

De auteur heeft dit project gebaseerd op een eenvoudigere versie. zelfgemaakt boten, en perfectioneerde het. Sensoren worden in de boot geplaatst om obstakels te vermijden en in het licht te komen. Hoe de controller in de boot wordt gebruikt Arduinoaan de voorkant is een ultrasone sensor geïnstalleerd en aan de zijkanten bevinden zich lichtsensoren. Deze eenvoudige boot stort niet tegen de muren en wordt bestuurd door een zaklamp.
Materialen en gereedschappen:
- Isolatietape / plakband
- Thermoglue met hete lijm
- DC-motoren 2 stuks
- Plastic flessen 2 stuks
- draden
- Kleine propellers 2 stuks
- Arduino, computer en USB-kabel
- Plastic doos
- 9V batterij en connector
- Vermogensdiodes (type 1N4004)
- Weerstanden
- Transistor MOSFET of TIP 120
- Twee fotocellen en twee knoppen
- schaar
- Soldeer met een soldeerbout

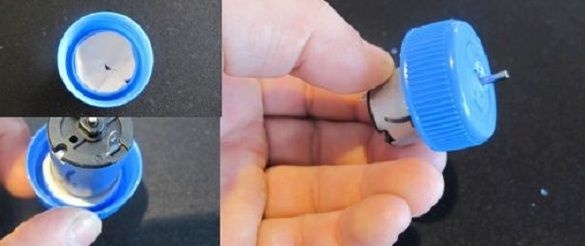
Stap 1. Motoren installeren.
De deksels worden van de flessen verwijderd en in elk van hen wordt een gat gemaakt. In de hoes knijpt de auteur hete lijm zonder de gaten te sluiten. Hij plaatste de motoras in het gat en plakte het op de lijm. Nadat de lijm is opgedroogd, draait de as vrij. Dezelfde procedure vindt plaats bij de tweede omslag.
Stap 2. De flessen bevestigen.
De flessen werden aan elkaar bevestigd volgens het principe van een vlot met behulp van drie stroken plakband.

Stap 3. Solderen aan de motoren.
Omdat de motoren die in de stekkers waren gemonteerd geen draden hadden, was het nodig om ze te solderen, de lengte van de draden was ongeveer 25-30 cm.

Stap 4. De snede in de flessen.
Om ervoor te zorgen dat de draden in de romp van de boot vallen, wordt vanaf hun bovenkant een kleine sleuf gemaakt.

Stap 5. De motoren vastzetten.
Verder verdraait de auteur de deksels op de flessen, omdat ze niet goed draaiden; ik moest hete lijm gebruiken. Draden worden door de voorbereide gaten in de flessen geduwd.

Stap 6. Case.
Een plastic doosje plakt aan twee flessen. In deze capaciteit voor elektronica kunt u gaten maken voor de draden of de draden door de achterkant van de doos houden. De gaten voor de draden op de flessen zijn geïsoleerd met smeltlijm.

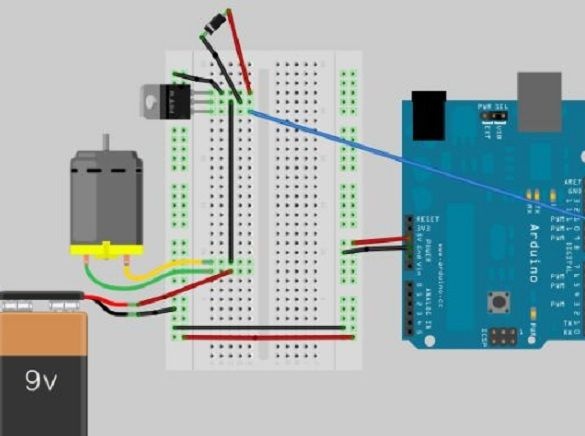
Stap 7. Aansluitschema.
Het circuit gebruikt een TIP 120-transistor als schakelaar (u kunt vergelijkbare MOSFET- of Darlington-transistors gebruiken). Het wordt gebruikt om de belasting te schakelen bij het verbruiken van een grote hoeveelheid stroom, omdat de Arduino niet genoeg vermogen heeft voor de motoren. Dit circuit is gemonteerd voor de eerste en vervolgens voor de tweede motor (een andere batterij is niet nodig voor de tweede motor).
Stap 8. Sensoren.
De ultrasone sensor is geweldig voor de voorkant van de boot en waarschuwt onderweg voor obstakels. Fotocellen werken als antennes en worden gebruikt om de boot in het licht te laten drijven.De knoppen aan de zijkanten worden gebruikt als obstakelsensoren. Je kunt ook de code wijzigen en andere sensoren gebruiken, zoals infrarood.

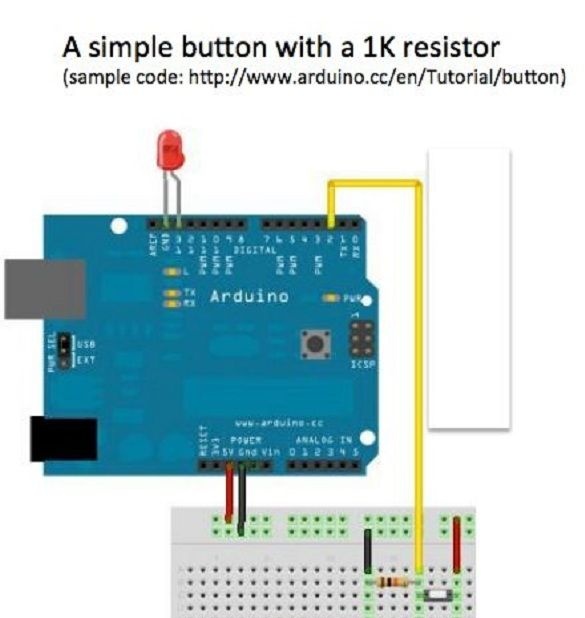
Stap 9. Regelingen voor sensoren.
Het diagram toont de aansluiting van een eenvoudige knop en een 1K-weerstand. Het schema voor beide knoppen wordt herhaald, de knoppen zijn aan beide zijden van de boot geplaatst. Zij zijn verantwoordelijk voor het veranderen van de beweging van de boot bij een aanvaring.
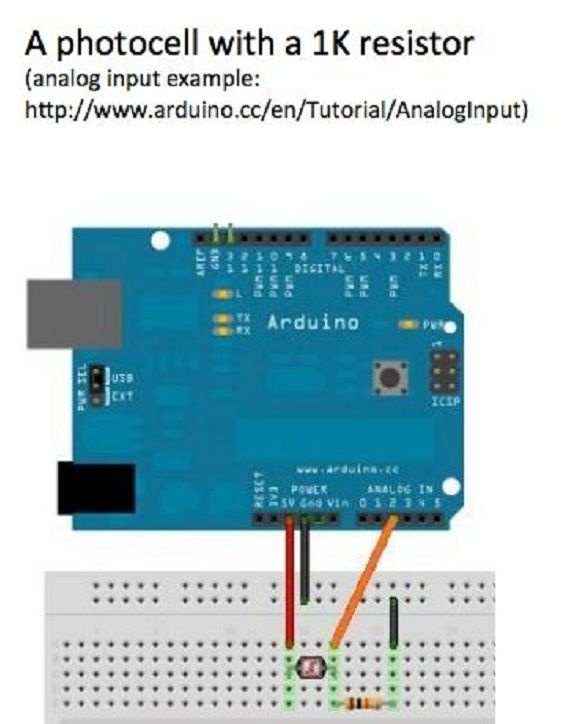
De volgende afbeelding toont een circuit met een 1K-weerstand en fotocel. De auteur heeft het 2 keer uitgevoerd en de fotocellen aan weerszijden van de boot geplaatst.
Stap 10. Programmacode.
De auteur bood de mogelijkheid om de code voor gebruik te downloaden en daarmee basisfunctionaliteit te bieden aan degenen die zo'n boot gaan monteren. De code bevat ondersteuning voor fotocellen, afstandsmeter en knoppen. De boot probeert obstakels voor zichzelf te vermijden en draait in de tegenovergestelde richting wanneer hij obstakels van opzij tegenkomt. Als er geen wens is om de hele set sensoren te gebruiken, maar slechts enkele van hen hebben een code voor elk afzonderlijk. U kunt alle codes onder het artikel downloaden.
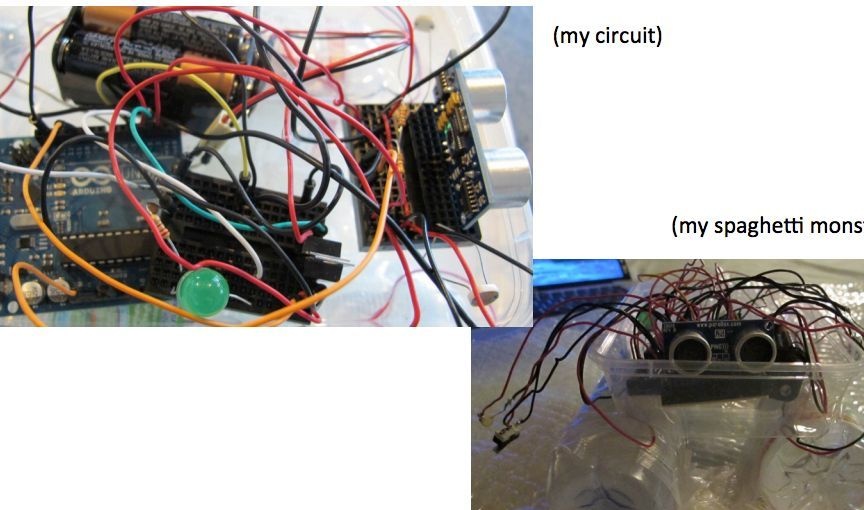
Stap 11. De boot monteren.
Gemonteerd circuit, Arduino en batterijen zijn verpakt.
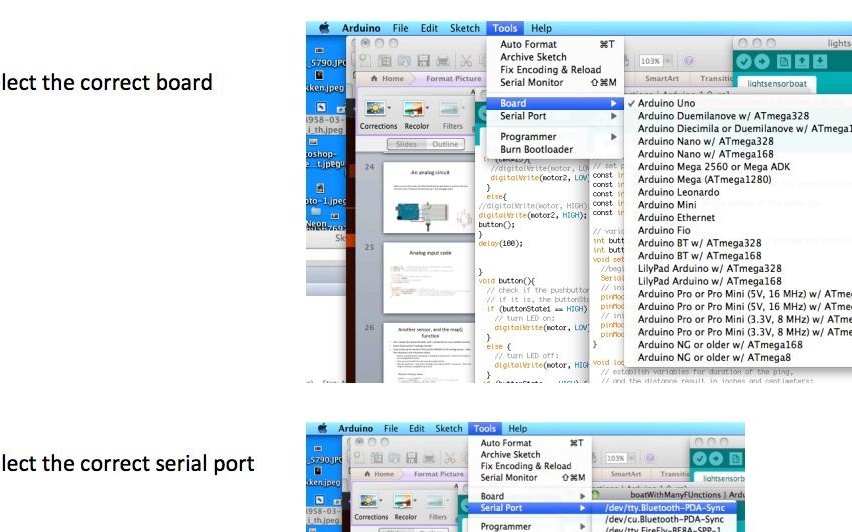
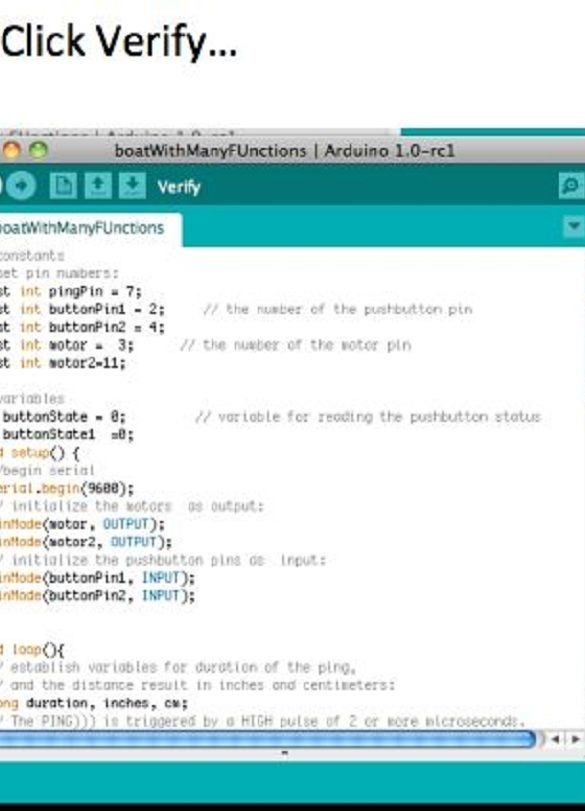
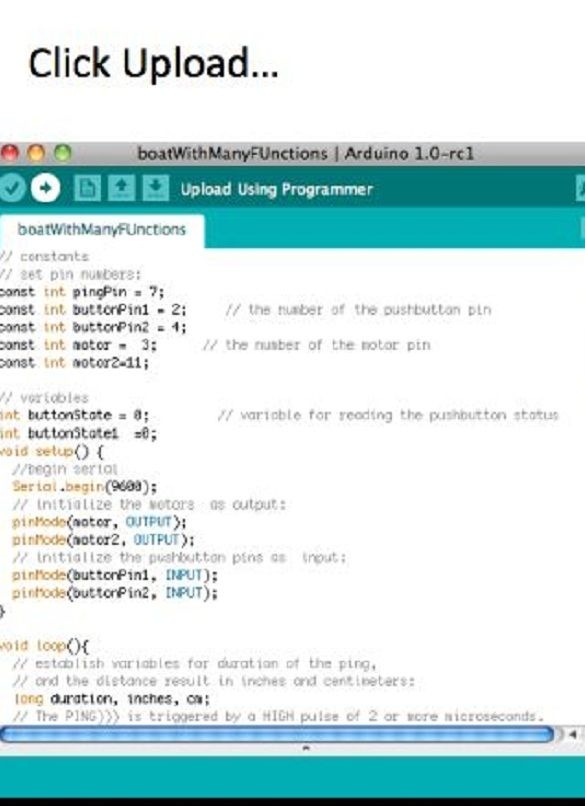
Stap 12. Download de schets.
Vervolgens wordt de Arduino IDE geopend, waarbij het juiste bestand en de juiste poort worden gekozen, waarna de auteur de code heeft gecompileerd en naar de controller heeft geüpload.
Stap 13. Waterbestendig en test.
De auteur isoleerde bovendien alle mogelijke plaatsen van binnendringend water met hete lijm. Isoleerde ook alle draden tegen kortsluiting. De container met Arduino is bedekt met dezelfde doos en verzegeld met elektrische tape. Propellers zijn bevestigd aan de motoren. Hier is de boot klaar, nu kun je beginnen met testen op het water.



Video met een voorlopige test van de boot: