


Ik heb een deel van mijn ontwerp overgenomen uit de montage-instructies voor Lego Technic 42049 en Lego Technic 42041. De rest is mijn improvisatie. Voor controle gebruik ik de Bluetooth-module die is gekoppeld aan het Android-apparaat of de computer. We hebben dus nodig:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- L9110S-motorbestuurder
- 1 servo-aandrijving SG-90
- Bluetooth-module HC-05 of gelijkwaardig
- USB-UART voor Arduino-firmware
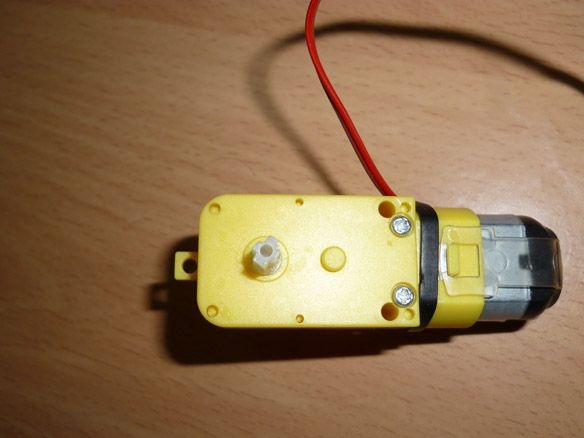
- Motorreductor 6v 1: 150 100 tpm
- 2 leds
- 2 weerstanden 150 ohm
- Condensator 10v 1000uF
- 2 kammen met één rij PLS-40
- Inductor 68mkGn
- 6 NI-Mn 1.2v 1000mA-batterijen
- Connector vader-moeder twee pin naar draad
- Homutik
- Draden van verschillende kleuren
- soldeer
- Hars
- soldeerbout
- Bouten 3x20, moeren en ringen voor hen
- Bouten 3x40
- Bouten 3x60
Stap 1 Montage achteras
Vooruit - achteruit wordt uitgevoerd door een reductiemotor met een 6V-motor, een overbrengingsverhouding van 1: 150 en een stationair toerental van 100 tpm. Je kunt een andere overbrengingsverhouding proberen, maar naar mijn mening is dit optimaal. De versnellingsbakas aan beide zijden moet in de vorm van een kruis worden ingesneden en legodetails worden aangebracht:
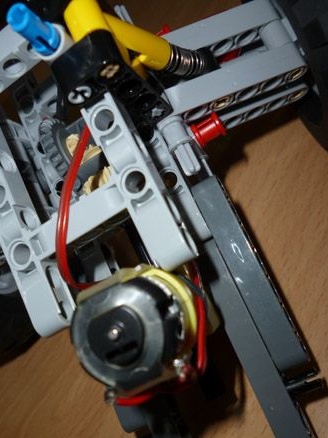
Vervolgens verzamelen we de basis van de achteras volgens de instructies van Lego 42029 deel 1, beginnend vanaf 3 pagina's tot en met 8. En voeg een paar details toe zodat u de motor en versnellingsbak kunt installeren.
Bekijk online bestand:
Bekijk online bestand:



Stap 2 Montage van de vooras
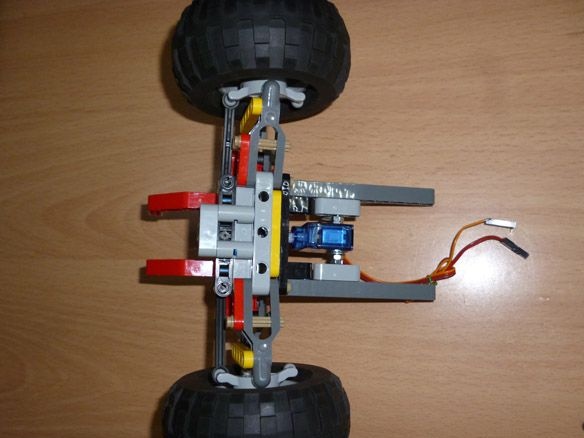
We monteren het voorste deel van de ophanging volgens de instructies van Lego 42029 deel 1, van pagina 21 tot en met 23. We nemen de trapezium van het tweede deel van Lego van pagina 6 tot en met 11. Servo SG-90 is zeer geschikt voor het draaien van de wielen. Om het op ons model te bevestigen, is het noodzakelijk om voorzichtig te boren, om de interne delen van de servo niet aan te raken, een doorgaand gat met een diameter van 3,2 mm of gewoon te snijden met een briefpapiermes. En snij ook de uitstekende delen af (“vleugels” voor bevestiging). We steken een bout in het gemaakte gat en bevestigen het met moeren. Op de servo-as zetten we een hendel met een geschroefd deel van lego:





Stap 3 Montage van de basis en cabine
We verbinden beide bruggen zoals weergegeven op de foto:
We monteren de cabine volgens de instructies van Lego 42041. Vanaf pagina 39 tot 47 van het eerste deel. Verder van pagina 5 tot 28 van het tweede deel. Evenals de bumper op pagina's 38 tot 43 van het tweede deel van de instructies.
Bekijk online bestand:
Bekijk online bestand:


Bekijk online bestand:
Bekijk online bestand:
Stap 4 Electrics
Voor de bediening gebruiken we de Arduino Pro Mini en de Bluetooth-module. De Pro Mini kan worden vervangen door elk ander Arduino-bord. Ik koos voor de Pro Mini, dus het is de kleinste. De motor driver is nodig om de motor aan te sluiten.
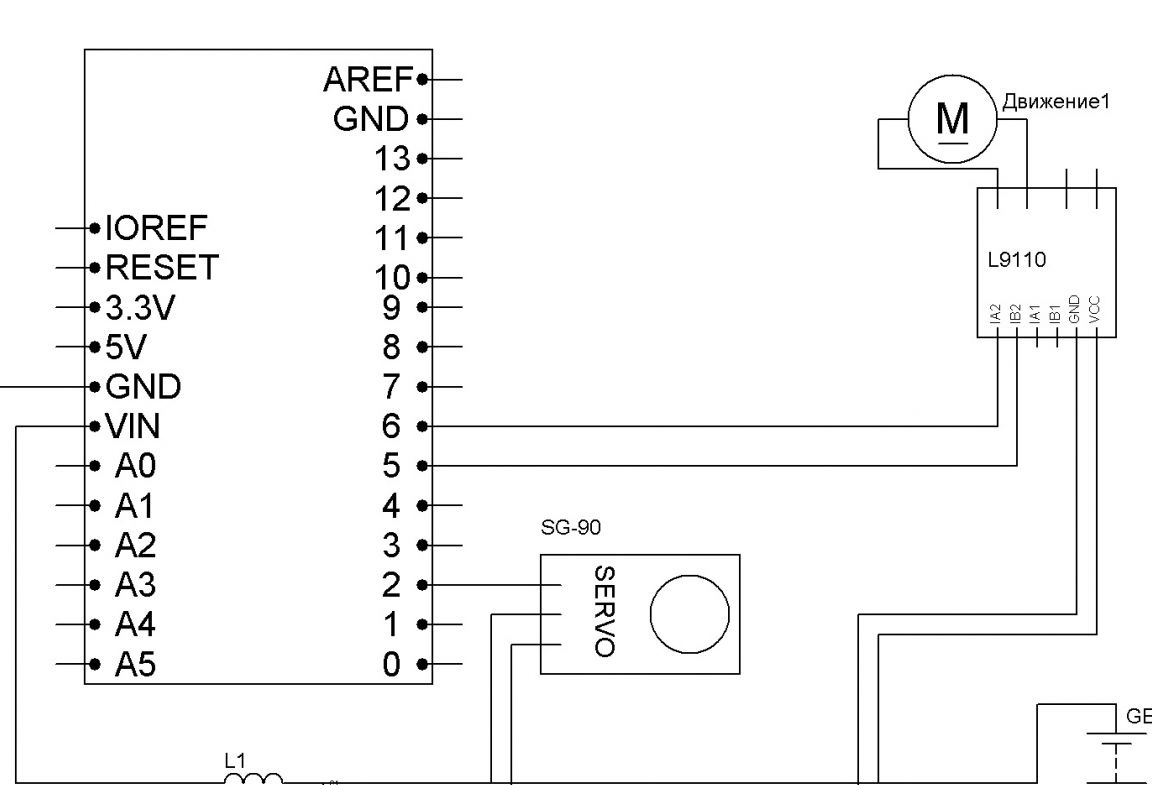
Verbinding van alle componenten met Dupont moeder-tot-moeder draden. Voeding - 6 NI-Mn 1,2v 1000mA-batterijen in serie geschakeld. Een condensator van elk laag vermogen, een inductor die je ook zult vinden, je moet het vermogen van de microcontroller stabiliseren. De anodes van de twee leds zijn aangesloten op 4 pin arduino, de kathodes op GND. Weerstanden zijn geselecteerd voor de gebruikte LED's. Rol de batterijen voor het gemak op met tape.

We lijmen het allemaal op een dubbelzijdige tape op basis van:
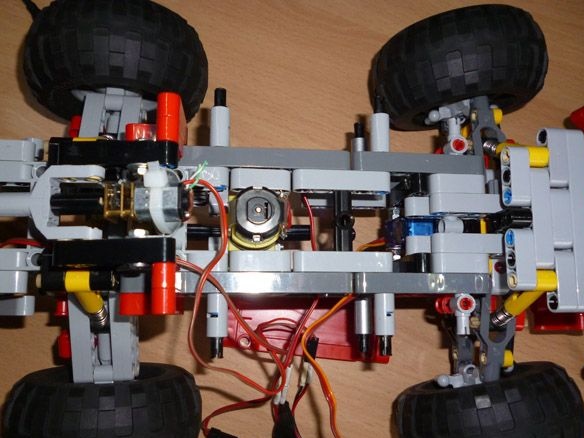
We plaatsen onze elektricien tussen de wielen en sluiten:
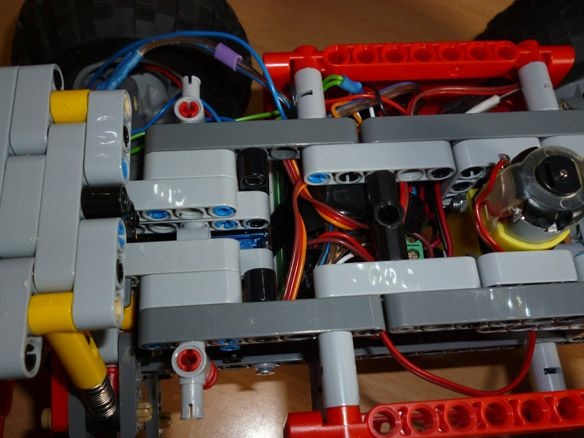
Voeg een paar slagen toe:


Stap 5 Bluetooth-configuratie
De meest betaalbare Bluetooth-modules van dit moment zijn de HC-05 en HC-06. Ze zijn er in overvloed in Chinese online winkels. De verschillen tussen beide zijn dat de eerste zowel in master-modus (slave) als in slave-modus (master) kan werken. De tweede is een puur slave-apparaat. Met andere woorden, HC-06 kan een gekoppeld apparaat niet detecteren en er geen verbinding mee maken, het kan alleen de master gehoorzamen.
Korte kenmerken van de modules:
- Bluetooth-chip - BC417143 vervaardigd door
- communicatieprotocol - Bluetooth-specificatie v2.0 + EDR;
- actieradius - tot 10 meter (vermogensniveau 2);
- Compatibel met alle Bluetooth-adapters die SPP ondersteunen;
- De hoeveelheid flash-geheugen (voor het opslaan van firmware en instellingen) - 8 Mbit;
- de frequentie van het radiosignaal - 2,40 .. 2,48 GHz;
- hostinterface - USB 1.1 / 2.0 of UART;
- stroomverbruik - de stroom tijdens communicatie is 30-40 mA. De gemiddelde stroomwaarde is ongeveer 25 mA. Nadat de verbinding tot stand is gebracht, is de opgenomen stroom 8 mA Er is geen slaapmodus.
Meestal worden modules verkocht als twee aan elkaar gesoldeerde platen. De kleinere is een fabrieksmodule, die veel wordt gebruikt in verschillende elektronisch apparaten. Groot - een speciale breadboard voor doe-het-zelf.
Zo zien de HC-05 en HC-06 DIY-modules eruit:
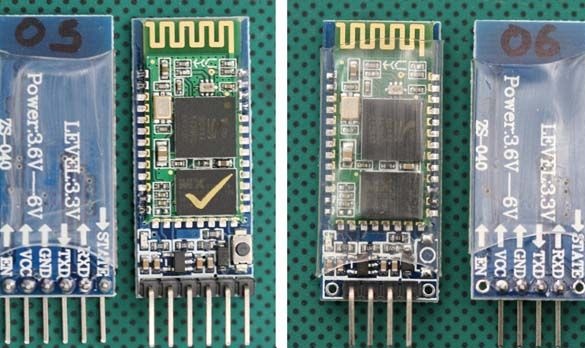
In principe kunt u elke gewenste module gebruiken. Een module zonder breadboard kost minder, maar dan moet je wel zorgen voor de 3.3 V voeding voor de module en jezelf kwellen door draden aan de module te solderen. Ik koos voor het optimale, naar mijn mening, in de prijs / functionele verhouding HC-06.
We verbinden als volgt:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Voor een goede werking moet de module worden geconfigureerd. We zullen AT-opdrachten configureren die in het terminalvenster zijn ingevoerd. Ik geef een voorbeeld van het opzetten van de HC-05 module. Als u een andere instelling heeft, kan dit afwijken. Om ervoor te zorgen dat onze module opdrachten ontvangt, flashen we eerst de Arduino met de volgende firmware:
In dit geval fungeert Arduino als een brug tussen computers en de module. In de firmware gebruik ik de SoftwareSerial-bibliotheek. Bij hoge snelheden werkt het onstabiel. Als u een hoge snelheid wilt, kunt u de module rechtstreeks aansluiten op de Arduino RX- en TX-contacten en de firmware herschrijven. Maar in mijn geval werken we met de module met een snelheid van 9600. Dus na de firmware, open de terminal en voer in:
"AT" (zonder aanhalingstekens) het antwoord "OK" zou moeten komen (het betekent dat alles correct is aangesloten en de module werkt)
"AT + BAUD96000" (zonder de aanhalingstekens) het antwoord "OK9600" zou moeten komen.
Als je het juiste antwoord hebt, ga dan naar de volgende stap.
Stap 7 Firmware
Om de firmware en de firmware zelf te schrijven, gebruik ik de Arduino IDE. De huidige versie voor vandaag is 1.8. Eigenlijk firmware:
Stap 8 Stel uw telefoon in.
Op een Android-telefoon moet je een programma installeren om de robot via Bluetooth te bedienen. Er zijn er veel. U kunt "Bluetooth Arduino" invoeren in Google play en naar eigen smaak kiezen. Ik vond de BT-controller leuk. Download en installeer op uw Android-telefoon of -tablet. Vervolgens moet u via de Android-instellingen verbinding maken met onze module. Het wachtwoord voor de verbinding is "1234" of "0000". Configureer vervolgens het programma voor de juiste opdrachten. De lijst staat hieronder.
Stap 9 Computerinstellingen (indien nodig)
Indien nodig, of gewoon voor controle, kunt u een computer of laptop gebruiken. Hiervoor moet de computer Bluetooth hebben. We brengen communicatie met onze module tot stand via de bedieningselementen op de computer. Vervolgens hebben we een terminal nodig om opdrachten te verzenden. Handig voor jou.Nadat de firmware is opgenomen, wordt de besturing uitgevoerd met de volgende knoppen (opdrachten):
W - vooruit
S - terug
A - links
D - juist
F - stop
G - stuur
K - koplampen
L - koplamp uit
Het constant invoeren van opdrachten is lastig, dus ik raad aan om het programma te gebruiken om opdrachten te verzenden. Ik gebruik Z-Controller. Selecteer in het programma de poort (com-poort waarmee de verbinding wordt gemaakt) en configureer de toetsen voor de opdrachten. Stel inactief en intuïtief in.
