
Dit artikel gaat in op hoe doe het zelf Je kunt zo'n interessant apparaat maken als Levitron. In feite is een levitron een tol of ander object dat in de ruimte zweeft als gevolg van de werking van een magnetisch veld. Levitrons zijn divers. Het klassieke model maakt gebruik van een systeem van permanente magneten en een tol. Het zweeft tijdens rotatie over de magneten vanwege de vorming van een magnetisch kussen eronder.
De auteur besloot het systeem een beetje te verbeteren door een levitron te bouwen op basis van Arduino met behulp van elektromagneten. Met deze methoden hoeft de bovenkant niet te draaien om in de lucht te zweven.
Zo'n apparaat kan voor verschillende andere worden gebruikt zelfgemaakt. Het kan bijvoorbeeld een uitstekende lager zijn, omdat er praktisch geen wrijvingskrachten in zitten. Ook op zo'n zelfgemaakt product kun je verschillende experimenten uitvoeren, nou ja, of vrienden spelen.
Materialen en gereedschappen voor productie:
- microcontroller Arduino UNO;
- lineaire Hall-sensor (het model UGN3503UA);
- oude transformatoren (voor wikkelspoelen);
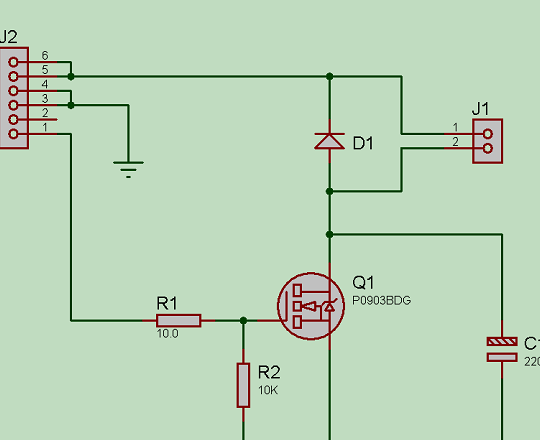
- veldeffecttransistor, weerstanden, condensatoren en andere elementen (waarden en merken worden weergegeven in het diagram);
- draden;
- soldeerbout met soldeer;
- 12V voeding;
- kurk;
- een kleine neodymiummagneet;
- hete lijm;
- De basis voor het wikkelen van spoelen en materialen voor het maken van een zelfgemaakte body.
Het productieproces van levitron:
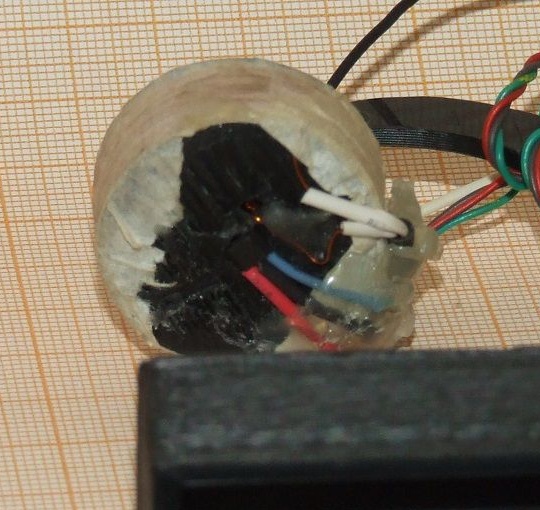
Eerste stap. Maak een spoel
De spoel zal een elektromagneet zijn, hij zal een magnetisch veld creëren dat de bovenkant zal aantrekken. Als top komt er een kurk waarop een neodymium magneet is bevestigd. In plaats van kurk kun je andere materialen gebruiken, maar niet te zwaar.
Wat betreft het aantal windingen in de spoel, hier noemde de auteur zo'n figuur niet, de spoel ging naar het oog. Als resultaat was de weerstand ongeveer 12 ohm, hoogte 10 mm, diameter 30 mm en de dikte van de gebruikte draad zou 0,3 mm moeten zijn. Er zit geen kern in de spoel, mocht je een zwaardere top moeten maken dan kan de spoel worden voorzien van een kern.
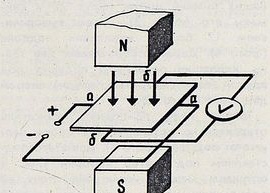
Stap twee De rol van de Hall Sensor
Om ervoor te zorgen dat de bovenkant in de lucht zweeft, in plaats van stevig vast te houden aan de solenoïde, heeft het systeem een sensor nodig die de afstand tot de bovenkant kan meten. Als zodanig wordt een Hall-sensor gebruikt. Deze sensor kan niet alleen het magnetische veld van een permanente magneet detecteren, maar kan ook de afstand tot metalen voorwerpen bepalen, omdat dergelijke sensoren zelf een elektrisch magnetisch veld creëren.
Dankzij deze sensor blijft de bovenkant altijd op de juiste afstand van de solenoïde.

Wanneer de bovenkant begint weg te bewegen van de spoel, verhoogt het systeem de spanning. Omgekeerd, wanneer de bovenkant een solenoïde nadert, verlaagt het systeem de spanning in de spoel en verzwakt het magnetische veld.
Er zijn drie uitgangen op de sensor, dit is 5V vermogen, evenals een analoge uitgang. Deze laatste is aangesloten op de Arduino ADC.
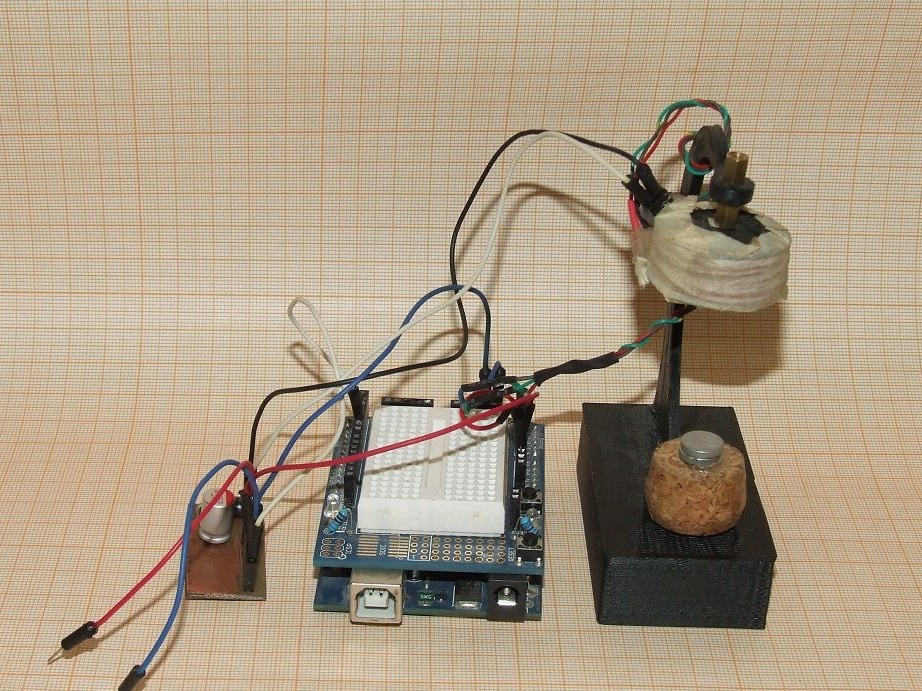
Stap drie We assembleren het circuit en installeren alle elementen
Als lichaam voor zelfgemaakt werk kunt u een stuk hout gebruiken, waaraan u een eenvoudige beugel moet maken om de spoel te bevestigen. Elektronisch het schema is vrij eenvoudig, alles is te begrijpen op de foto. Elektronica werkt op een 12V-bron en aangezien de sensor 5V nodig heeft, wordt hij aangesloten via een speciale stabilisator, die al in de Arduino-controller is ingebouwd. Het maximale apparaat verbruikt ongeveer één ampère. Wanneer de bovenkant stijgt, ligt het stroomverbruik in het bereik van 0,3-0,4 A.
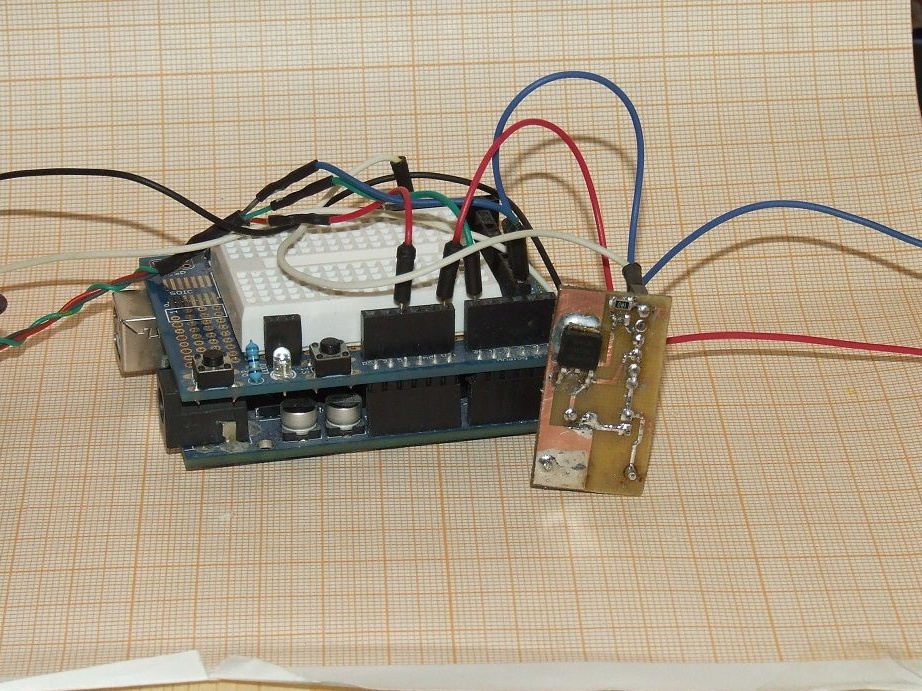
Een veldeffecttransistor wordt gebruikt om de solenoïde te regelen. De solenoïde zelf is verbonden met de uitgangen van J1 en het eerste contact van de J2-connector moet worden aangesloten op de PWM Arduino. Het diagram laat niet zien hoe de Hall-sensor op de ADC moet worden aangesloten, maar daar zouden geen problemen mee mogen zijn.
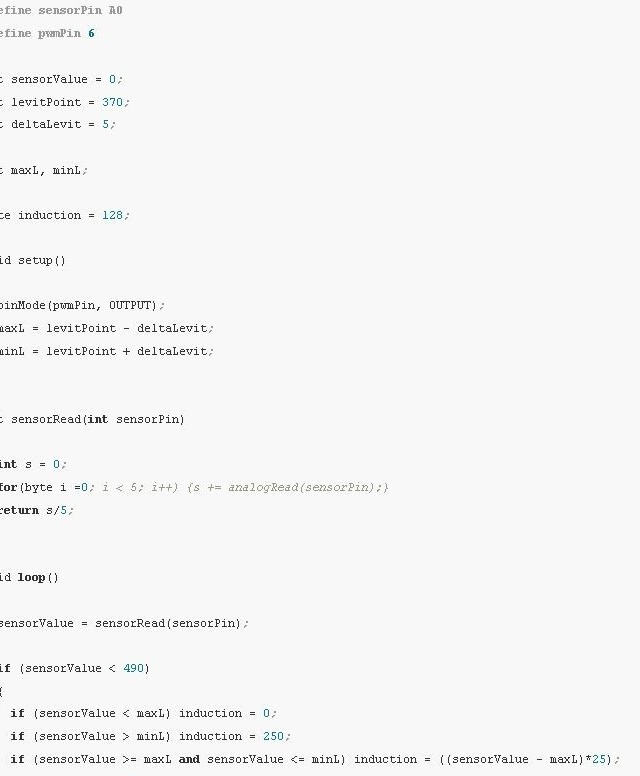
Stap vier Controllerfirmware
Om de controller te programmeren voor de noodzakelijke acties, is firmware vereist. Het programma werkt heel eenvoudig. Wanneer de waarden buiten het toegestane bereik beginnen te vallen, verhoogt het systeem de stroom naar het maximum of schakelt het volledig uit. In latere versies van de firmware werd het mogelijk om de spanning op de spoel soepel aan te passen, zodat de scherpe fluctuaties van de bovenkant stopten.
Dat is alles, het zelfgemaakte product is klaar. Bij de eerste start werkte het apparaat, maar er werden enkele gebreken ontdekt. Dus toen bijvoorbeeld langer dan 1 minuut werd gewerkt, begonnen de spoel en transistor erg heet te worden. In dit opzicht moet je in de toekomst een radiator op de transistor installeren of een krachtigere plaatsen. De spoel moet ook worden vernieuwd, omdat hij een betrouwbaarder ontwerp heeft bedacht dan alleen draadspoelen met hete lijm.
Om de stroombron te beschermen, moeten grote condensatoren worden geleverd aan de ingangscircuits. De eerste voeding van 1,5 A van de auteur was na 10 seconden doorgebrand als gevolg van sterke stroomstoten.
In de toekomst is het de bedoeling om het hele systeem over te brengen naar een 5V-voeding.