Zijn manier van lopen lijkt erg op een echte kakkerlak. Tijdens het lopen zwaait het een beetje vol vertrouwen naar voren. De kakkerlak heeft een minimum aan complexe onderdelen en is zeer eenvoudig te vervaardigen.
1. videotest
De video toont een mechanische kakkerlak vanuit verschillende hoeken tijdens de werking en beweging.
2. Kenmerken en kenmerken.
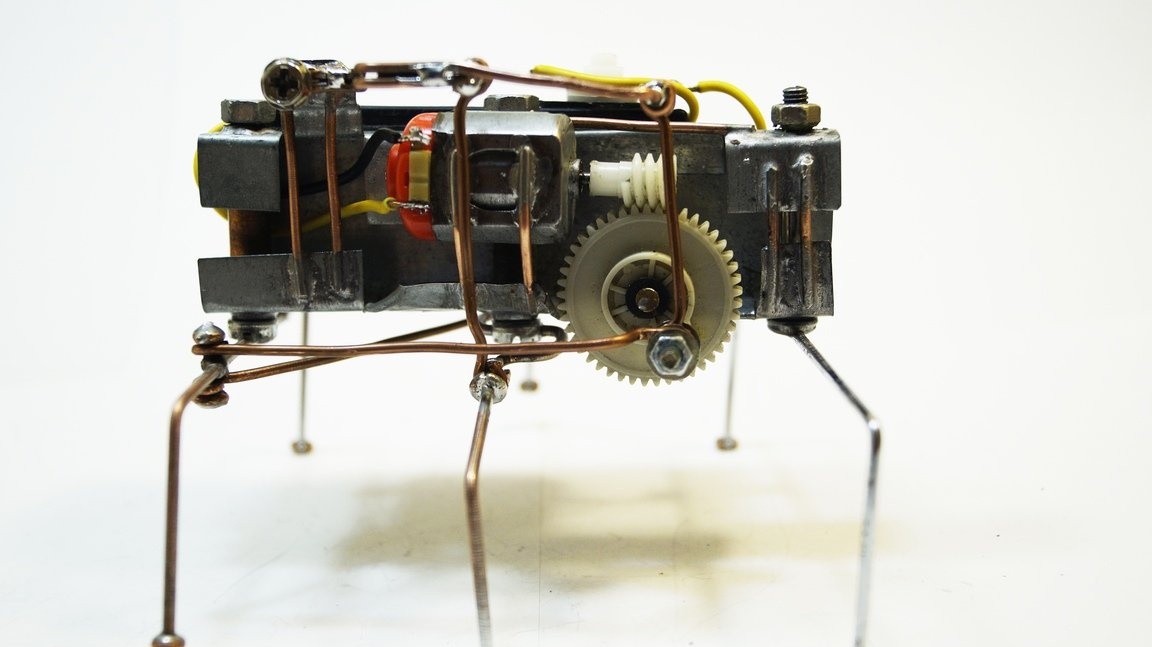
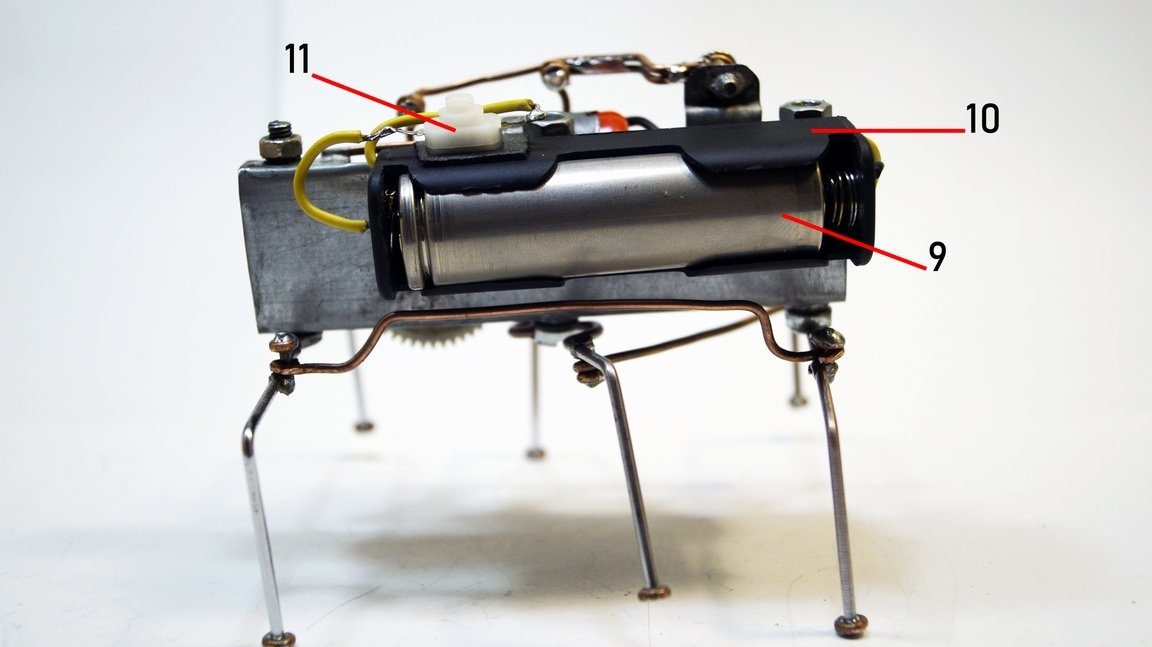
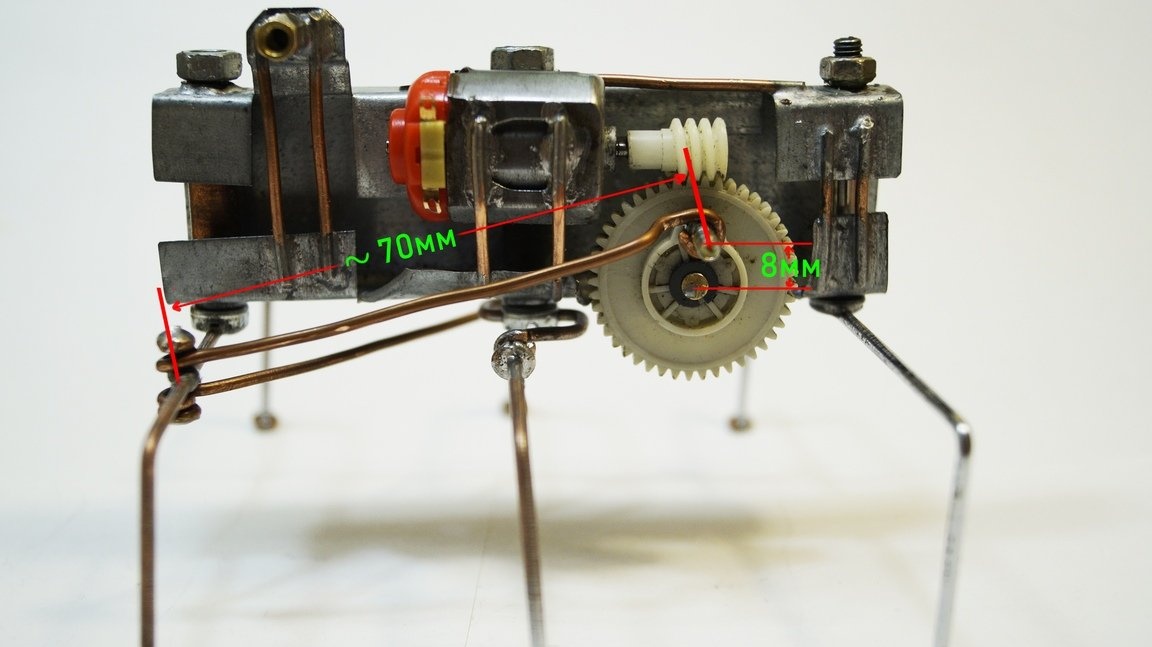
Op een foto 1. De mechanische kakkerlak wordt in zijaanzicht getoond. Op een foto 2. Het bovenaanzicht wordt getoond.
Foto 1.
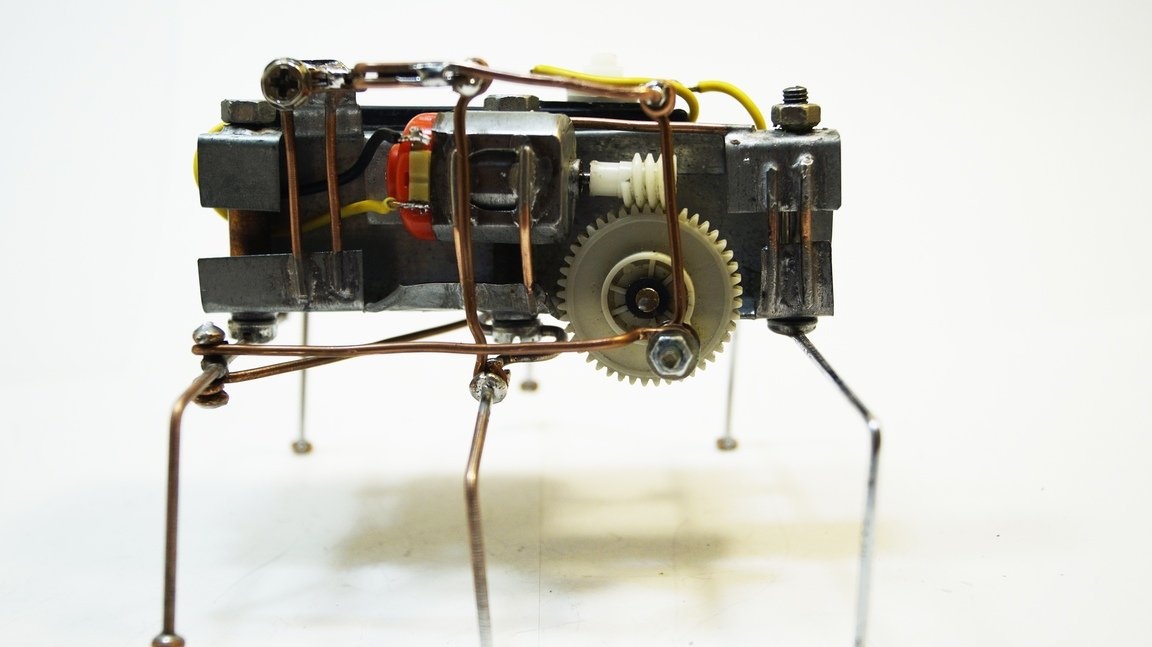
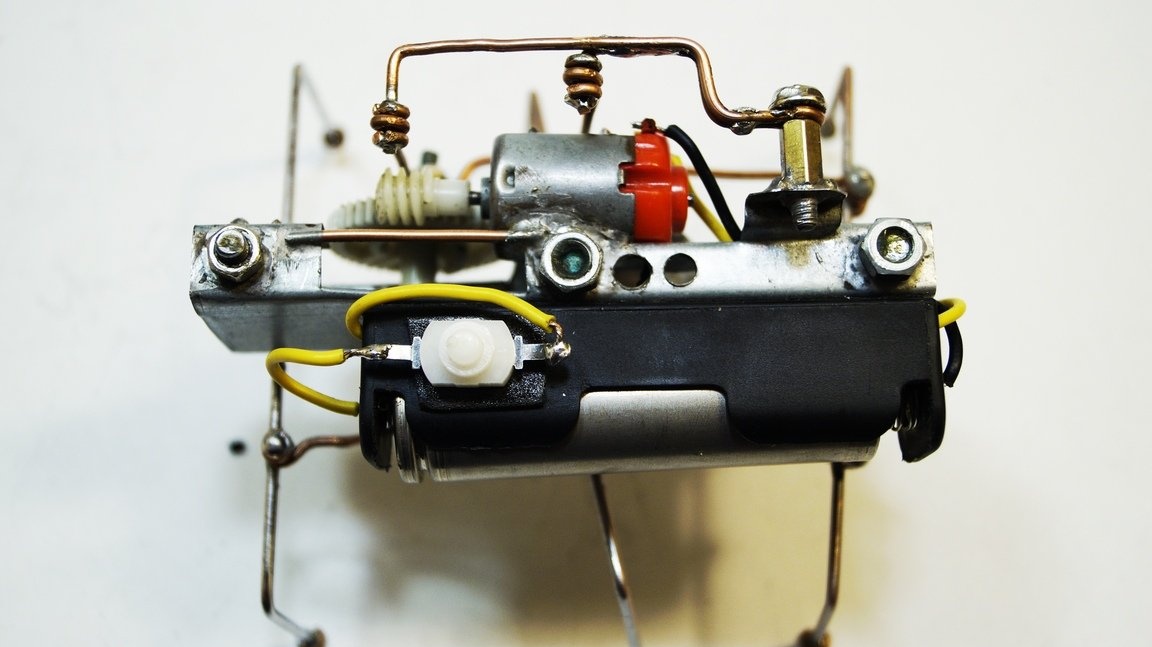
Foto 2.
ONTWERP Als frame werd het profiel ppn-2 30X20 gebruikt. De motor en andere verbindingen zijn door solderen gemonteerd. Poten van een kakkerlak zijn bevestigd met M6-bouten. De aan / uit-knop en het batterijvak zijn vastgelijmd aan dubbelzijdige tape. Als tractie voor het aandrijven van de benen van een kakkerlak werd een koperen kabel gebruikt met een doorsnede van 2,5 mm.
MOTOR EN KRUKKEN. De motor en de krukas worden op POS-61 aan het frame gesoldeerd, soldeerzuur ZnCl (zinkchloride). Om het koppel te vergroten en de grootte te verkleinen, werd een wormwiel gebruikt.
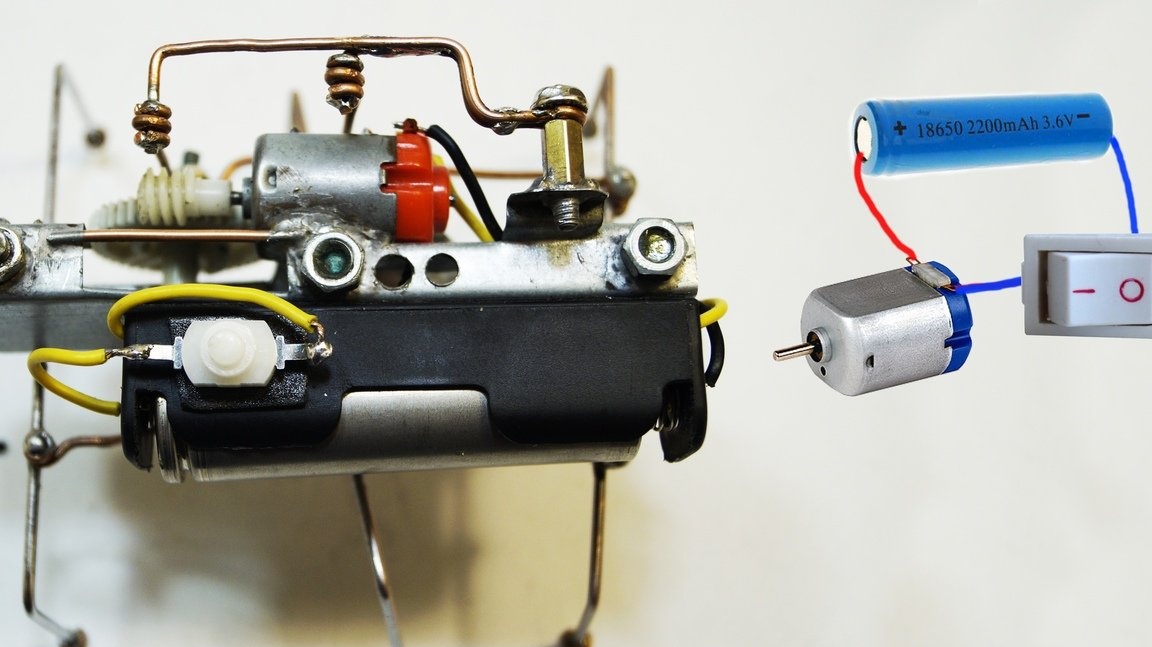
VOEDING. Als krachtbron werd een 18650 batterij gebruikt, de stroombron is 3,7V.
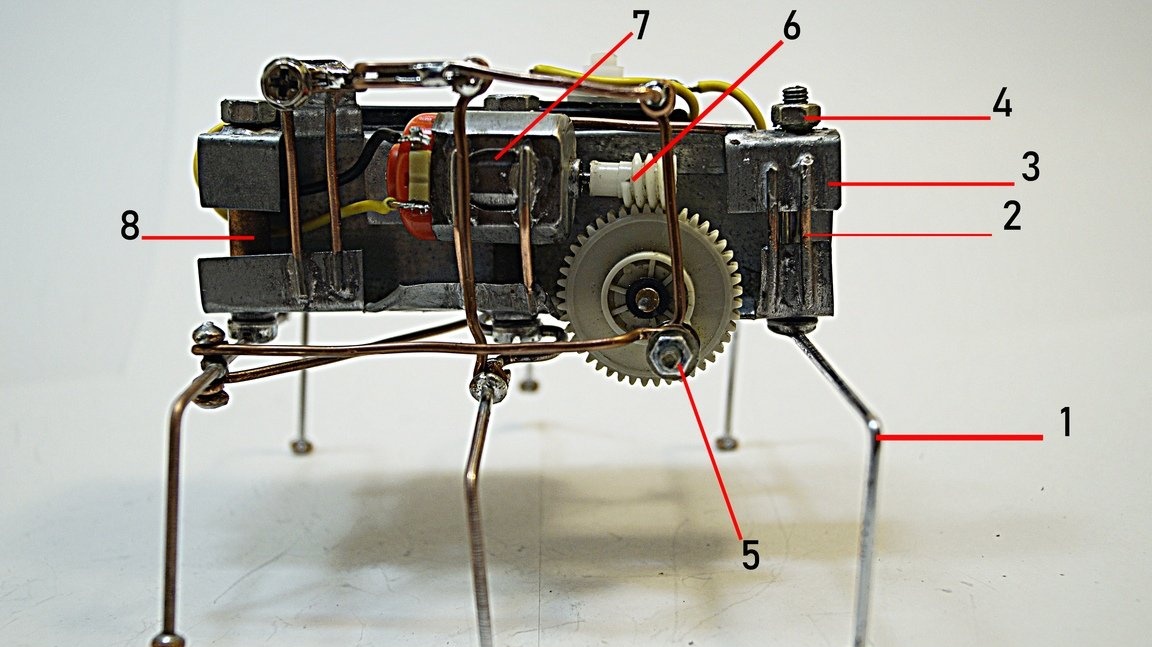
DETAILS ROBOTONTWERP
1. Poten van een kakkerlak.
2. Het schotje.
3. Het frame.
4. De as van de poten van een kakkerlak.
5. Krukmechanisme.
6. Wormaandrijving.
7. Elektromotor F130 5 V.
8. De mouwas van de kakkerlakkenpoten.
9. Batterijtype 18650, 3,7 V.
10. Batterijvak.
11. Aan / uit-knop.
3. Het werkprincipe.
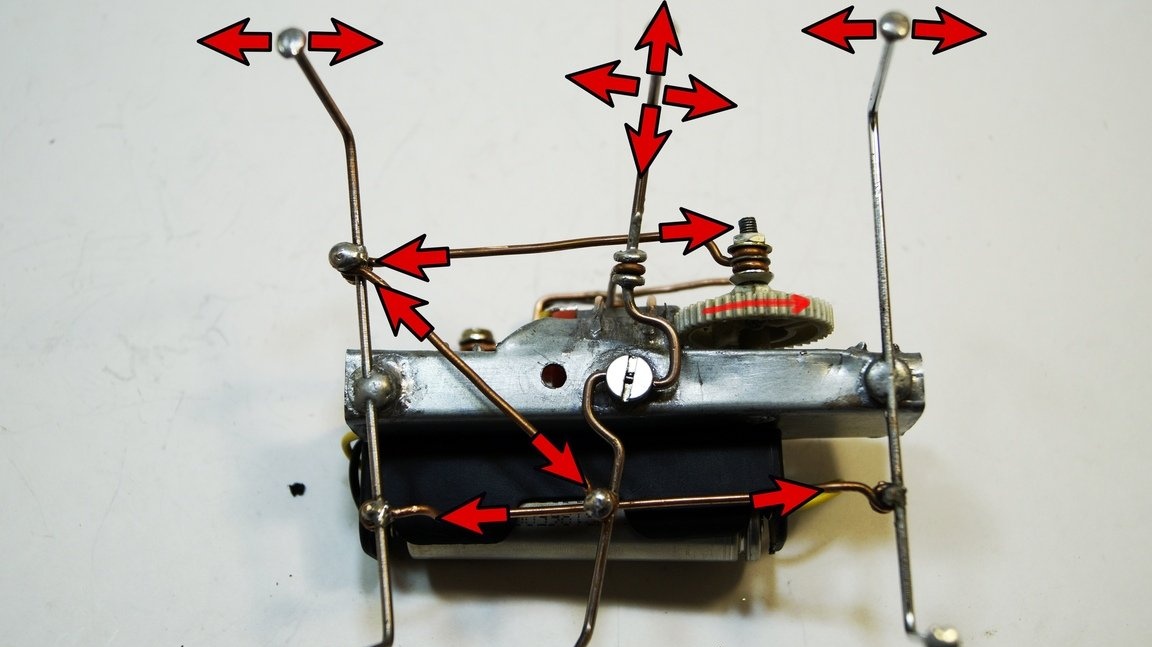
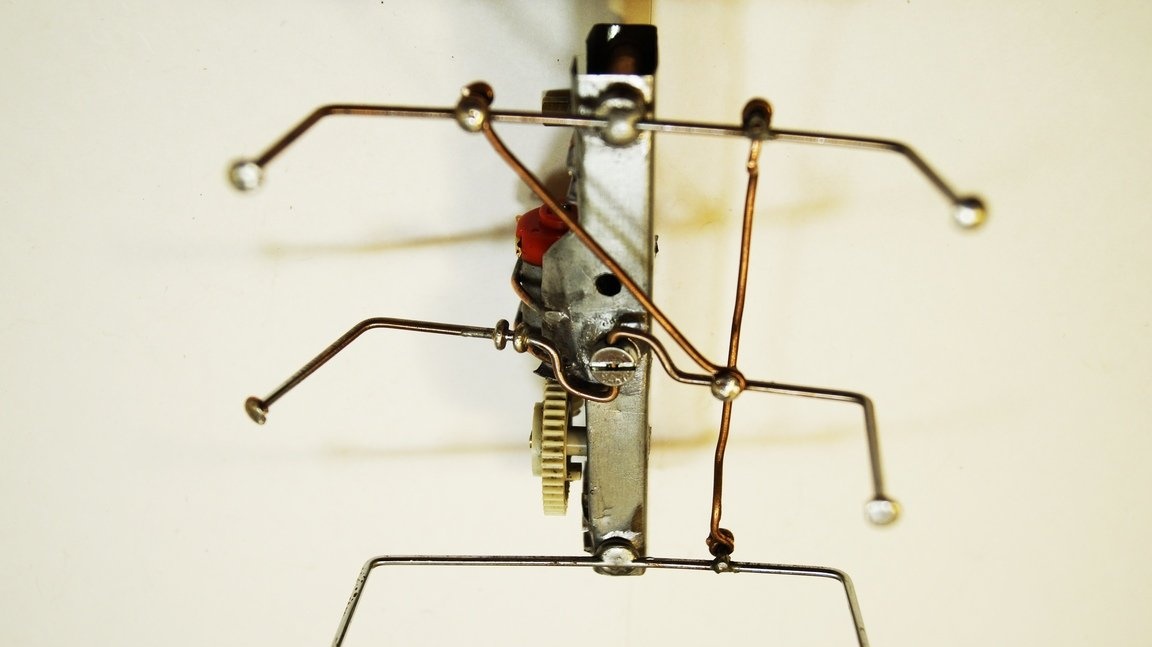
Op een foto 3. 4. Het werkingsprincipe van mechanische delen van een kakkerlak wordt getoond. Het is de moeite waard eraan te denken dat de voor- en achterbenen van de robot horizontaal bewegen, en de middelste benen verticaal en horizontaal.
De motor wordt via de sleutel van stroom voorzien, de motor draait het krukmechanisme. De slinger drijft de voorpoot door tractie, respectievelijk vanaf de voorpoot, de stuwkracht duwt de achterpoot (ze bewegen synchroon). Het middelste paar poten is kruislings verbonden met het eerste paar (ze bewegen in tegenfase).
Om het middelste paar poten verticaal te verplaatsen, wordt een hendel boven de motor gemonteerd, die in beweging wordt gezet vanaf het krukmechanisme.
Foto.3
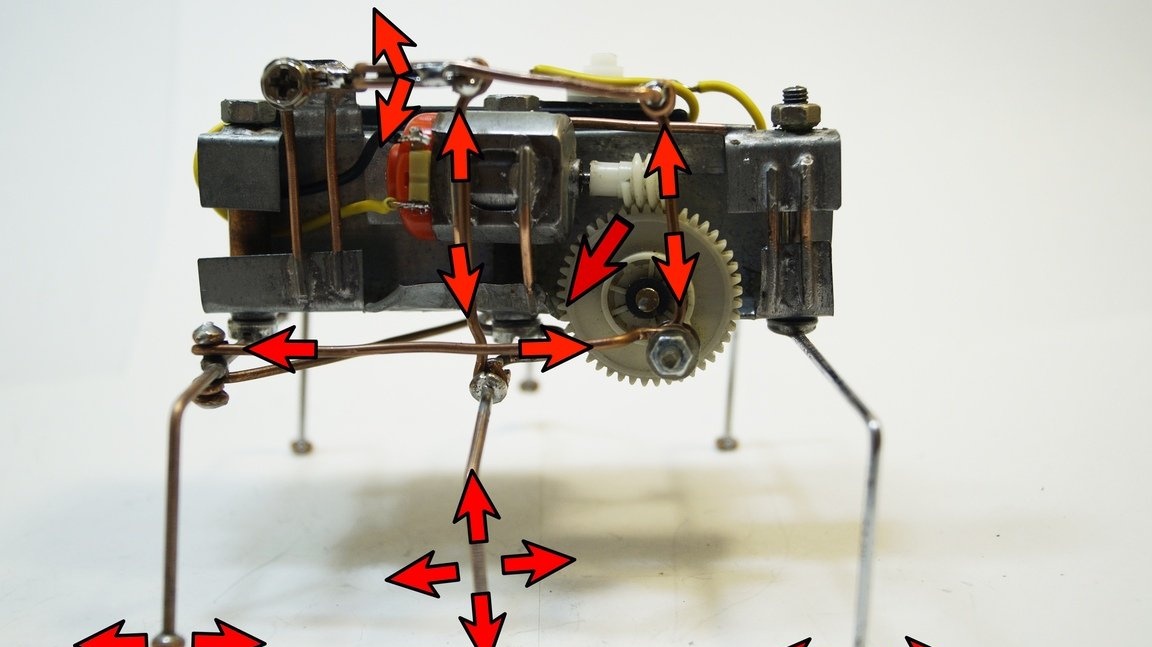
Foto 4
4. Materialen en gereedschappen.
1.Soldeerbout 50W.
2. Batterijvak.
3.Prysoy POS-61.
4. Een koperdraad met een doorsnede van 2,5 mm.
5. Soldeerzuur ZnCl (zinkchloride)
6. Elektromotor F130 5V.
7. Schaar voor metaal.
8. Wormaandrijving.
9. Tangen.
10. Stalen buis, diameter 80 mm.
11. Oplaadbare batterij 18650.
12. profiel PPN-2 30X20.
En ook: (aan / uit-knop, dubbelzijdige tape, montagedraad)

5. Montage-instructies.
1. het maken van een kakkerlak frame.
Teken de markering op het profiel zoals aangegeven in Foto 5.
Foto 5.
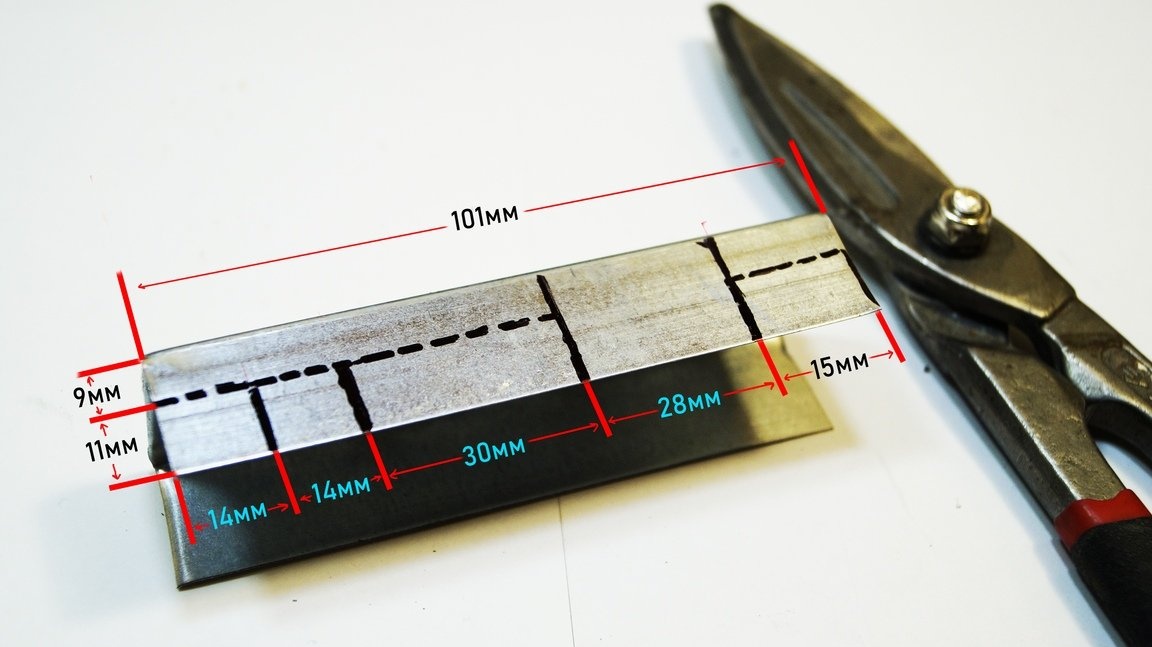
Met een schaar voor metaal knippen en buigen we het werkstuk met een tang zoals op foto 6. Markeer het onderste deel zoals aangegeven op foto 6. Buig het profiel met een tang zoals op foto 7.
Foto 6.
Foto 7.
2. Elektromotor en krukas.
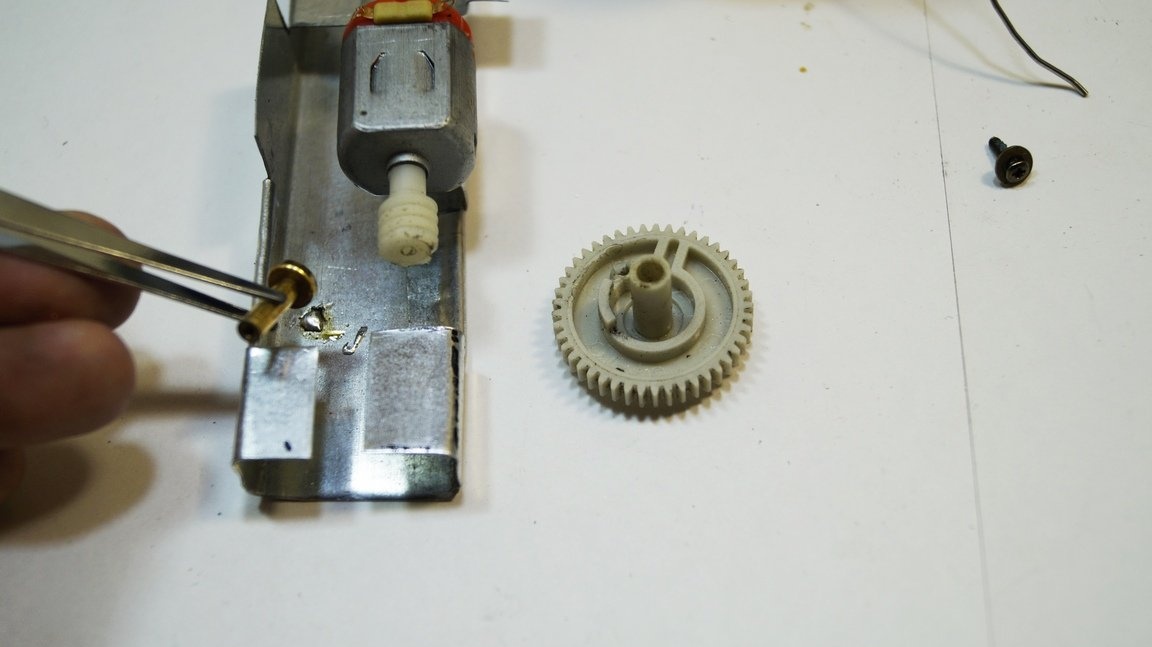
De volgende stap is het solderen van de elektromotor aan het frame. De motor moet voor het solderen worden gedemonteerd. We overspoelen het motorhuis en het frame met een soldeerbout Foto 8.
We solderen het lichaam van de elektromotor en het frame aan elkaar, verwarmen de onderdelen goed met een soldeerbout en drukken ze tegen elkaar Foto 9. !!! WEES VOORZICHTIG, DETAILS WARMTE VEEL VERWARMD !!!
Foto 9.
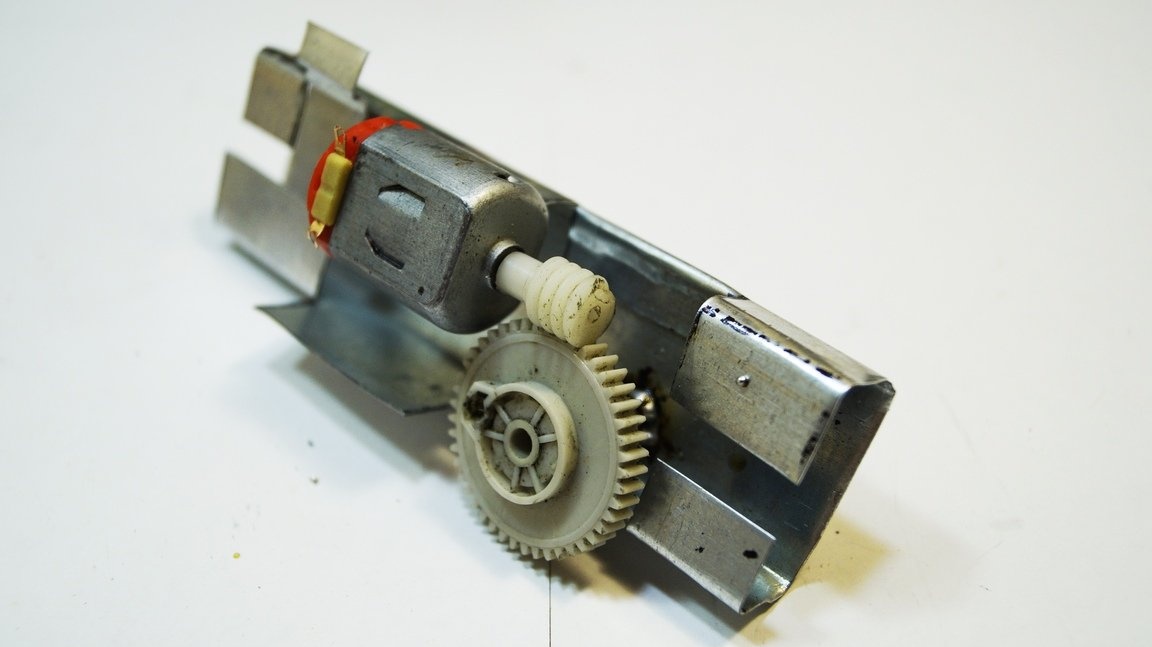
De elektromotor terugzetten. We solderen de krukas op zijn plaats, dit gebeurt experimenteel. Het wormwiel moet goed in elkaar passen, de tandwielen mogen niet scheef staan Foto 10.11.
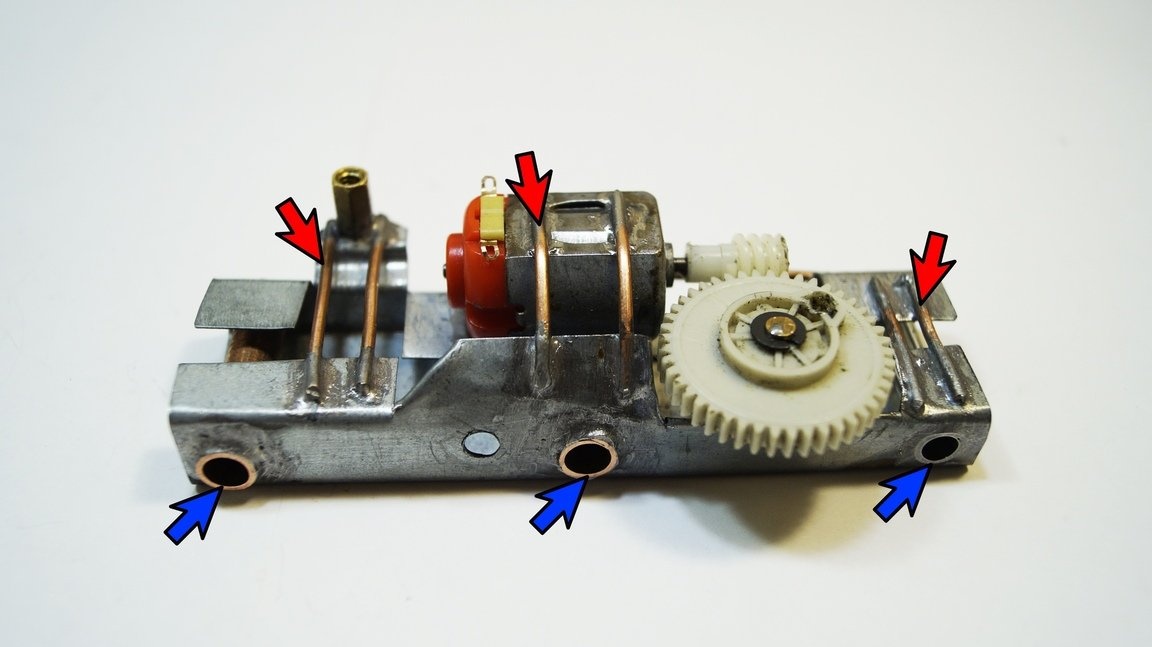
3. Gaten voor de benen van een kakkerlak.
Om de kakkerlakpoten aan het frame te bevestigen, moet je gaten boren met een 8 mm boor. We boren een gat in het oor achter de elektromotor met een 3,2 mm boor
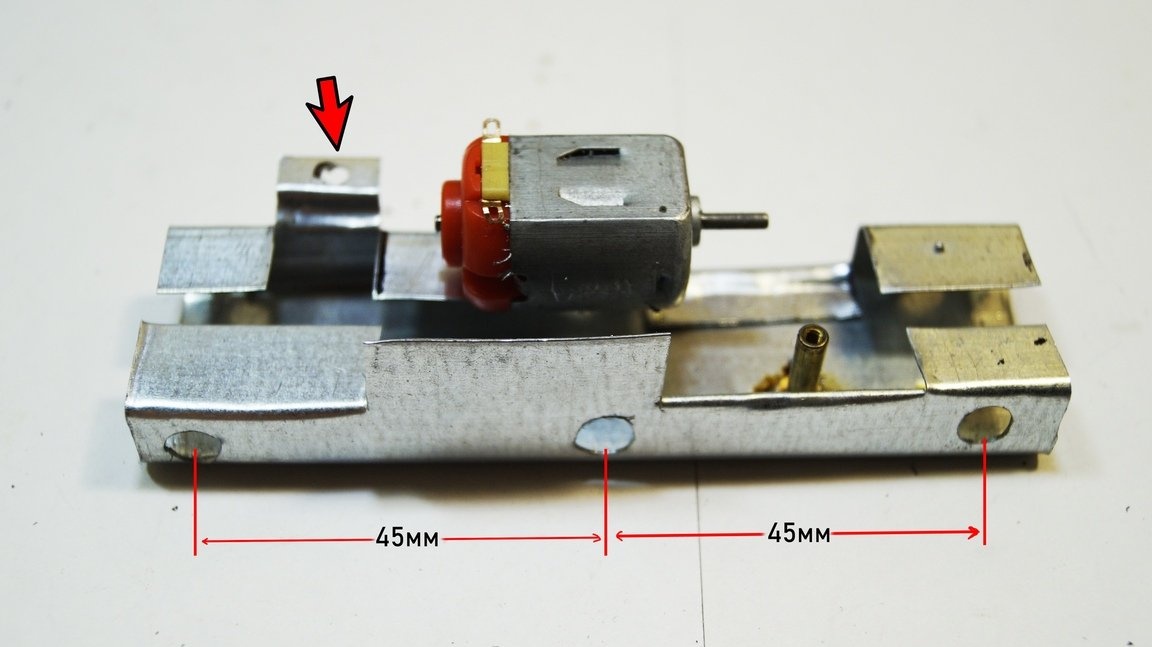
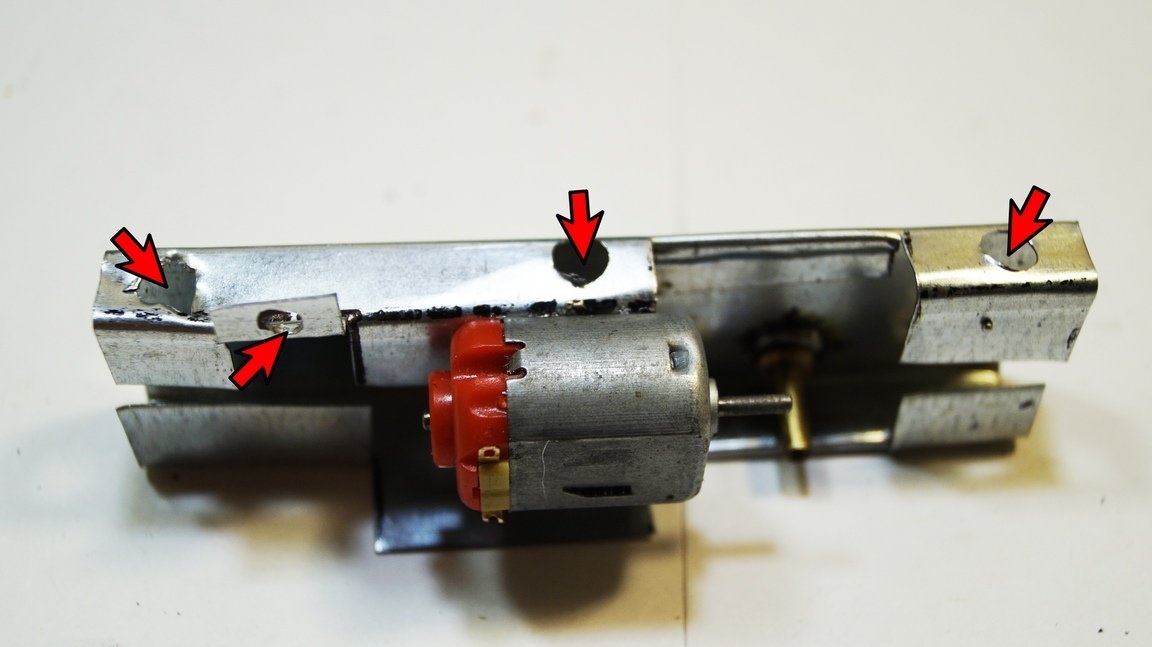
We solderen ook een moer in het oor achter de elektromotor. De hendel die verantwoordelijk is voor het optillen van de middelste poten langs de verticale as, wordt aan deze moer bevestigd
Om het frame-ontwerp te versterken, werden verstijvers gesoldeerd met een 2,5 mm koperdraad.
8 mm bussen werden ook gesoldeerd aan de bevestigingspunten van de kakkerlakpoten Foto 15.
4. Poten van een kakkerlak.
Als kakkerlakpoten werd een metaaldraad met een diameter van 3 mm gebruikt, deze is aan de kop van de M6-bout gesoldeerd Foto 16. Het middelste paar kakkerlakkenpoten is anders gemaakt, in de boutkop wordt een gat geboord langs de diameter van de draad. De draad is gebogen in de vorm van de letter "S", hierdoor kunnen de poten van de kakkerlak verticaal bewegen Foto 17.
Foto 16.
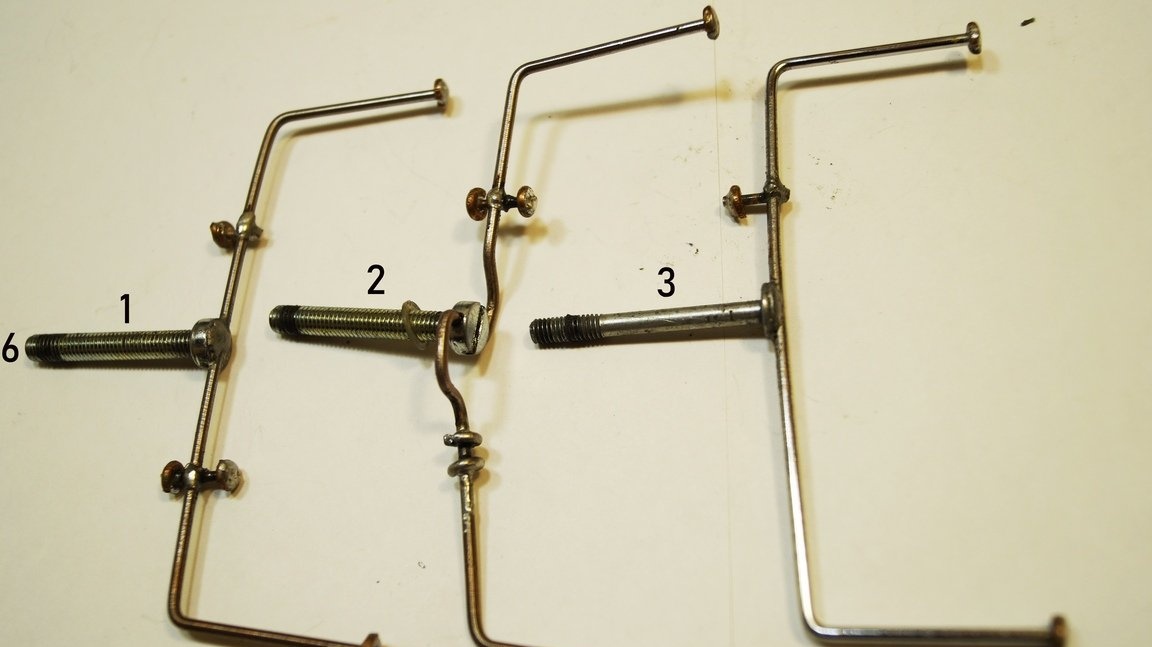
Foto 17.

Om de staven te bevestigen, wordt een koperdraad met een 2,5 mm lang gedeelte van 12 mm lang aan de poten van de kakkerlak gesoldeerd, koperen ringen worden aan de uiteinden gesoldeerd. De staven zijn gemaakt van koperdraad met een doorsnede van 2,5 mm, de afmetingen zijn bij benadering, het is raadzaam om de draad te buigen zodat er in de toekomst de mogelijkheid is om langs de lengte van Foto 18 af te stellen.
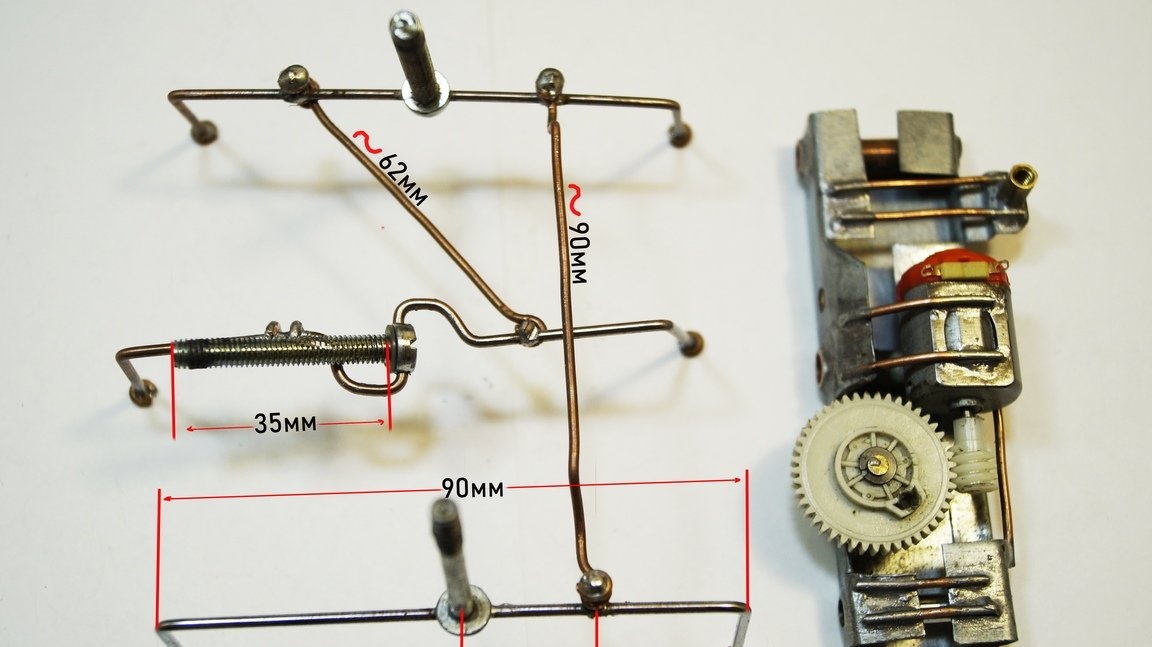
Foto 19 toont een onderaanzicht, met poten gemonteerd op het frame.
We zorgen voor tractie van het krukmechanisme tot de voorpoten van de kakkerlak. We doen een stoot met een zoom voor de mogelijkheid om het aan te passen. Krukradius 8 mm Foto 20.
We maken een hendel om de middelste poten verticaal te verplaatsen van koperdraad Foto 21.22.
Hiermee is het mechanische deel van de kakkerlak voltooid.
Foto 21.

Foto 22 toont de locatie van de poten op de onderste positie van de as van het krukmechanisme.
Foto 22.

5. Het elektrische gedeelte.
Lijm het batterijvak op een dubbelzijdige tape op het frame van de kakkerlak. Lijm de aan / uit-knop op het batterijvak. We solderen alle elementen van Foto 23.
De robot - de kakkerlak is klaar !!!