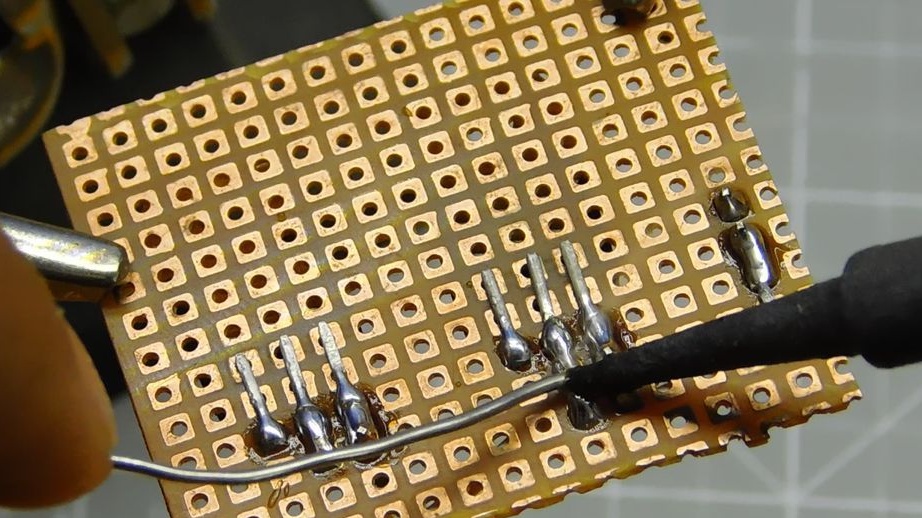
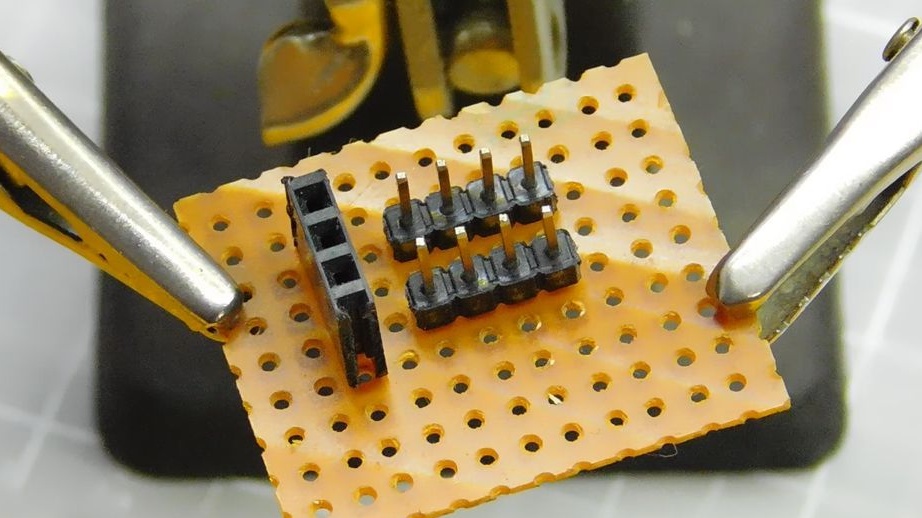
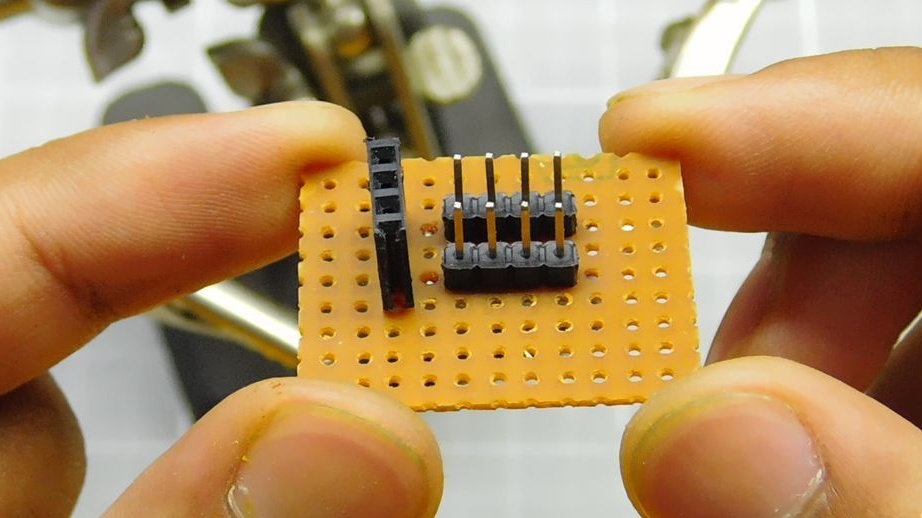
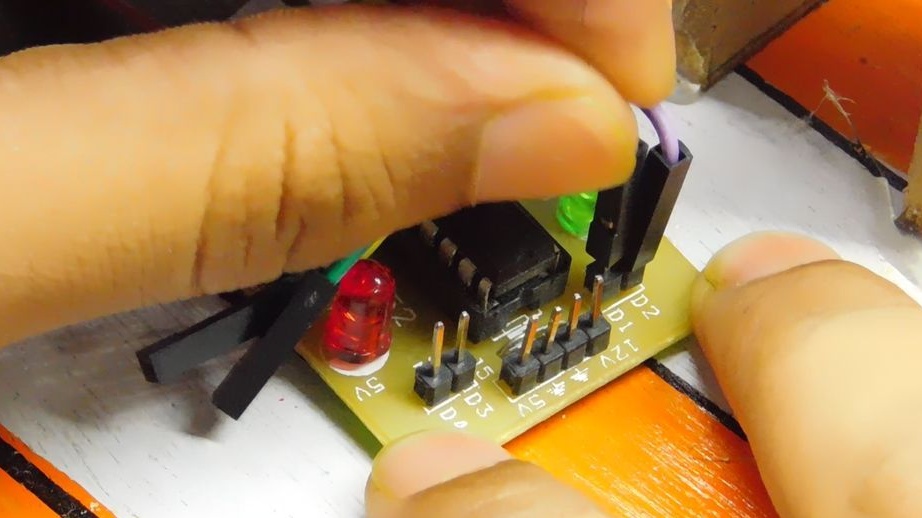
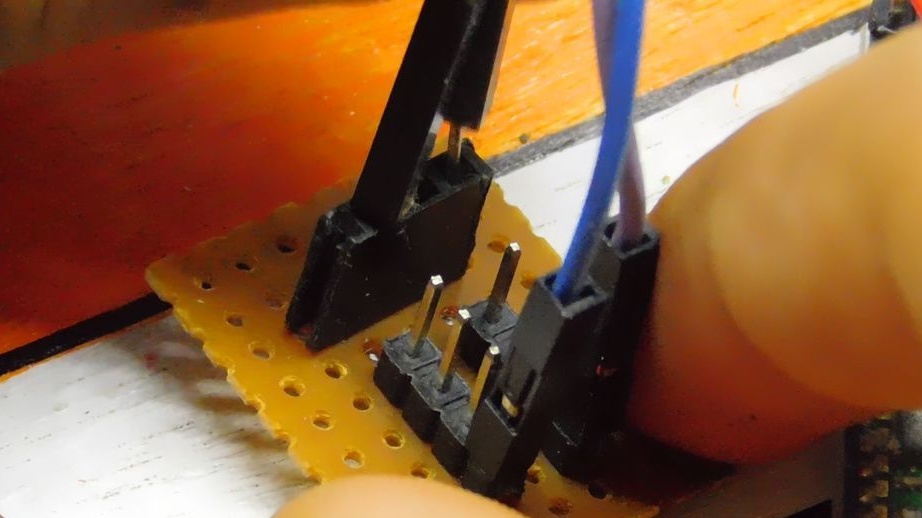
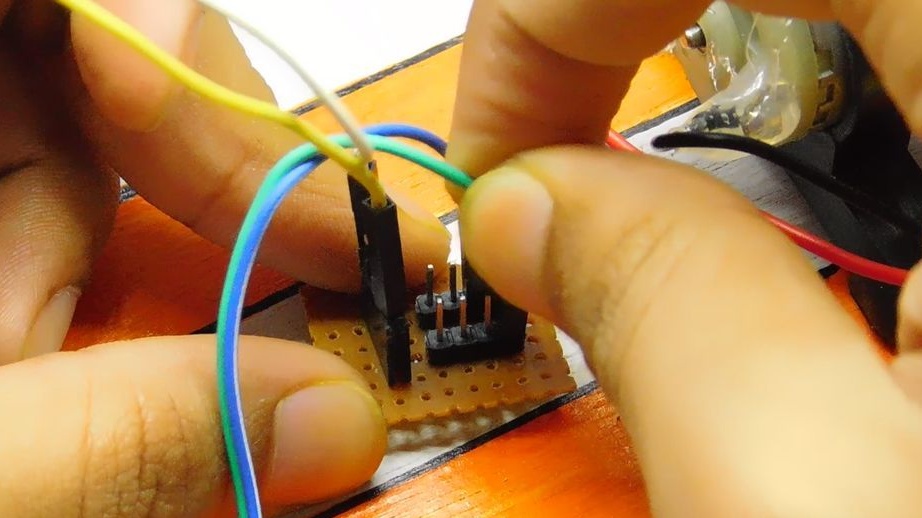
Voor een waterpomp en motoren is 12 V voeding nodig, maar aangezien Arduino slechts 5 V afgeeft, verzamelt de master het circuit op de TIP122 transistor.Ook voegt de wizard verschillende + 5V- en Gnd-pinnen toe aan de printplaat.
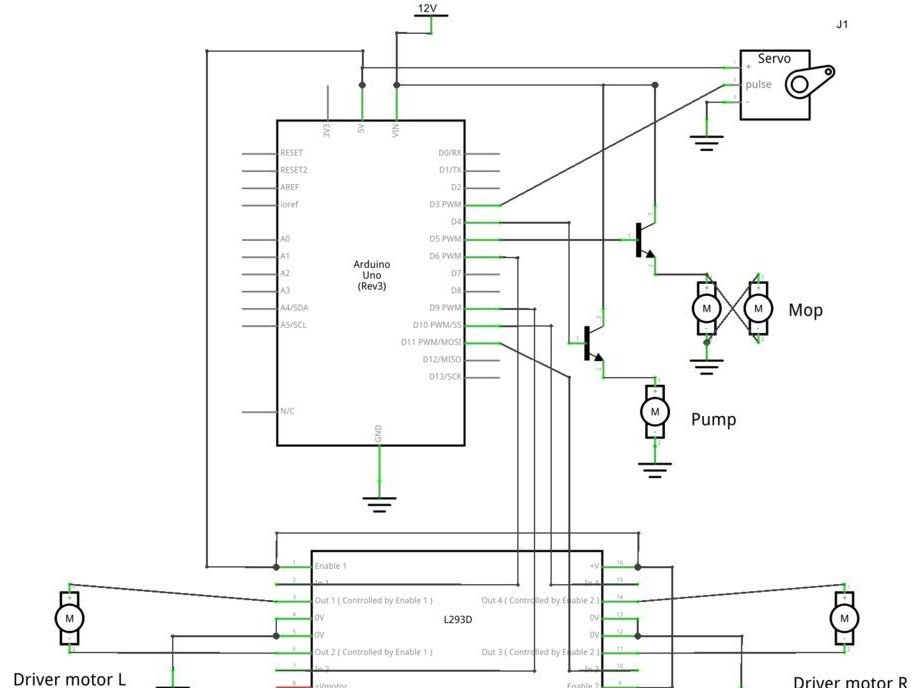
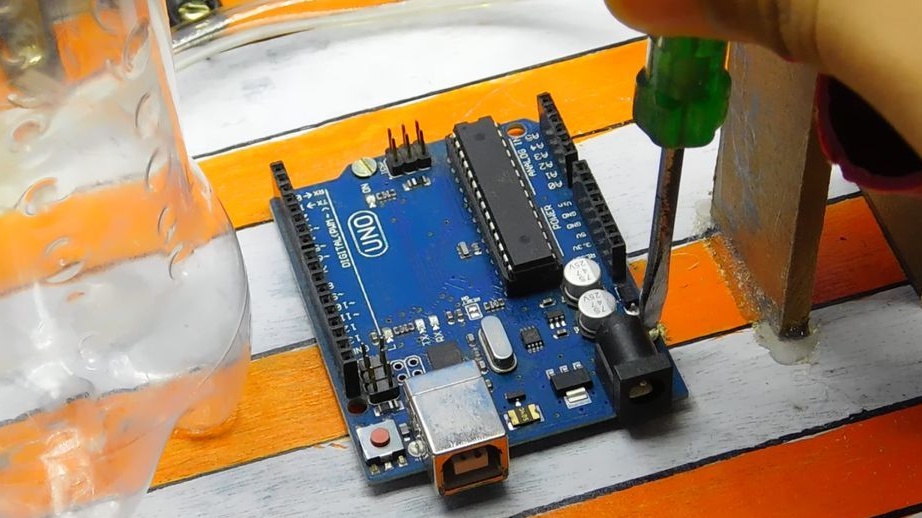
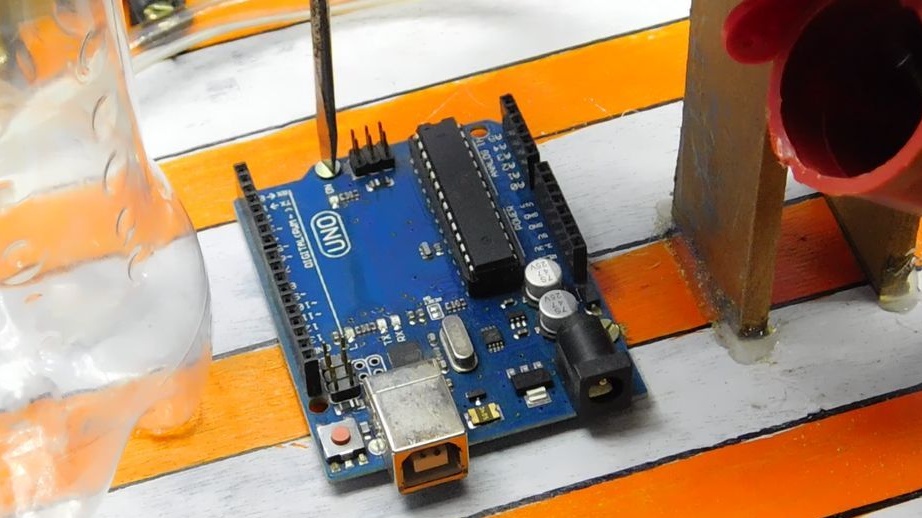
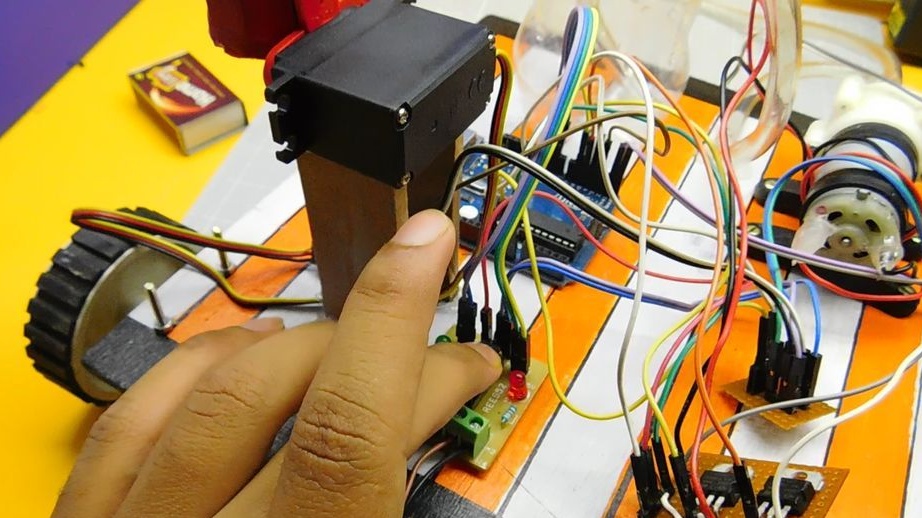
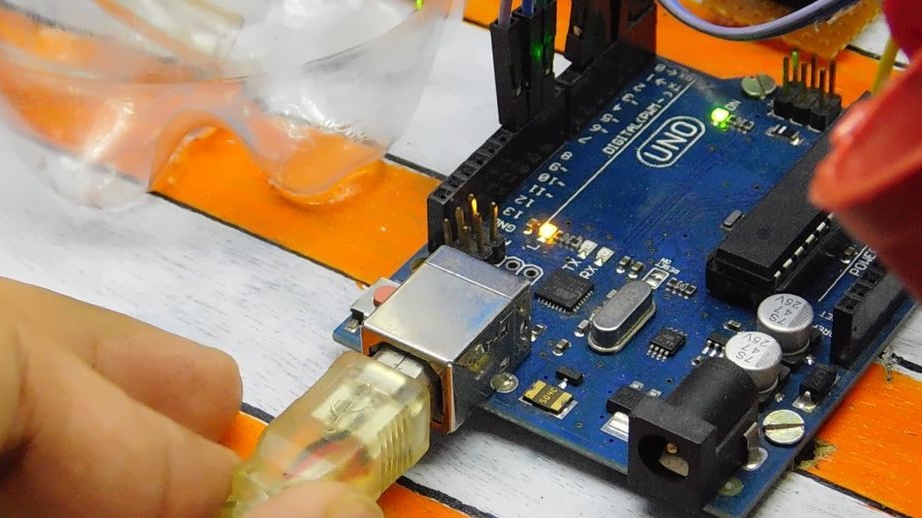
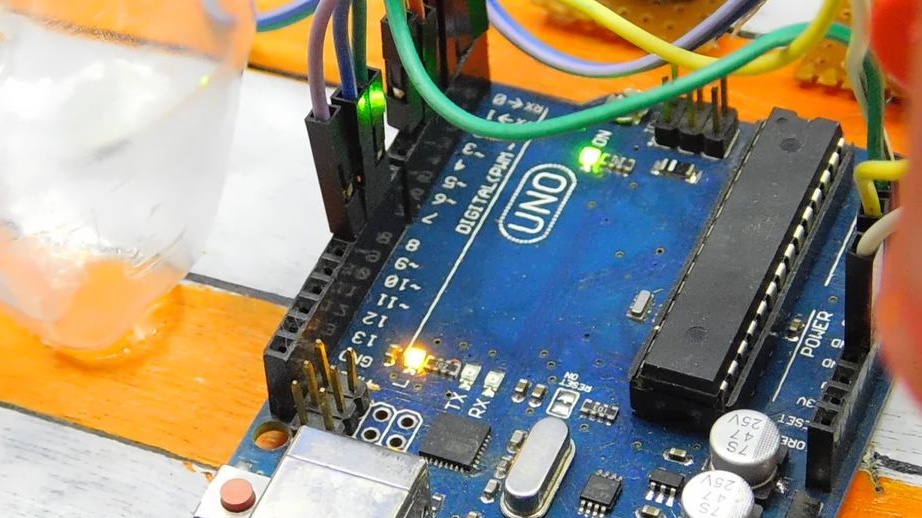
Stap vijf: het Arduino-circuit installeren
Bevestigt Arduino aan het platform en verbindt elektrische apparaten met het bord.
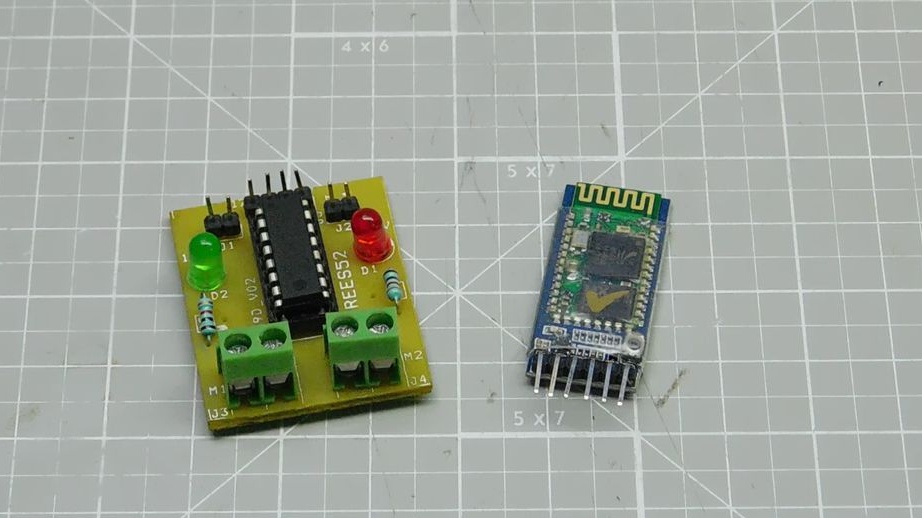
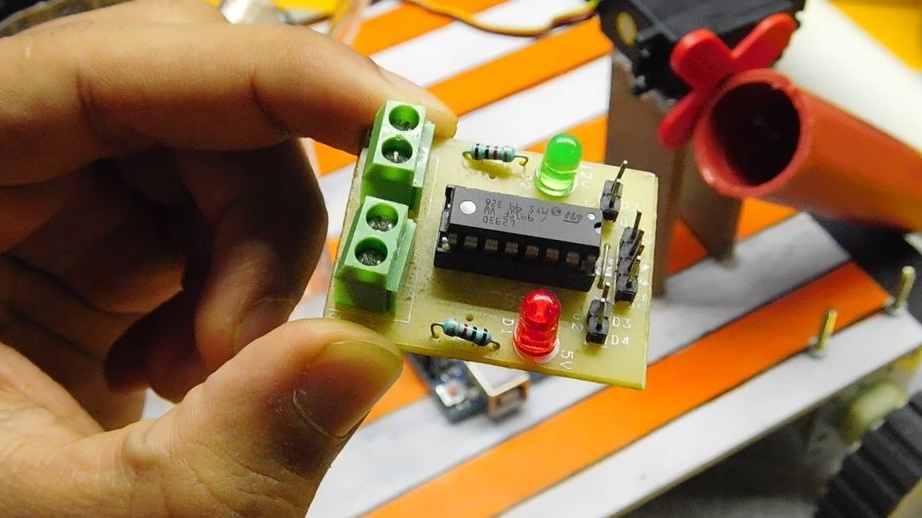
Motorregelmodule.
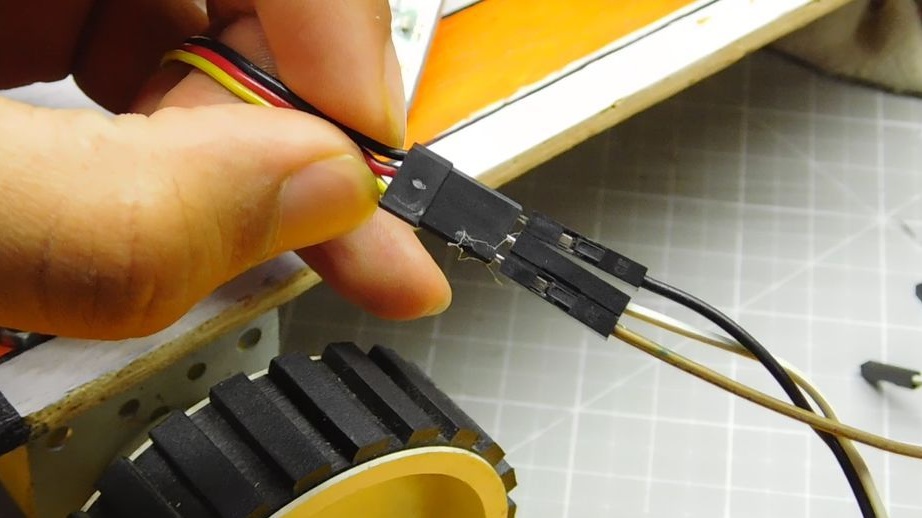
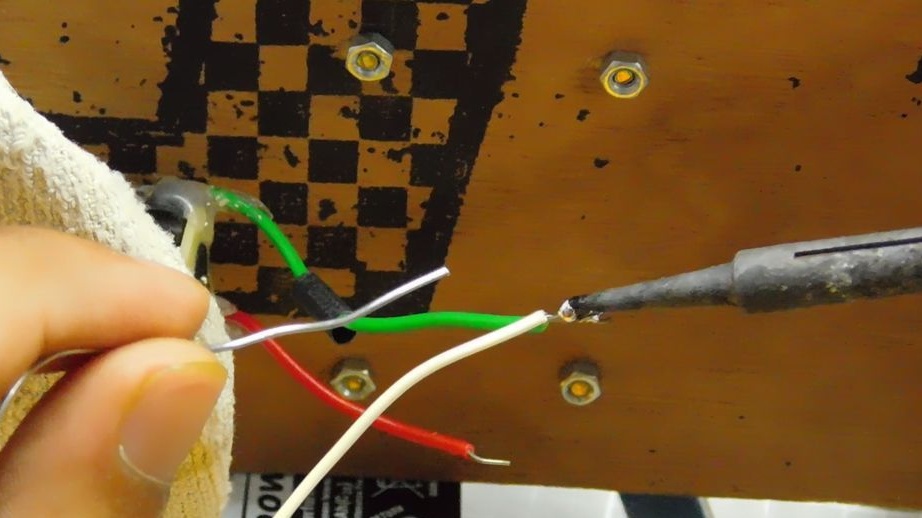
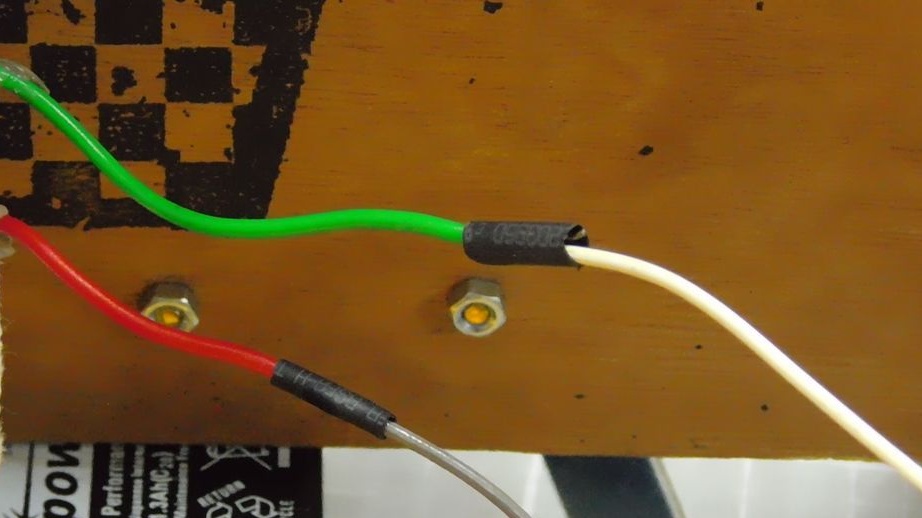
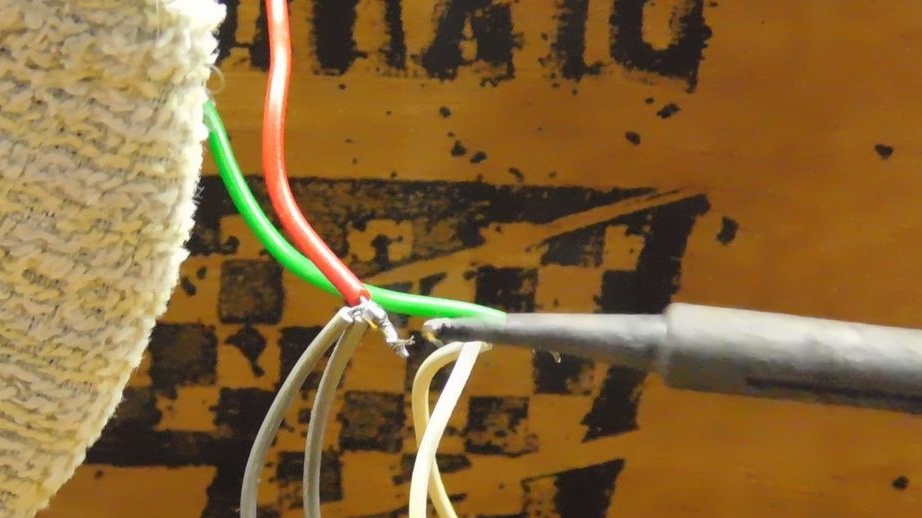
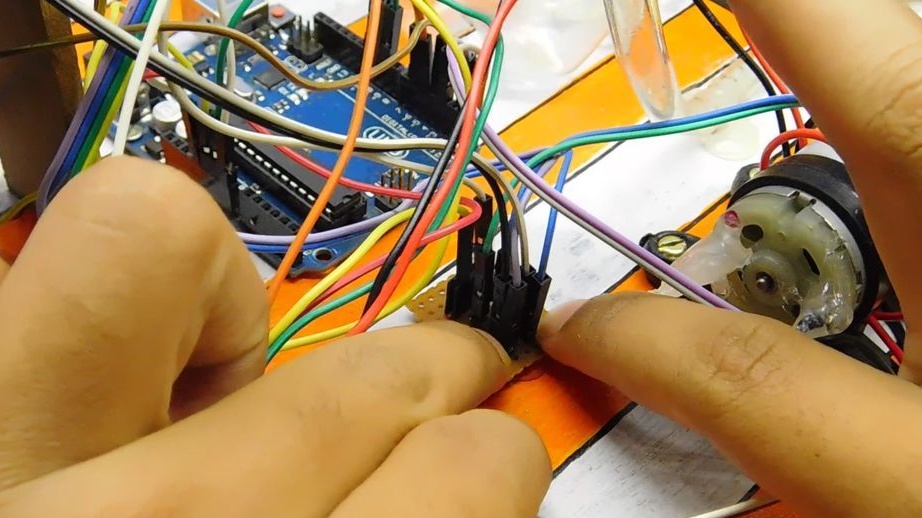
Het soldeert naar de motoren (waarop de wielen zijn bevestigd voor beweging, niet de borstels) draden. Bevestigt de draden in de montagebeugels van de module. Verbind vervolgens de module als volgt met Arduino.
Module ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5V - + 5V
Gnd-gnd
+ 12V-module wordt aangesloten op de batterij.
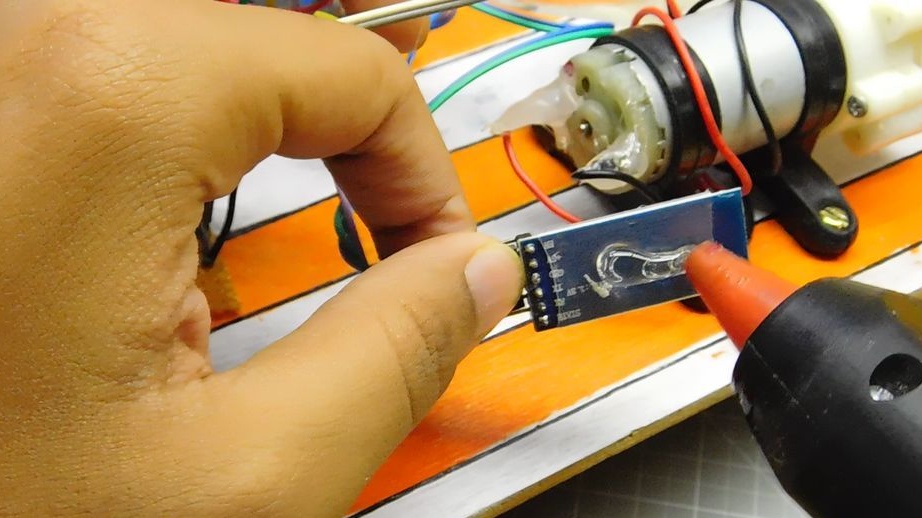
Bluetooth-verbinding.
Bluetooth ::: Arduino
Vcc - + 5V
Gnd - gnd
Rx - Tx
Tx - Rx
Servomotor ::: Arduino
Vcc - + 5V
Gnd - gnd
Signaal - D3
Vervolgens verbindt het de pomp- en borstelmotoren volgens het schema. Borstelmotoren zijn parallel geschakeld en draaien in verschillende richtingen, rechtsom en linksom.

Stap zes: Bevestigingsmiddelen voor robotonderdelen
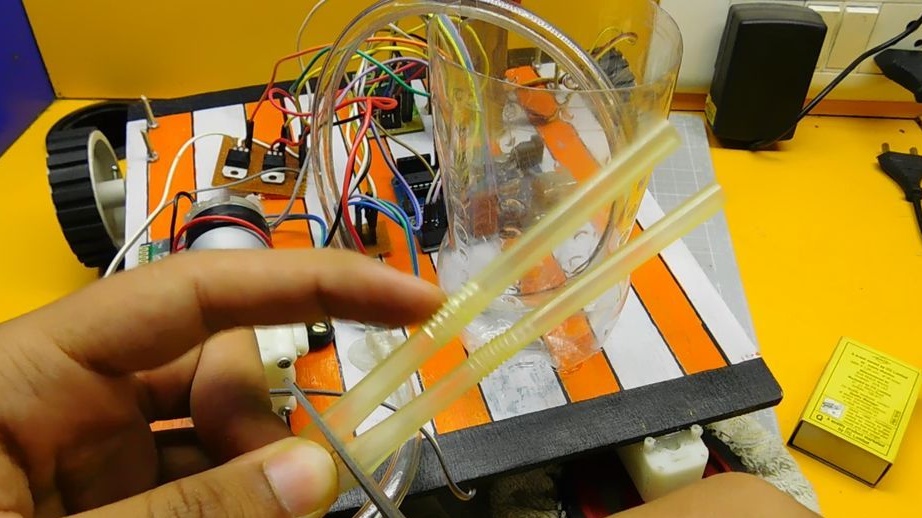
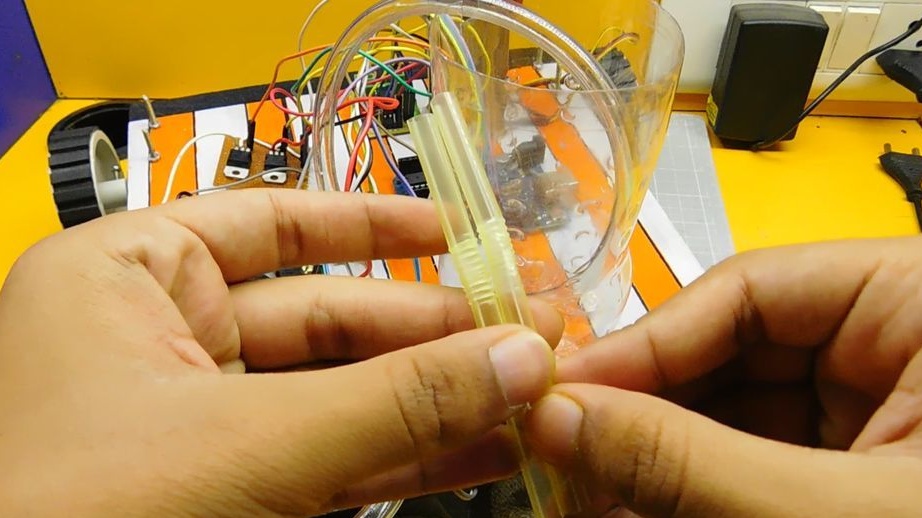
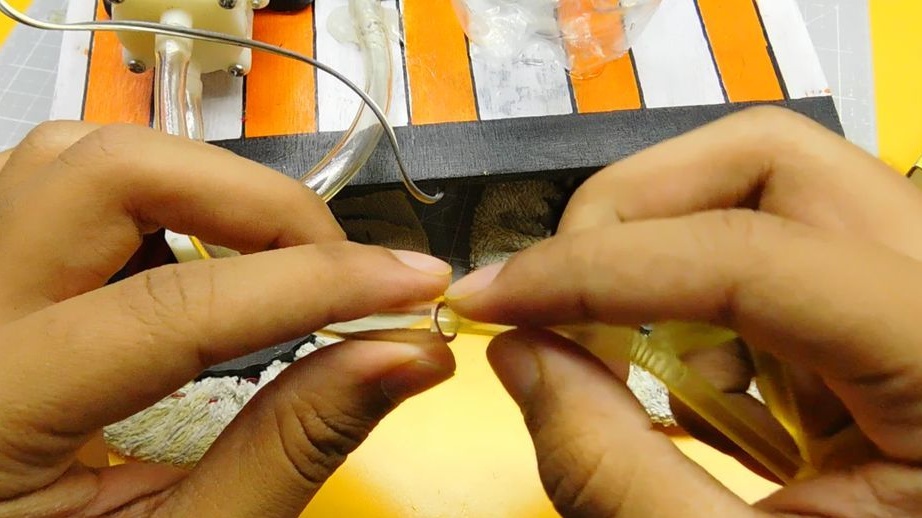
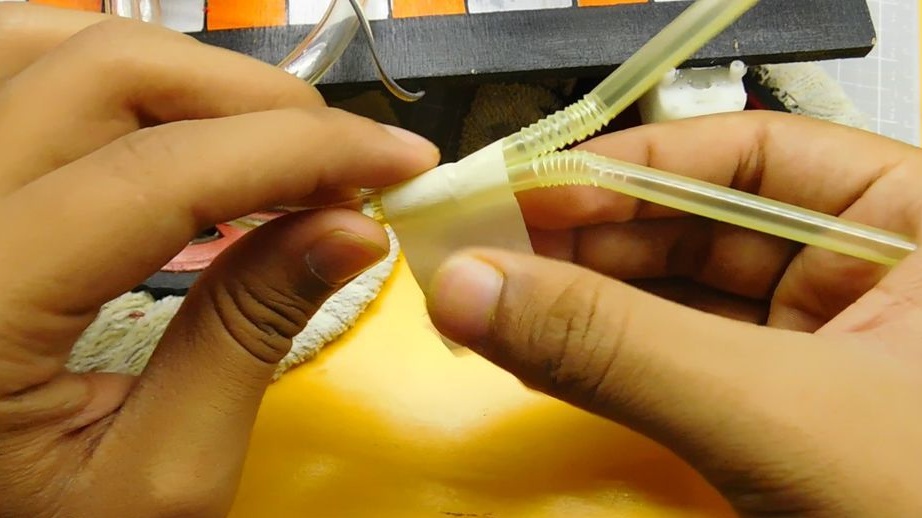
Snijdt twee cocktailrietjes van elk ongeveer 7 cm en steekt de rietjes in de watertoevoerleiding. Bevestigt rietjes voor borstels.




Sloten op het platform elektronisch componenten.

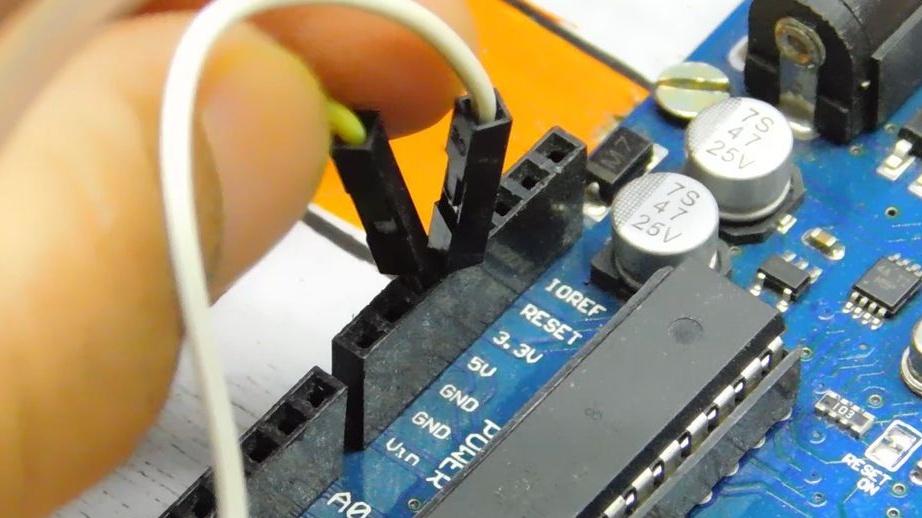
Stap zeven: download de code
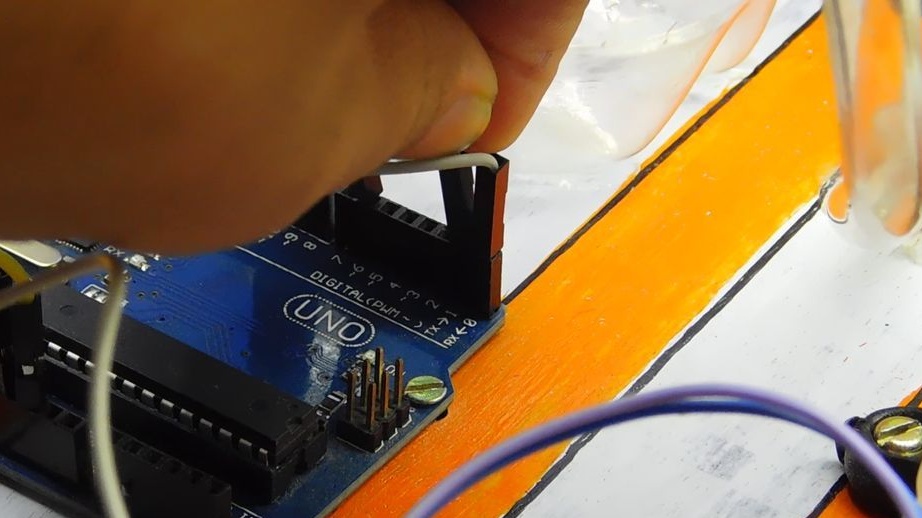
Verwijdert de Rx- en Tx-jumpers van het Arduino-bord. Verbindt het bord met een computer. Laadt de code. Zet jumpers op hun plaats. .
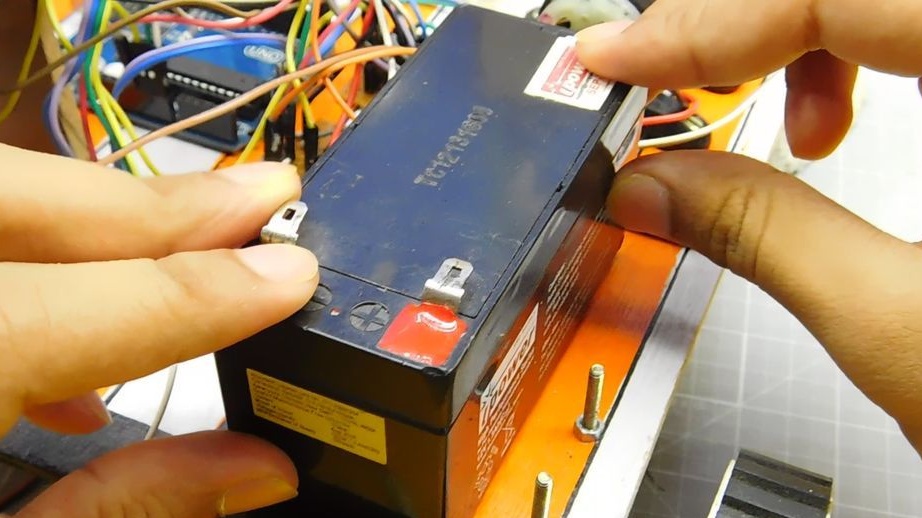
Stap acht: batterij
Beveiligt, met dubbelzijdige tape, de batterij op het platform. Verbindt elektronische apparaten met de batterij. Arduino-master adviseert om verbinding te maken via een spanningsdeler. Je kunt ook een schakelaar aan het circuit toevoegen.

Stap negen: bestuur de robot
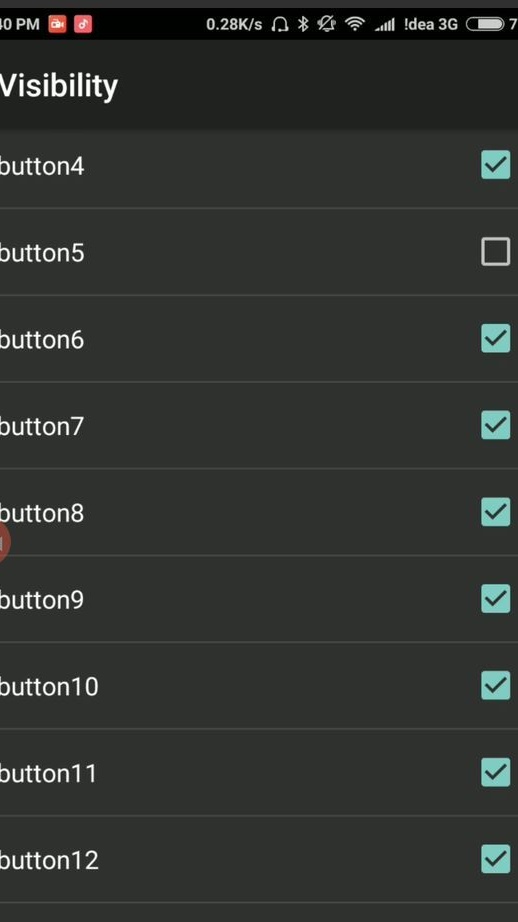
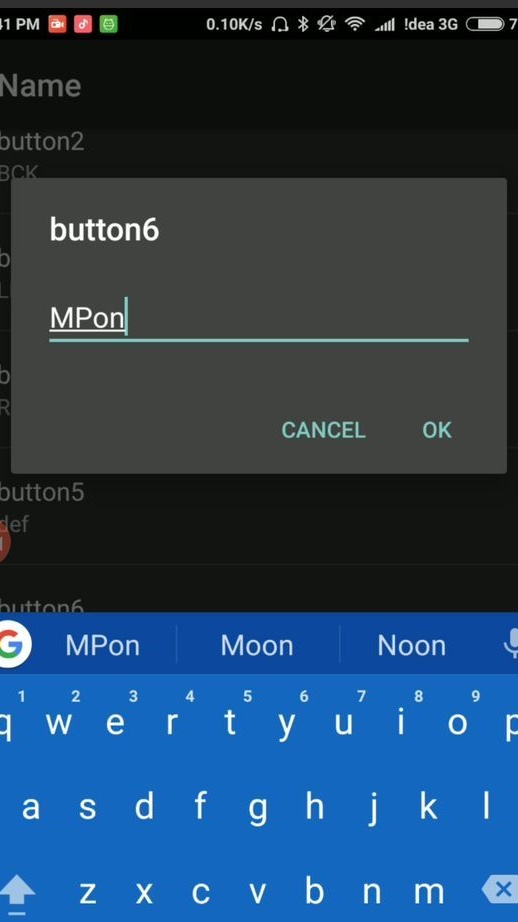
Via Google Play downloadt de wizard de applicatie 'Bluetooth Serial Controller'. Opent de applicatie. Gaat naar instellingen> zichtbaarheid. Schakelt knoppen 5, 9, 12 uit. Gaat naar namen. Wijst aan elke knop een naam van 2-3 letters toe. Zie onderstaande foto.
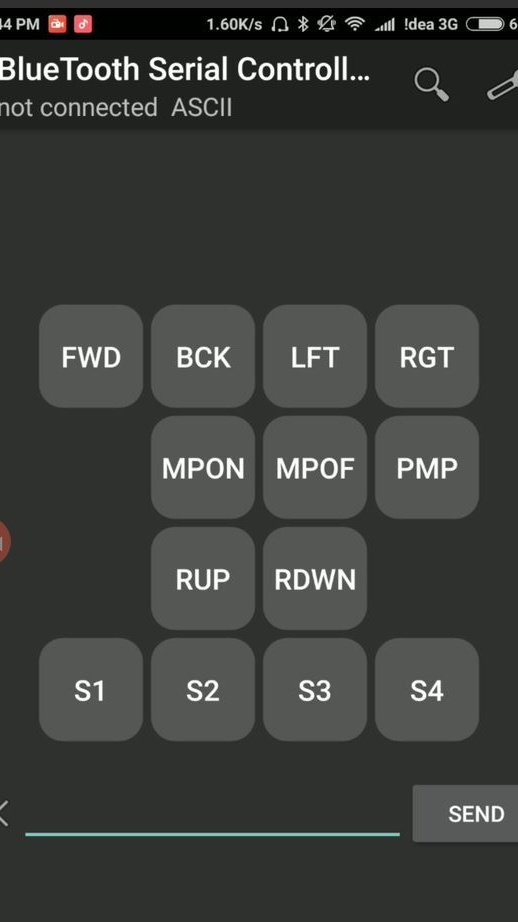
Vervolgens installeert elke knop een opdracht (aanhalingstekens moeten worden verwijderd, verander de hoofdletter niet):
Knop 1 (FWD): 'F'
Knop 2 (BCK): 'B'
Knop 3 (LFT): 'L'
Knop 4 (RGT): 'R'
Knop 6 (MPON): 'M'
Knop 7 (MPOF): 'm'
Knop 8 (PMP): 'P'
Knop 10 (RUP): 'U'
Knop 11 (RDWN): 'u'
Knop 13 (S1): '1'
Knop 14 (S2): '2'
Knop 15 (S3): '3'
Knop 16 (S4): '4'
Wijst in stopopdrachten> opdrachten alleen opdrachten toe aan deze knoppen:
Knop 1: 'S'
Knop 2: 'S'
Knop 3: 'S'
Knop 4: 'S'
Knop 8: 'p'

Nu blijft het om verbinding te maken met de bluetooth-module ("HC-05"), voer het wachtwoord in (1234 of 0000) en je kunt proberen de kamer schoon te maken -)))
Met dank aan de master-master, en we willen dat hij de robot verbetert en er volledig autonoom werk uit haalt.
Het hele montageproces van de robotstofzuiger is te zien in de video.