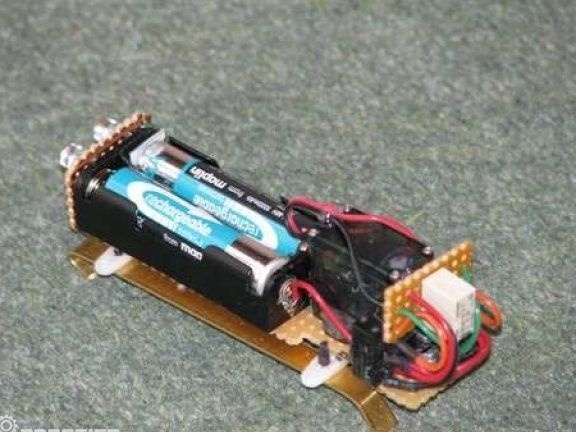
Carpet Crawler is een kleine robot uit de BEAM-klasse. Zo'n robots onmiddellijk twee elementen bevatten zoals esthetiek, biologie, elektronica en mechanica. Dankzij deze aanpak imiteren dergelijke robots zoveel mogelijk levende wezens, soms lijkt het alsof ze kunnen denken.
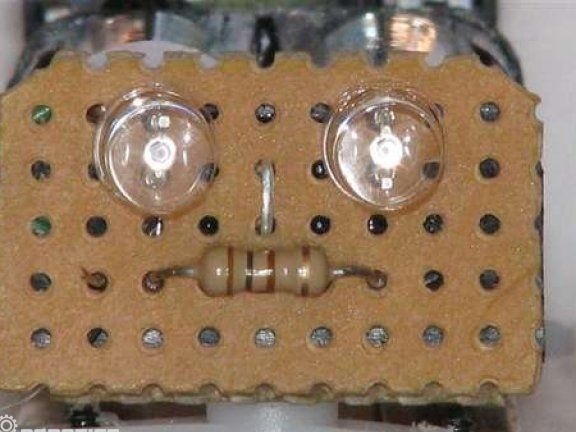
Als brein voor dergelijke robots worden sensoren en schakelaars gebruikt en beweegt zelfgemaakt vanwege de servomotor. Als stroom worden AAA-batterijen gebruikt. Omdat de ogen helder branden, zijn er twee LED's geïnstalleerd.
Materialen en gereedschappen voor productie:
- koperen strip van 1/32 "x 1/4" x 8 ",
- twee stuks koperstrips;
- M2 moeren en bots;
- servomotor (Micro RC (7,5 g));
- twee microschakelaars (te verkrijgen bij oude drives);
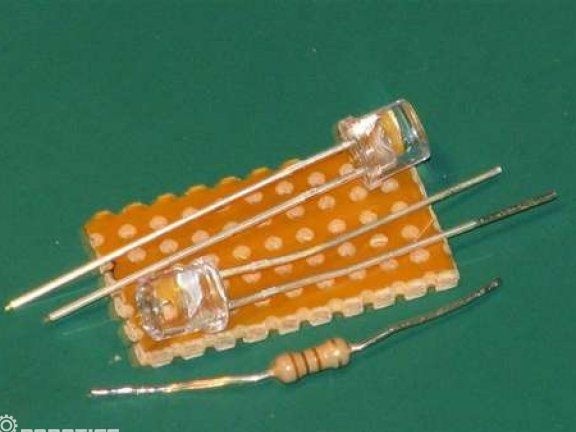
- twee LED's (u kunt het beste rood gebruiken, omdat wit of blauw in dit geval kan werken);
- één 100R-weerstand (als de LED's geel of groen zijn, dan 47R);
- twee AAA-batterijen en een houder daarvoor;
- dunne bedrading.




Fabricageproces:
Eerste stap. Wijziging van de servomotor
De servomotor is zo ontworpen dat hij tijdens bedrijf impulsieve bewegingen maakt. In dit geval moet het opnieuw worden gedaan, zodat het bij rotatie werkt. Dit kan op twee manieren.
In het eerste geval kunt u snelheid en richting opslaan via motorregeling en besturingselektronica. Het apparaat heeft nog steeds inkomende pulsen nodig om te kunnen werken.
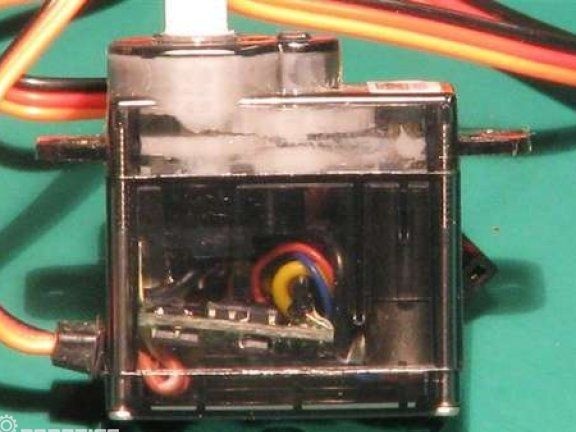
De auteur ging de andere kant op. Het stopelement van de tandwielen moet worden afgesneden. Vervolgens moeten de versnellingen in een rij staan, het zal moeilijk zijn om ze terug te monteren als de volgorde verloren gaat. Bij demontage moet het oppervlak van de servomotor worden gesmeerd met siliconenvet.
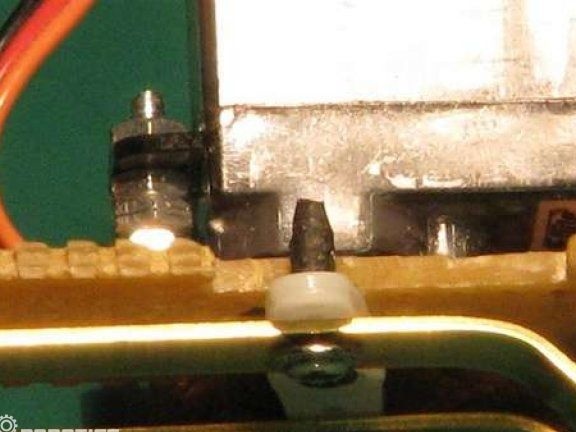
De afbeelding toont het RSV-controlemechanisme dat moet worden verplaatst.

Na het verwijderen van het bord moet de rode draad worden omgeschakeld naar precies die rode draad van de motor. Draden moeten zorgvuldig worden omwikkeld met elektrische tape om kortsluiting te voorkomen.

Stap twee Maak het mechanische onderdeel
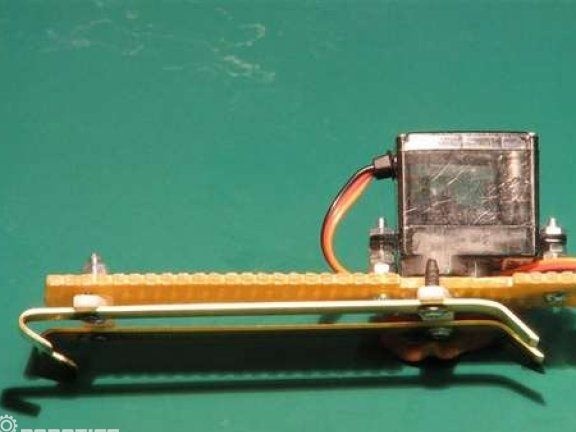
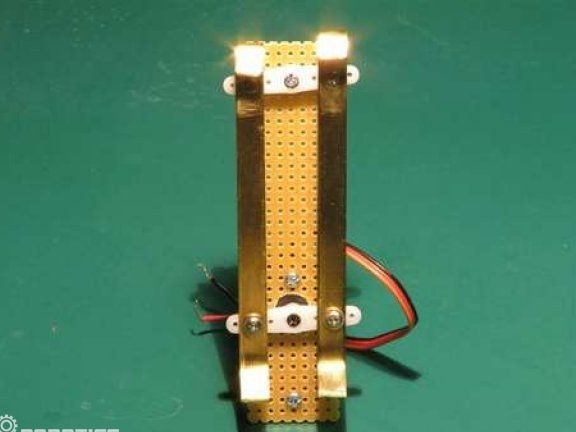
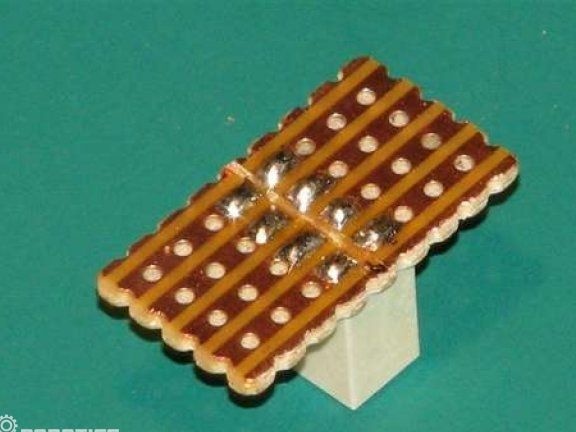
In het werkbord moet u verschillende gaten boren en vervolgens het relais op de achterkant van de batterij installeren.Voor montage van de servoaandrijving worden 2 mm bouten gebruikt.
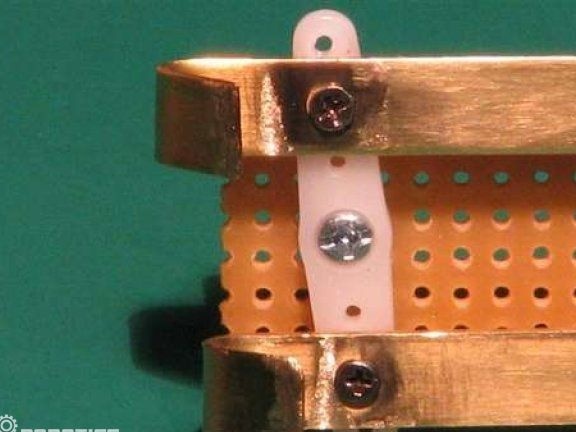
De poten van de robot zijn gemaakt van massief koperen platen, hiervoor worden ze eerst in stukken van een bepaalde lengte gesneden en buigingen gemaakt. Dankzij dergelijke uitwijkingen klampt de robot zich vast aan de weg en kruipt. Bevestig de plaat met kleine schroeven.


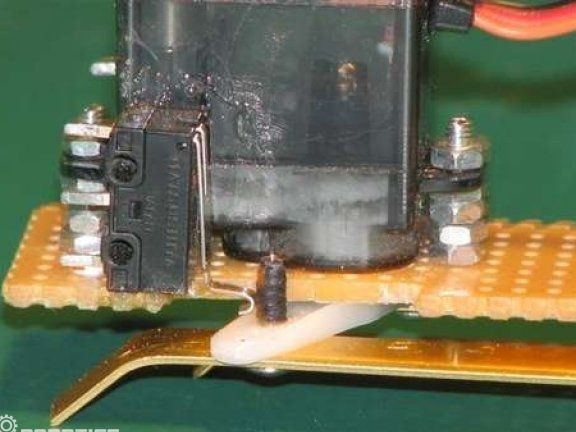
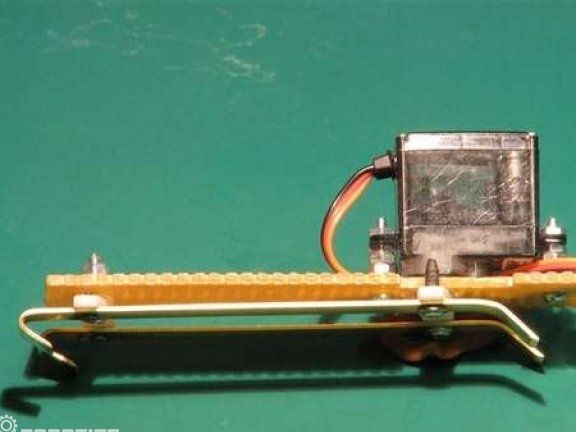
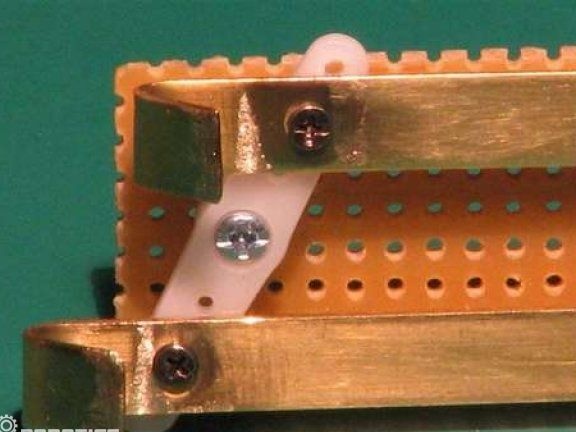
Om de benen te bedienen, moet je de schakelaars instellen. Ze worden met lijm aan de servomotor bevestigd.
Stap drie Robot elektronisch circuit
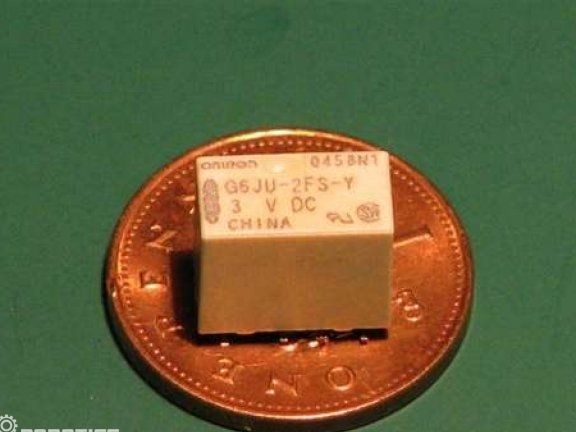
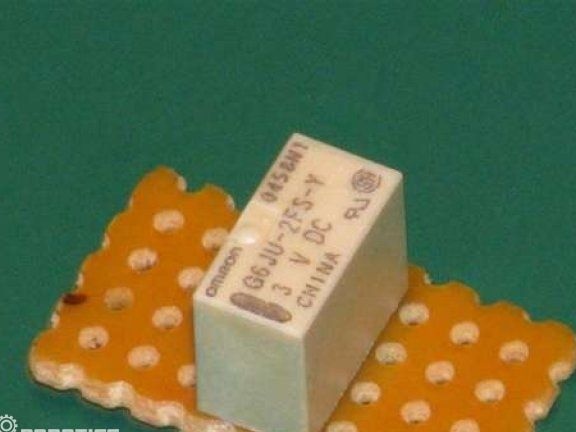
Het belangrijkste onderdeel in het werk van zelfgemaakt kan worden beschouwd als een relaisvergrendeling, die zal werken wanneer deze is losgekoppeld van de spoel. Het relais verandert van beweging, maar blijft op de ene plaats tot de volgende beurt.
De pulsen naar de spoelen komen van twee microschakelaars, ze gaan aan wanneer het relais van de antenne de schakelaar raakt.

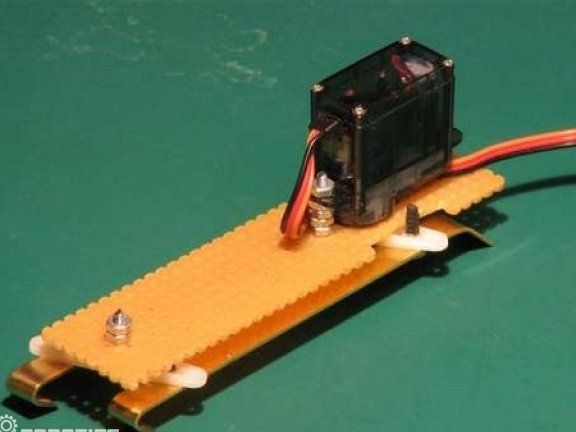
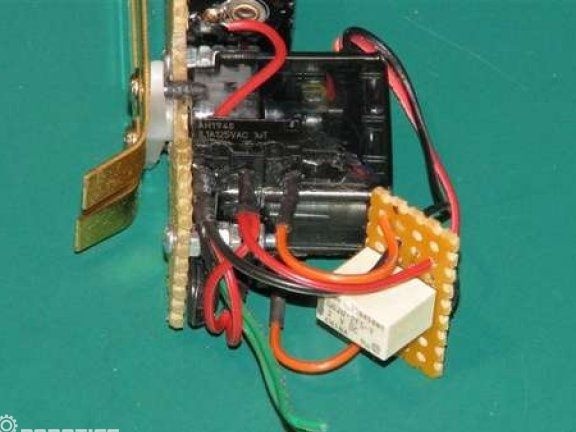
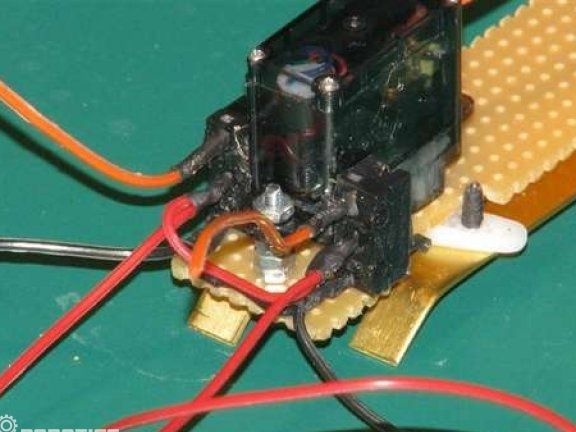
Stap vier Montage van het elektronische deel
Het relais is gemonteerd op een schroot op een plaat, dus het is het gemakkelijkst aan te sluiten. Het hele proces van het aansluiten van elektronica wordt getoond op de foto.





Dat is alles, nu is de robot klaar. Het beste van alles is dat hij zichzelf op het tapijtoppervlak lijkt, omdat het speciaal voor dergelijke plaatsen is ontworpen. Eerst moet de robot de leds oplichten en dan kruipt hij langzaam over de vloer.