

De oprichting van het project begon in februari 2015. Eerst de robot de lijn van "Antei" was "Domovenok" - een robotborstel. Later verscheen "Antei 1".
Het Anteya-platform is een koffer uitgerust met een controller Arduino Uno, sensoren en instrumenten voor verschillende functies. Antei kan ook stofzuiger worden, een huishoudelijke maaidorser, een wachtrobot, enz.
Maar het belangrijkste kenmerk van Antey is het loslaten van "mieren" die Antey ontroeren.
Het werkingsprincipe van ons complex is ontleend aan de natuur zelf. Elke zogenaamde mier kan zelfstandig bewegen, maar kan ook collectief werk verrichten. Tegelijkertijd kunnen ze niet alleen een last die veel zwaarder is dan hun gewicht heffen, maar ze kunnen ook ongelooflijk grote lasten voor hen samen verplaatsen.
Elk van onze mieren is uitgerust met een vibratiemotor. Dit is een vrij onontgonnen voortstuwing. De voordelen zijn duidelijk. Ten eerste is dit type aandrijving zuiniger in energieverbruik. Ten tweede is hij compact in tegenstelling tot andere typen motoren, maar hij levert behoorlijke prestaties.
We ontdekten dat elke "mier" een gewicht had van 8 gram. kan slepen 89g., wat aangeeft dat hij 11 keer zijn eigen gewicht kan dragen.
Sinds de oprichting van Antei is er een vraag over het aantal vibratiemotoren, hoe ze zich op het platform van de robot bevinden en waaruit de poten van mieren (een tandenborstel of rubberen poten) moeten worden gemaakt. Er zijn veel opties geprobeerd.
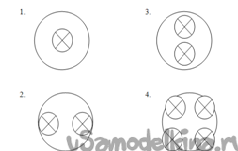
Maar er werd besloten om te vestigen 2 rijen van 3-4 mieren op rubberen poten aan elke kant van het platform, terwijl ze in een stevige koppeling met elkaar moeten zijn.
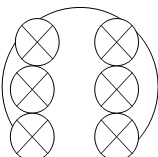
In deze uitvoering wordt een zelfverzekerde voorwaartse beweging bereikt en wanneer bepaalde motoren worden uitgeschakeld, wordt een zijwaartse draai gemaakt.


Onze Antey
