

Gitaar pickup windingen zijn anders. Win minder beurten - vervorming is klein, maar er kan een voorversterker nodig zijn. Meer terugspoelen - de amplitude zal zo veel toenemen dat u zonder voorversterker kunt, maar de vervorming zal toenemen. Kies een pickup, afhankelijk van welk stuk elektrische gitaar je wilt spelen. En om automatisering te instrueren om opwikkelwikkelingen te wikkelen zelfgemaakt, uitgevonden door de auteur van Instructables onder de bijnaam TheBigSuleskey.
Het apparaat is ontworpen om kant-en-klare frames te gebruiken, maar kan opnieuw worden uitgevoerd om met andere te werken, inclusief 3D-geprint. De wikkeldraad wordt opgewonden met een op de tafel bevestigde spoel, gaat door een ring en een verticale geleider met verschillende gaten en wordt vervolgens rond een roterend frame gewikkeld:

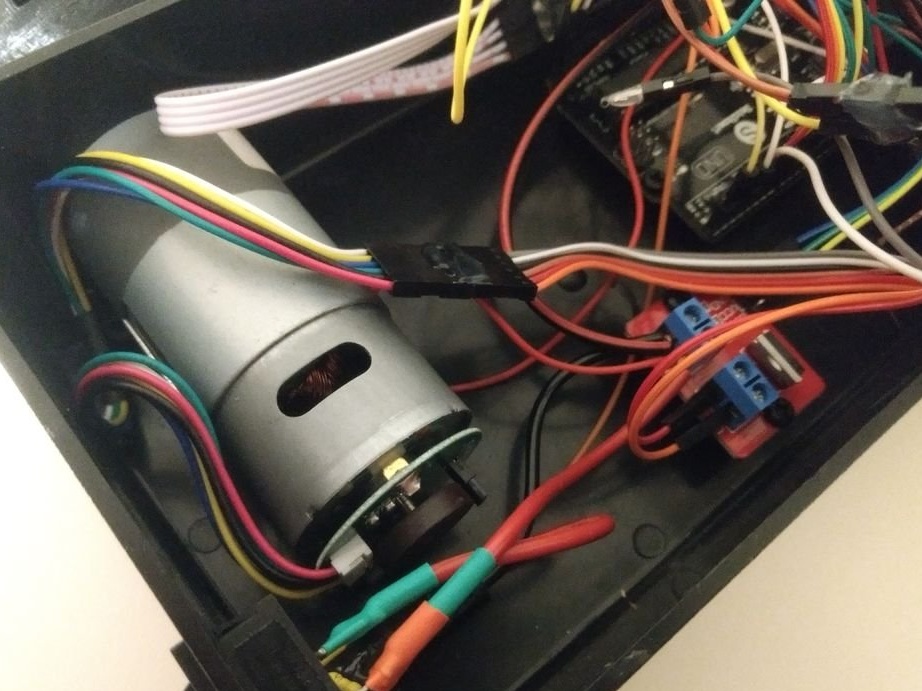
De haspel is gemonteerd in een PVC-behuizing met afmetingen 200x120x65 mm met rubberen poten, het meest omvangrijke onderdeel van het apparaat is een 12-volt gelijkstroommotor met een positiesensor YC-52010. Het wordt bestuurd via de power driver vanaf het bord Arduino Uno of compatibel. Informatie wordt ingevoerd via vier knoppen en een variabele weerstand van 10 kilo-ohm en uitgevoerd naar een 16x2-scherm met een seriële interface. Het diagram toont een module om een conventioneel beeldscherm op de HD44780 om te zetten in een serieel. Het is ook mogelijk om via Bluetooth uit te wisselen via de HC06 module, maar dit is een extra optie.
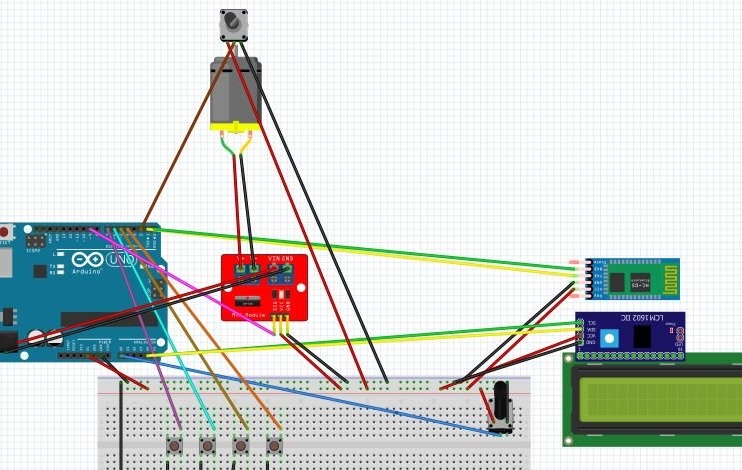
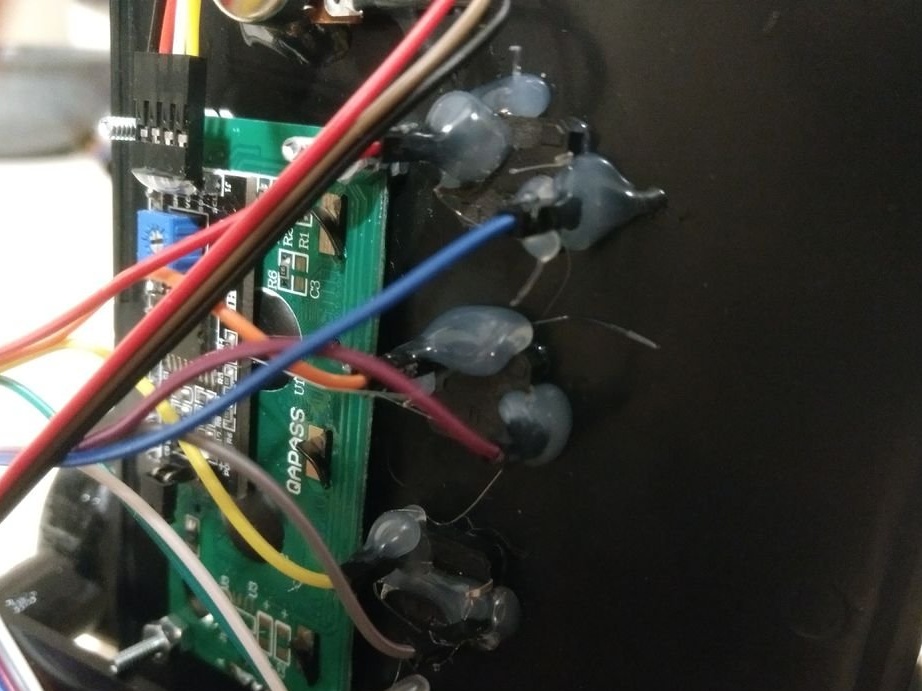
De knoppen trekken, wanneer ingedrukt, de digitale ingangen van de Arduino naar de gemeenschappelijke draad, het zou leuk zijn om dezelfde conclusies te trekken met de plusweerstanden, dit zal de immuniteit voor ruis verbeteren, maar TheBigSuleskey deed dat niet. De variabele weerstand is verbonden met de plus en de gemeenschappelijke draad met de laterale aansluitingen, en met de analoge ingang 0 als de middelste, dus de spanning op deze ingang verandert soepel van 0 tot 5 V ten opzichte van de gemeenschappelijke draad.
Alles wordt gevoed door een 12 V voeding van een netbook (laptops werken niet, er is meestal 19 V). Omdat netbooks tegenwoordig niet erg gebruikelijk zijn, is een voeding voor een ledstrip geschikt, zodat deze ook ongeveer 4 A kan geven.Een router is mogelijk niet geschikt, van 1 tot 2 A daar kan de motor traag werken door doorhangen van de spanning. Arduino en de motordriver zijn parallel (vergeet de polariteit niet), terwijl alle componenten op het Arduino-bord worden gevoed door een spanning van 5 V via een daar geïnstalleerde stabilisator. Sommige moderne compatibele moederborden hebben geen stabilisator, dan moet je het bord via een lineaire stabilisator op de 7805-chip of een pulsstabilisatorbord (meestal op de MC34063A-chip) aansluiten om in de sigarettenaansteker te laden. Het maakt niet uit waar de stabilisator zich bevindt - direct op de Arduino of afzonderlijk - de Bluetooth-module, het display, de positiesensor en de interfaceconverter van serieel naar parallel worden erdoor aangedreven.
De meester soldeerde een stekker aan het uitgangssnoer van de voedingseenheid, die bestand is tegen de stroom die door het hele circuit wordt verbruikt, en installeerde een daarvoor geschikte aansluiting in de behuizing. De bestuurder en Arduino verbond hij via een schakelaar. Ook het stopcontact en de schakelaar moeten deze stroom weerstaan.
In Arduino heeft hij dit geüpload, het is zonder Bluetooth-ondersteuning, als je er een nodig hebt, moet je zelf de nodige wijzigingen aanbrengen. En als Bluetooth niet alleen niet nodig is, maar ook niet gepland, kan de bijbehorende module helemaal worden weggelaten. Als de motor in de verkeerde richting draait, moet deze worden omgekeerd, als de snelheidsregelaar in de tegenovergestelde richting werkt, moeten de omgekeerde klemmen van de variabele weerstand worden omgekeerd. Na op het breadboard te hebben getest hoe alles samenwerkt, verwijderde TheBigSuleskey het en verbond alles volgens hetzelfde schema, maar door te solderen.
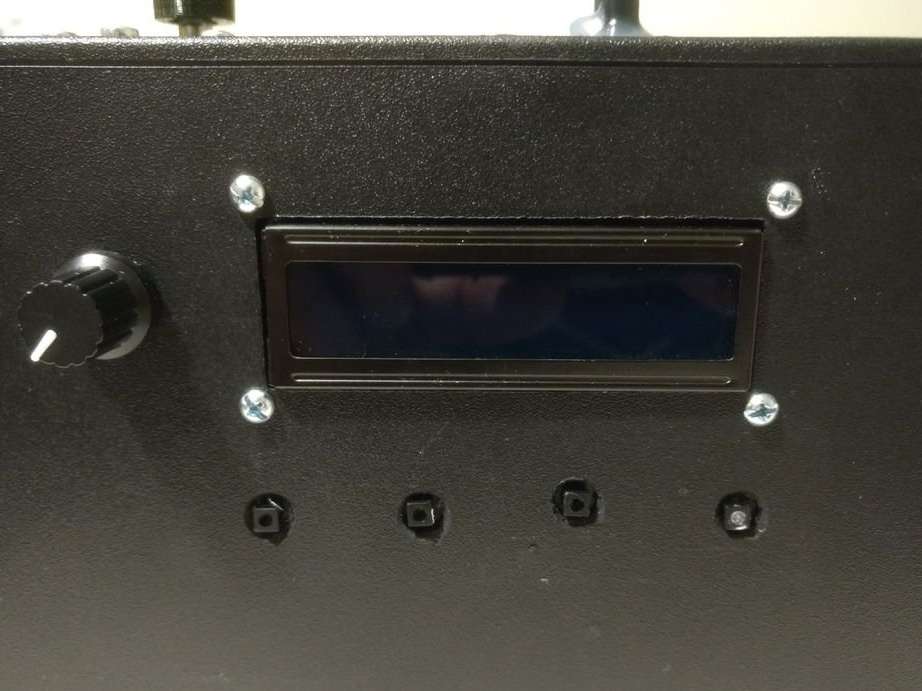
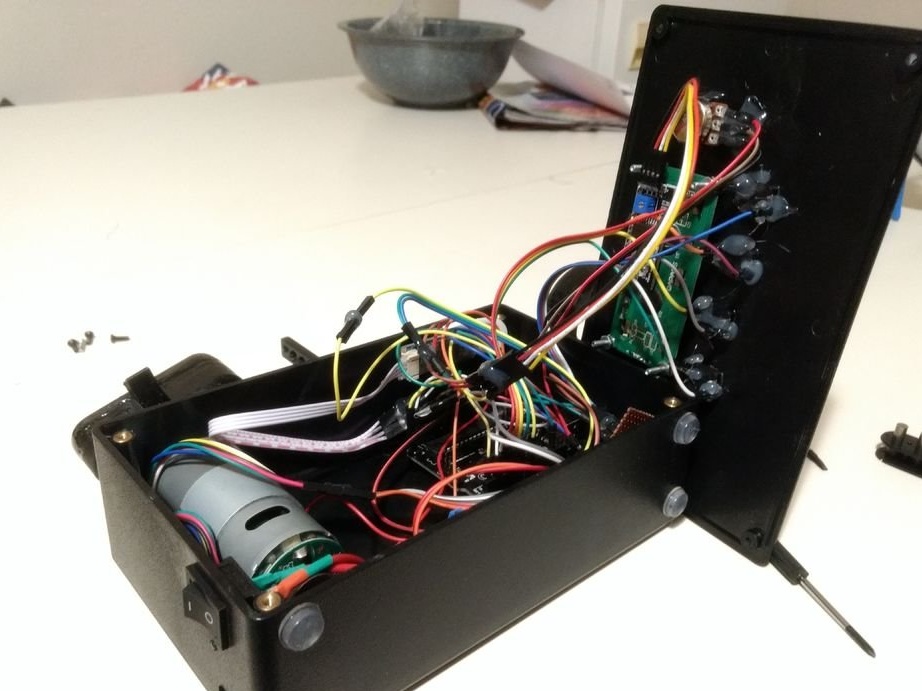
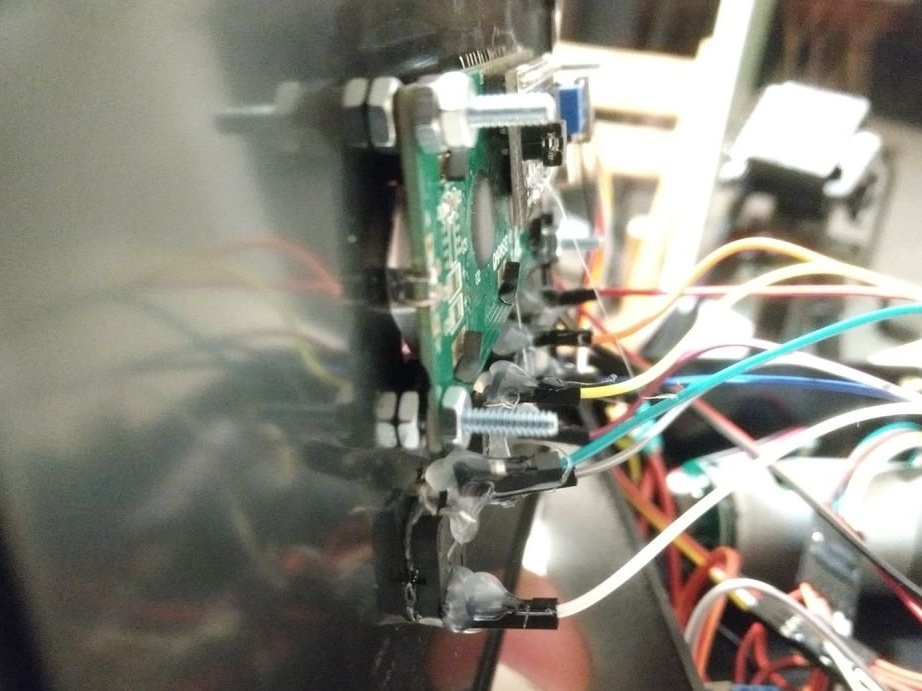
In het geval maakte de meester gaten voor de knoppen, schakelaar, stopcontact, motoras, variabele weerstand, enz. Hiervoor gebruikte hij handgereedschap, omdat de lasersnijder hiervoor niet geschikt is, maar alleen met een zeer krachtige kap: PVC stoot meer rook uit dan andere kunststoffen. Hij verlijmde het stopcontact met epoxy en zorgde ervoor dat het niet naar binnen kwam. En de Arduino USB-aansluiting was een beetje ingediend. Rubberen poten zijn vereist, zonder deze zal het lichaam willekeurig rond de tafel rijden. Hier wordt het voltooide ontwerp van verschillende kanten getoond met reeds geïnstalleerde 3D-geprinte onderdelen, daarover later meer.


Elementen van het circuit met moeite, maar kwamen in de zaak:

U kunt elk plastic meenemen voor 3D-printen. De vulling is klein, maar de wanden zijn dikker zodat er een marge is voor later handmatig slijpen. Verwijder jumpers van gedrukte onderdelen.
Bestanden voor het afdrukken van de ring en de geleider met gaten worden niet weergegeven. Het mondstuk op de motoras bestaat uit drie delen:, en. Door ze samen te voegen, zorgde de meester ervoor dat het onderste deel aan het bovenste deel vastplakte, maar kwam niet op de bewegende lijm. Voordien plaatste hij vulpennen in de corresponderende gaten in het onderste deel van de veer en magneten in de uitsparingen van de beweegbare. Bij het voltooide mondstuk verwarmde hij het gat voor de motoras lichtjes met een föhn zodat het plastic zachter werd, de hele structuur op de as legde en liet afkoelen. Daarna is het apparaat klaar voor inspectie en gebruik.