


In dit artikel zal de Wizard ons vertellen hoe hij een robotbarman heeft gemaakt die wordt bestuurd door een smartphone.
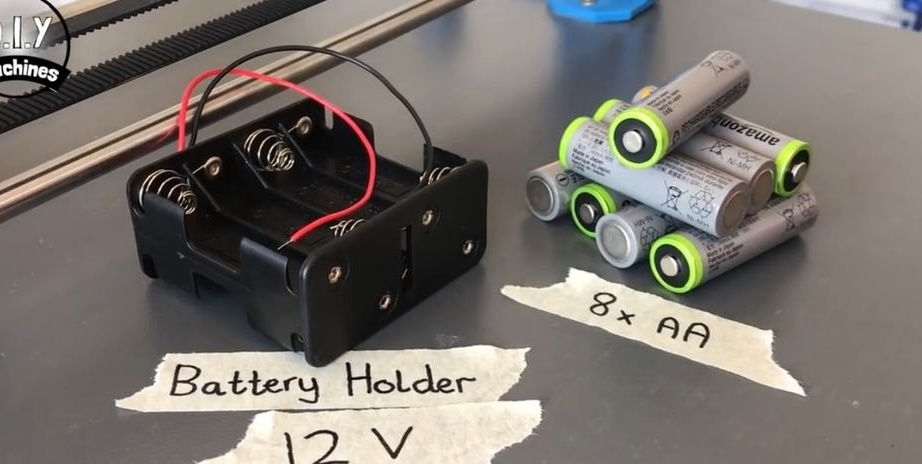
Kenmerken van het apparaat: werk aan Arduino, betaalbare prijs, bluetooth-bediening vanuit elke gadget, autonomie (werk met 8 AA-batterijen).
Om zo'n apparaat te bouwen, gebruikte de meester het volgende
Materialen en gereedschappen:
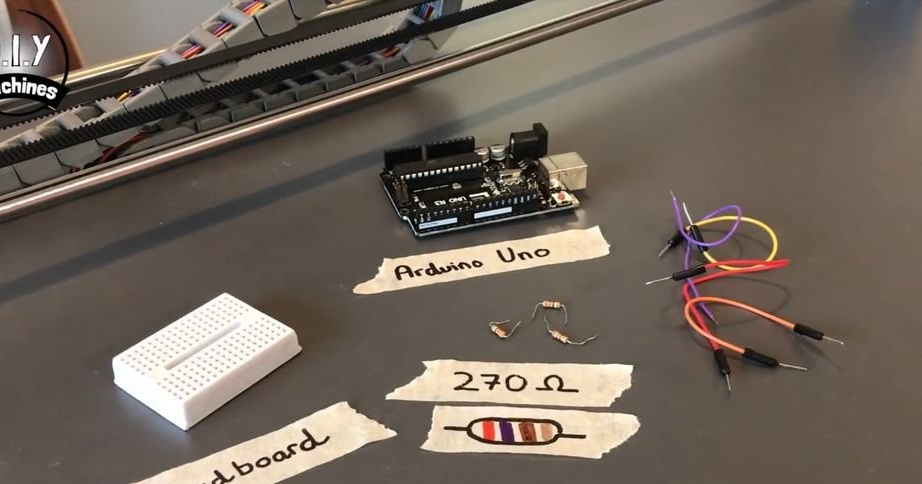
-Arduino Uno;
-Stuurmotor L293D;
- contactschakelaar;
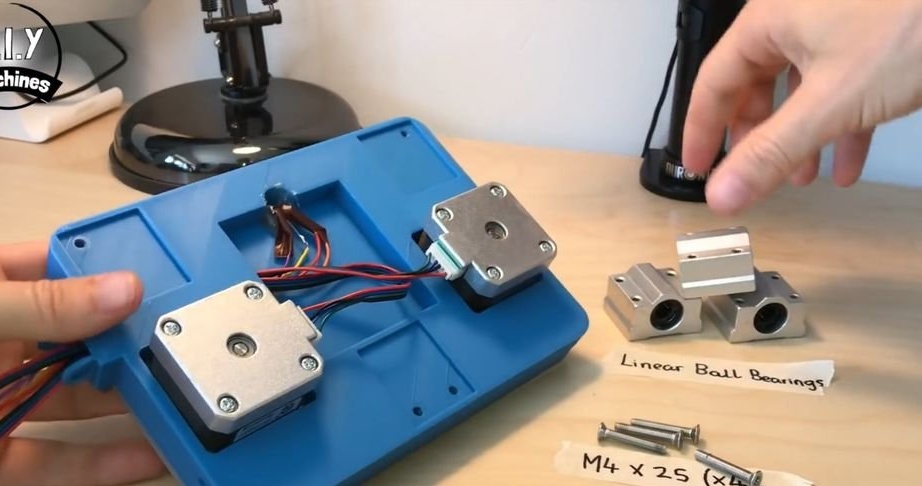
-Lineaire lagers;
-Stap motor;
-Riem en katrol (versie 2m);
-Riem en katrol (versie 5m);
-HM10 Bluetooth-module;
-Een schroevendraaier;
-Fasters;
-Poten;
-Tafelblad;
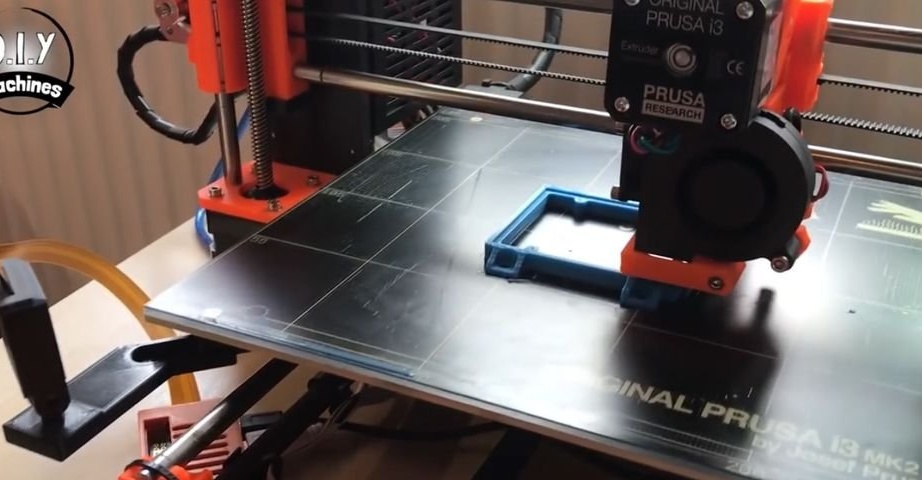
-3D-printer;
-Metalen staven;
- schroevendraaier;
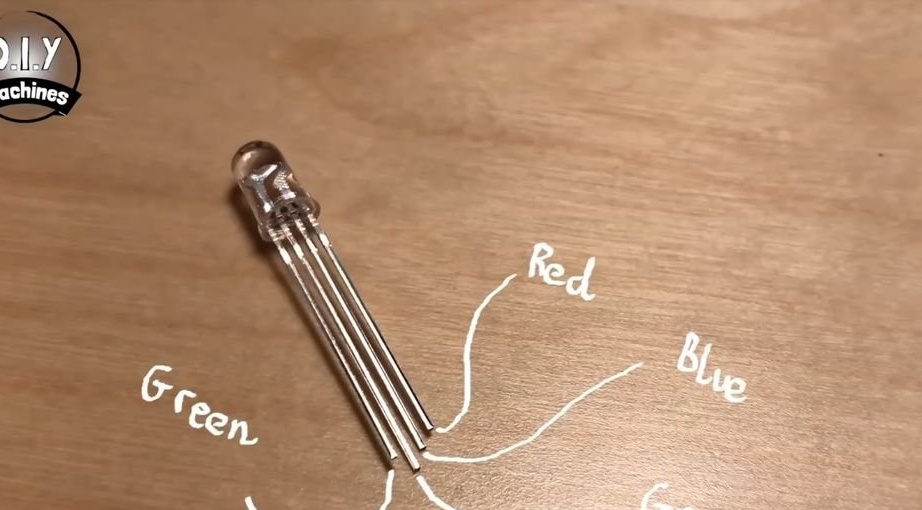
- RGB LED;
-Draad;
-Soldeeraccessoires;
-Izolenta;
-Lijmpistool;
-Batterijcompartiment;
-Connectors;
-Batterijen;
-Computer met software;
- Houders voor flessen;
Ventiel
-Flessen;
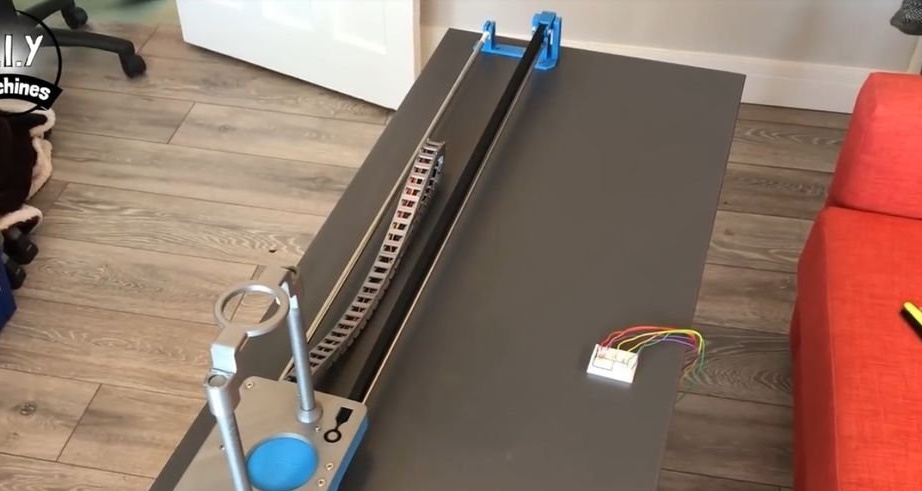
Stap één: de tafel
Eerst verzamelt de meester de tafel. Tafelgrootte 120 * 45 cm Tafelblad dikte 18 mm.


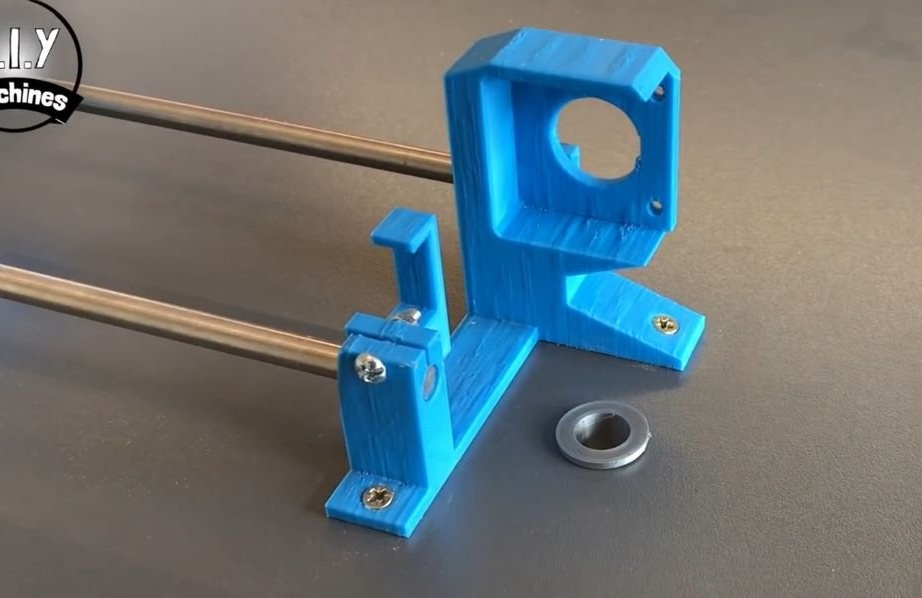
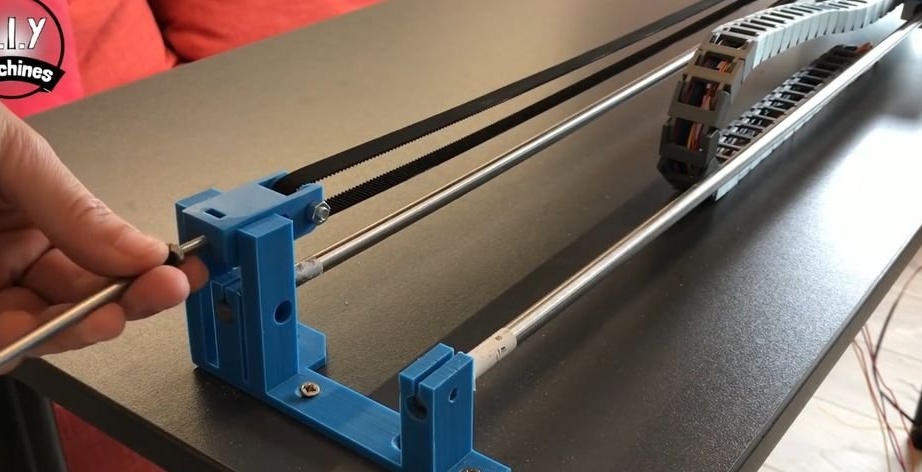
Stap twee: spanner
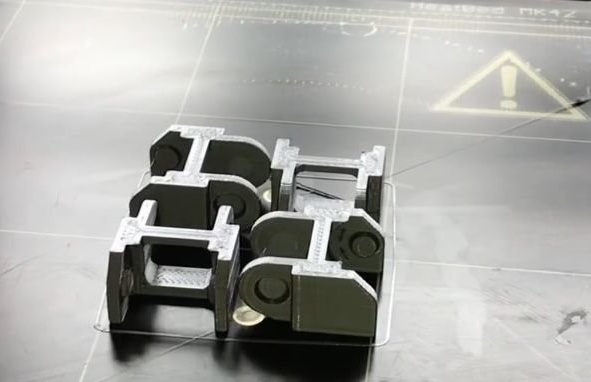
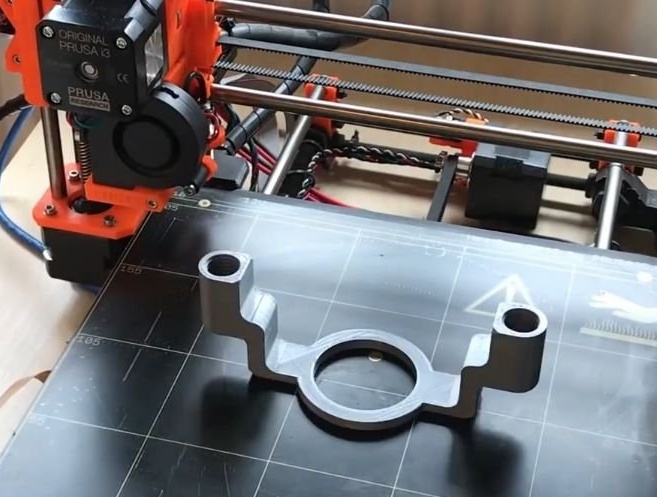
Bestanden voor het printen van onderdelen kunt u hieronder downloaden.
3D-afdrukbestanden.
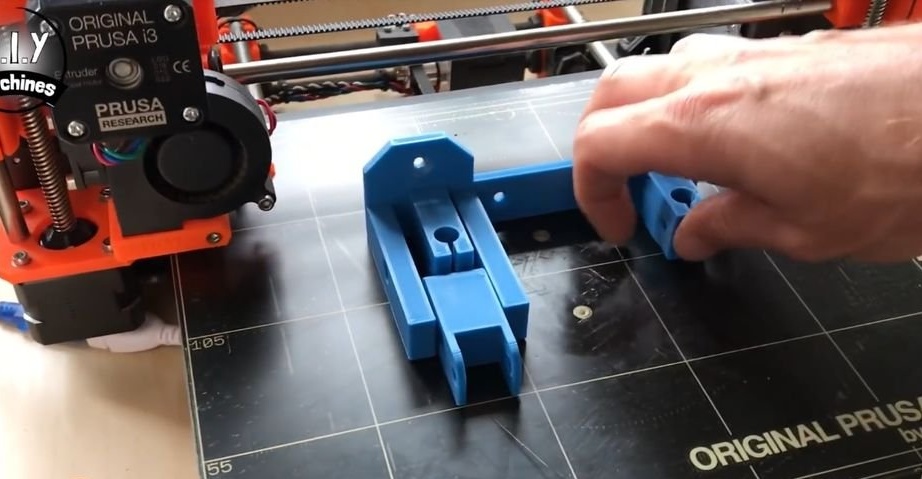
Nu moeten de eerste twee details "idler.stl" en "Rod_Clamp_V5.stl" worden afgedrukt.
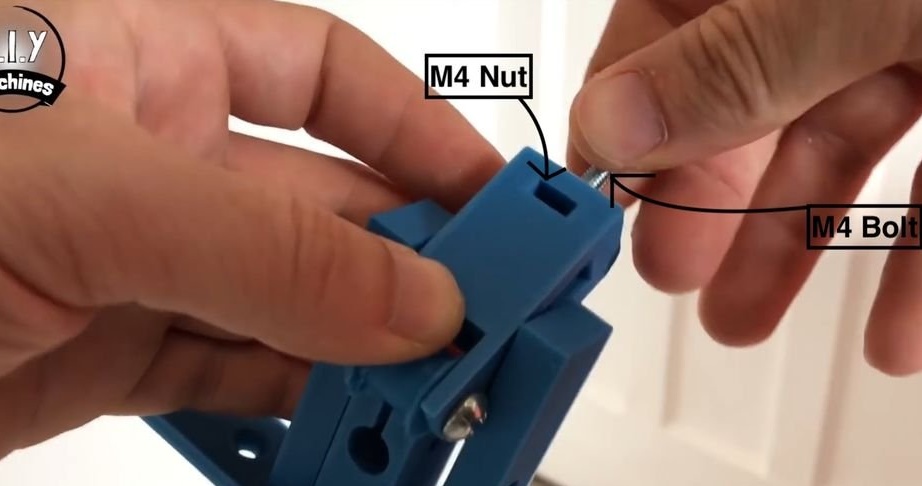
Na het printen is het noodzakelijk om de spanrol aan de stuurpenklem te bevestigen met een lange M4 bout en moer. Stevig vastklemmen is niet nodig, omdat de rol vrij moet kunnen draaien.
Vervolgens worden de twee delen aan elkaar bevestigd.
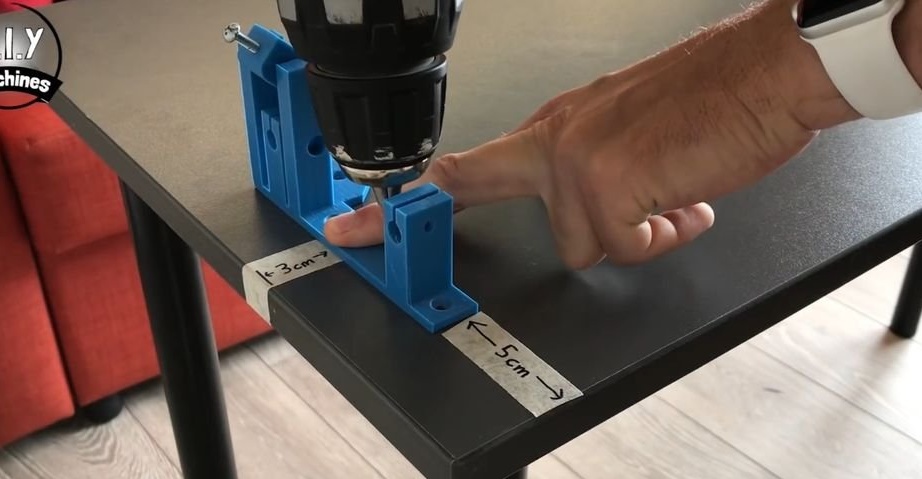
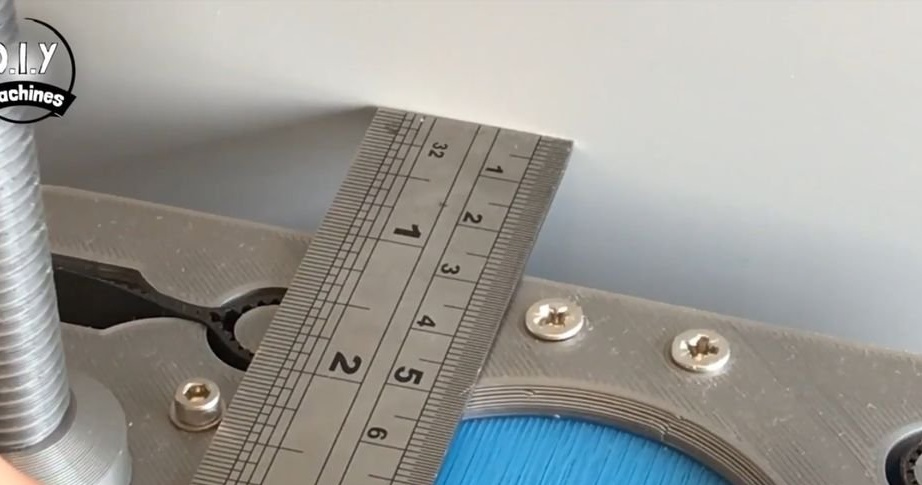
Markeert op een tafel 3 cm van het linker korte uiteinde en 5 cm van de voorkant en zet de spanner vast.

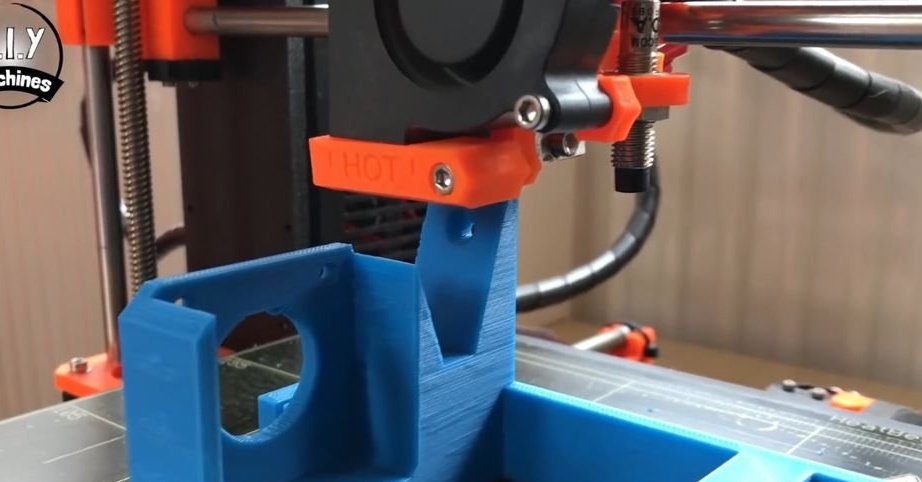
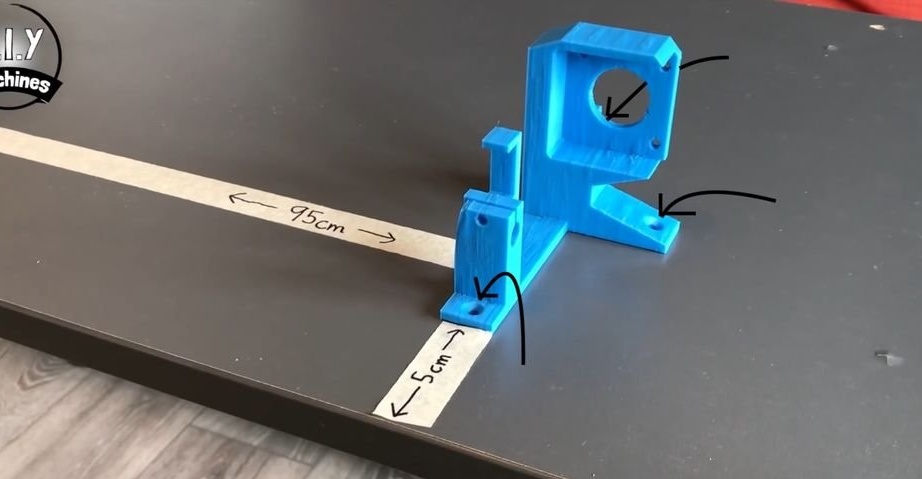
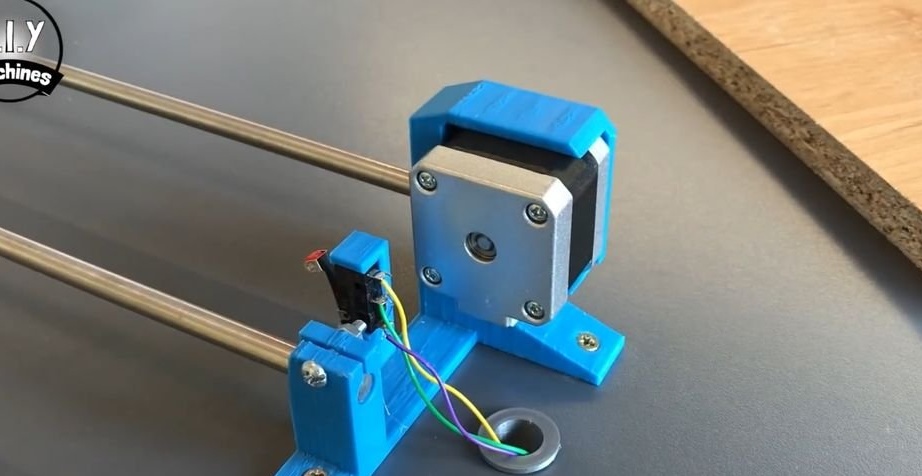
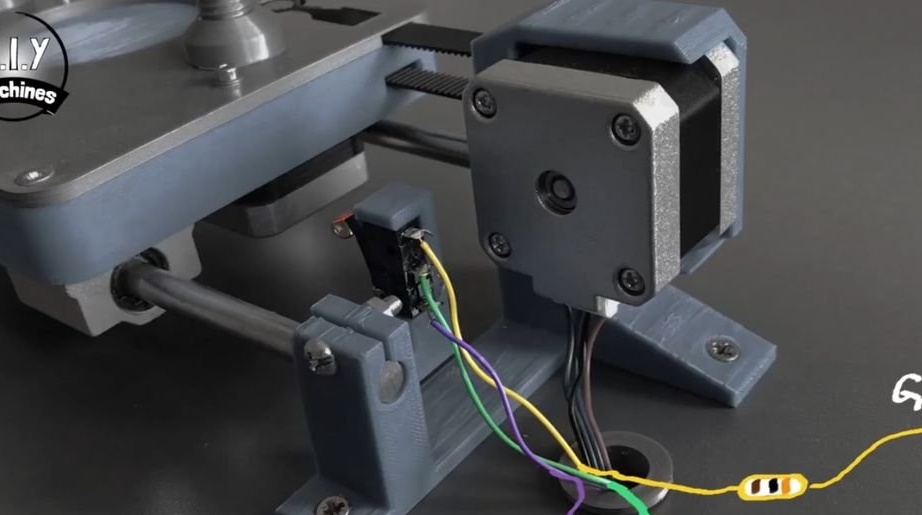
Stap twee: Engine Mount
Drukt de motorsteun af, bestand "X_Axis_Motor_Mount.stl". Wordt op het tafelblad bevestigd op een afstand van 95 cm van de spanner en 5 cm van de rand van de tafel.
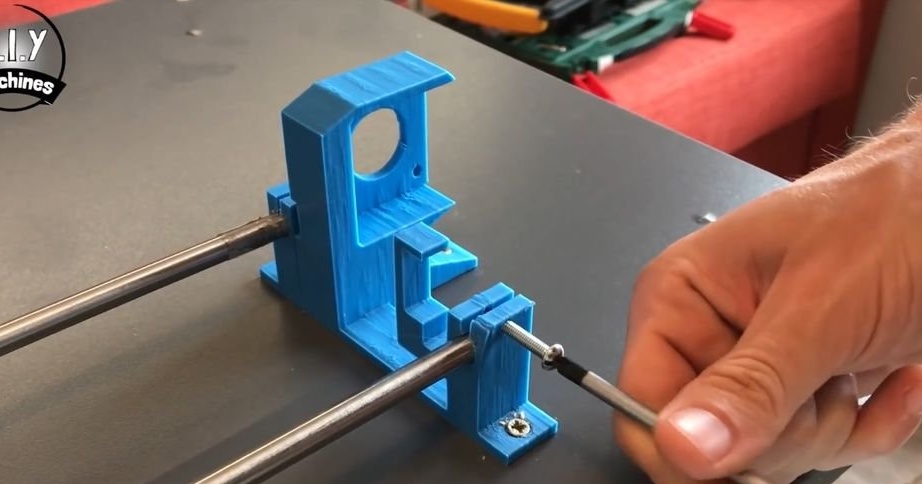
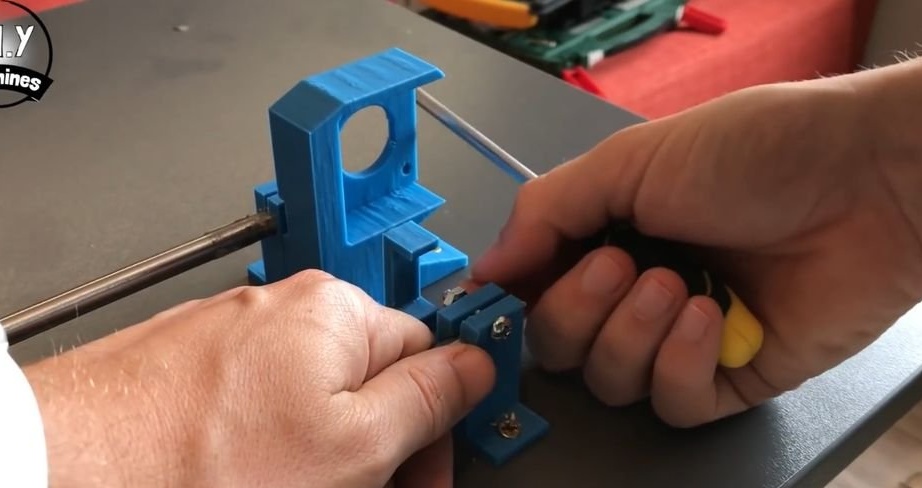
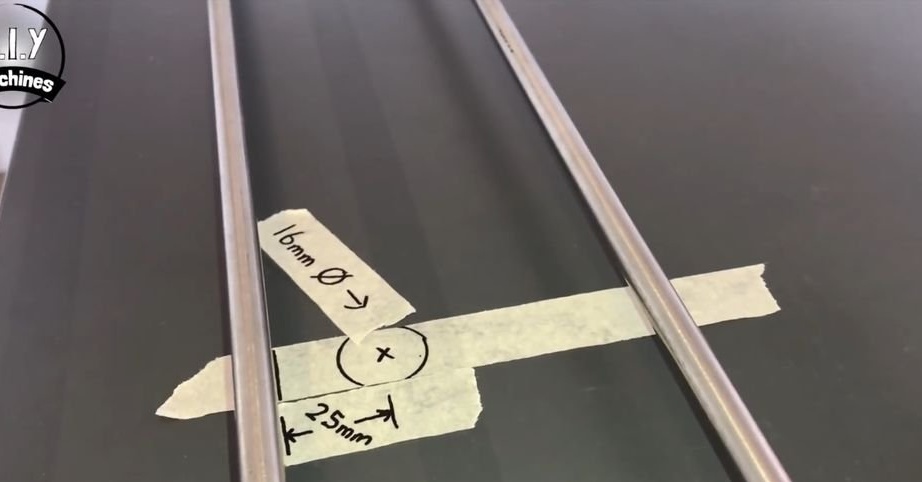
Stap drie: gidsen
Stelt gidsen in. De lengte van de hengels is 1 meter.
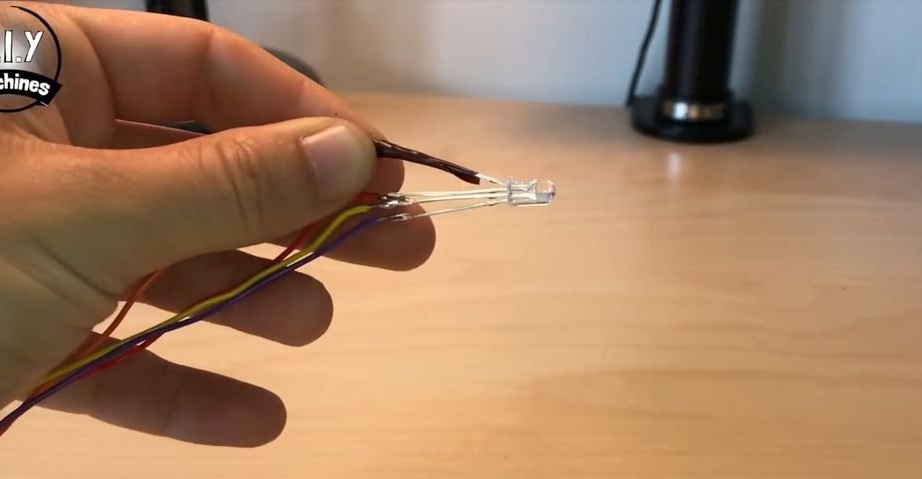
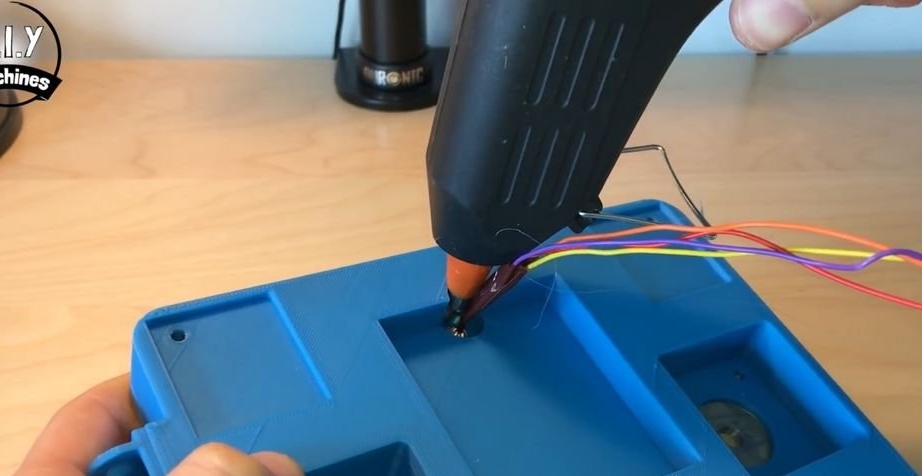
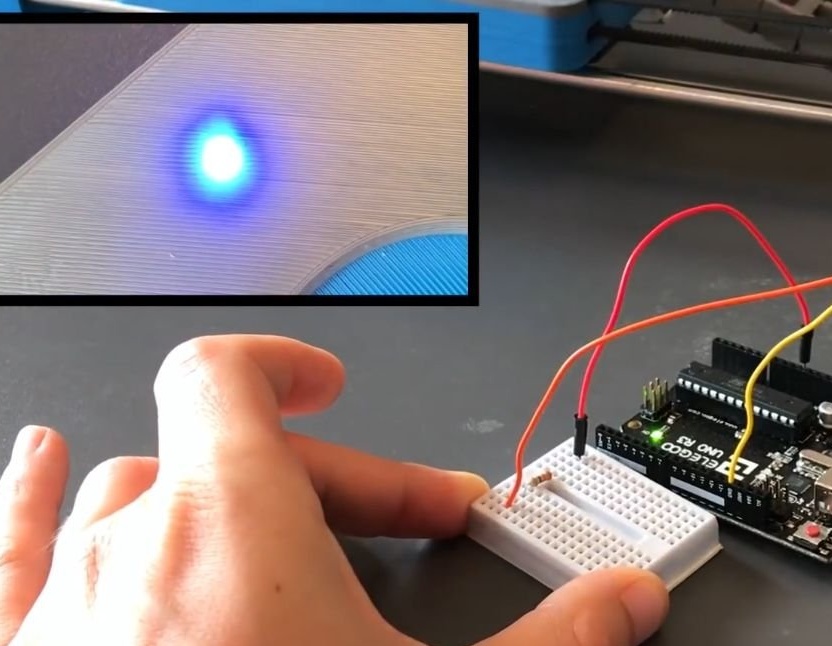
Stap vier: LED
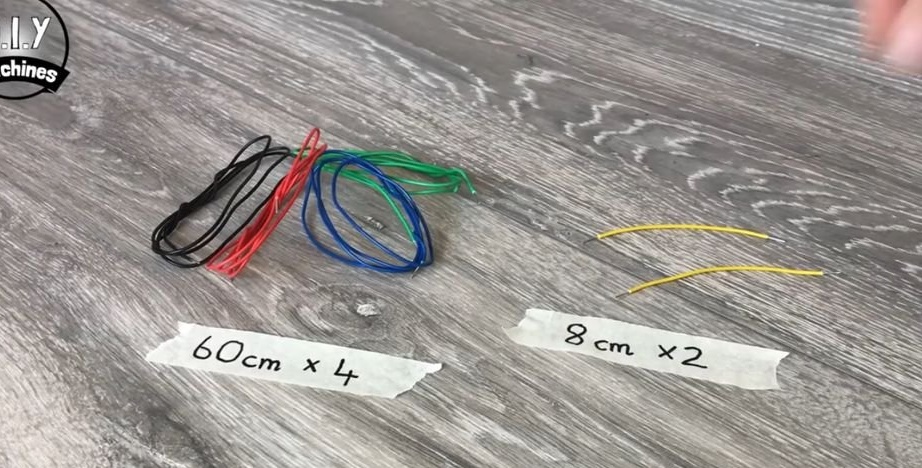
De master gebruikt de RGB-LED ter indicatie. Soldeer 180 cm draden van verschillende kleuren aan elke poot. De kruising isoleert.




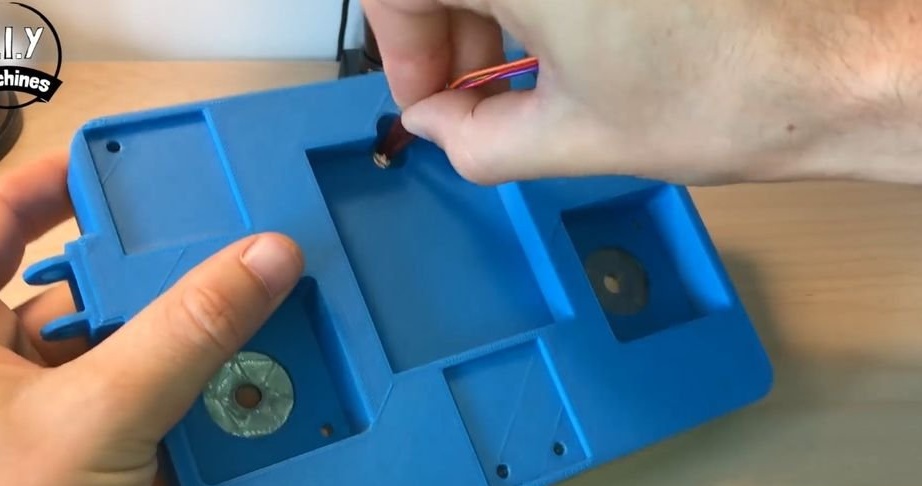
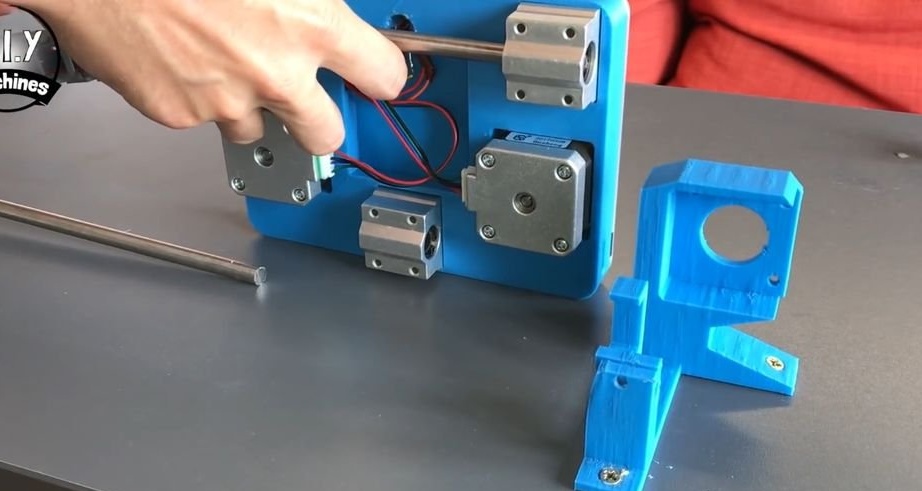
Stap vijf: platform
Drukt het onderdeel 'slider_base_v3.stl' af. Fixeert een LED. Installeert stappenmotoren.
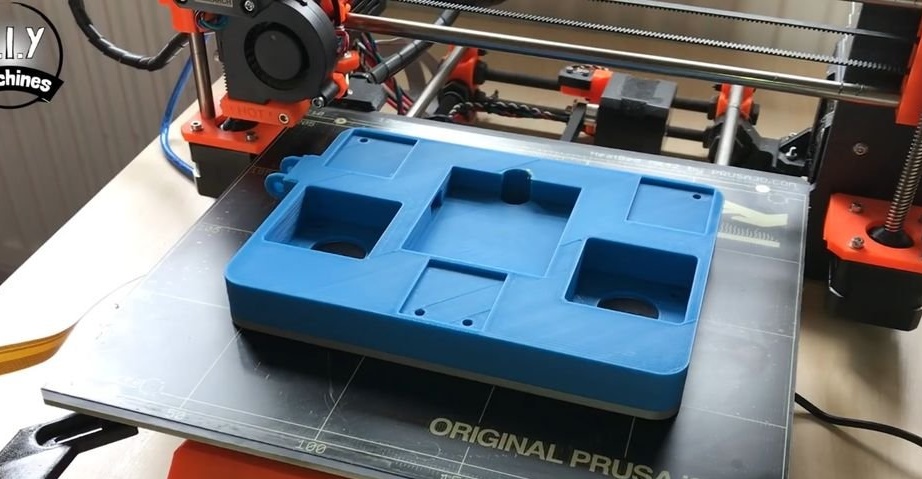

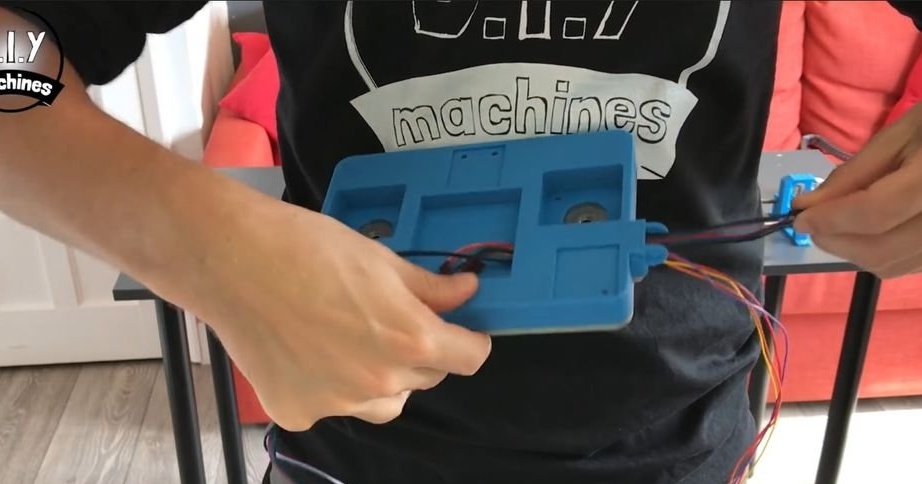
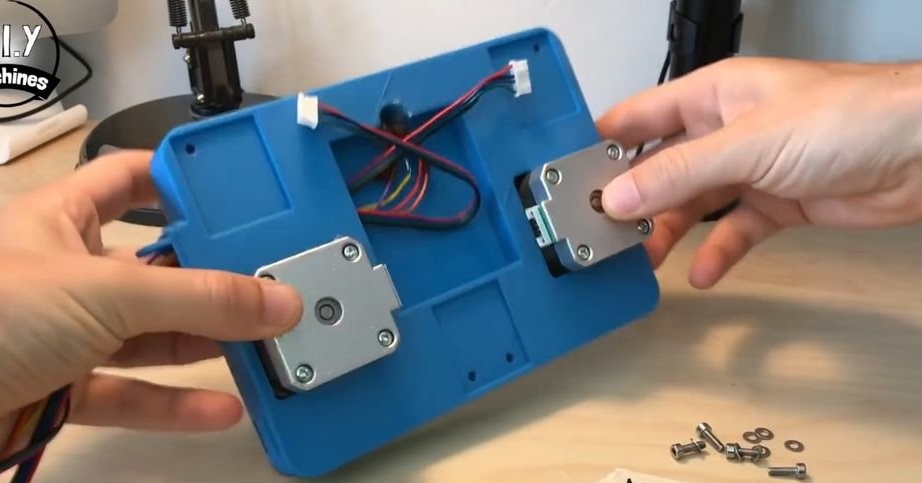
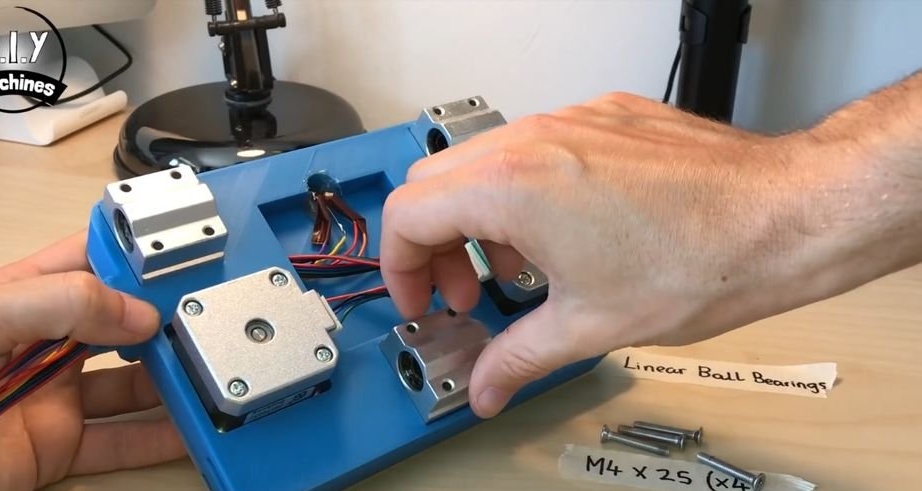
Installeert lineaire lagers.
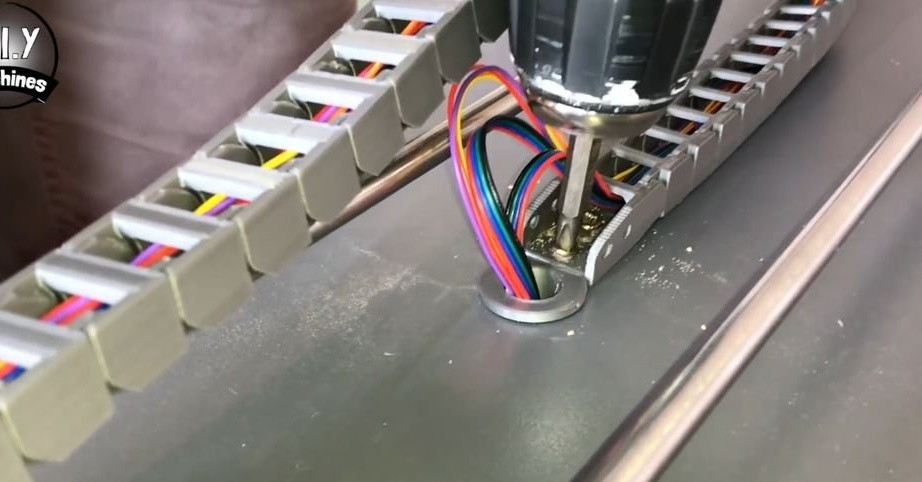
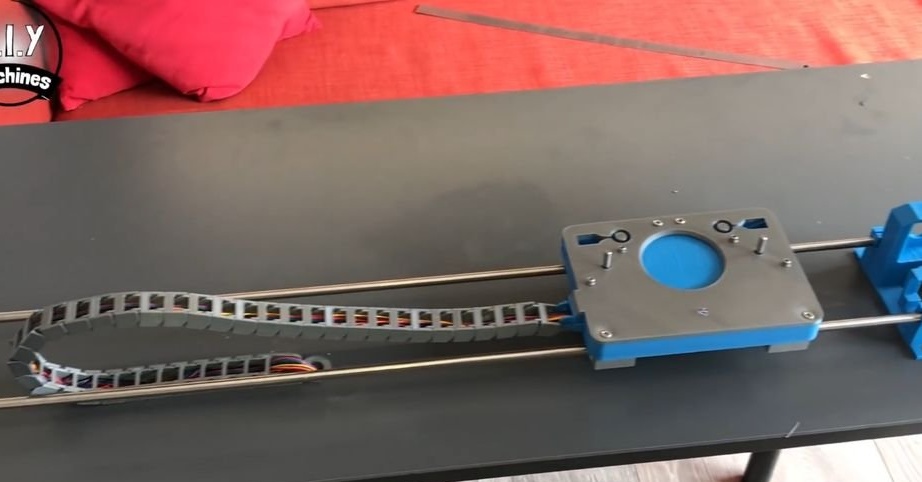
Stap zes: kabelkanaal
Het kabelkanaal voor het apparaat bestaat uit afzonderlijke segmenten die in één circuit zijn aangesloten.In het circuit worden draden gelegd. De ketting is verplaatsbaar en buigt indien nodig. Kettingsegmenten worden ook op de printer afgedrukt.


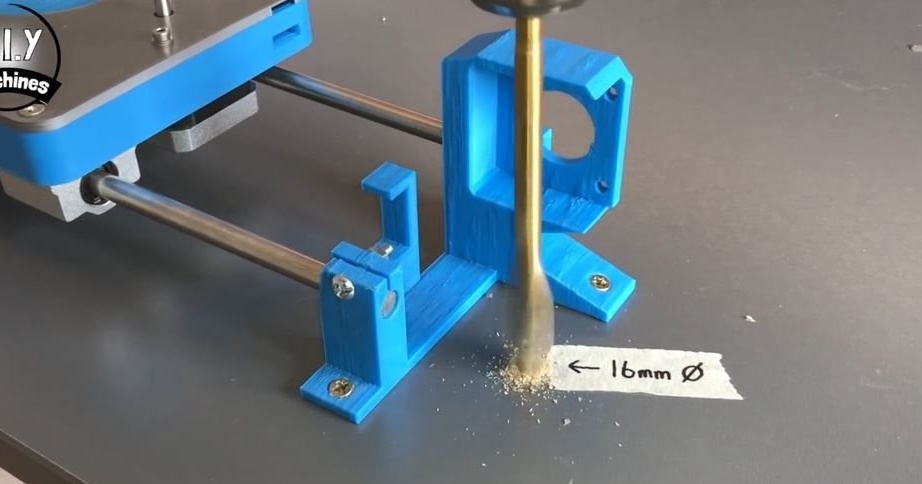
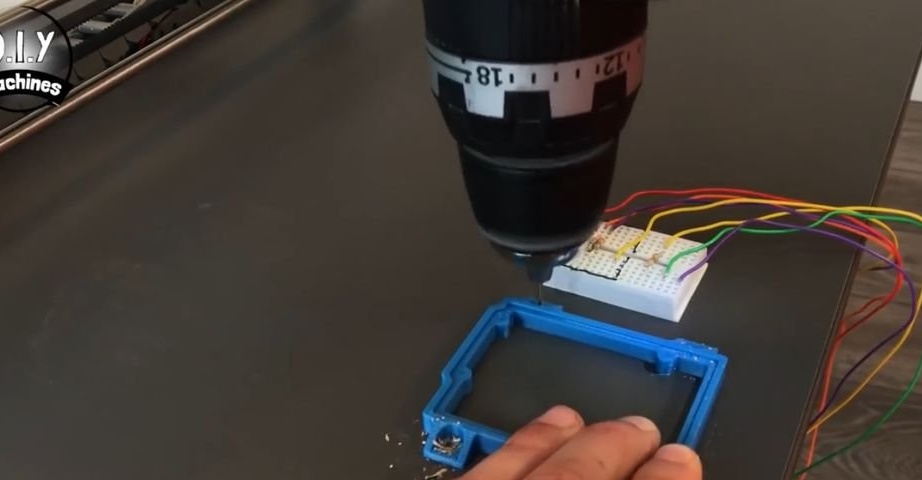
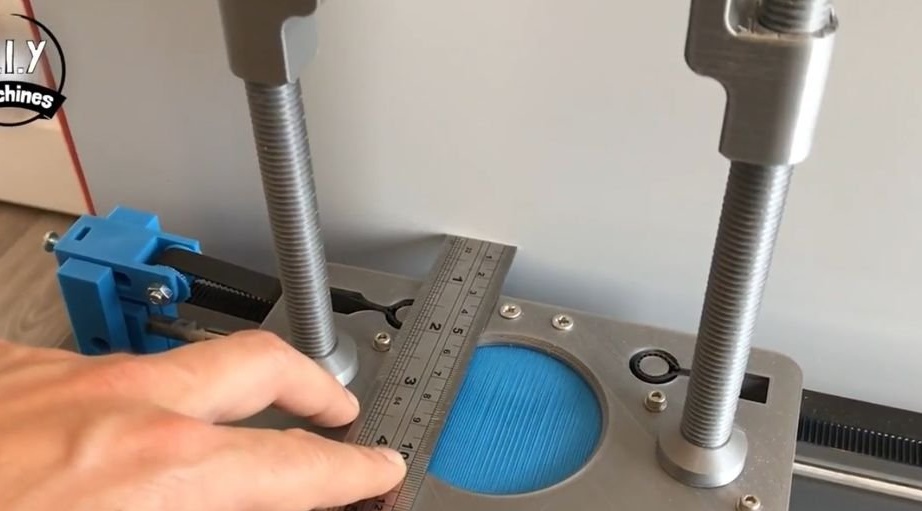
Op een afstand van 25 mm van de uiterste geleider en 47 cm van de spanner, boort een gat van 16 mm. Voegt de hoes "Table_Tidy.STL" in het gat in. Bevestigt het kabelkanaal aan het ene uiteinde op het platform, het tweede aan het aanrecht naast de huls. Rekt draden uit.



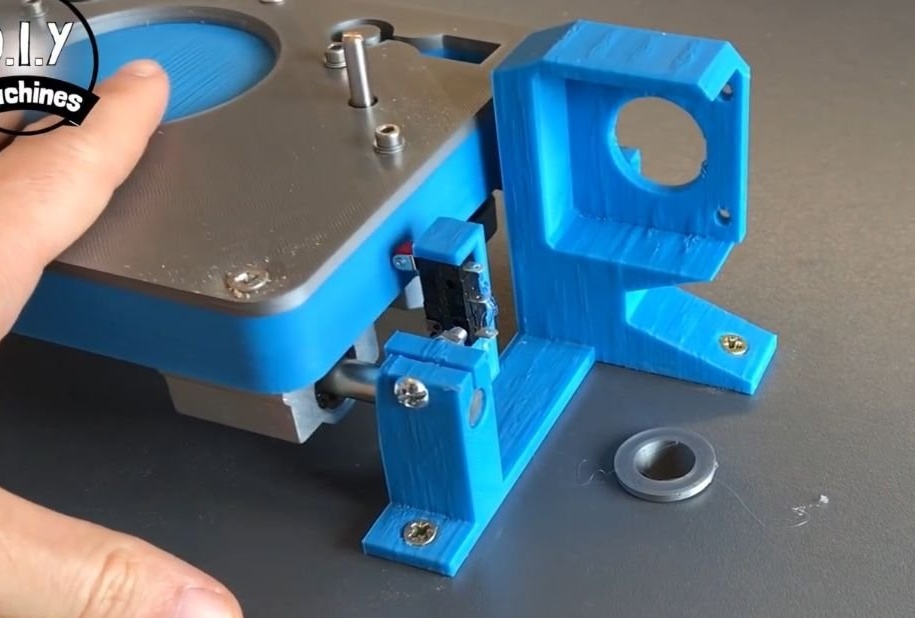
Zevende stap: wisselen
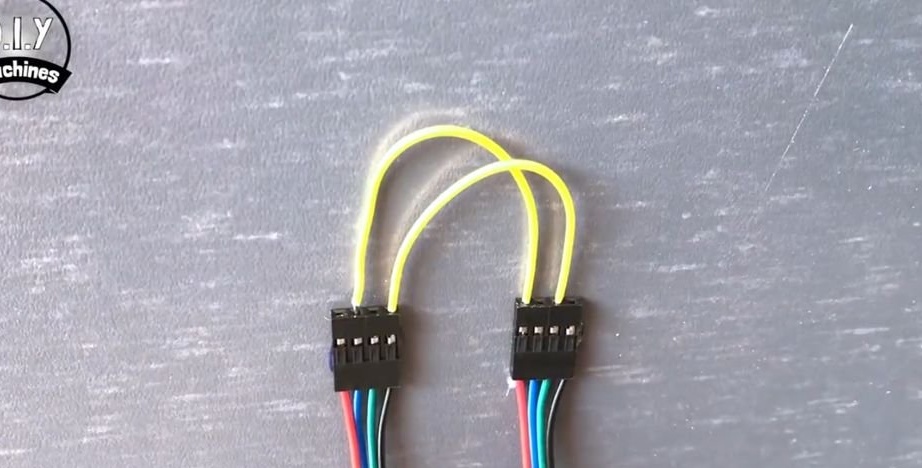
Naast de motorsteun wordt nog een gat van 16 mm geboord. Voegt er een mouw in. Bevestigt de trailer aan de houder. Soldeer aan zijn contacten voor 1 meter draad.

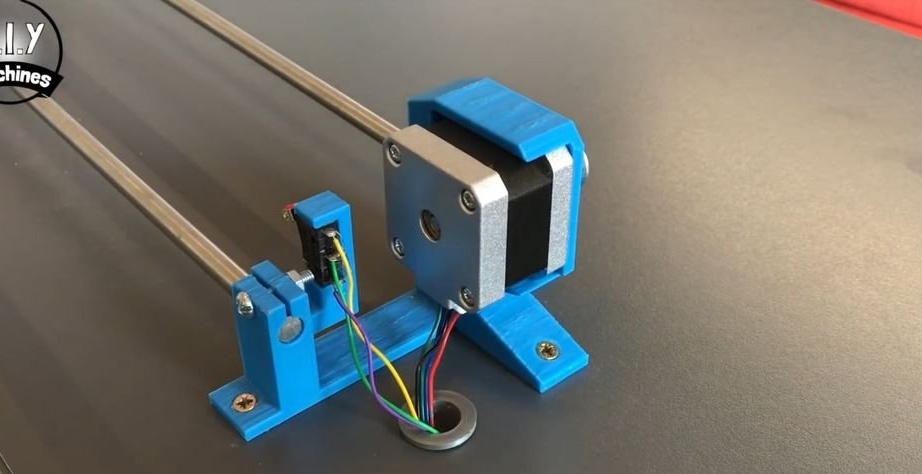
Stap acht: X-asmotor
Zet motor vast om te monteren.

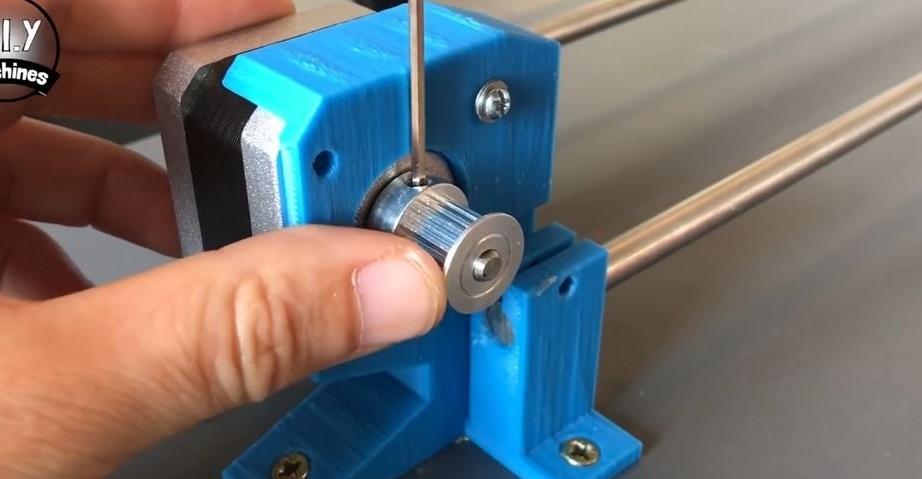
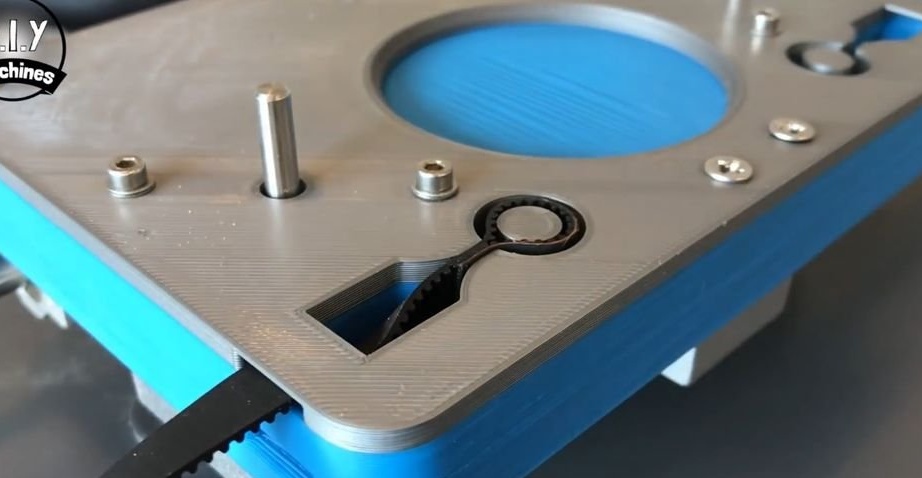
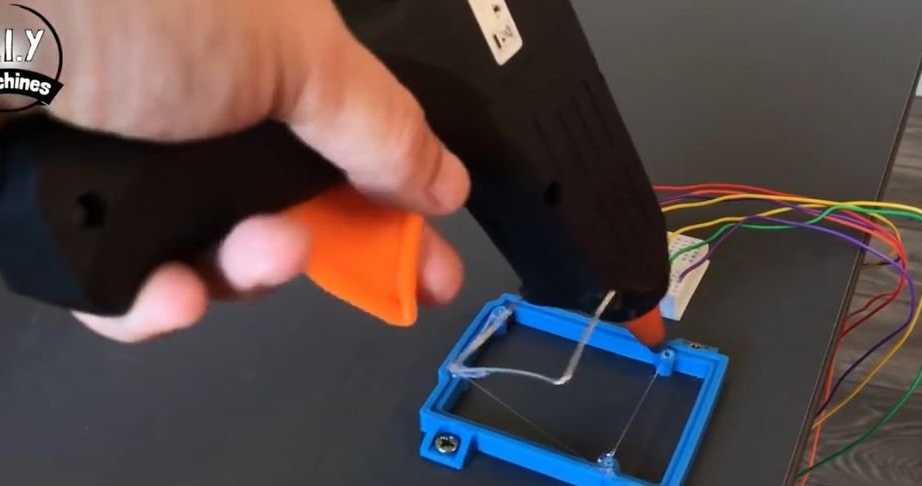
Stap negen: riem
Bevestigt de katrol aan de motoras. Bevestigt het uiteinde van de riem aan de platformhouders. Trekt de riem door de riemschijf en door de spanrol. Bevestigt het tweede uiteinde aan de houders. Indien nodig kan de riemspanning worden aangepast door de schroef aan te draaien of los te draaien.







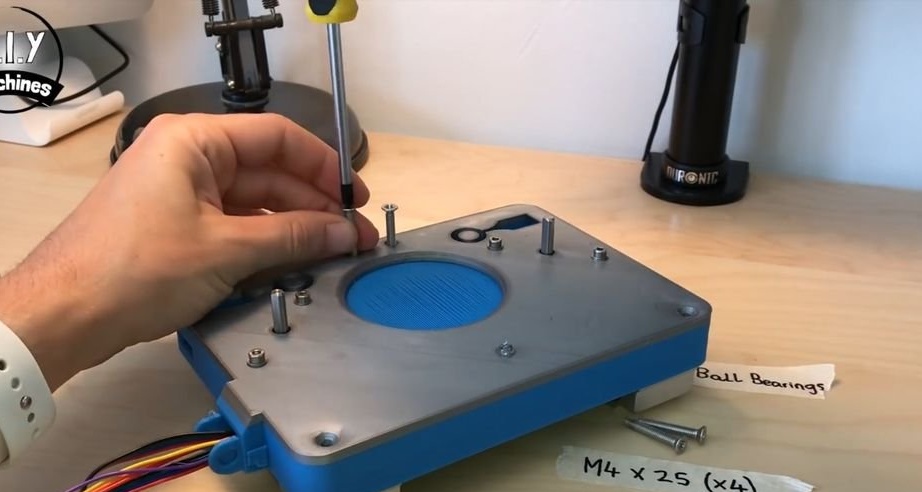
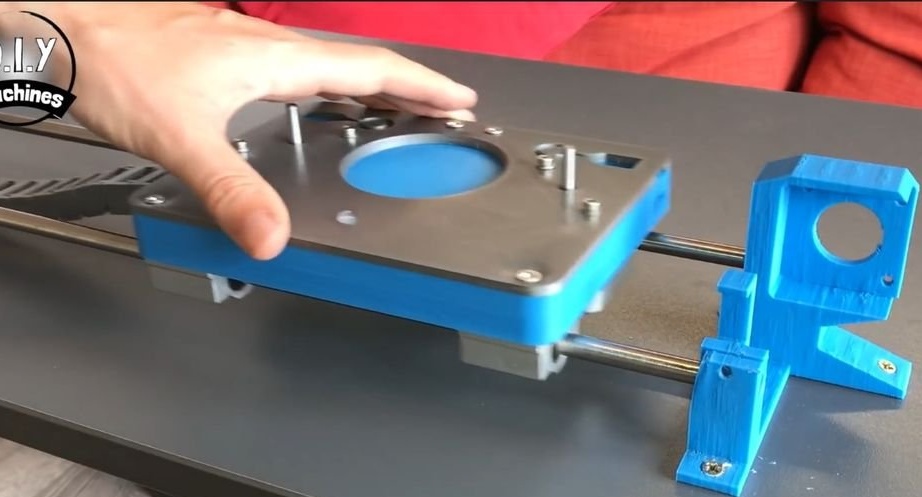
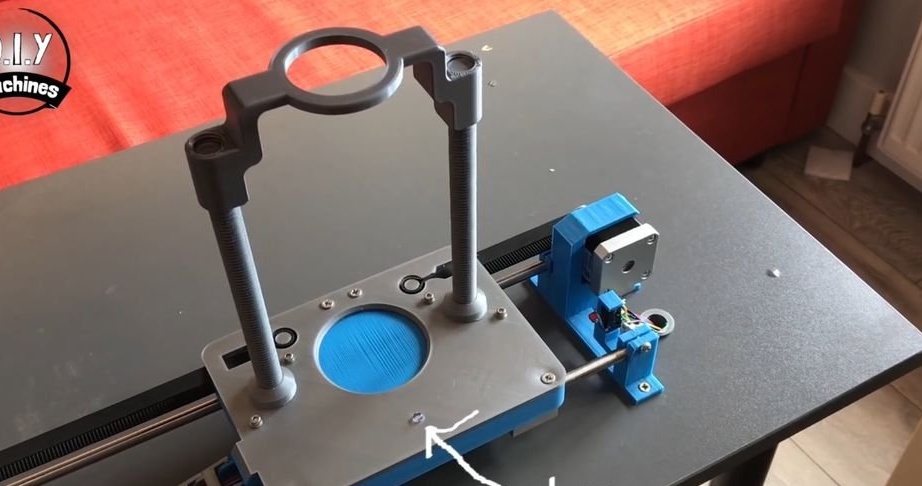
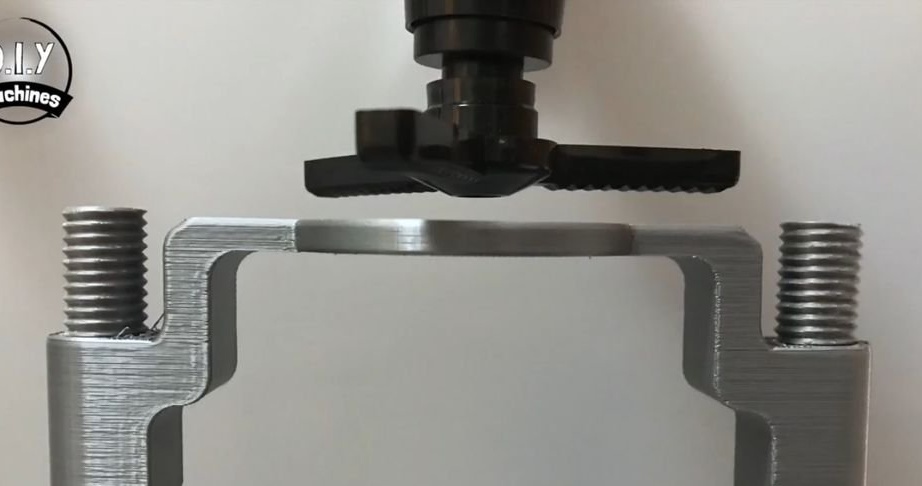
Stap tien: bekerhouder
Drukt twee draadstangen main_rod2.3.STL en houder Dispenser_Paddle_V2.STL af. Wordt op een platform bevestigd.



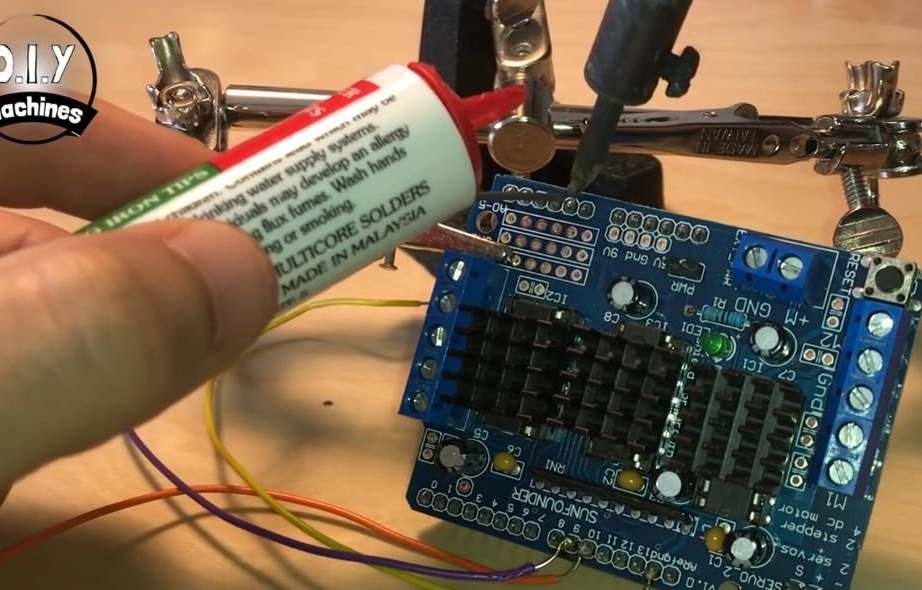
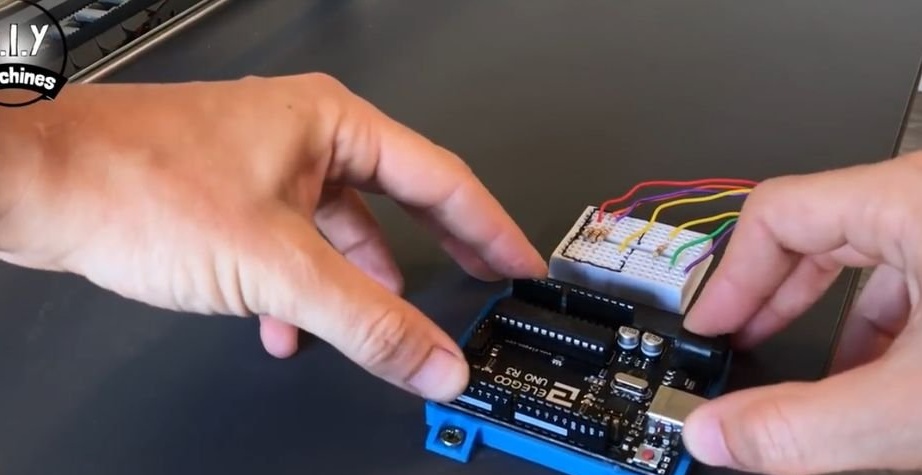
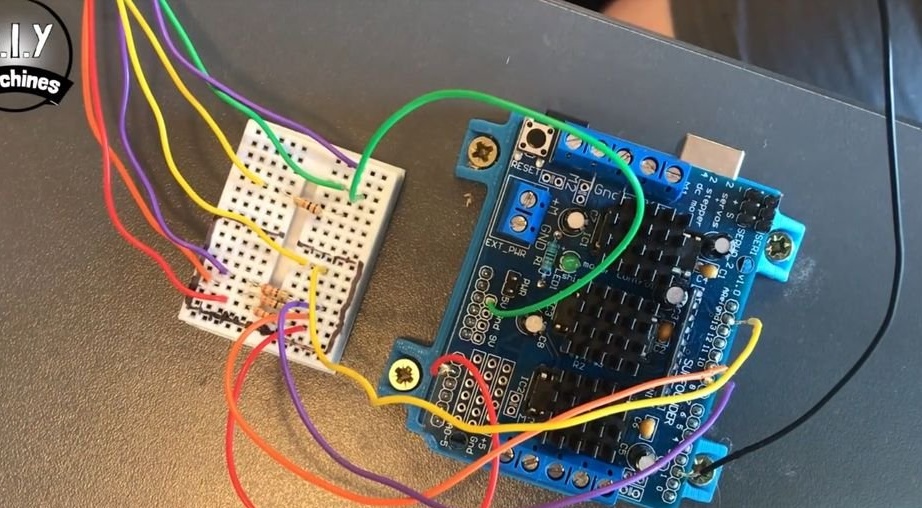
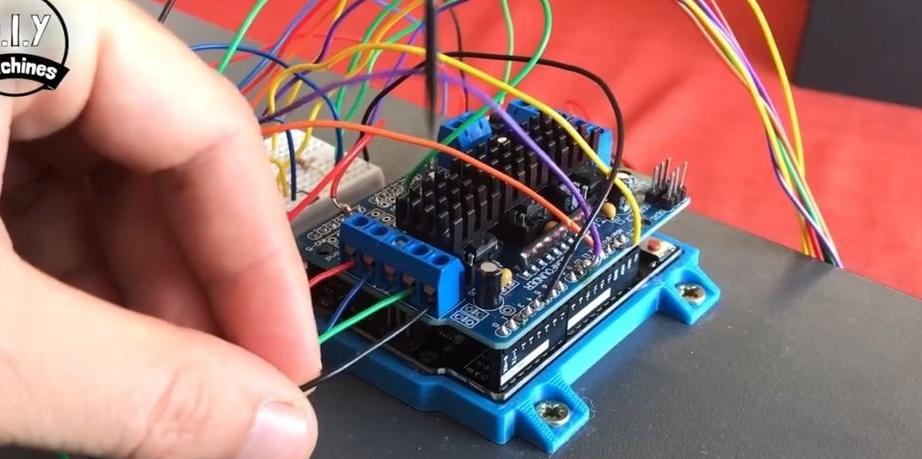
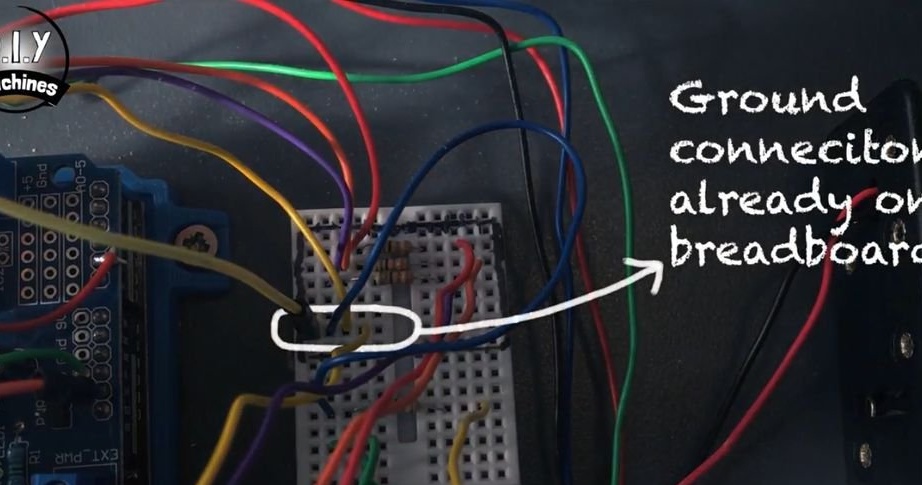
Stap elf: indicator, trailer, breadboard
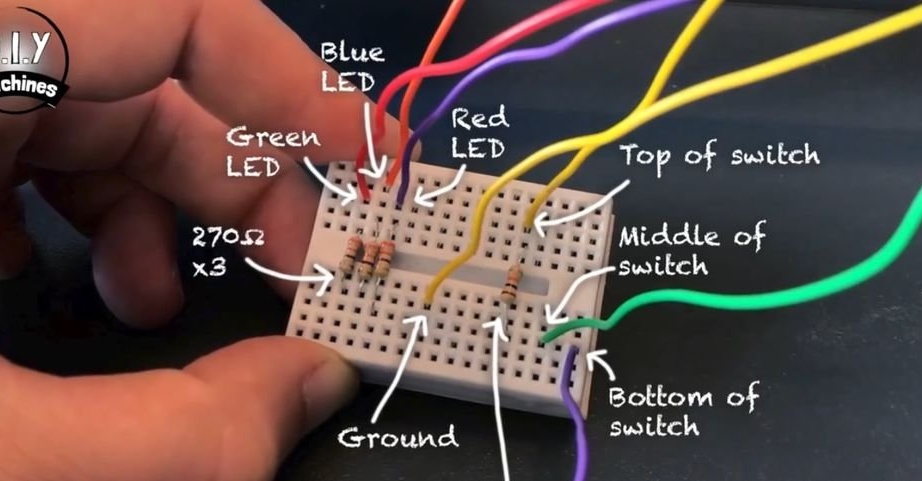
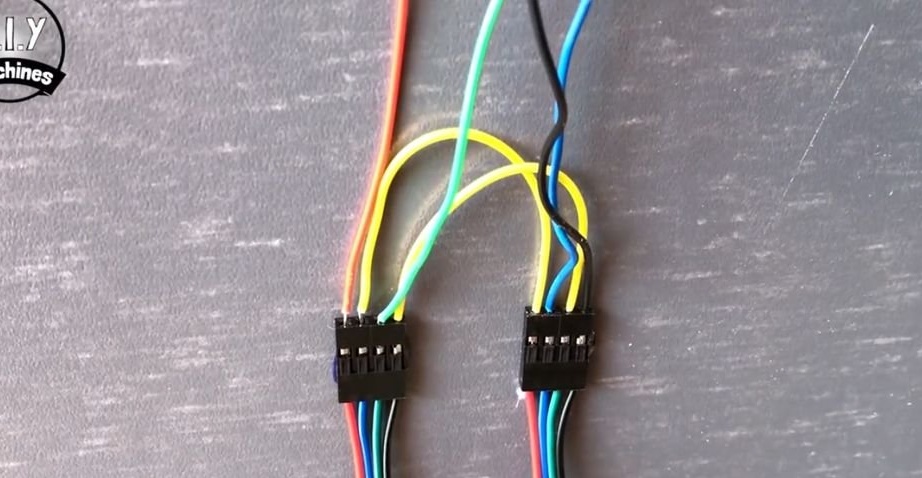
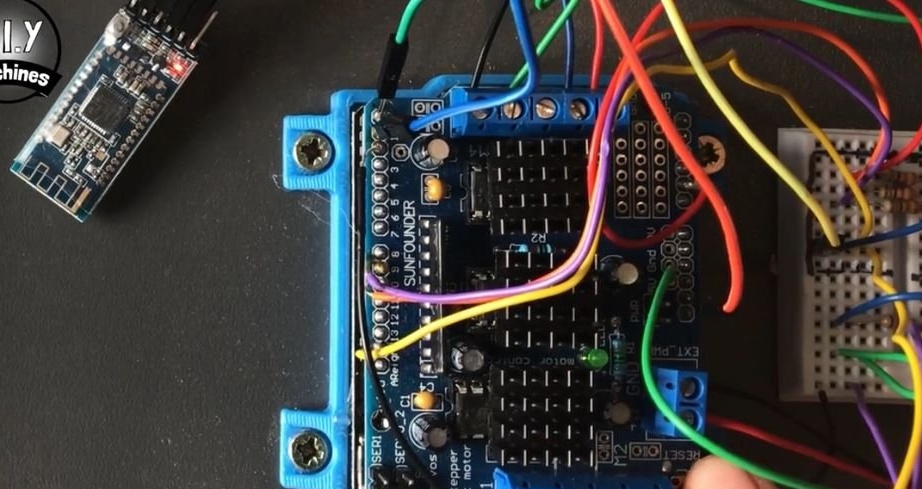
RGB LED, heeft vier poten. Eén been is gebruikelijk en drie in kleur. De meester neemt nog vier draden, elk ongeveer 15 cm lang, en verkoopt ze als volgt (door de kleuren van de LED-gloed) naar de module van de motordriver:
Rood voor pin D9
Blauw om D10 vast te zetten
Groen voor pin A1
De kathode naar de GND-pin.
Het verbindt de trailer: het bovenste contact is GND, het middelste contact is 5 V, het onderste contact is uitgang nr. 2.
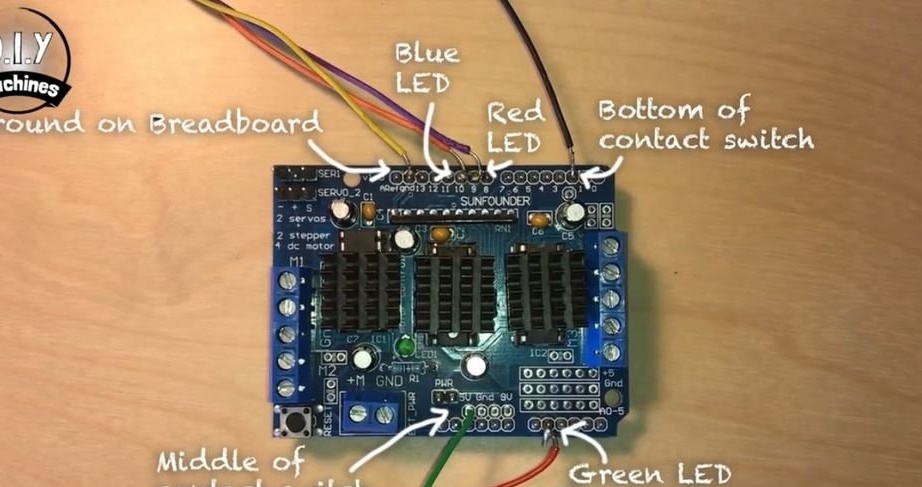
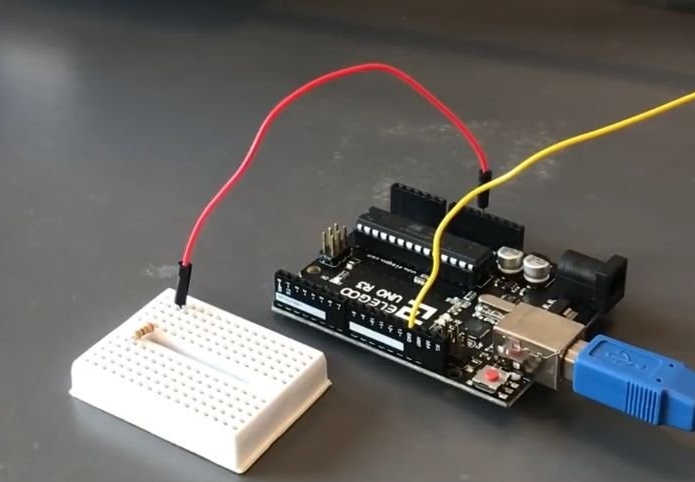
Vervolgens monteert u alles op een breadboard (zie foto). Bevestigt het bord aan de tafel.
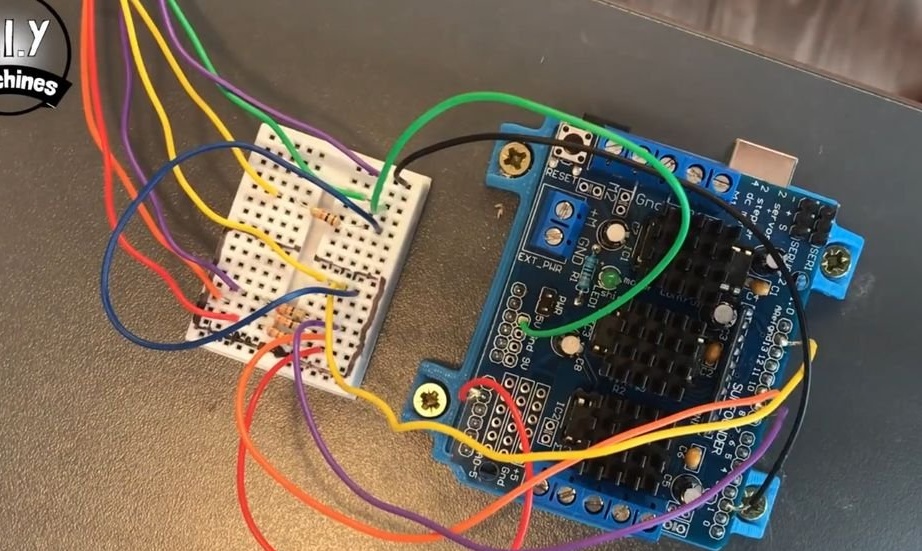
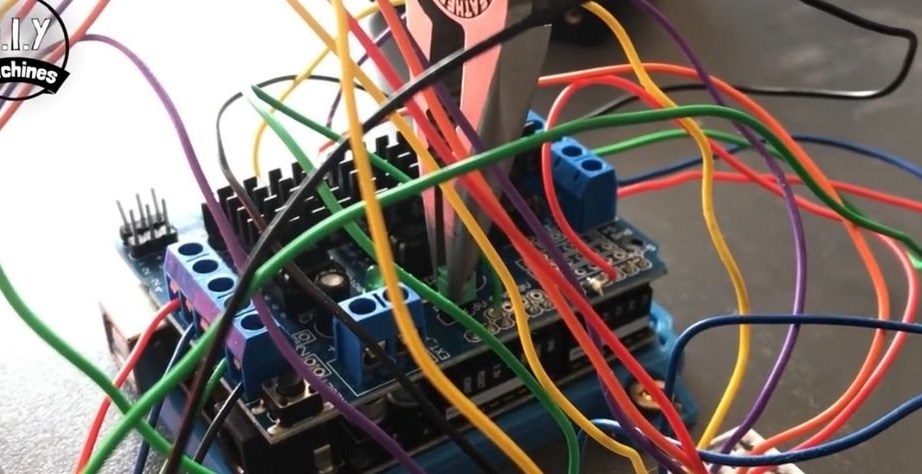
Stap twaalf: Arduino
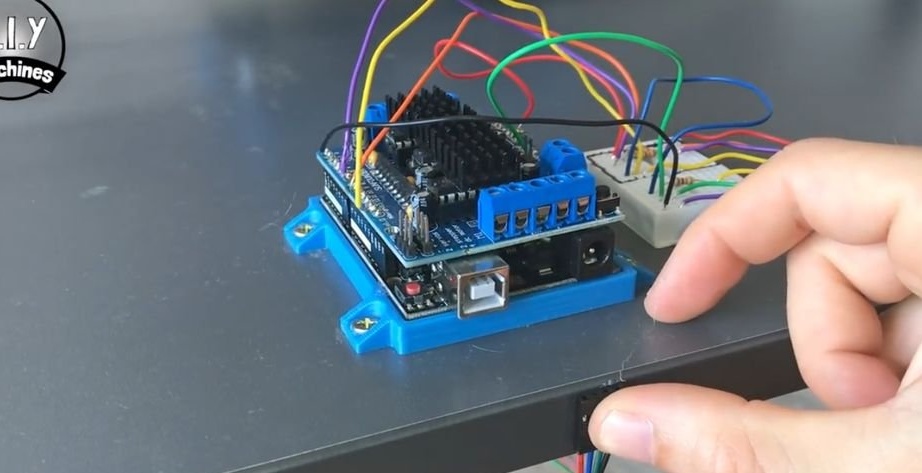
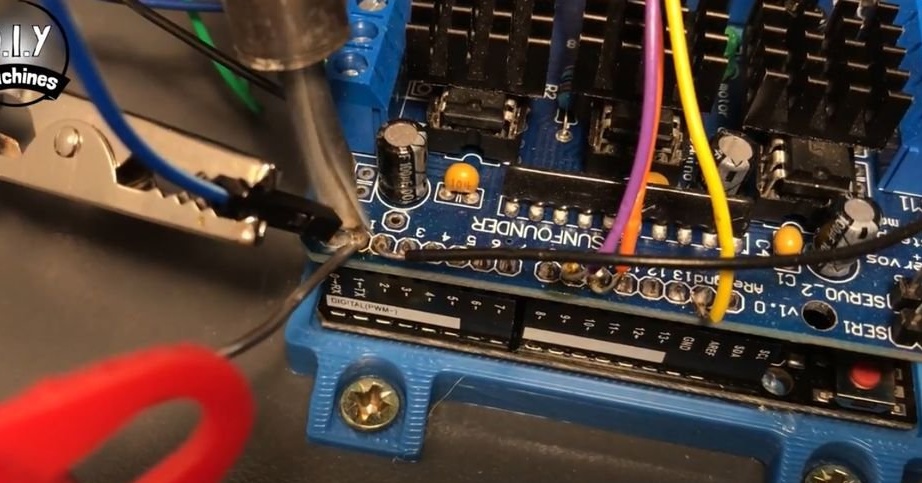
Print montageplaat voor Arduino. Bevestigt de plaat aan de tafel. Wordt op een bord Arduino vastgemaakt. Installeert een engine driver module op de Arduino.
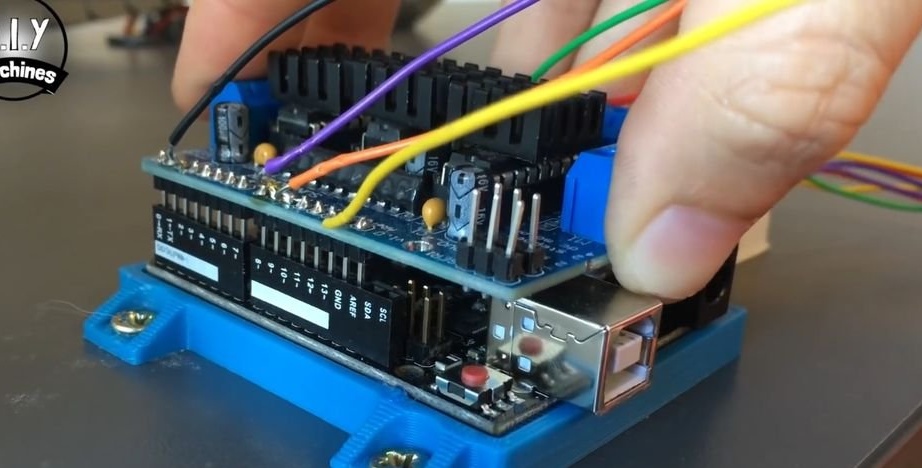
Verbindt de draden van de bestuurder met het breadboard, zoals op de foto.
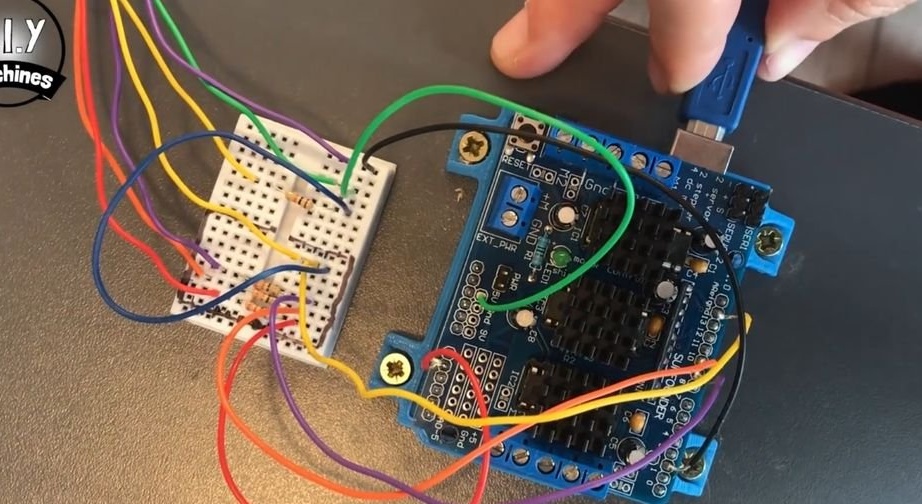
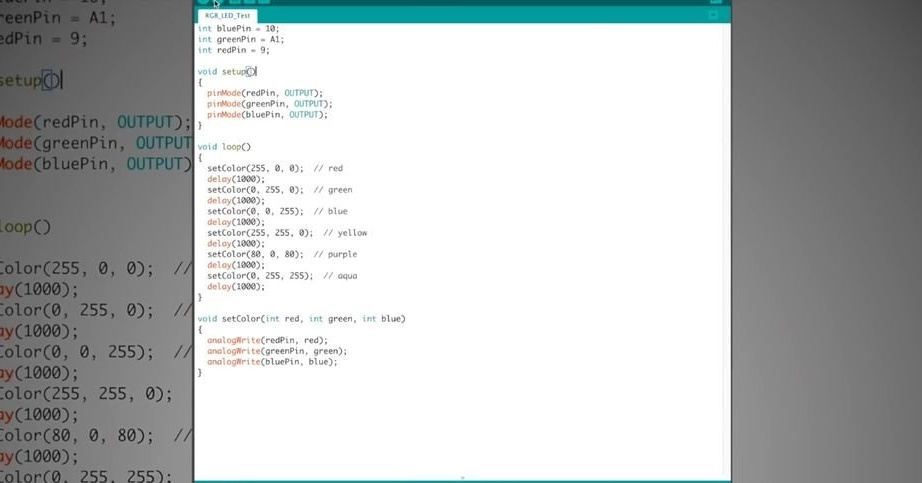
Stap dertien: Download code
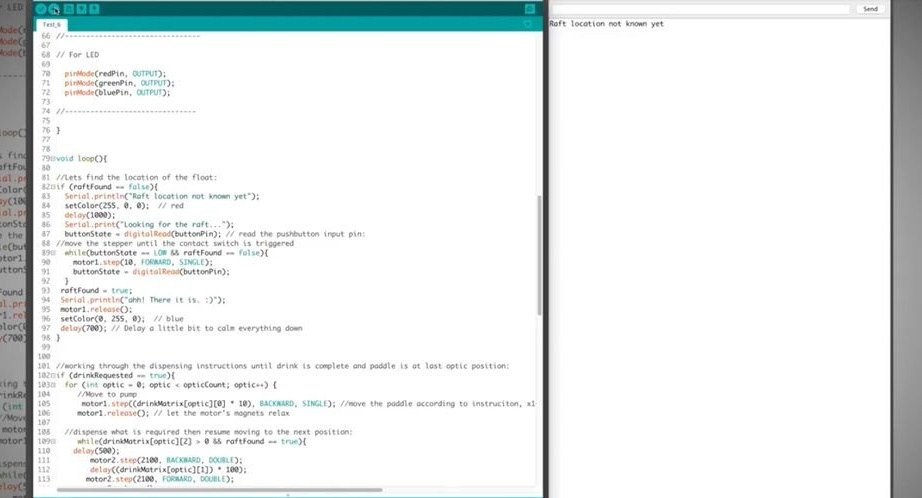
Verbindt Arduino met een pc en downloadt de code. Code is te vinden hier.
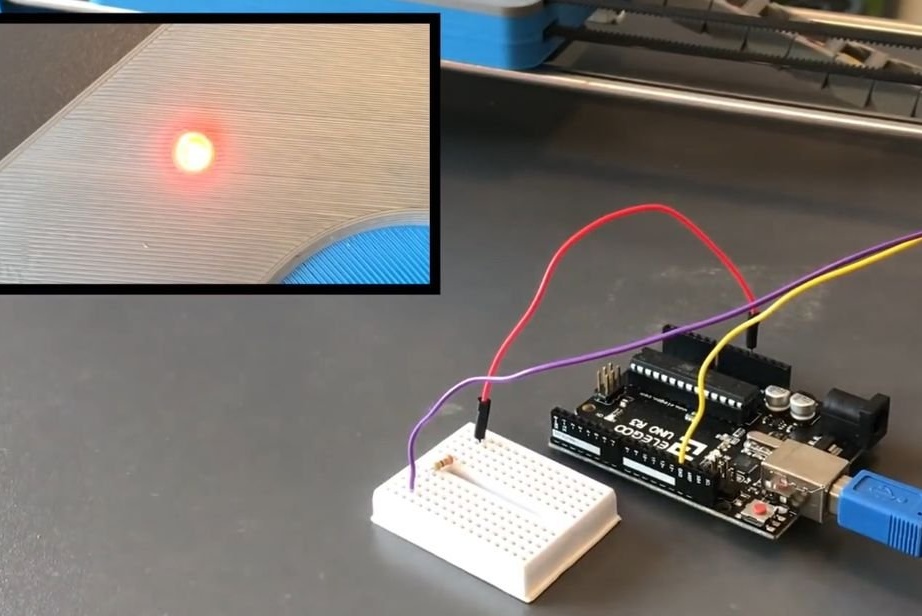
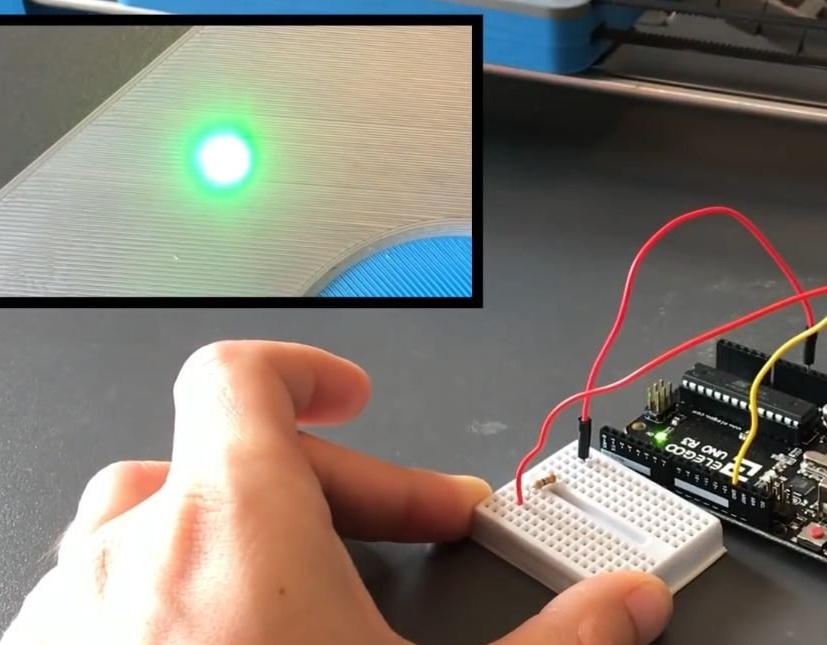
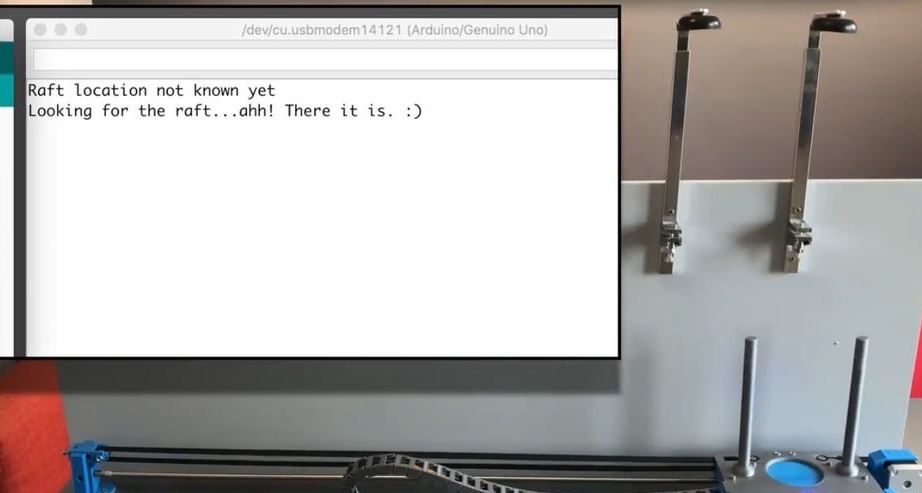
Voert de LED-testcode uit. De LED moet in verschillende kleuren oplichten.
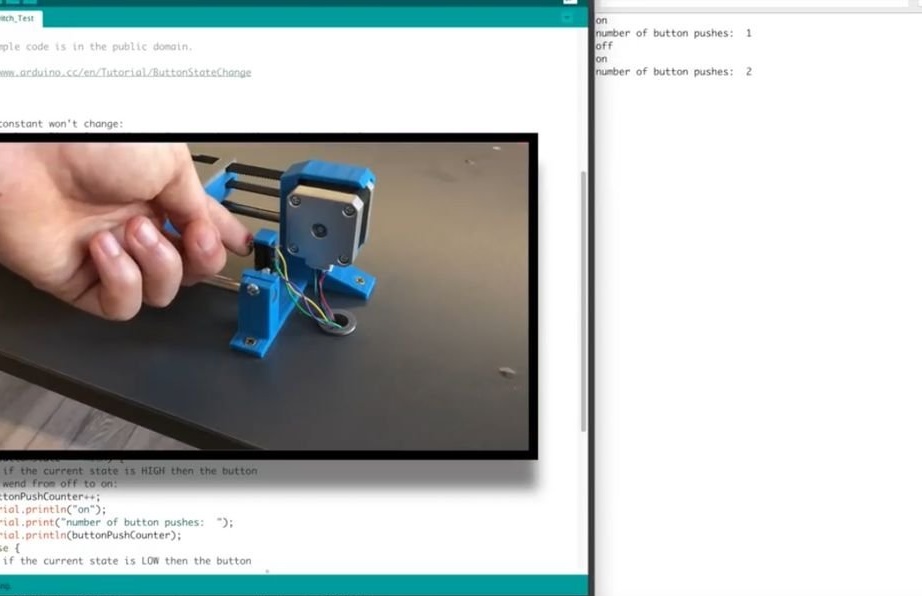
Het volgende te downloaden script is "Contact_switch_test". Zodra het is geladen, moet elke druk op de eindschakelaar op de monitor worden weergegeven.

Stap veertien: de X- en Z-motoren aansluiten
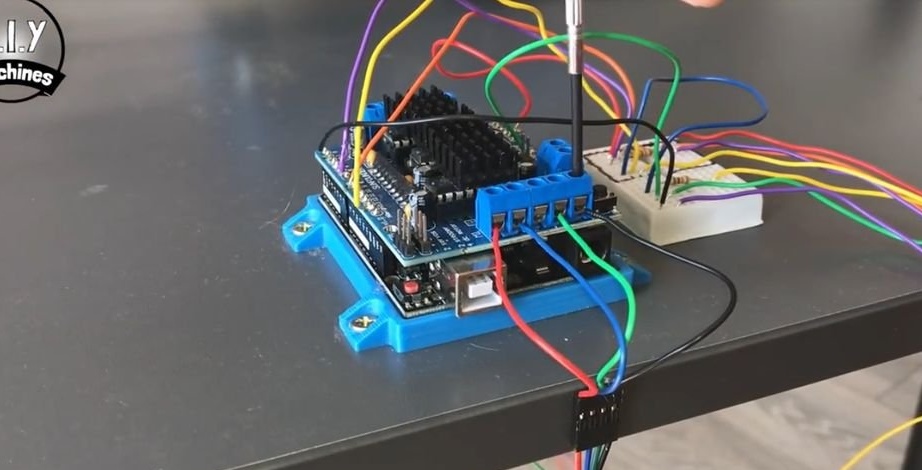
Bevestigt de connector die uit de motor X komt via het breadboard op de tafel. Verbindt met driver draden.
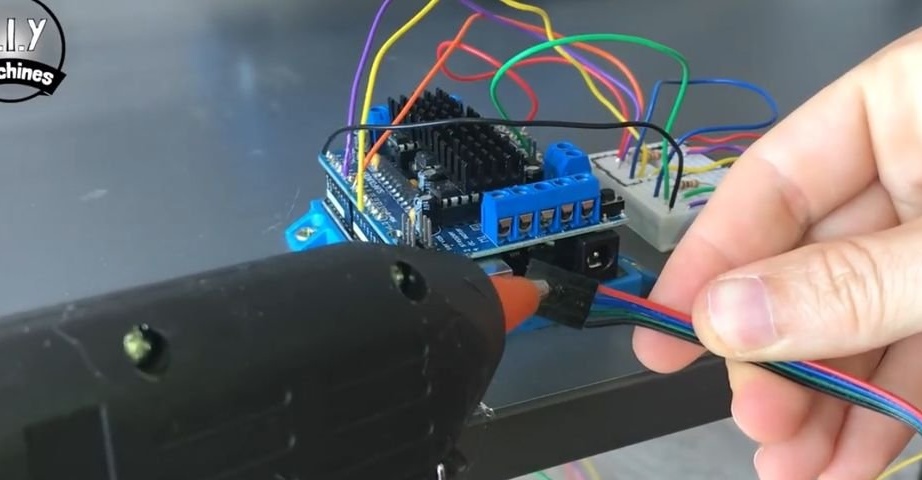
Verbindt Z-as stappenmotoren.
Stap vijftien: batterijcompartiment
Verwijdert een jumper op een module. Verbindt het batterijvak.
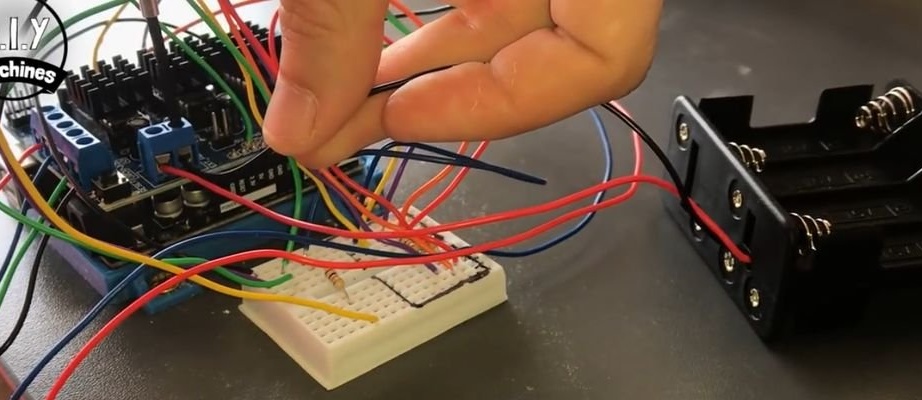
Nu kunt u "test 1" uitvoeren. De rode LED moet oplichten en het platform moet de eindschakelaar bereiken. Vervolgens wordt de LED groen.
Stap zestien: flessenhouders
Met behulp van beugels wordt de achterwand van MDF beveiligd.




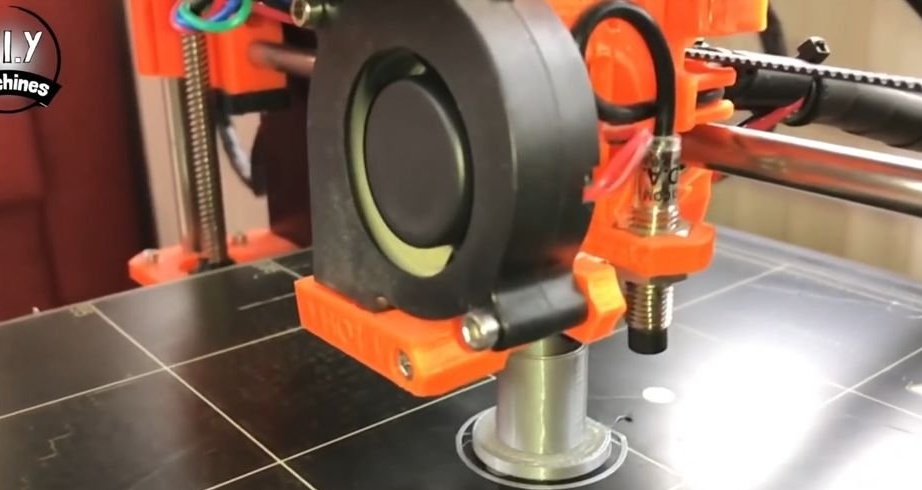
Verplaatst het platform verder 1 cm van de eindschakelaar. Lijn de glazen houder uit en bevestigt de flessenhouder met de dispenser (helaas heeft de meester geen beschrijving gegeven voor de vervaardiging of aankoop van de houder). Volgende. houders worden om de 12 cm bevestigd.



Stap zeventien: code, kalibratie, test
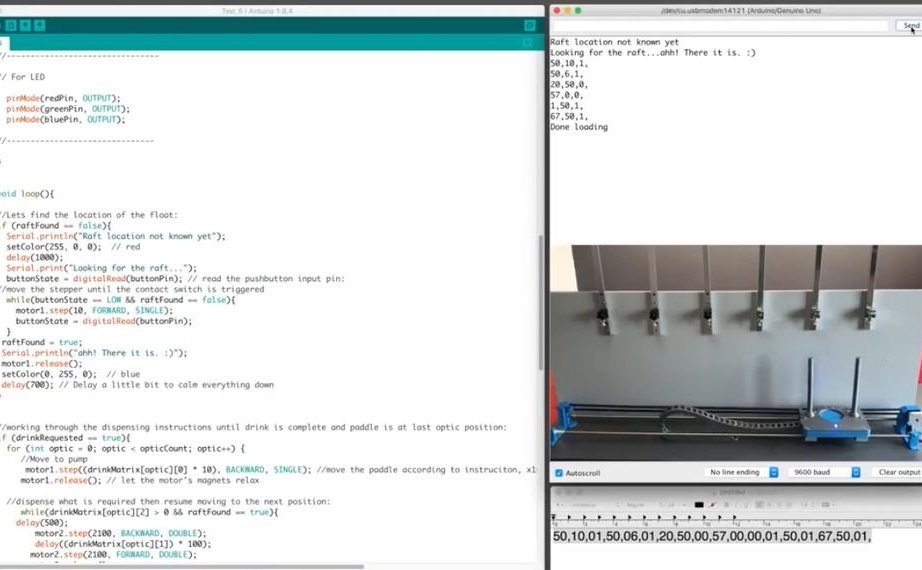
Laadt de hoofdcode op https://www.thingiverse.com/thing:2478890
De volgende waarden zijn ingesteld in de instelling: 50,10,01,50,06,01,50,50,00,57,00,00,50,50,02,50,50,00. De master heeft zes dispensers. In de instellingen zijn er zes groepen van drie, waarbij het eerste cijfer de afstand is van de eindschakelaar, de eerste dispenser, de tweede dispenser, etc., het tweede cijfer is de tijd dat de drank in het glas werd gegoten, het derde is het aantal schenken. Al deze waarden kunnen naar behoefte worden gewijzigd.


Het eerste drankje dat het apparaat bereidde, was gin en cola. Om de druk in de fles gelijk te maken met cola, moet je een gaatje maken. Vervolgens heeft de wizard de nodige parameters ingesteld.



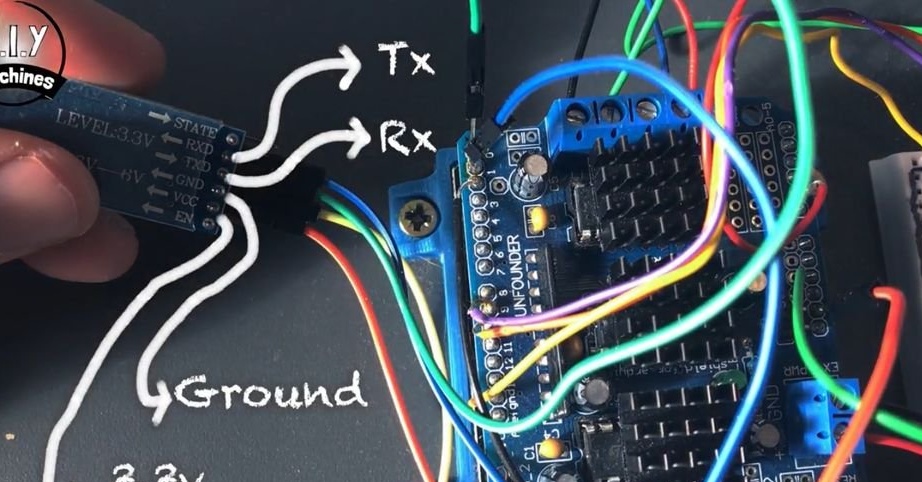
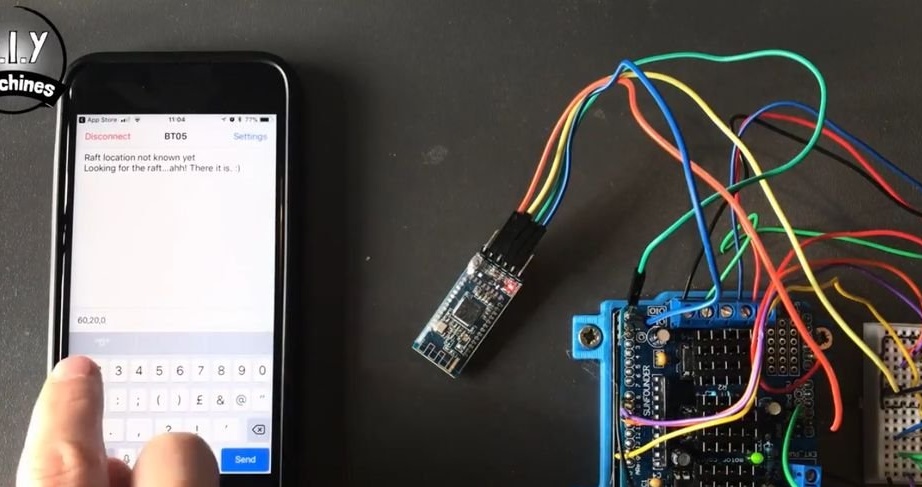
Stap achttien: Bluetooth-module
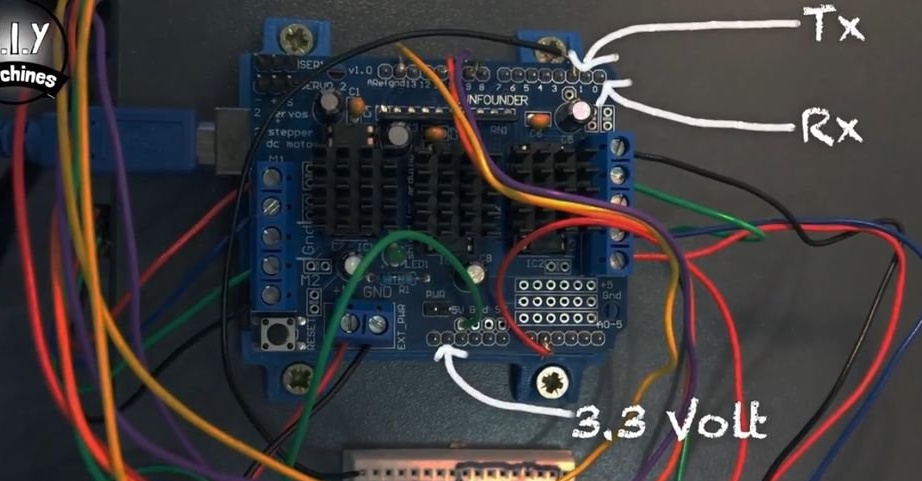
Om de barman te bedienen vanaf de gadget, installeerde de meester een Bluetooth-module. De module wordt als volgt aangesloten.
HM10 -> Arduino Shield
RXD ------> TX
TXD -------> RX
GND ------> Ground
VCC ------> 3.3V

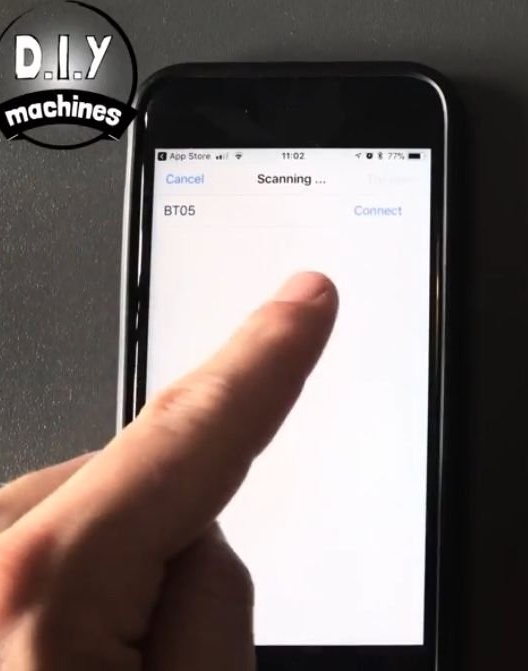
De meester heeft een smartphone met iOS. Voor dit systeem downloadt hij "hm10 bluetooth serial lite" uit de applicatiewinkel. Vervolgens brengt het verbindingen tot stand en voert instellingen in.

Alles is klaar en voor meer complete informatie een paar video's.