


In de kring van raketmodellers voor dit knooppunt is het gebruikelijk om de term avionica - avionica te gebruiken. Ik begrijp eerlijk gezegd niet echt waarom. In de overgrote meerderheid van de gevallen is het knooppunt alleen verantwoordelijk voor het activeren van het reddingssysteem, als het koeler is, de registratie van vluchtgegevens en video-opname. Maar het concept van luchtvaartelektronica heeft een duidelijke definitie: "De luchtmacht heeft van oudsher een duidelijke indeling van vliegtuigapparatuur (vliegtuigen) in luchtvaartelektronica (AEC) ontwikkeld, voor haar werk zendt en / of ontvangt zij radiogolven) en luchtvaartapparatuur (AO). De meeste AO-systemen bevatten ook elektronisch componenten en componenten, maar gebruik geen radiogolven tijdens hun werking. "
Op basis van deze definities zou het veel logischer zijn om de term luchtvaartapparatuur of gewoon luchtvaartelektronica te gebruiken. Maar avionica dus avionica.
Op basis van deze definities zou het veel logischer zijn om de term luchtvaartapparatuur of gewoon luchtvaartelektronica te gebruiken. Maar avionica dus avionica.
Er zijn veel variaties en oplossingen voor deze taak: timers, waarbij de parachute na een bepaalde tijd wordt uitgeworpen, die vóór de vlucht wordt berekend, optische kantelsensoren (LED's). Maar vanwege het feit dat we in een samenleving en tijd leven waarin geavanceerde digitale technologieën voor iedereen beschikbaar zijn, zijn slimme circuits die in staat zijn om de hoogte te meten, veel gebruikt. Dergelijke schema's zijn gebouwd op basis van hoogtemeters (hoogtemeters), het is ook een barometrische druksensor. Zoals ik denk dat iedereen weet dat de atmosferische druk afhankelijk is van de hoogte. Daarom hebben de bergen een lager kookpunt van water en kunnen expeditieleden zuurstofgebrek ervaren. Onder normale levensomstandigheden kan een persoon het verschil in atmosferische druk niet opvangen, deze apparaten kunnen ook veranderingen in letterlijk 10 centimeter registreren!
Het is een van deze apparaten die ik vandaag wil beschrijven. Zonder gewetensbezwaren geef ik toe dat het plan niet van mij is. De auteur van het apparaat is de Franse raketmodeller Boris Duro (ik hoop dat het correct in het Russisch is vertaald).
Dit is het "jongste" apparaat dat door Boris wordt voorgesteld, maar het heeft toch voldoende functionaliteit voor een succesvolle start. Laten we eerst zijn werk bespreken. Na het inschakelen wordt het apparaat aan het terrein bevestigd, controleert het de integriteit van de zekering en geeft het een signaal af: intermitterend kort - in orde, intermitterend lang - beschadigd. Het signaal klinkt voor het opstijgen, ongeacht de bruikbaarheid / storing van de zekering na het opstijgen, begint het circuit de hoogte te meten.De start wordt beschouwd als een hoogte van meer dan 20 meter, bij het bereiken van het hoogste punt activeert het apparaat de lont en draait het, met behulp van een eenvoudig cijfer, continu de hoogte van het hoogste punt in een cirkel. Het ziet er zo uit: een lang signaal - 100 meter, een korte 10 meter. Dat wil zeggen, laten we zeggen dat het apparaat 5 lange en 3 korte signalen afgeeft, wat betekent dat de apogeumhoogte 530 meter is. Dit "bericht" draait totdat het apparaat wordt uitgeschakeld. Gegevens worden niet in het geheugen opgeslagen en na het inschakelen begint de hele cyclus opnieuw. Ja, dit toestel neemt geen vluchtgegevens op, zoals veel van zijn analogen, maar voor de eerste vluchten is dit meer dan een geschikte optie. Bovendien is het circuit gemaakt op vlakke componenten zo klein dat het zelfs in de kleinste kinderraket gemakkelijk te plaatsen is.
Dit is het "jongste" apparaat dat door Boris wordt voorgesteld, maar het heeft toch voldoende functionaliteit voor een succesvolle start. Laten we eerst zijn werk bespreken. Na het inschakelen wordt het apparaat aan het terrein bevestigd, controleert het de integriteit van de zekering en geeft het een signaal af: intermitterend kort - in orde, intermitterend lang - beschadigd. Het signaal klinkt voor het opstijgen, ongeacht de bruikbaarheid / storing van de zekering na het opstijgen, begint het circuit de hoogte te meten.De start wordt beschouwd als een hoogte van meer dan 20 meter, bij het bereiken van het hoogste punt activeert het apparaat de lont en draait het, met behulp van een eenvoudig cijfer, continu de hoogte van het hoogste punt in een cirkel. Het ziet er zo uit: een lang signaal - 100 meter, een korte 10 meter. Dat wil zeggen, laten we zeggen dat het apparaat 5 lange en 3 korte signalen afgeeft, wat betekent dat de apogeumhoogte 530 meter is. Dit "bericht" draait totdat het apparaat wordt uitgeschakeld. Gegevens worden niet in het geheugen opgeslagen en na het inschakelen begint de hele cyclus opnieuw. Ja, dit toestel neemt geen vluchtgegevens op, zoals veel van zijn analogen, maar voor de eerste vluchten is dit meer dan een geschikte optie. Bovendien is het circuit gemaakt op vlakke componenten zo klein dat het zelfs in de kleinste kinderraket gemakkelijk te plaatsen is.
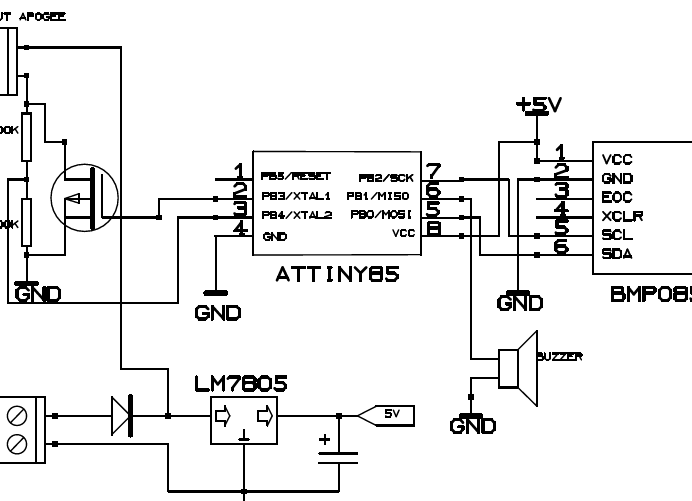
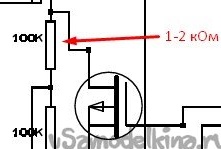
Hierboven ziet u het schakelschema van het apparaat. Het schema is afkomstig van de site van Boris, maar het is vermeldenswaard dat het een kantel heeft die misleidend kan zijn. Het diagram toont een grafische aanduiding van een p-kanaals veldeffecttransistor, wanneer in feite een n-kanaal wordt gebruikt. Welke transistor is niet essentieel om te gebruiken, elk hoogstroom n-kanaal.
Voor productie heb je nodig:
- BMP180 Barometermodule
- Attiny 85 microcontroller
- Elektrolytische condensator 47 mF, 16 V
- 100 kΩ en 2 kΩ weerstanden
- 78L05 stabilisator in TO92-behuizing of gelijkwaardig in SMD
- Hoge stroom veldeffecttransistor IRF540 / IRFZ44 of equivalent in SMD-versie
- Pads voor draden 2 stuks.
- 5 V actieve zoemer
- Diode 1N4001 of 1N4007. Optioneel is het een beveiliging tegen inhalen.
- Textolite
Van de tool:
- Soldeerbout
- Pincet
- Zijsnijders
- Soldeer
- Flux
- USBasp-programmeur
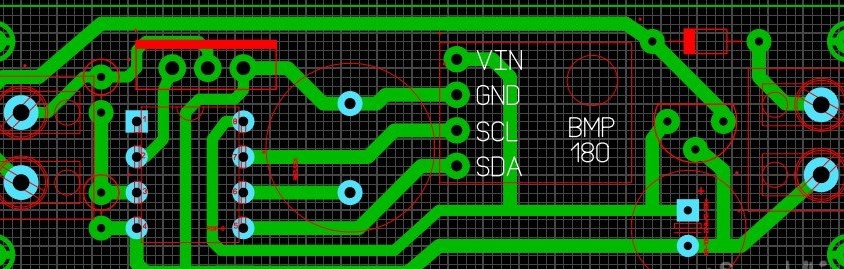
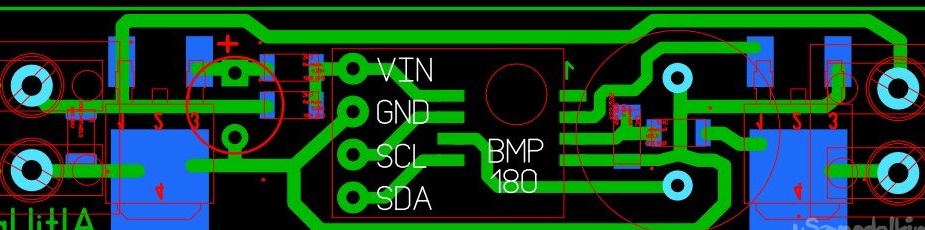
In onderstaand archief staan twee bestanden van de printplaat, voor SMD componenten en voor conventionele uitgangsbedrading. Ik moet meteen zeggen dat ik het tweede bord niet heb verzameld, ik deed het in SMD, maar voor degenen die om een of andere reden kleine vlakke componenten niet kunnen solderen, heb ik een spoor gemaakt voor gewone componenten. Desalniettemin heb ik verschillende keren gecontroleerd, het zou foutloos moeten zijn.
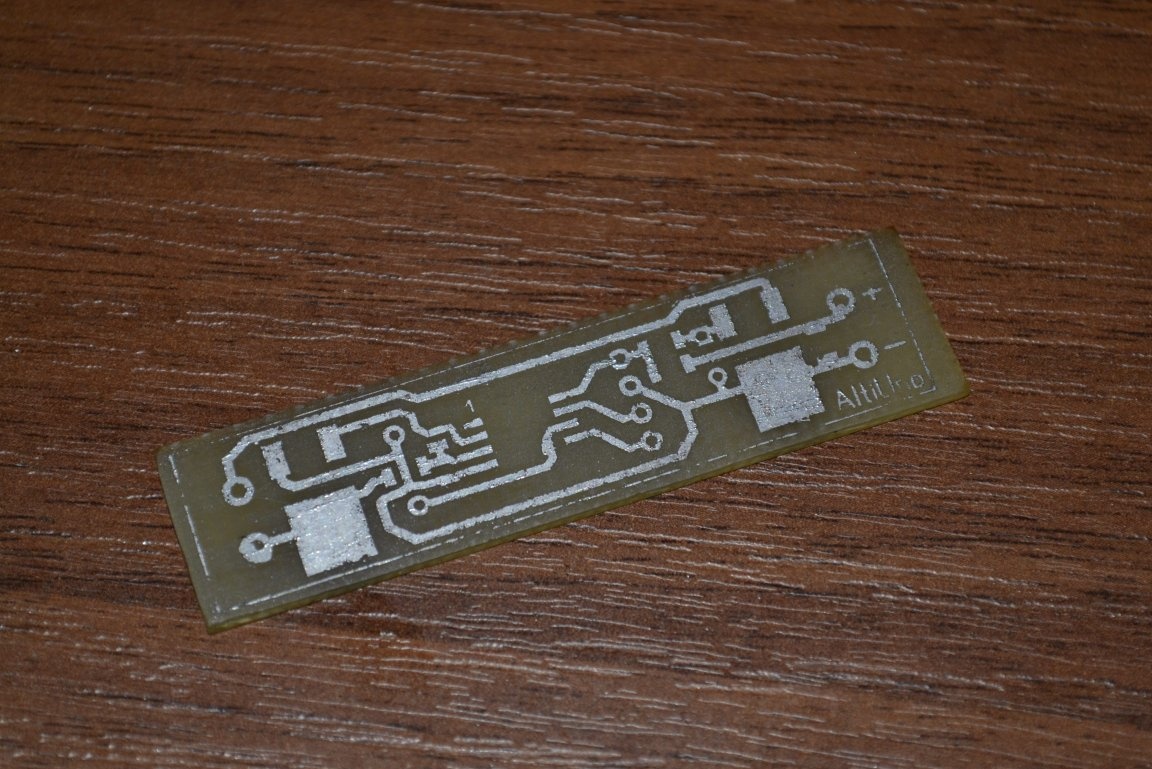
En dus is het eerste wat we doen een printplaat maken. Ik deed zoals gewoonlijk LUT.
En soldeer alle SMD-componenten behalve de controller.
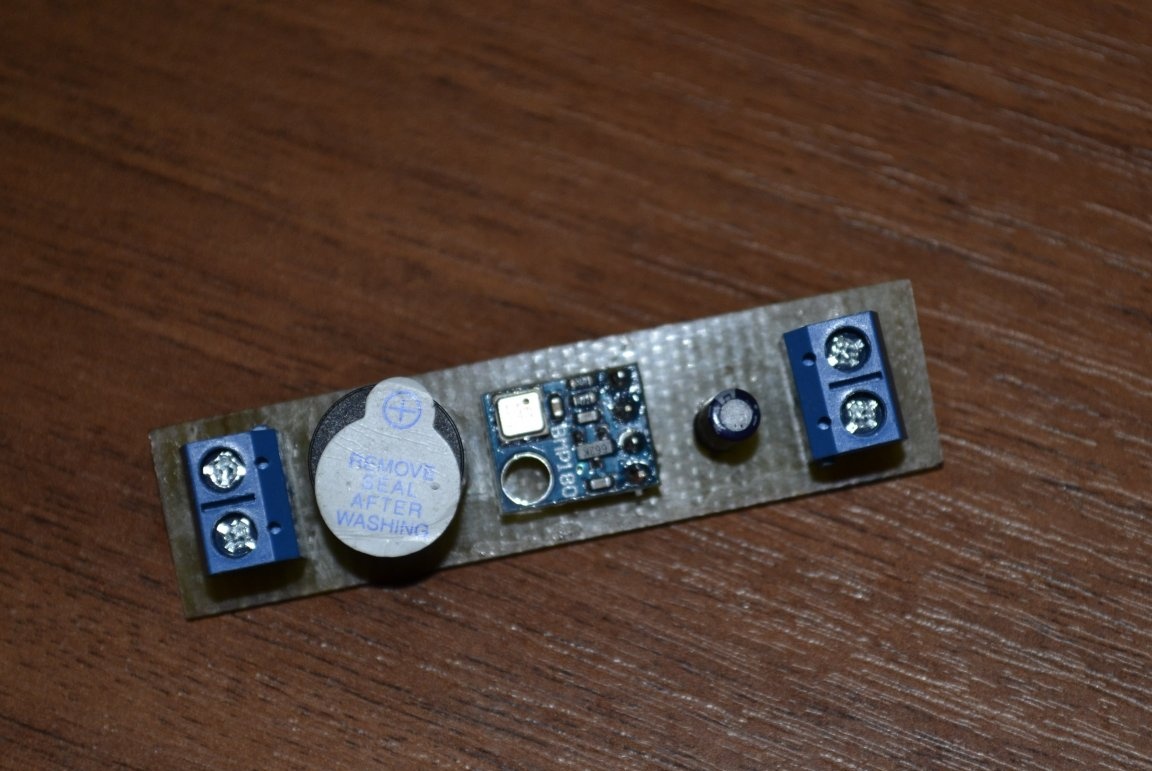
Soldeer vervolgens de zoemer, sensor, pads en condensator.
Nu moet je de controller flitsen. De firmware voor dit circuit is geschreven in een arduino-omgeving, dus je moet de Arduino-bootloader in de controller invullen. Dit wordt gedaan via de USB ASP-programmeur rechtstreeks vanuit de Arduino-programmeeromgeving zelf. Allereerst moet je de controller op de programmeur zelf aansluiten. Het aansluitschema is hieronder.

Om de controller in SMD-versie aan te sluiten, is een adapter vereist.

Het bestand met de printplaat staat ook in het archief aan het einde van het artikel. Laten we nu verder gaan met de softwareverbeteringen. Eerst moet je vrienden maken Arduino IDE met Attiny 85, omdat deze controller standaard niet wordt ondersteund. Om dit te doen, moet je bij ... / Arduino / hardware een kleine map maken waarin de inhoud van het archief met de kernels wordt geplaatst. U kunt het archief downloaden deze linkDownload de laatste versie. Nu kan de omgeving de controller zien. We verbinden de programmeur, openen de arduino-omgeving, gaan naar en plaatsen USBasp.
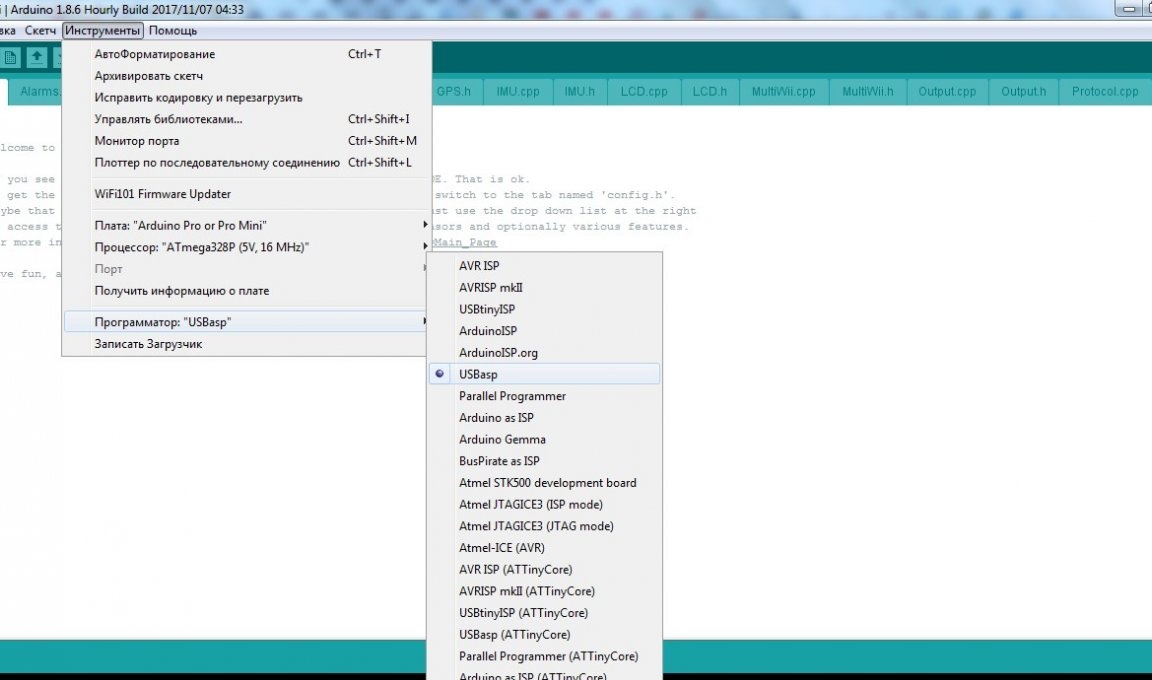
Selecteer nu ATtiny25 / 45/85.
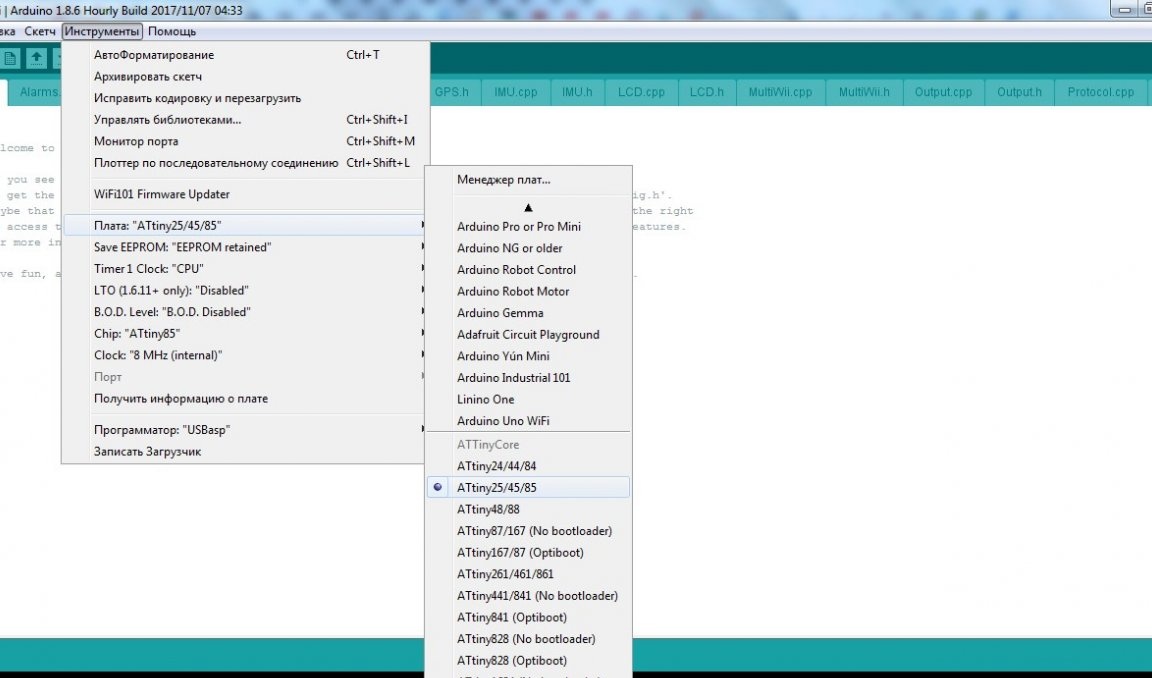
We denken dat ATtiny85 in Chip zou staan. Klik nu allemaal in dezelfde tools. Als alles correct is gedaan, zijn er geen problemen met het contact, zijn er geen problemen met de stuurprogramma's, dan zal de omgeving een succesvolle opname melden. Een groot pluspunt in deze firmware is dat je geen last hebt van zekeringen, de Arduino-omgeving doet alles zelf. Dus je vermoordt de controller niet. Daarna kunt u de schets invullen. De schets wordt bijna op dezelfde manier gegoten als gewoonlijk, maar in plaats van de gebruikelijke knop moet je naar gaan. Dat is alles, nu kunt u een tink in het bord solderen.

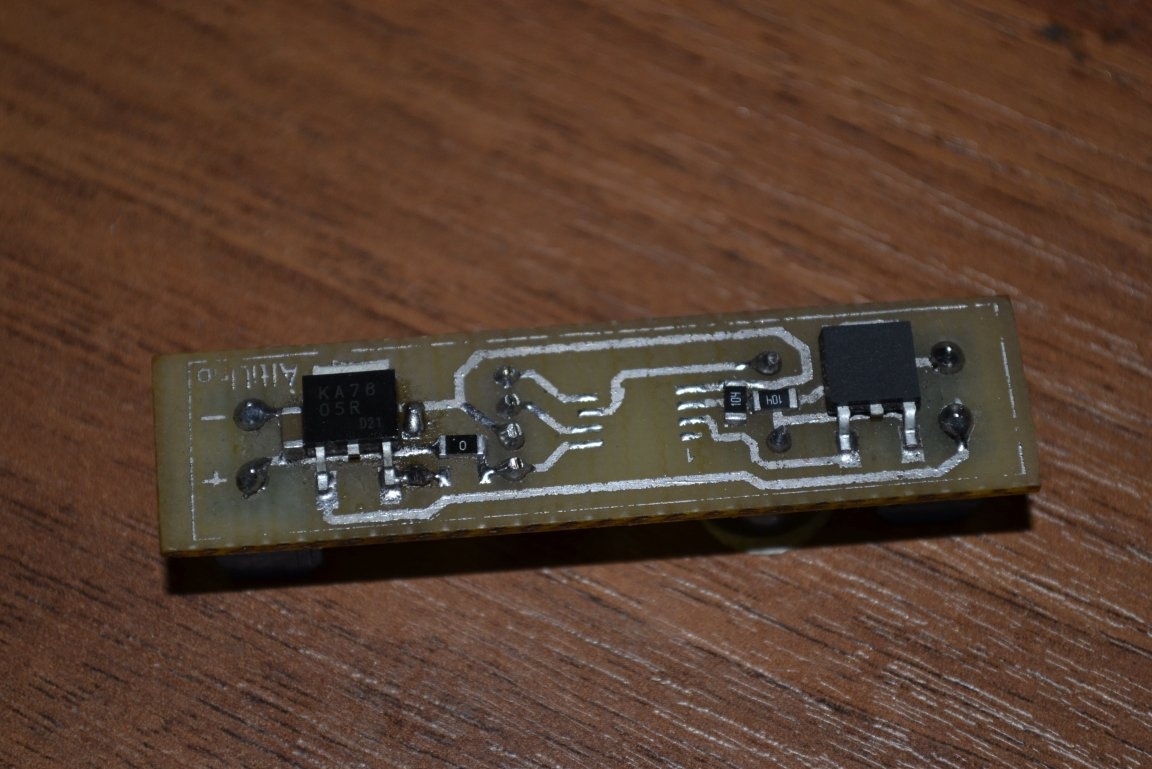
Laten we nu verder gaan met de kenmerken van mijn printplaat. Ik heb een avionica-compartiment gemaakt om er een 18650-batterij in te plaatsen.Zoals u weet, produceert een volledig opgeladen single-bank li-ionbatterij 4,2 volt, de onderste drempel van de voedingsspanning voor Attiny 85 is 2,7 volt, het kritische ontladingsniveau voor een dergelijke batterij, dat wil zeggen, zoals u begrijpt, is het vermogen voldoende. MAAR! Alleen als u stroom toepast door de stabilisator direct te omzeilen. Ik ben niet begonnen met het verwijderen van de stabilisator uit het circuit om deze universeler te maken, ook al is deze niet bij mij betrokken. En dus zijn er vijf op het bord voor twee weerstanden.
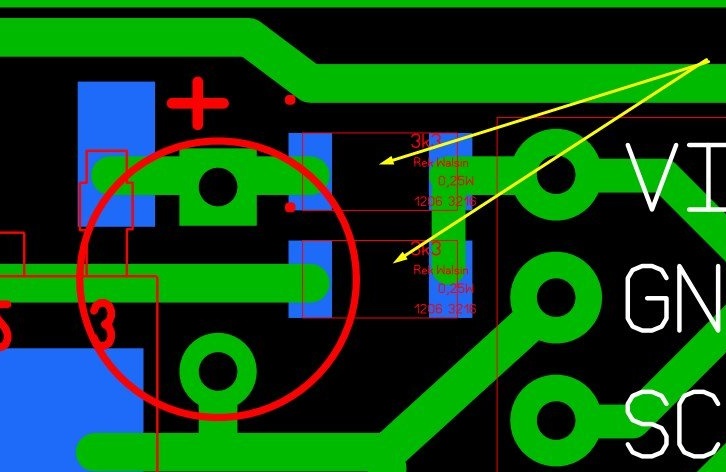
Dit zijn niet echt weerstanden. Op een paar van deze hakken moet je een springer solderen, de zogenaamde nulweerstand (je kunt dom een stuk draad gebruiken). Als je, zoals ik, het circuit vanuit zo'n stroombron zal voeden, soldeer dan aan de onderste contacten, als je naar de foto kijkt, als je van plan bent om bijvoorbeeld een kroon te gebruiken, dan naar de bovenste, naar de output van de stabilisator. Op de printplaat is eigenlijk alles zichtbaar, wat en waar gaat het heen.
Op het bord voor uitvoercomponenten is deze optie niet aanwezig. Je kunt de zegel zelf afmaken, bijvoorbeeld een paar jumpers toevoegen, of gewoon de stabilisator niet solderen en de jumper solderen.
Nog een nuance. Wanneer hij wordt gevoed door een batterij met een spanning van 4,2 volt, kan het voorkomen dat de transistor constant open is. Zoals je in het diagram kunt zien, is er een scheiding tussen de afvoer en de bron. Om het probleem op te lossen, moet je een van de weerstanden vervangen door 1-2 kOhm. Welke wordt hieronder weergegeven.
Op het bord voor uitvoercomponenten is deze optie niet aanwezig. Je kunt de zegel zelf afmaken, bijvoorbeeld een paar jumpers toevoegen, of gewoon de stabilisator niet solderen en de jumper solderen.
Nog een nuance. Wanneer hij wordt gevoed door een batterij met een spanning van 4,2 volt, kan het voorkomen dat de transistor constant open is. Zoals je in het diagram kunt zien, is er een scheiding tussen de afvoer en de bron. Om het probleem op te lossen, moet je een van de weerstanden vervangen door 1-2 kOhm. Welke wordt hieronder weergegeven.
Nu voor de firmware. Er zijn 2 firmwares in het archief, de belangrijkste voor het activeren van de elektrische zekering van het reddingssysteem en een alternatieve. Met alternatieve firmware kunt u het circuit gebruiken als een geluidszoekbaken. Omdat het circuit erg compact is, kan het in de kuip van de raket worden geplaatst, waarbij een compacte stroombron wordt gekozen. Om dit te doen, wordt in plaats van een zekering een krachtige piëzo-zender aangesloten op de contacten, vergelijkbaar met de hieronder getoonde.

Iemand zal zeggen waarom, op het bord staat een zoemer. Ja, maar hoe hard je het ook mag lijken tijdens tests in de kamer, in feite hoor je een plafond van ongeveer 20 meter in het veld Over het algemeen zijn zoekmachines voor modellen een heel epos. In toekomstige plannen heb ik een assemblage van GPS-baken, die de coördinaten zal bepalen en ze in de lucht zal sturen. Coördinaten worden ontvangen op een draagbaar radiostation (walkietalkie) en met behulp van elke telefoon (nu allemaal met een GPS-navigator) wordt er naar een model gezocht. Maar het is in de plannen, we zullen terugkeren naar de realiteit.
Hoewel er in principe niets bijzonders is om naar terug te keren. Er is een speciaal chassis gemaakt voor het bord, waardoor het in een raket is gemonteerd. Het chassis is speciaal voor u gemaakt het model. Ik heb het gemaakt van de dunste haarspelden die ik in een bouwwinkel kon kopen, en stukjes zelfgemaakte glasvezel.
Hoewel er in principe niets bijzonders is om naar terug te keren. Er is een speciaal chassis gemaakt voor het bord, waardoor het in een raket is gemonteerd. Het chassis is speciaal voor u gemaakt het model. Ik heb het gemaakt van de dunste haarspelden die ik in een bouwwinkel kon kopen, en stukjes zelfgemaakte glasvezel.

Het bord is aan het chassis bevestigd op gewone elastiekjes voor briefpapier. Het is gemakkelijk te installeren en werkt als een schokdemper, zodat de sensor niet gek wordt.
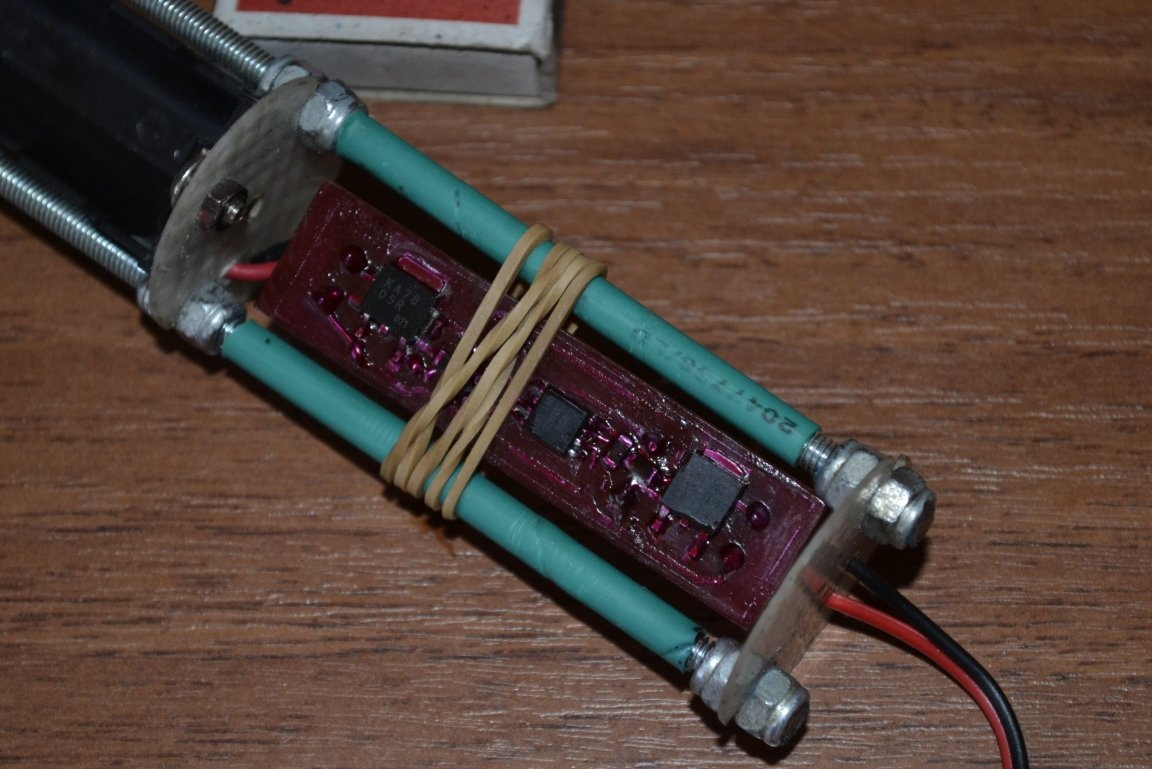
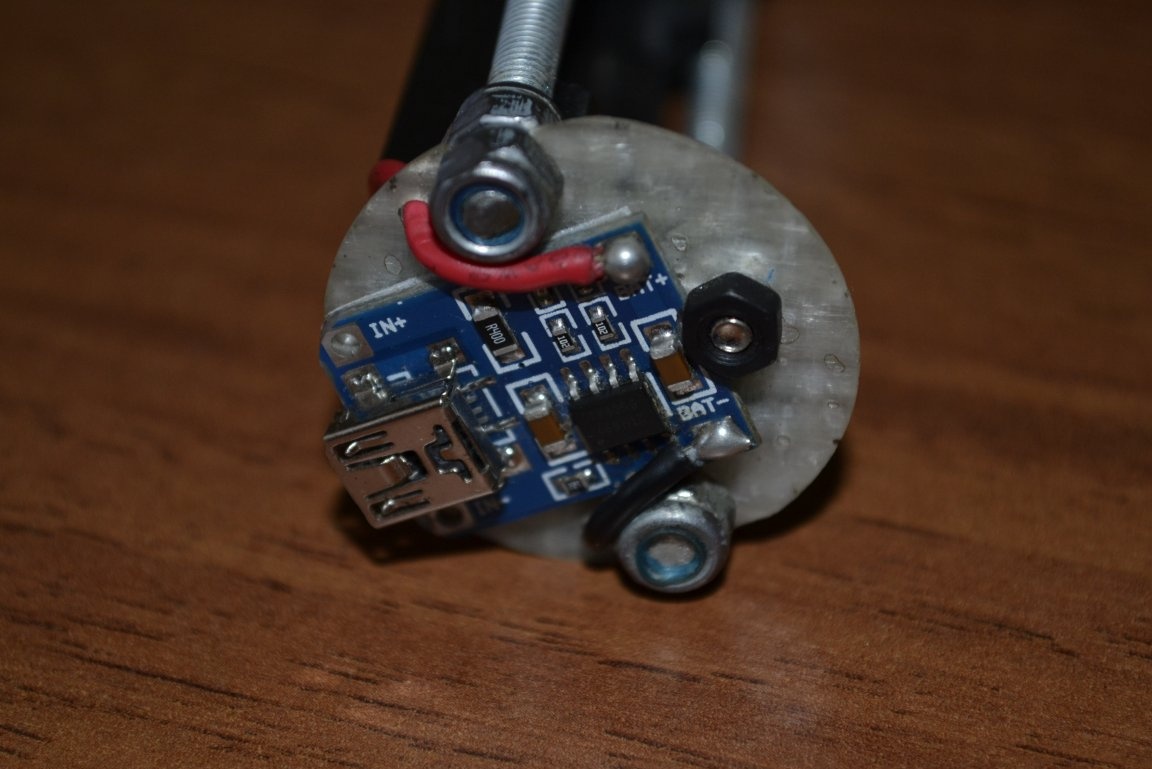
Zoals je het bord kunt zien vanaf de zijkant van de tracks die ik heb geschilderd depressief nagellak, voor meer bescherming, zeg maar. Vanaf het einde van het chassis besloot ik om een oplaadmodule te bevestigen, ik kocht ooit een paar dozijn op Ali, ze kosten als zaden, dus het is niet jammer.
Een paar woorden over de verificatie. We nemen een pot (zodat het circuit met stroom past) en een nylon hoes. We maken een gat in het deksel en plakken de buis van de druppelaar hermetisch erin. Het andere uiteinde van de buis is verbonden met een injectiespuit met blokjes van 20. We doen het apparaat in een pot, sluiten en pompen de lucht eruit met een injectiespuit. Nadat we lucht hebben teruggevoerd.
De tweede optie. Op advies van een bekende modelleur. We nemen een buisje van een lolly, een staafje van een pen, een oorstokje. Aan het uiteinde winden we meerdere lagen isolatietape zodat de isolatietape enkele millimeters voorbij de buis uitsteekt. Snijd voorzichtig met een scherp montagemes de rand van de wondbuis af, die gelijk zou zijn. We brengen het gelijkmatig aan op het gat in de sensor zelf en trekken de lucht scherp naar buiten met onze mond. Primitief, maar het werkt.
De tweede optie. Op advies van een bekende modelleur. We nemen een buisje van een lolly, een staafje van een pen, een oorstokje. Aan het uiteinde winden we meerdere lagen isolatietape zodat de isolatietape enkele millimeters voorbij de buis uitsteekt. Snijd voorzichtig met een scherp montagemes de rand van de wondbuis af, die gelijk zou zijn. We brengen het gelijkmatig aan op het gat in de sensor zelf en trekken de lucht scherp naar buiten met onze mond. Primitief, maar het werkt.
En een paar woorden, voor degenen die een vraag hebben, hoe wordt de climax bepaald. In al dergelijke apparaten wordt dit op dezelfde manier geïmplementeerd. Tijdens het vliegen wordt de huidige hoogte constant vergeleken met de vorige. Zodra deze waarde onder de vorige begint te dalen (de raket begon te dalen), wordt deze gefixeerd door het hoogtepunt. Maar opdat er geen valse positieven zouden zijn, wordt het apogeum beschouwd als een raketdaling tot een bepaalde hoogte, meestal een val van 3 meter (dit wordt gecorrigeerd in de code), maar voor hoger vliegende raketten plaatsen ze er meer.
Alle benodigde bestanden kunnen worden gedownload van.
Dat is alles. Video met een poster demo hieronder. Alle succes in het werk!