Een magnetometer, ook wel gaussmeter genoemd, meet de sterkte van een magnetisch veld. Dit is een belangrijk hulpmiddel voor het controleren van permanente magneten en elektromagneten en voor het begrijpen van de vorm van de veldconfiguraties van niet-standaard magneten. Met voldoende gevoeligheid kan het ook gemagnetiseerde ijzeren objecten detecteren. Tijd variërende velden van motoren en transformatoren kunnen worden gedetecteerd als de sonde voldoende gevoelig is.
In dit artikel zal de Wizard je vertellen hoe je een eenvoudige draagbare magnetometer maakt met gemeenschappelijke componenten: een lineaire Hall-sensor, Arduino, display en knop. De totale kosten zijn minder dan 5 euro en de gevoeligheid is ~ 0,01 mT in het bereik van -100 tot + 100 mT. Dit is beter dan je van zo'n apparaat zou verwachten. Om nauwkeurige metingen te verkrijgen, moet u het instrument kalibreren en de wizard beschrijft dit proces ook.
Gereedschap en materialen:
-SS49E lineaire Hall-sensor;
-Arduino Uno;
-SSD1306 - 0,96-inch zwart-wit OLED-scherm met I2C-interface;
-Micro-knop;
- Balpen;
-3 dunne draden;
-12 cm dunne (1,5 mm) krimpkous;
-Plastic doos (18x46x83 mm);
-Schakelen;
-Batterij 9V;
-Batterijhouder;
Stap één: Theorie
Je kunt een smartphone gebruiken om het magnetische veld te meten. Smartphones bevatten meestal een magnetometer met 3 assen, maar deze is meestal geoptimaliseerd voor een zwak magnetisch veld van de aarde ~ 1 Gauss = 0,1 mT. De locatie van de sensor op de telefoon is niet bekend en het is niet mogelijk om de sensor in nauwe gaten te plaatsen, zoals het gat van een elektromagneet.
Het Hall-effect is een veelgebruikte manier om magnetische velden te meten. Wanneer elektronen in een magnetisch veld door een geleider stromen, wijken ze lateraal af en creëren zo een potentiaalverschil aan de zijkanten van de geleider. Met de juiste materiaalkeuze en de geometrie van de halfgeleider wordt een meetbaar signaal verkregen, dat kan worden versterkt en de meting van één component van het magnetische veld kan worden gegarandeerd.
De wizard maakt gebruik van een goedkope en algemeen verkrijgbare SS49E-sensor.
Dit zijn de kenmerken:
• Energiezuinig
• Handige PCB-interface
• Stabiel laag geluidsniveau
• Voedingsspanningsbereik van 2,7 V DC tot 6,5 V DC
• Gevoeligheid 1,4 mV / G
• Responstijd: 3 mks
• Lineariteit (% van bereik) 0,7%
• Bedrijfstemperatuurbereik van -40 ° C tot 100 ° C
De sensor is compact, ~ 4x3x2 mm. Meet de component van het magnetische veld loodrecht op het vooroppervlak. De sensor is bipolair en heeft 3 pinnen - Vcc Gnd Out
Stap twee: breadboard
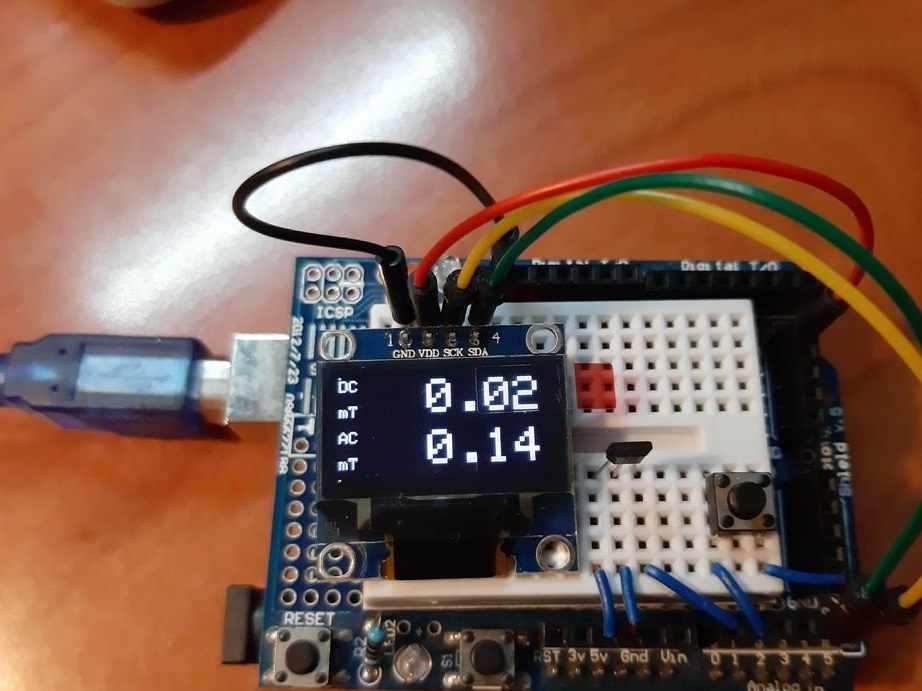
Eerst assembleert de meester het circuit op een breadboard. Verbindt de Hall-sensor, display en knop: De Hall-sensor moet worden aangesloten op + 5V, GND, A1 (van links naar rechts). Het beeldscherm moet zijn aangesloten op GND, + 5V, A5, A4 (van links naar rechts). Wanneer de knop wordt ingedrukt, moet er een aardverbinding tot stand worden gebracht op A0.
De code is geschreven en gedownload met de Arduino IDE-versie 1.8.10. Vereist installatie van de Adafruit_SSD1306- en Adafruit_GFX-bibliotheken.
Het display moet de gelijkstroomwaarde en de wisselstroomwaarde weergeven.
De code is hieronder te downloaden.
Magnetometer.ino
Stap drie: Sensor
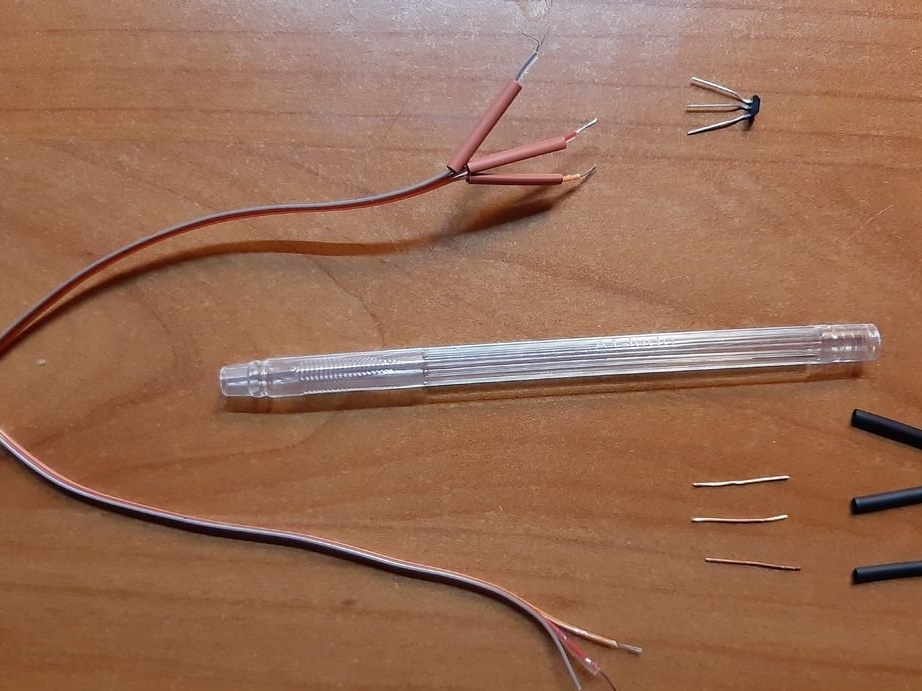
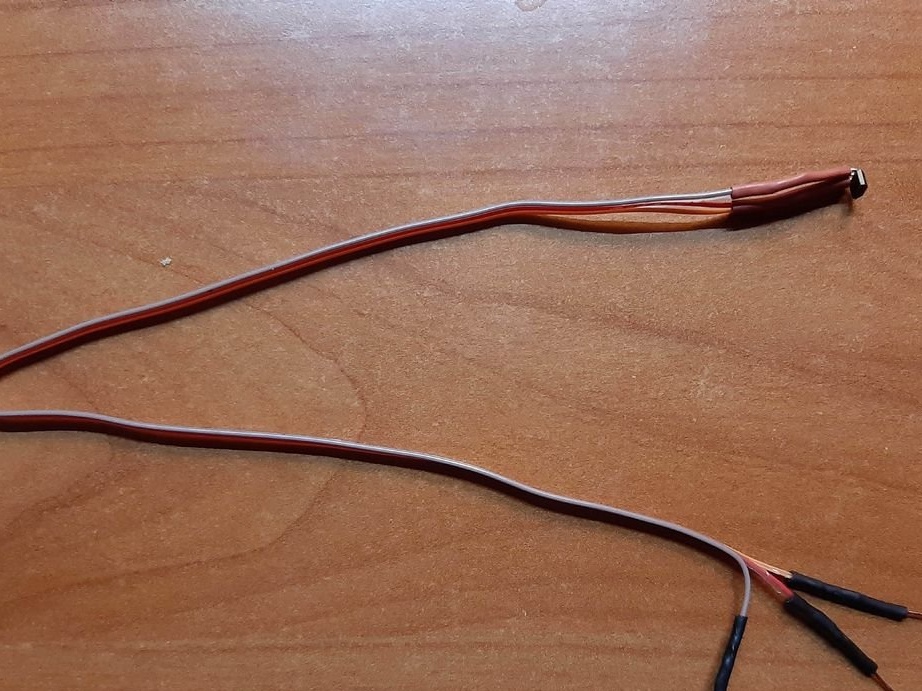
De Hall-sensor kan het beste aan het einde van een smalle buis worden geïnstalleerd. Deze opstelling is erg handig en kan gemakkelijk in nauwe gaten worden geplaatst. Elke holle buis van niet-magnetisch materiaal is voldoende. De meester gebruikte een oude balpen.
U moet drie dunne flexibele draden voorbereiden die langer zijn dan de buis. Gesoldeerd de draden aan de poten van de sensor, geïsoleerd.
Stap vier: bouwen
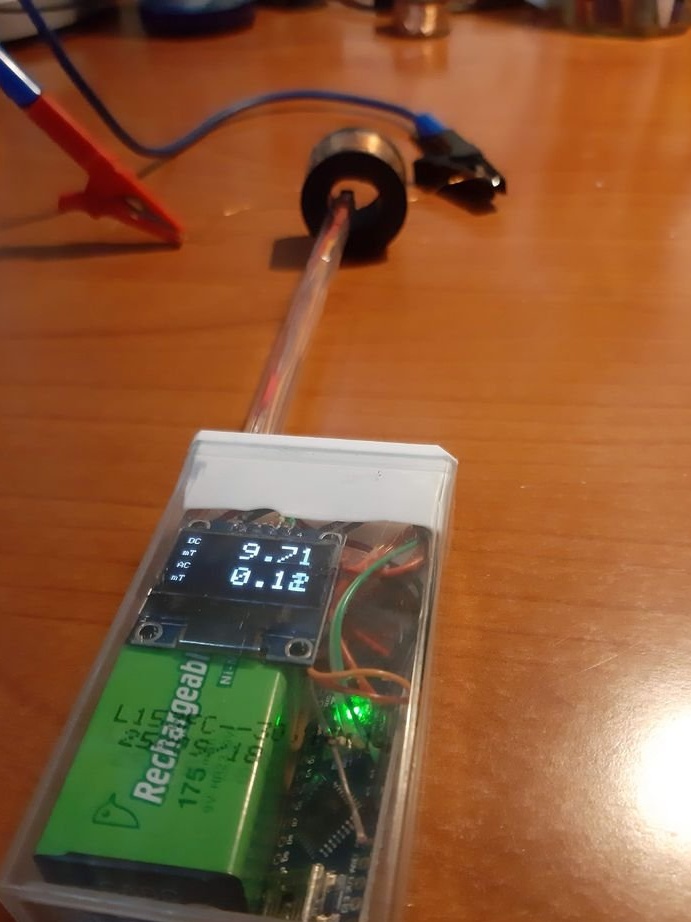
De 9V-batterij, het OLED-scherm en de Arduino Nano passen comfortabel in een Tic-Tac-doos. Het voordeel is dat het transparant is, waardoor de waarden op het scherm goed af te lezen zijn aan de binnenkant. Alle vaste componenten (sensor, schakelaar en knop) zijn aan de bovenkant bevestigd, zodat het hele apparaat uit de doos kan worden verwijderd om de batterij te vervangen of de code bij te werken.
De master was geen fan van 9 V batterijen, ze zijn duur en hebben een kleine capaciteit. Maar de plaatselijke supermarkt verkocht opeens een oplaadbare versie van NiMH voor elk 1 euro. Ze kunnen eenvoudig worden opgeladen als ze 's nachts worden gevoed met 11 V via een 100 Ohm weerstand. Om de accu aan te sluiten gebruikt de master de contacten van de oude 9 V accu. 9V-batterij is compact. Van batterij + geserveerd op Vin Arduino, minus op GND. Een uitgang van +5 V heeft een instelbare spanning van 5 V voor het display en voor de Hall-sensor.
De Hall-sonde, het OLED-scherm en de knop worden op dezelfde manier aangesloten als op het breadboard. De enige toevoeging is dat de aan / uit-knop is geïnstalleerd tussen de 9V-batterij en de Arduino.

Stap vijf: kalibratie
De kalibratieconstante in de code komt overeen met het nummer dat is aangegeven in de technische beschrijving (1,4 mV / gauss), maar de technische beschrijving laat een breed bereik toe (1,0-1,75 mV / gauss). Om nauwkeurige resultaten te krijgen, moeten we de sonde kalibreren.
De eenvoudigste manier om een magnetisch veld met een nauwkeurig gedefinieerde kracht te creëren, is door een solenoïde te gebruiken.
Voor de berekening wordt de volgende formule gebruikt: B = mu0 * n * I. De magnetische constante is constant mu0 = 1.2566x10 ^ -6 T / M / A. Het veld is uniform en hangt alleen af van de dichtheid van de wikkelingen n en stroom I, die met goed kan worden gemeten nauwkeurigheid (~ 1%). De bovenstaande formule werkt in dit geval als de verhouding van lengte tot diameter L / D> 10.
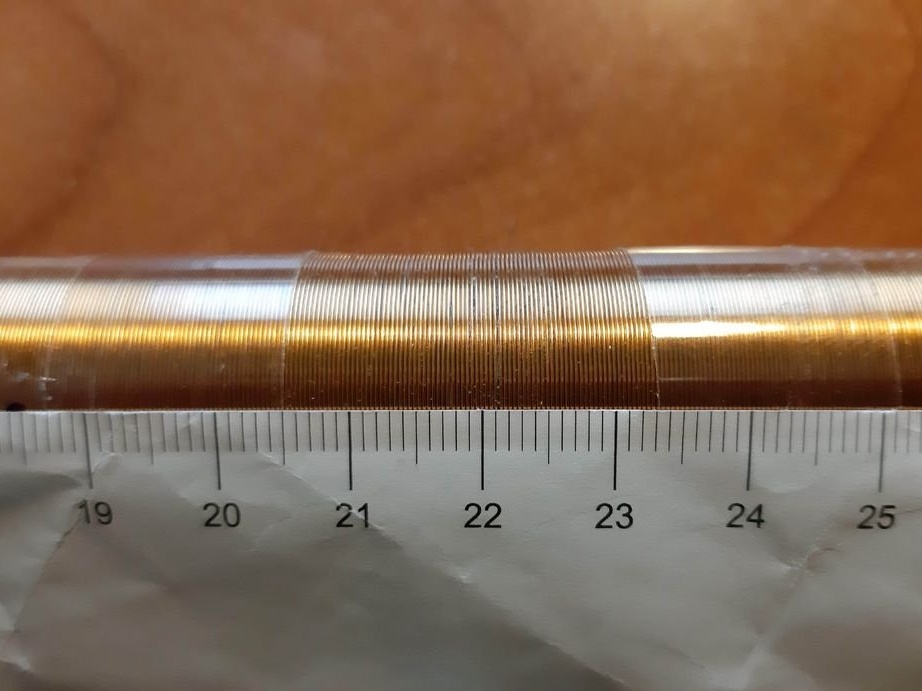
Om een geschikte solenoïde te maken, moet je een holle cilindrische buis met L / D> 10 nemen en de wikkeling opwinden. De meester gebruikte een PVC-buis met een buitendiameter van 23 mm. Het aantal beurten is 566. De weerstand is 10 ohm.
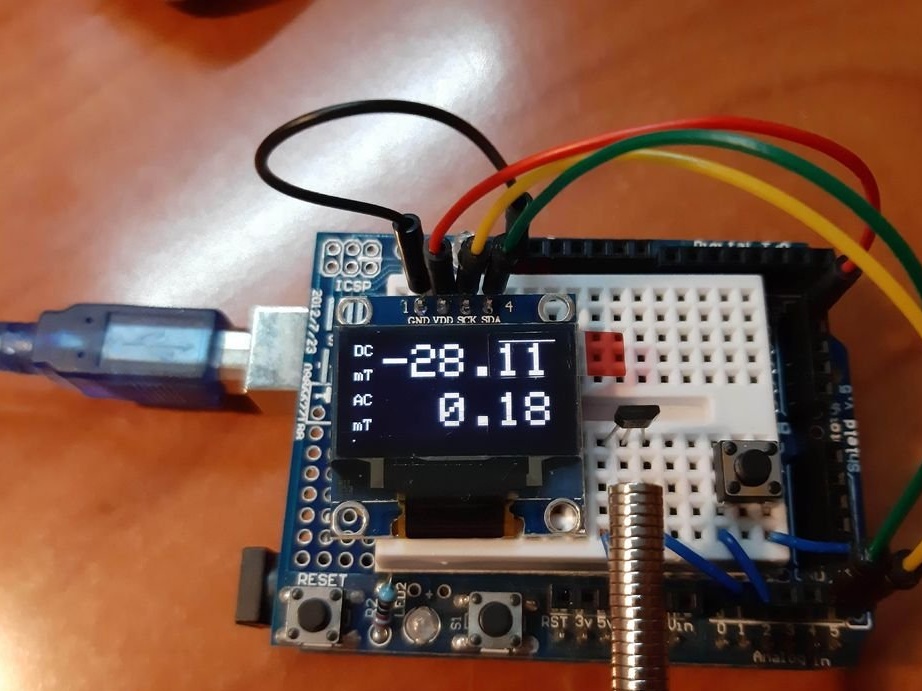
Het levert dan stroom aan de spoel en meet de stroom met een multimeter. Om de stroom te regelen, gebruikt het een wisselspanningsbron of een variabele belastingsweerstand. Meet het magnetische veld voor verschillende huidige instellingen en vergelijkt dit met de metingen.
Vóór kalibratie toonde de sensor 6,04 mT, terwijl deze in theorie 3,50 mT was. Daarom vermenigvuldigde de meester de kalibratieconstante in regel 18 van de code met 0,58. De magnetometer is nu gekalibreerd.