
Hallo voor alle elektronicaliefhebbers. In dit artikel vertel ik je hoe je een robot voor zoekmachines maakt die langs een zwarte lijn reist, die je kunt tekenen zoals je wilt. Ik weet zeker dat deze kitkit een zeer interessant speelgoed zal zijn voor degenen die het zullen verzamelen.
Ik trek niet lang, we gaan direct naar de productie.
Voordat ik het artikel lees, stel ik voor om een video te bekijken met een gedetailleerde montageprocessor voor deze kitkit, evenals de prestatiecontroles.
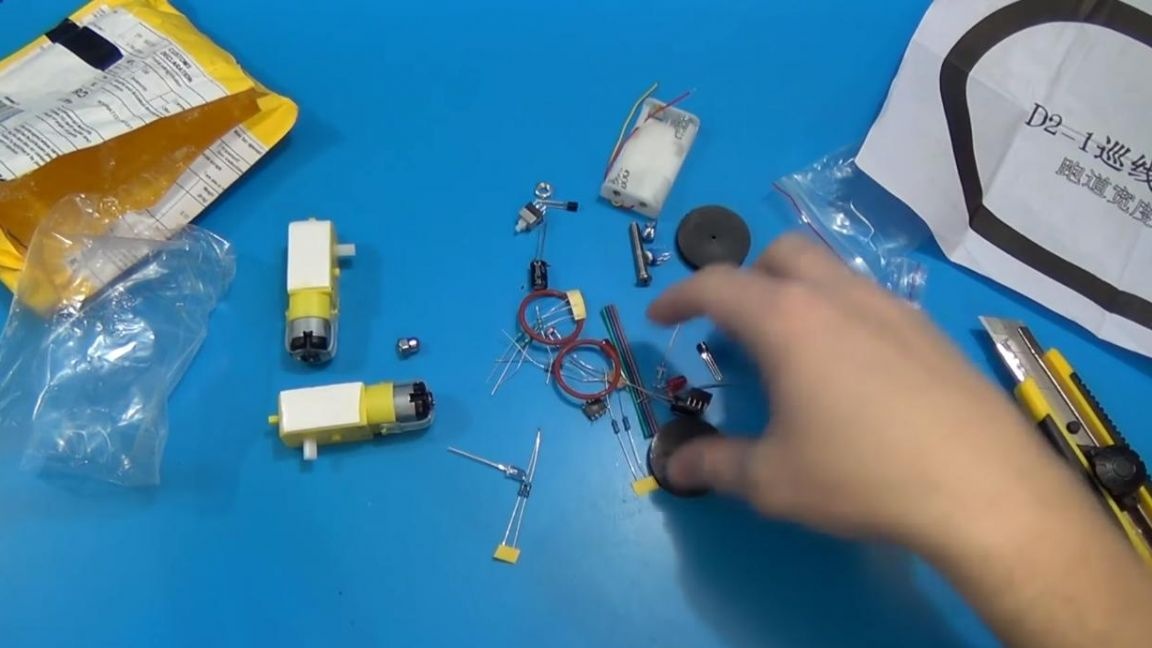
Om een zoekmachine robot te maken die langs de zwarte lijn reist doe het zelfheb je nodig:
* Kit
* Soldeerbout, soldeer, flux
* Zijsnijders
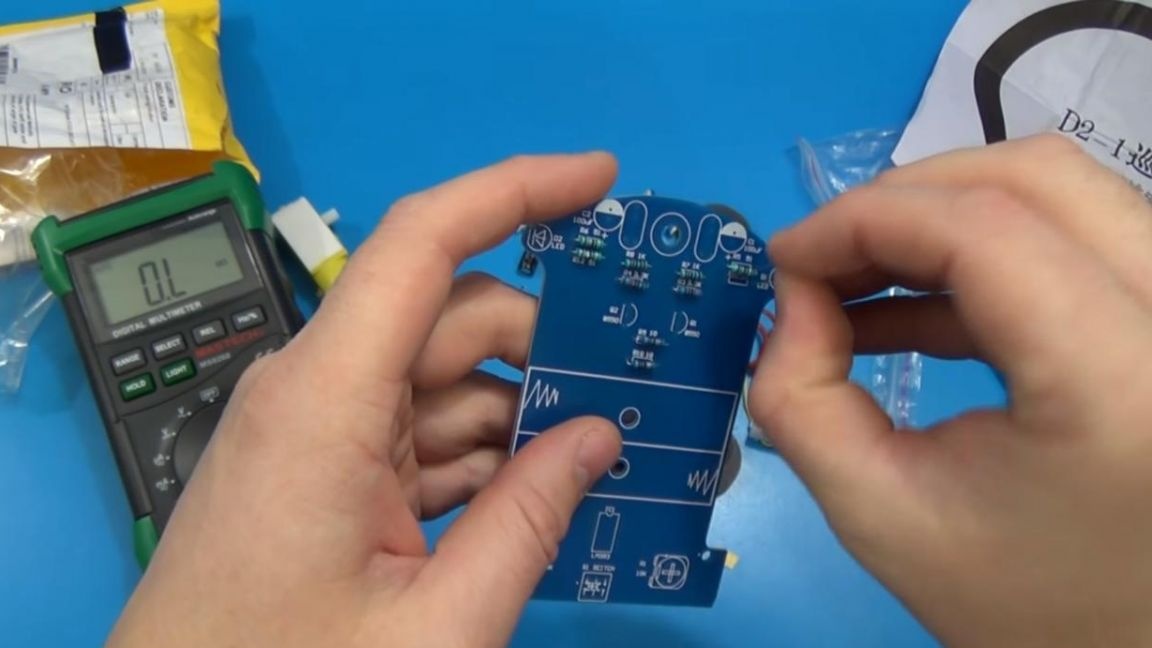
* Multimeter
* Armatuur om "derde hand" te solderen
* Tangen
* Kruiskopschroevendraaier
Eerste stap.
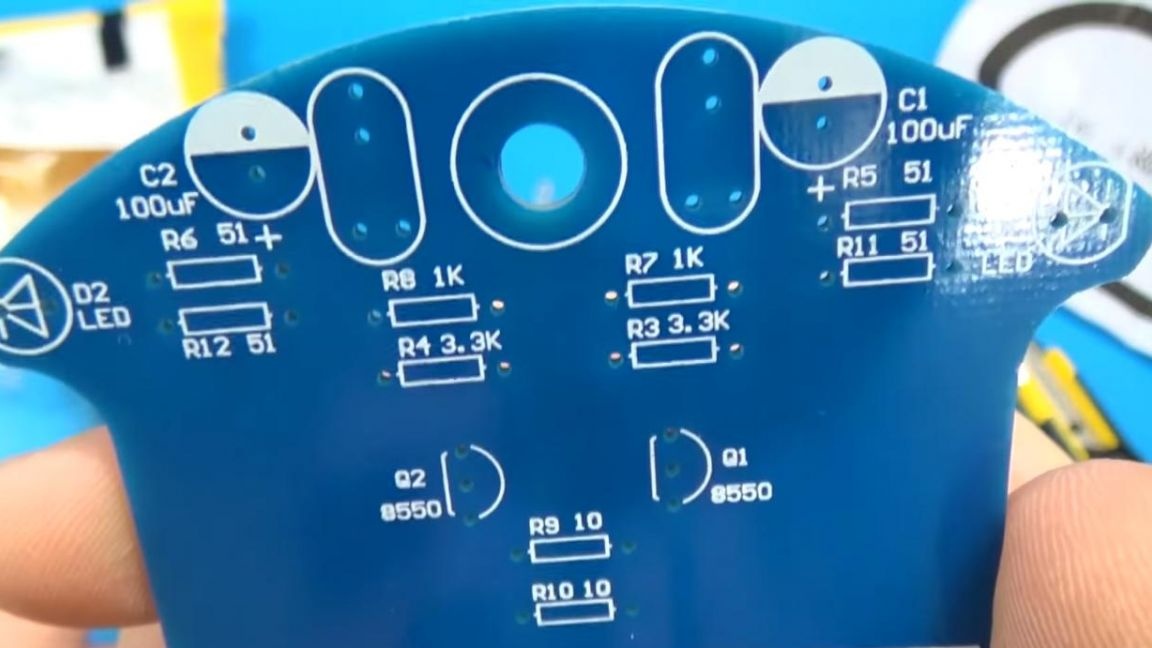
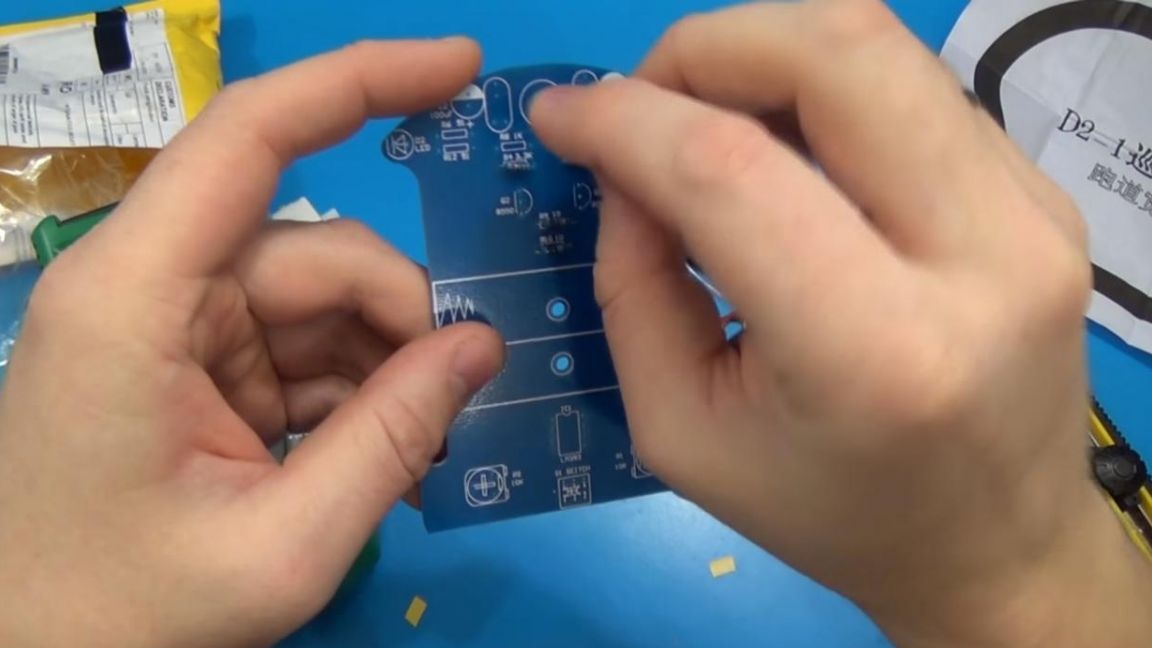
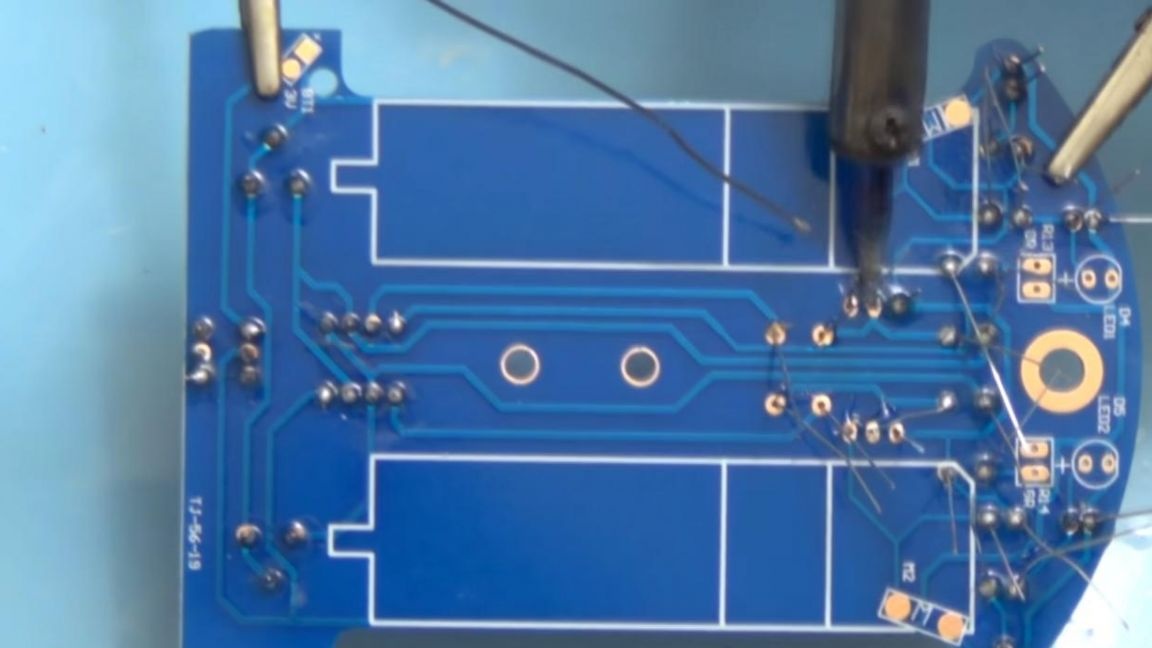
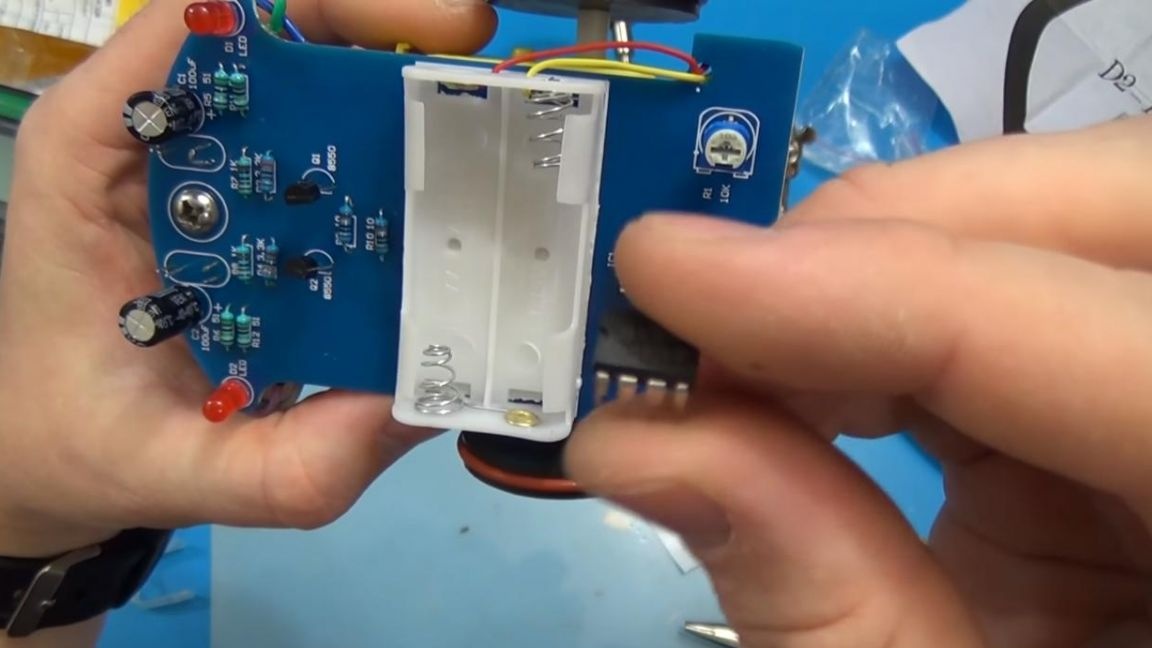
Allereerst moet je alle componenten op het bord plaatsen, de kit bevat zowel weerstanden, condensatoren als transistors.
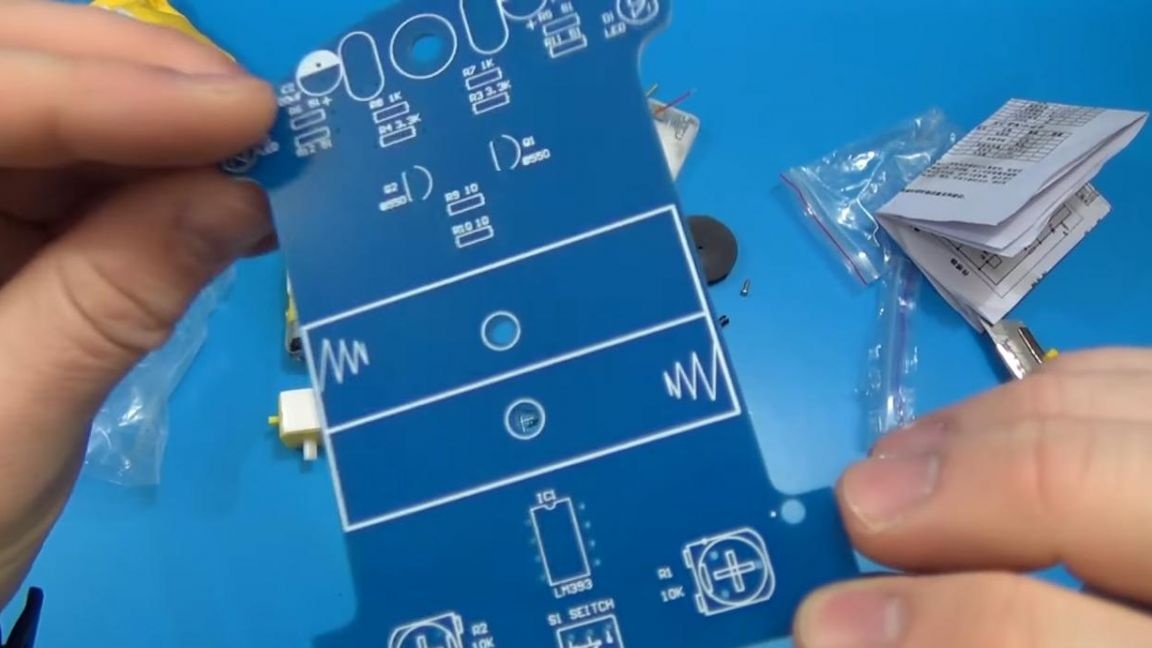
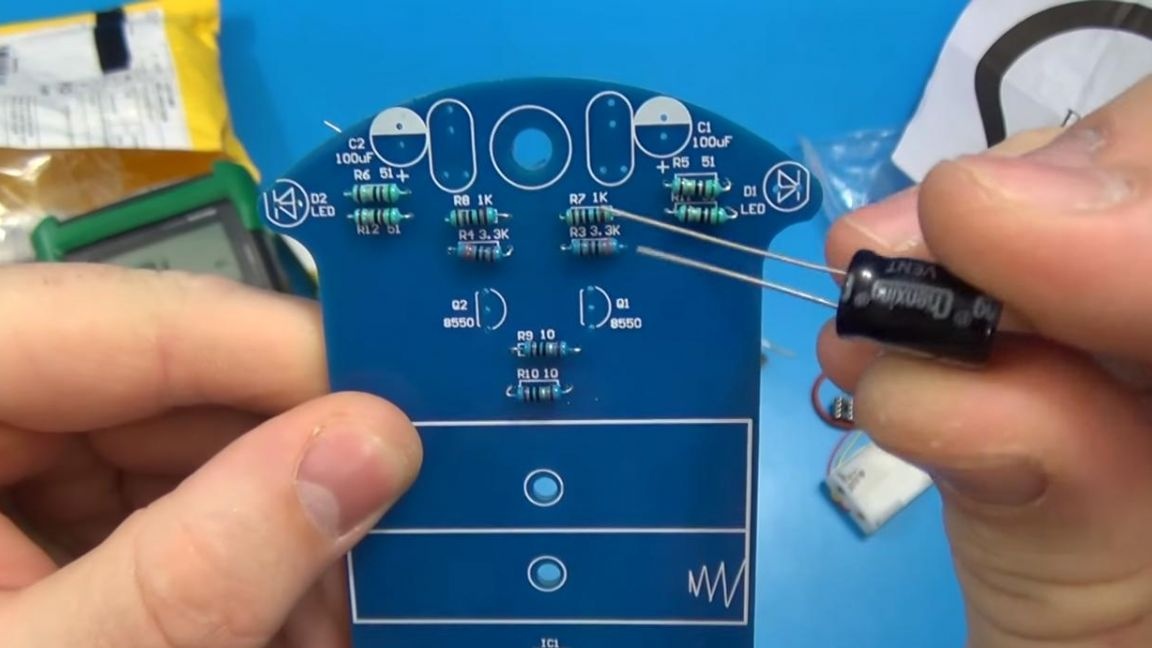
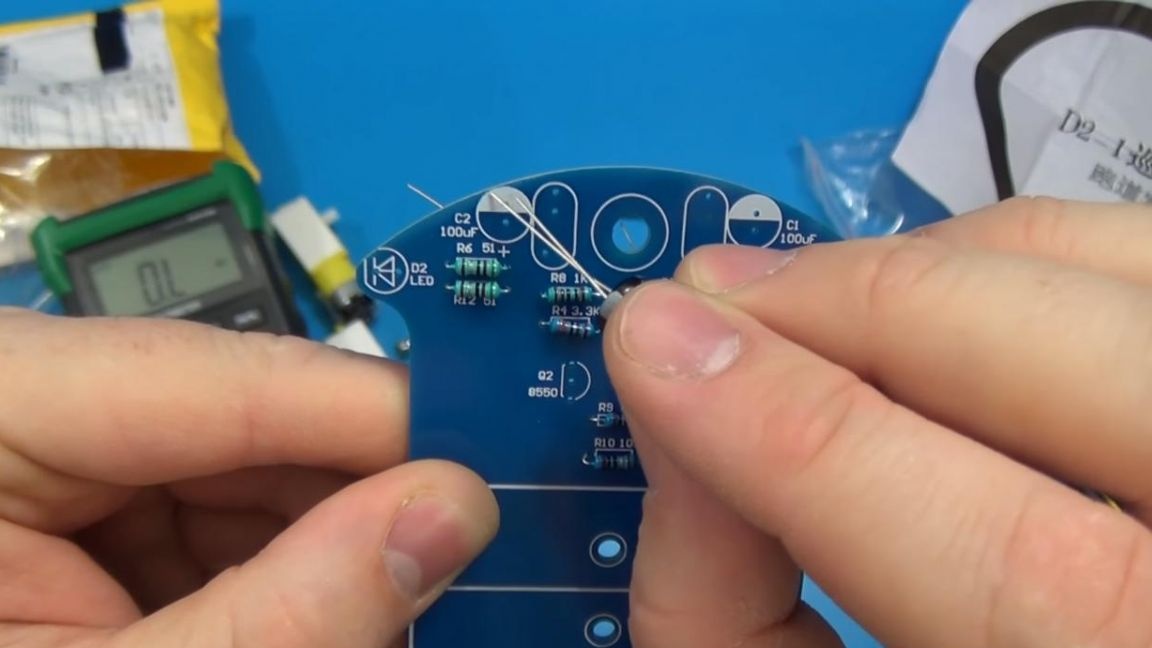
Eerst moet u de weerstanden op hun plaats installeren, waarvan de nominale waarde op het bord wordt aangegeven, terwijl de weerstanden zelf een kleurcode hebben, waarmee u de weerstand van een enkele weerstand kunt bepalen. Ook kan weerstand worden gemeten met een multimeter, deze methode zal sneller zijn, maar dit betekent niet dat het een must is. We rangschikken de weerstanden op het bord op hun nominale waarde, buig de terminals een beetje aan de achterkant, dit wordt gedaan zodat ze niet uitvallen tijdens het solderen.

Stap twee
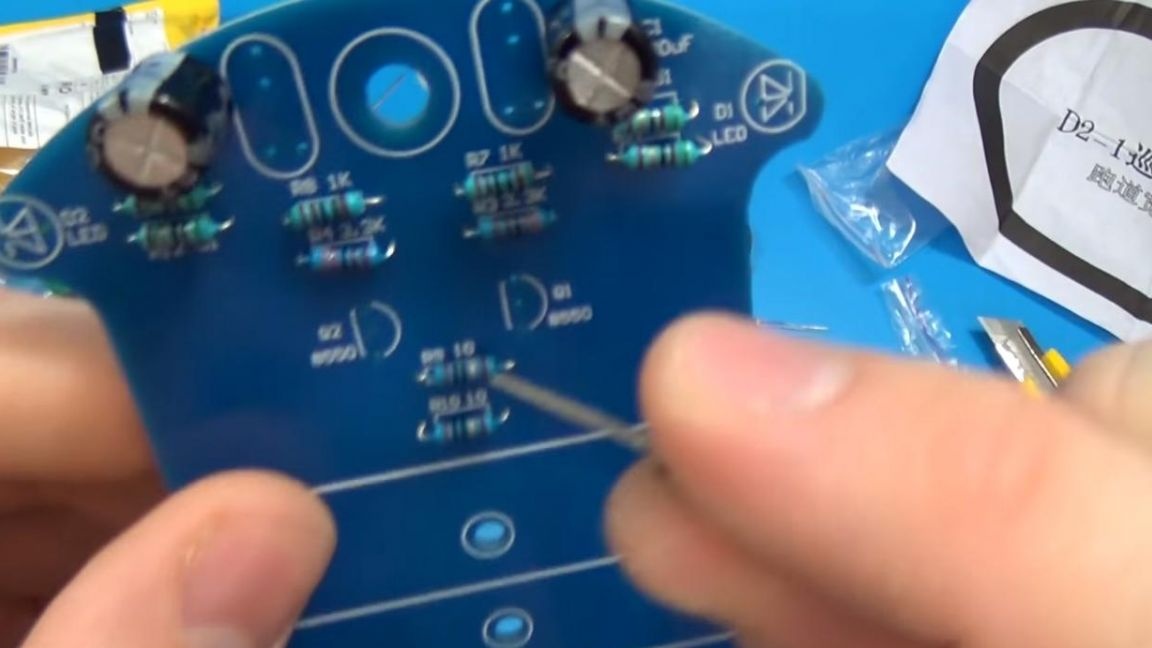
De weerstanden zijn allemaal op hun plaats, gevolgd door de condensatoren, in tegenstelling tot de vorige componenten, deze hebben polariteit. De min van de condensator wordt op zijn kast aangegeven door een witte strook met een streepje; op het bord wordt de min aangegeven door een gevulde witte halve cirkel.
Wanneer de condensatoren op hun plaats zijn, wenden we ons tot de transistors, ze zijn hetzelfde voor ons, dus we kunnen niet met elkaar in de war raken. Om ze goed op het bord te plaatsen, moet je het platte deel van de transistor combineren met een streepje op het bord.
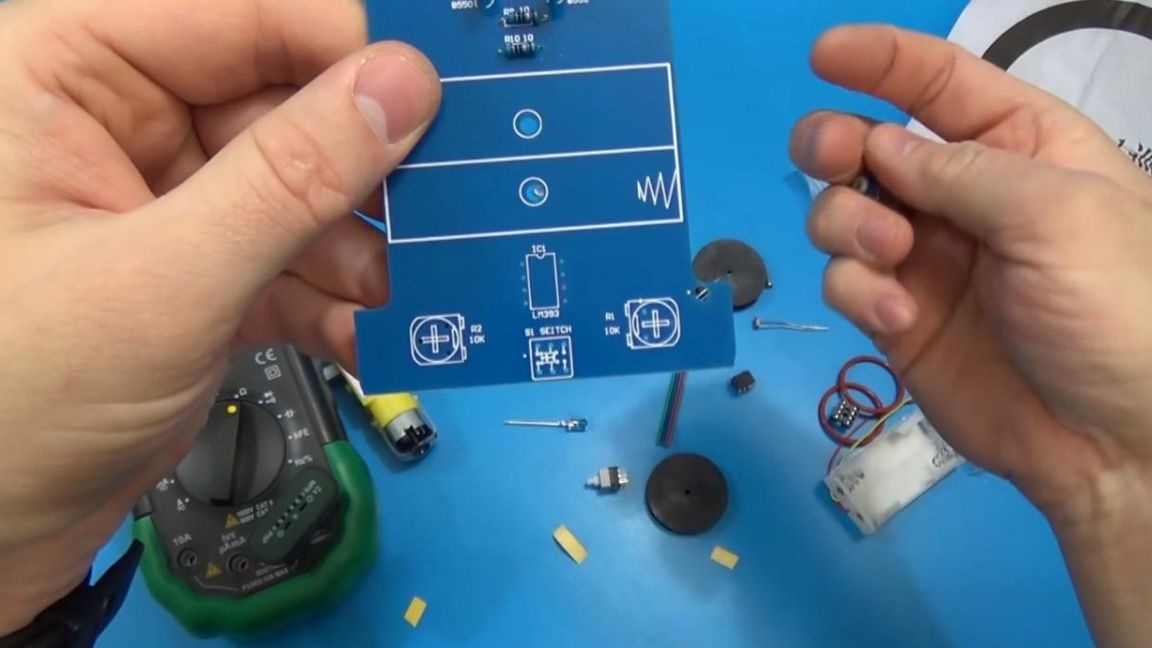
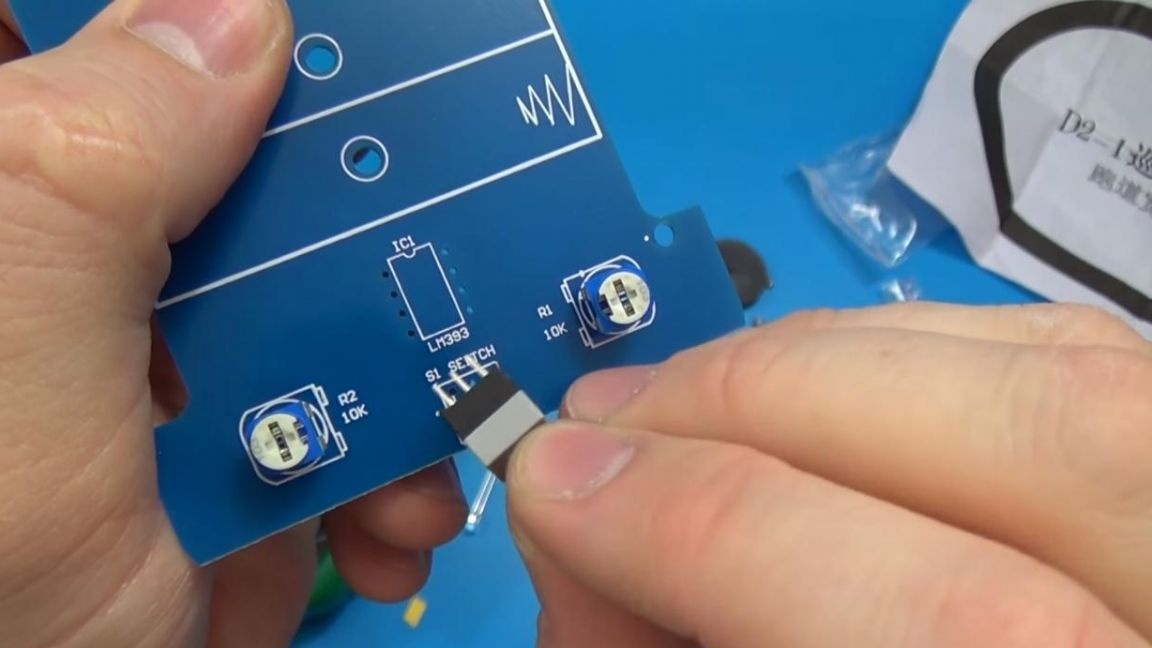
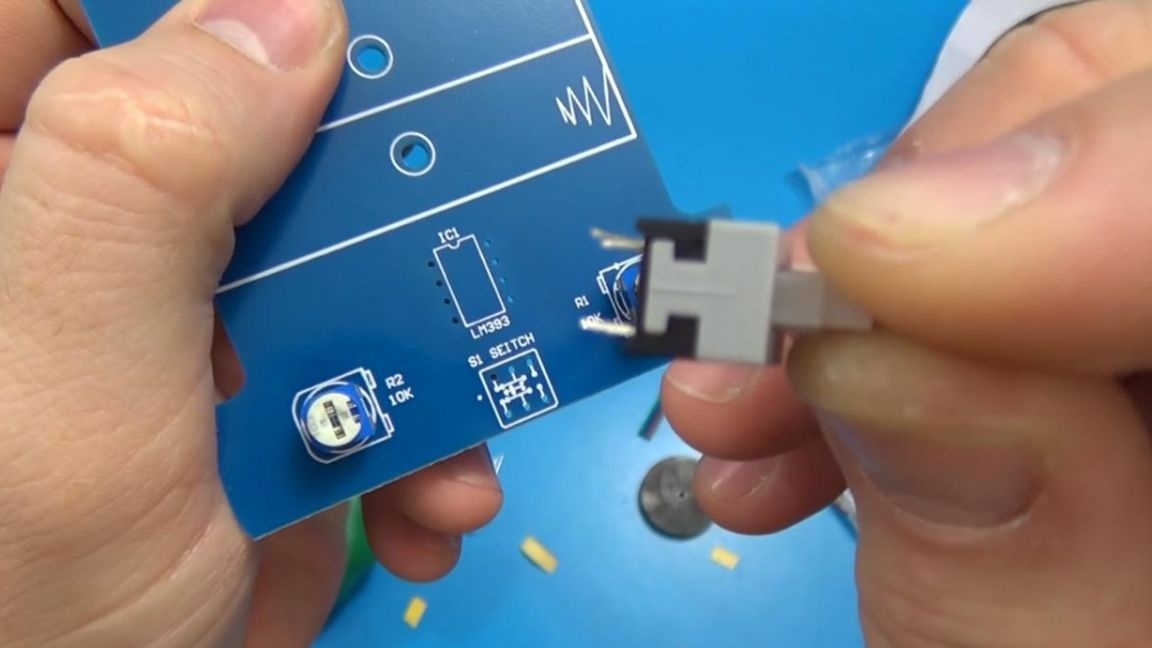
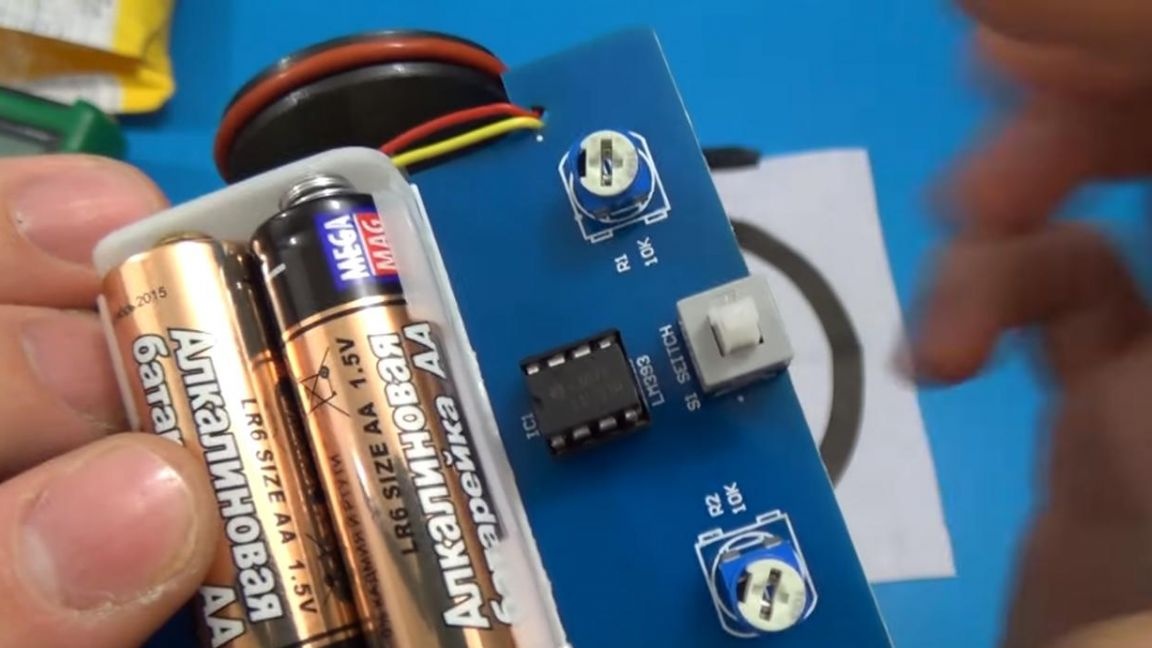
Vervolgens installeren we twee afstemweerstanden, in verband met de locatie van de terminals zal het niet werken om ze verkeerd te plaatsen, wat goed is. We plaatsen ook de aan / uit-knop, deze is aan-uit, dat wil zeggen, deze kan in de aan of uit-positie staan, de juiste locatie komt overeen met het samenvallen van de positie van de strip op de knop zelf met een punt op het bord.
Stap drie
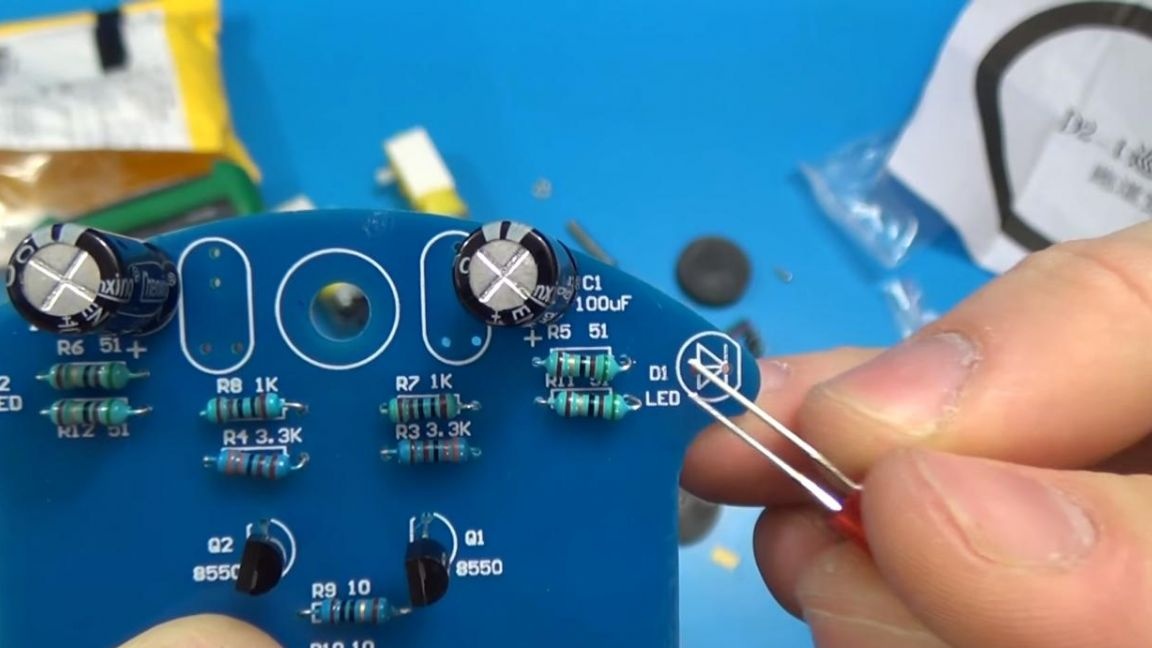
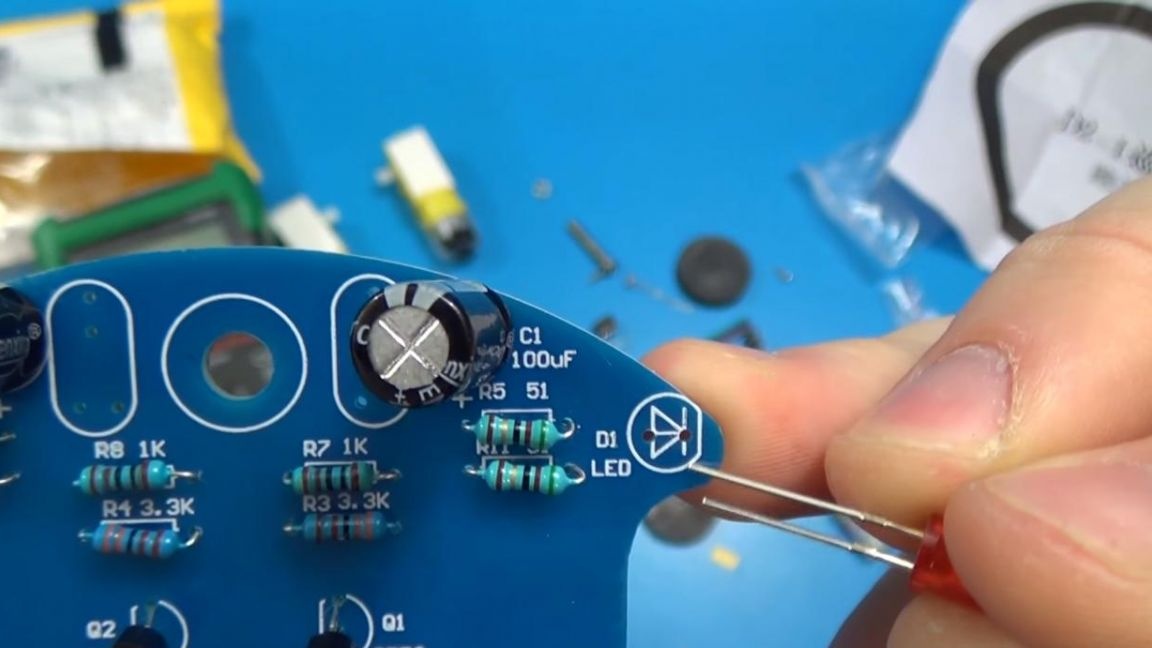
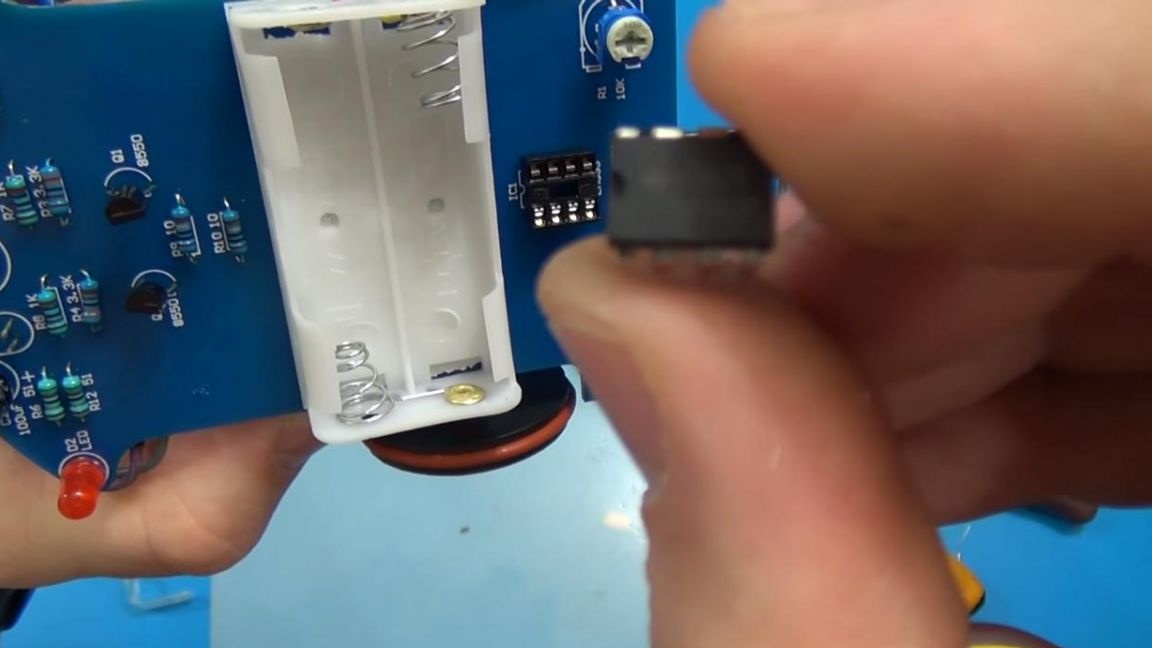
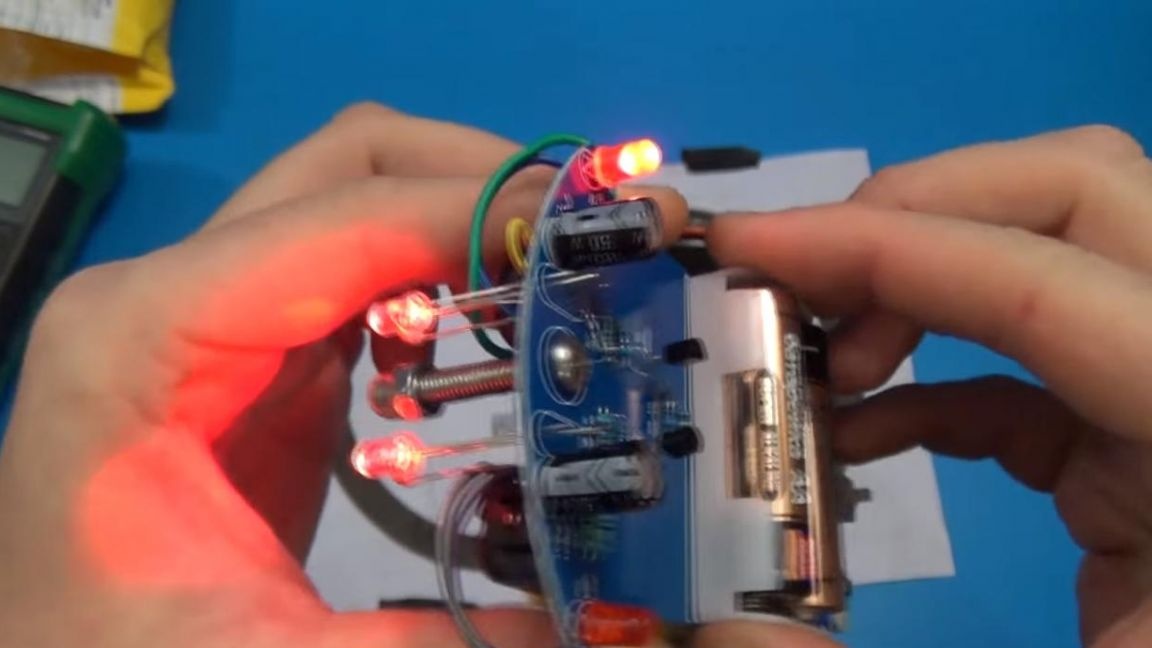
Tijd om met LED's om te gaan, er zijn er vier in de set, twee rode en twee witte. Op het bord wordt de plus aangegeven door een driehoek, op de led is het een lange output, met een min is alles duidelijk. We plaatsen de rode LED's erop, het zijn analogen van de "richtingaanwijzers".Er is een aparte plaats voor de microschakeling, we plaatsen de connector daar, dus het vervangen ervan zal in dat geval veel gemakkelijker zijn, maar de contacten raken niet oververhit tijdens het solderen.

Stap vier
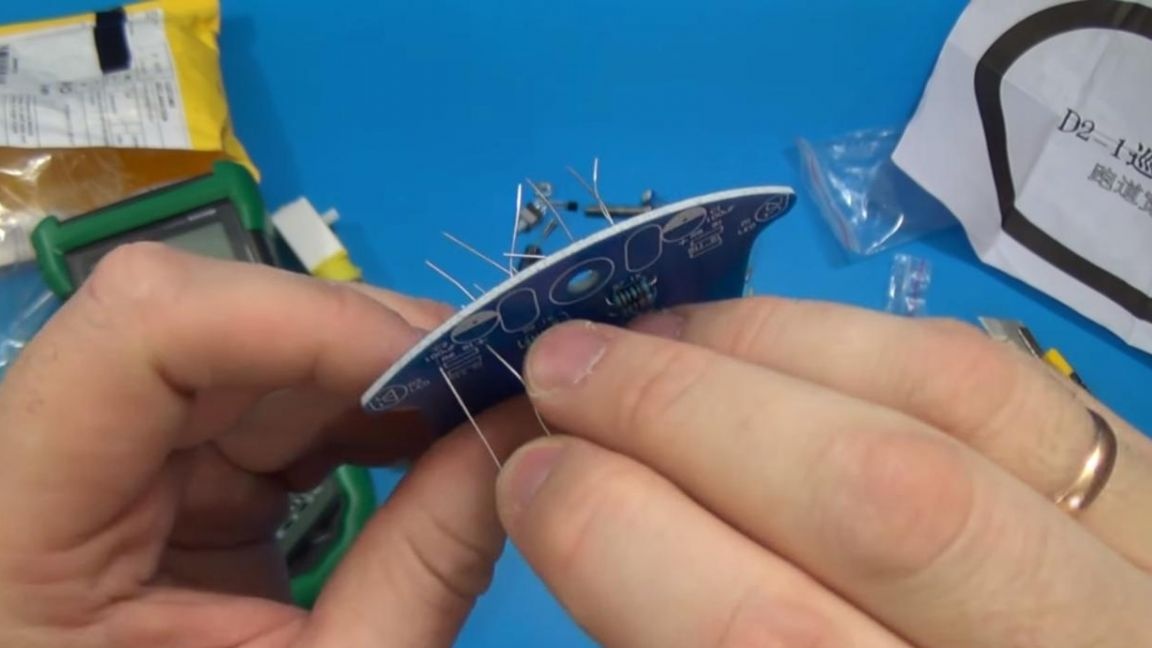
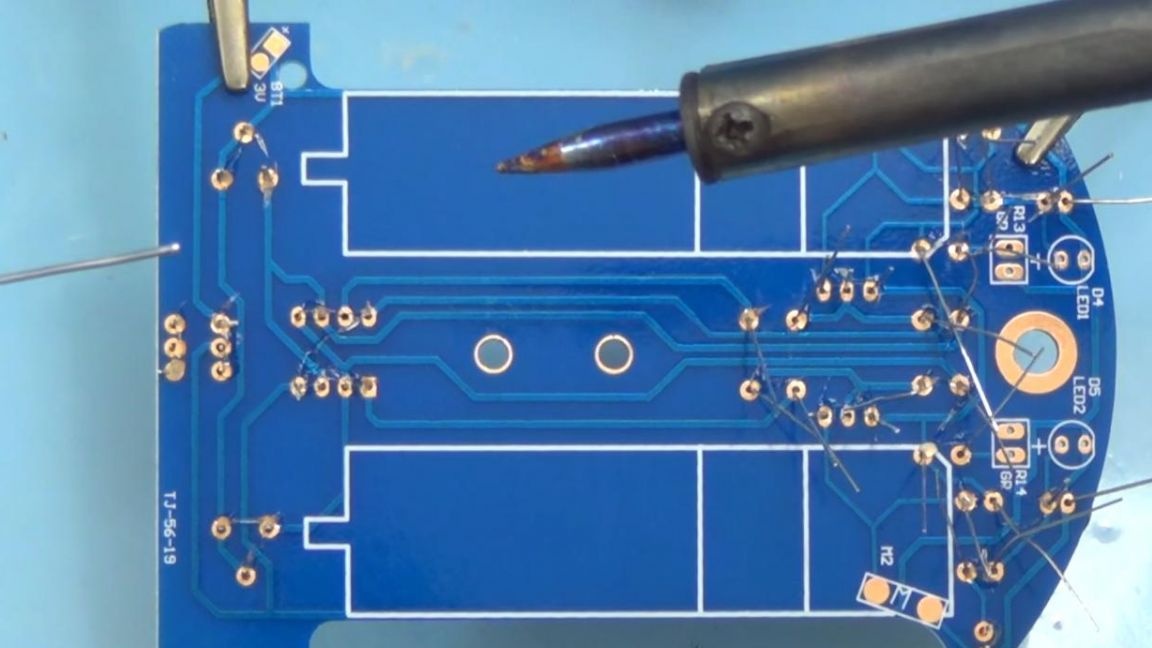
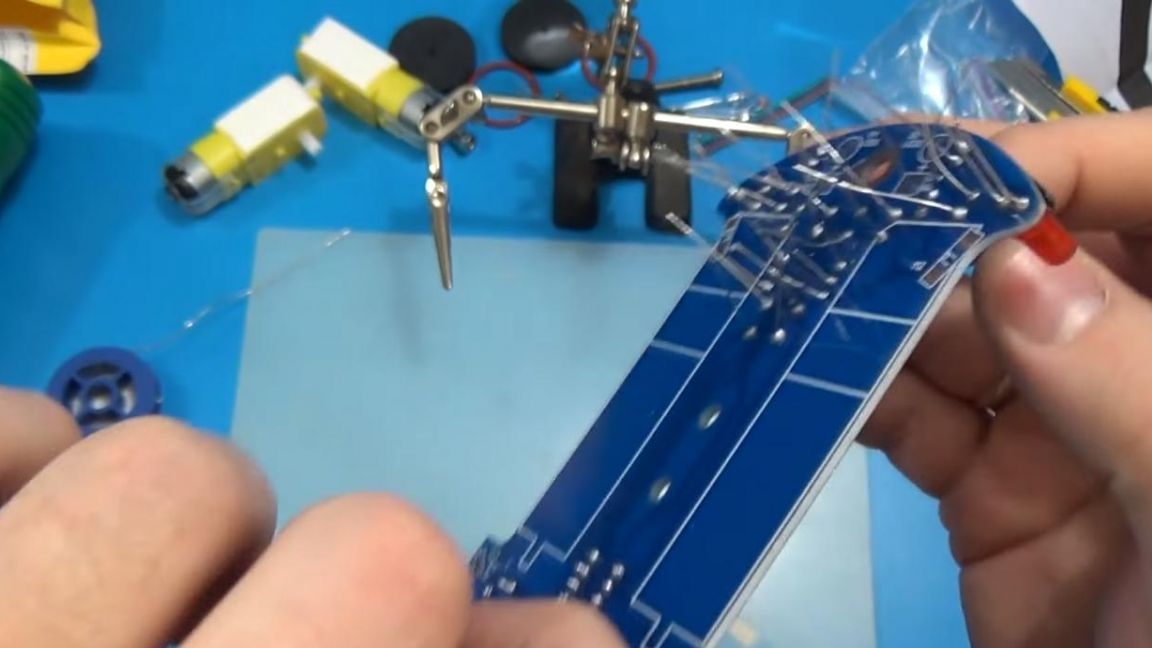
Het is tijd om de componenten op het bord te solderen, het in het derde soldeerapparaat te bevestigen, flux en soldeer toe te passen en het soldeer een beetje te voeden.
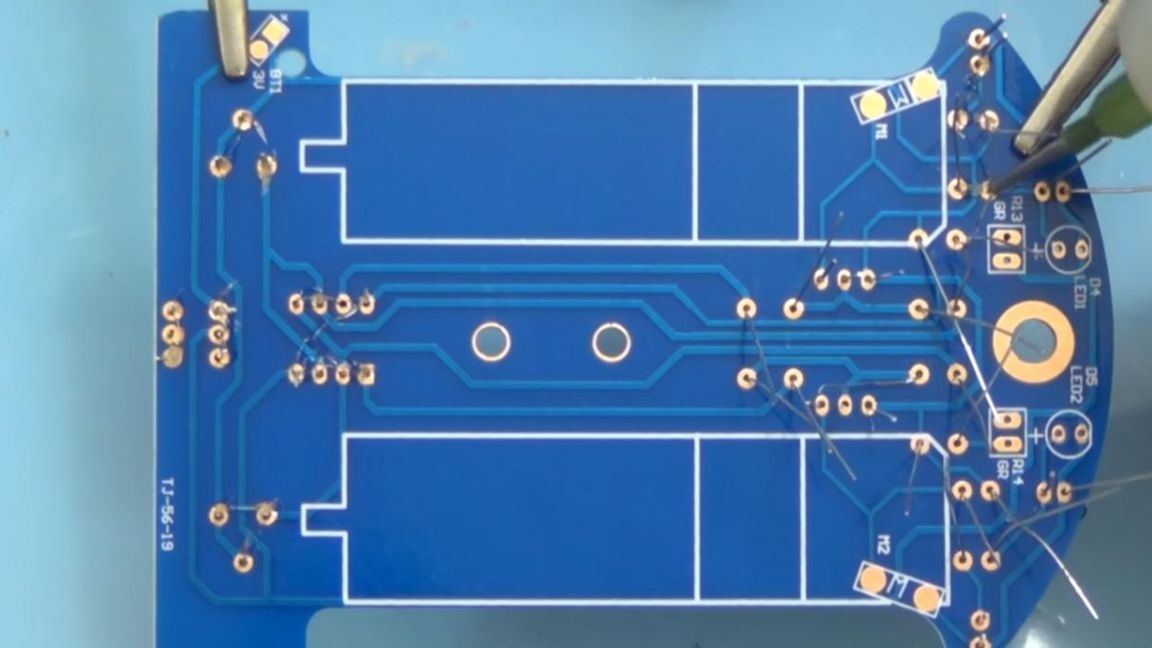
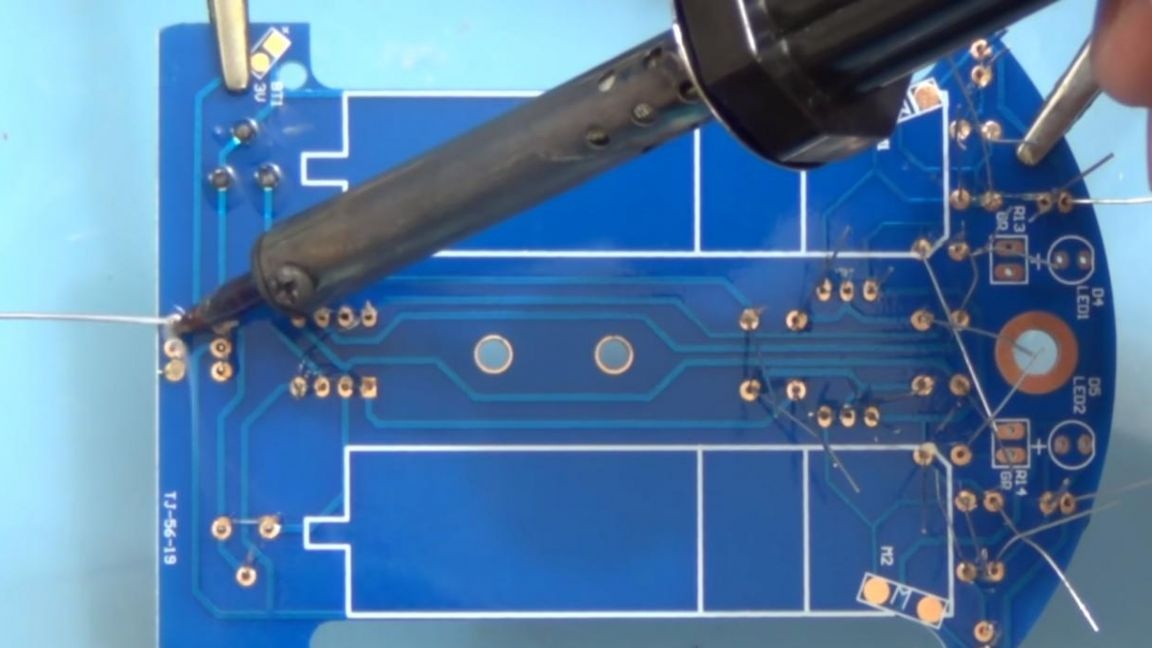
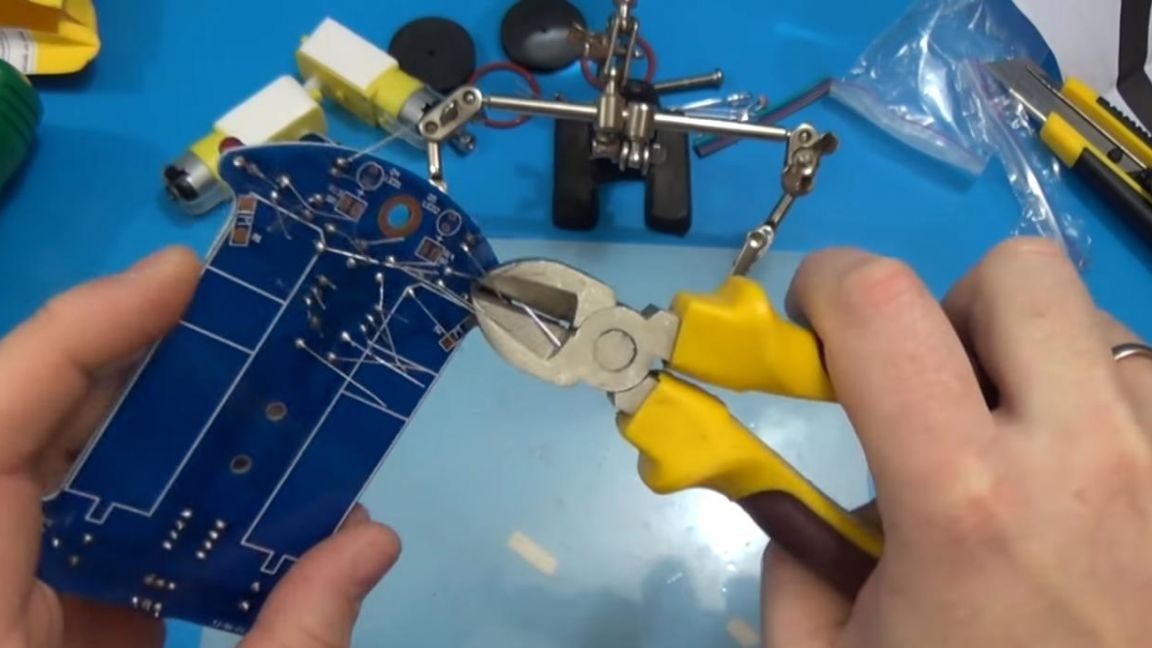
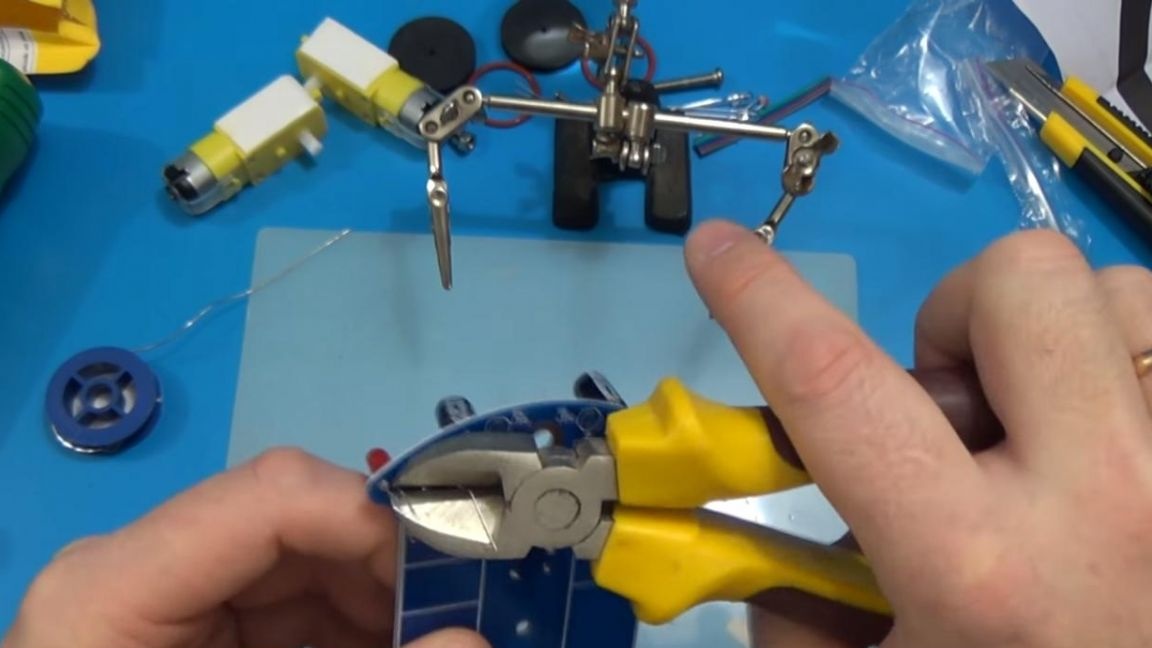
Na het solderen verwijderen we de overblijfselen van de conclusies met behulp van zijsnijders, maar wees voorzichtig, want het afscheuren van de contactvlakken en de sporen zelf is in dit stadium het gemakkelijkst.
Stap vijf
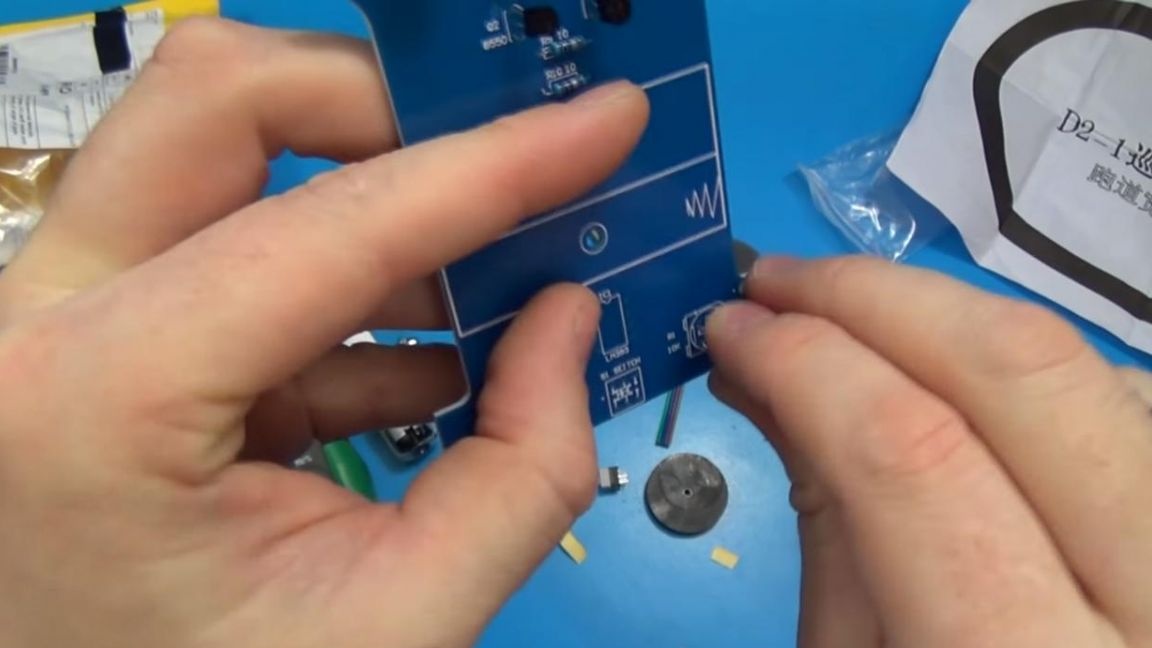
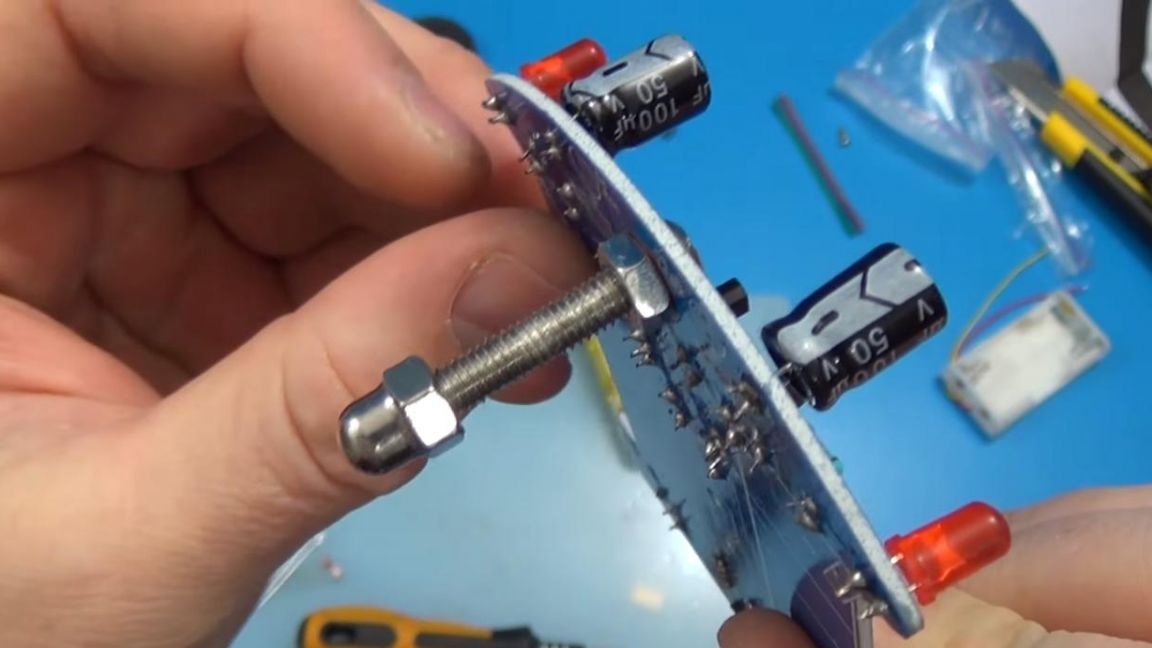
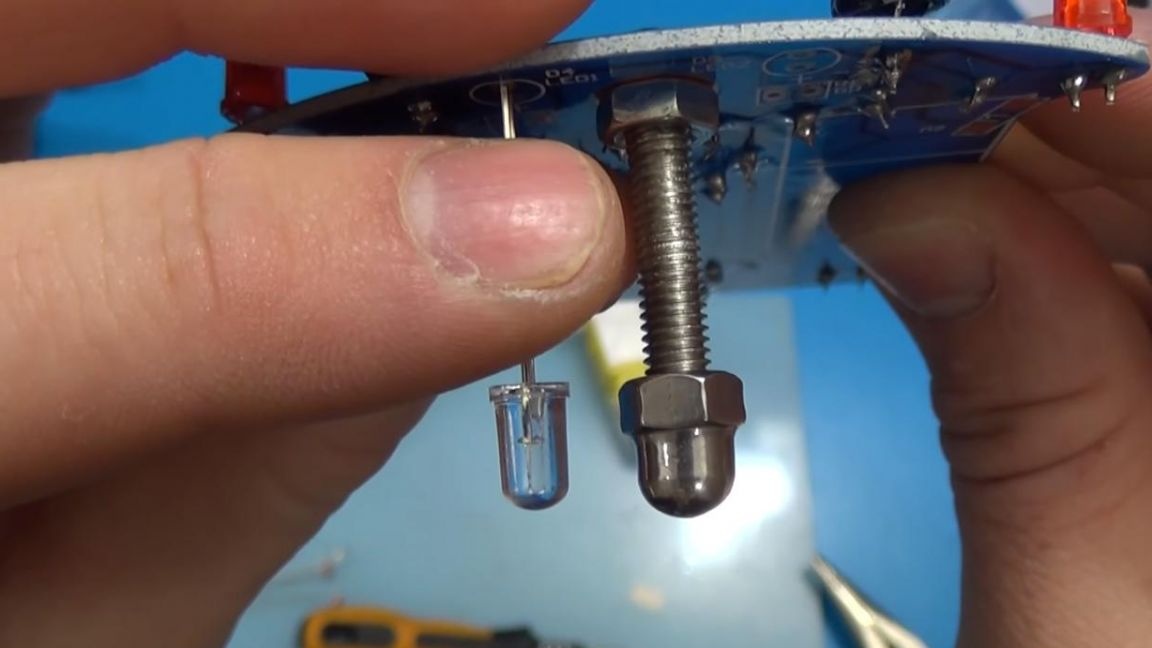
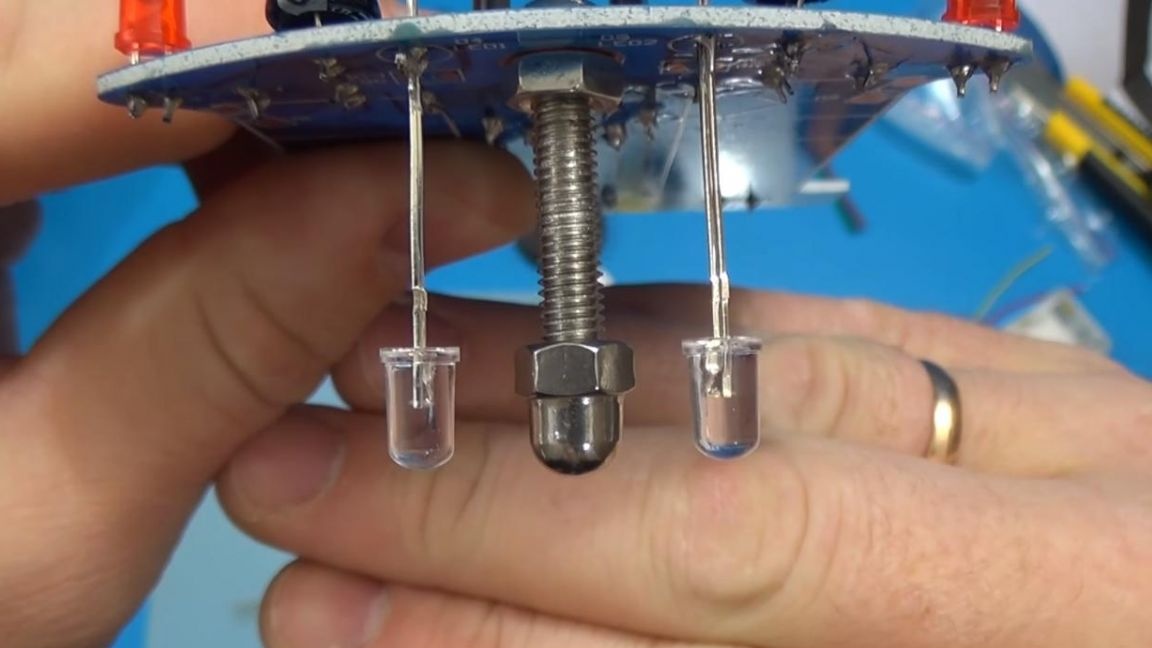
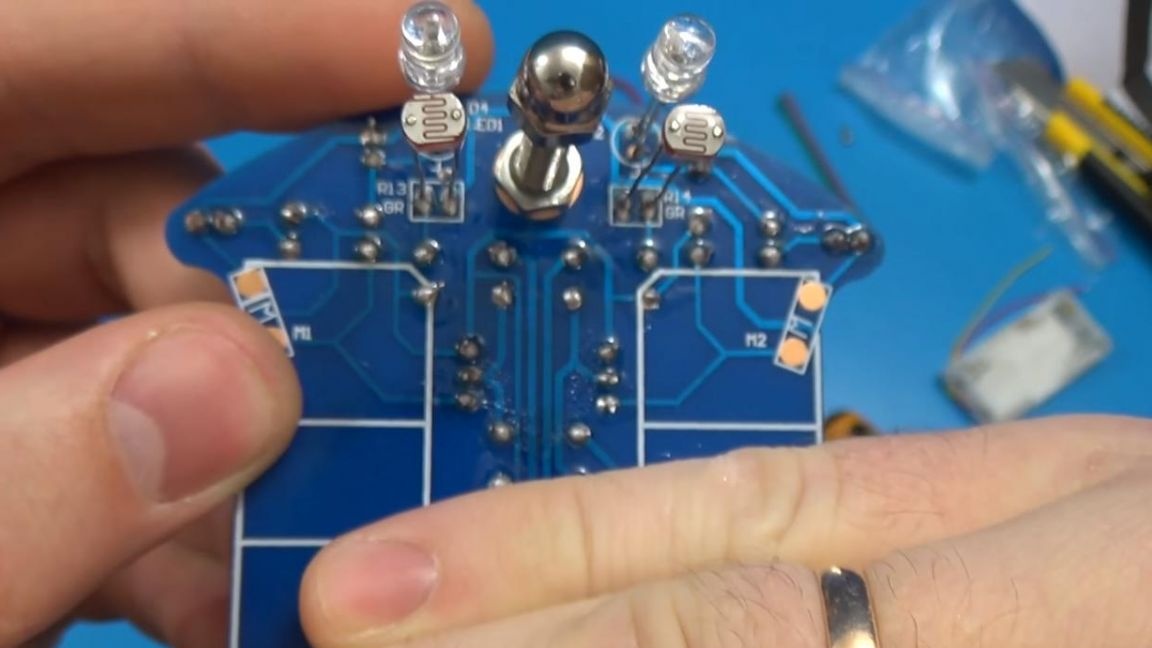
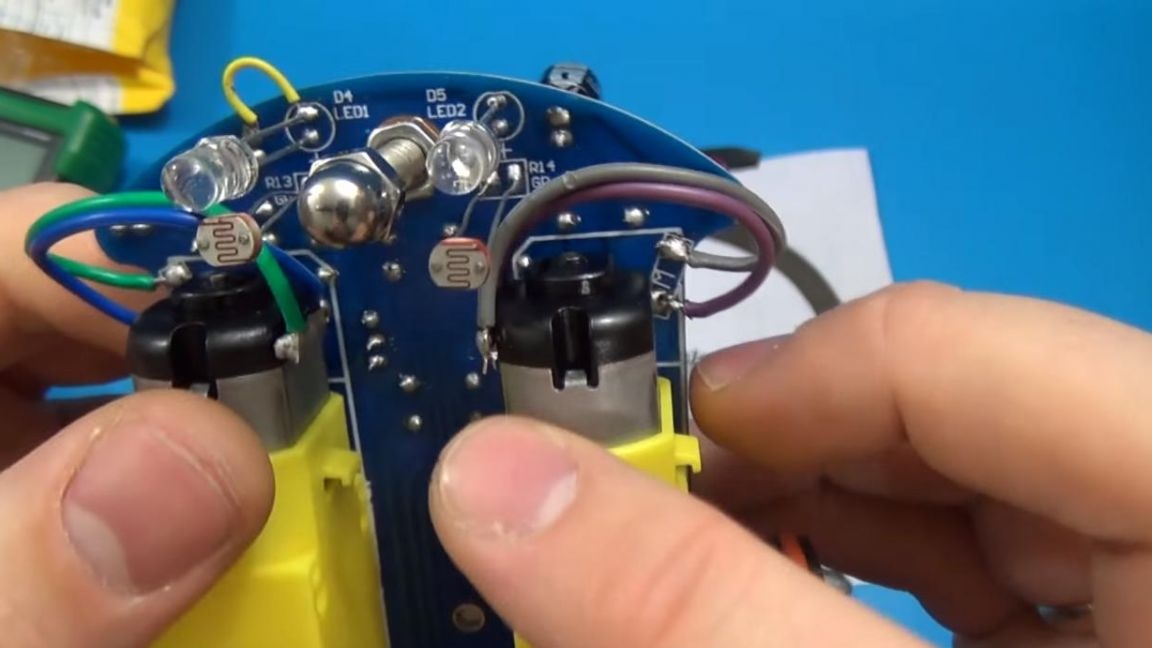
Nu bevestigen we de schroef op het bord en installeren er witte LED's naast, hun afstand moet 1-2 mm kleiner zijn dan de schroefverlenging, dit is duidelijk te zien op de foto, als dit niet wordt waargenomen, zullen de fotoresistors slechter werken of helemaal niet werken .

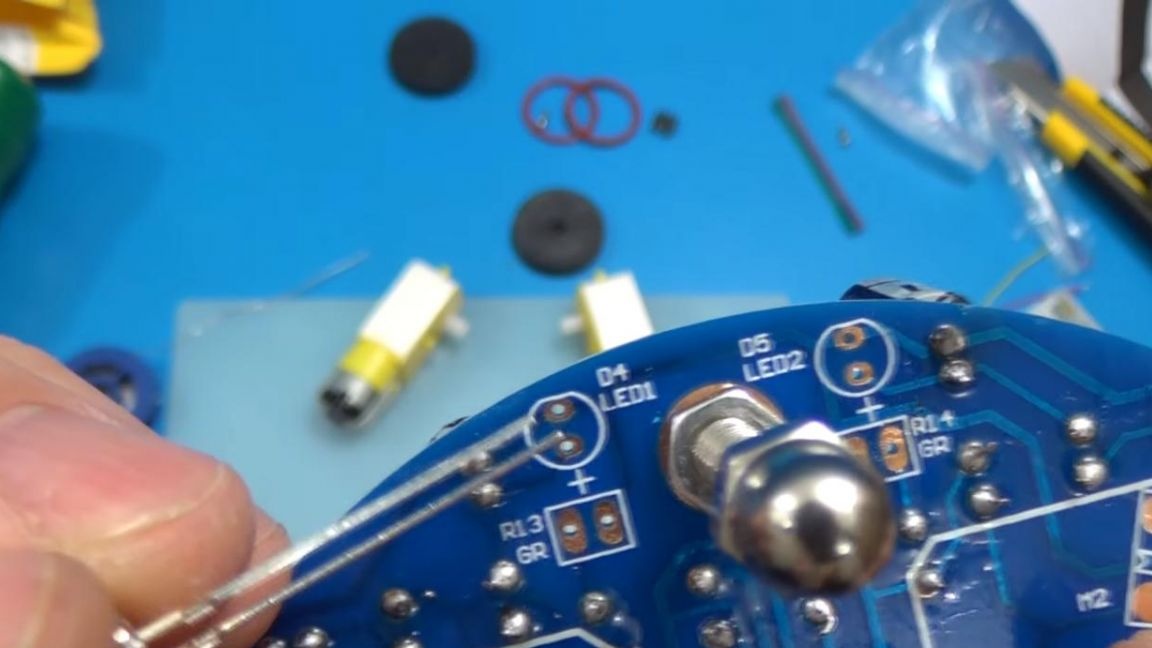
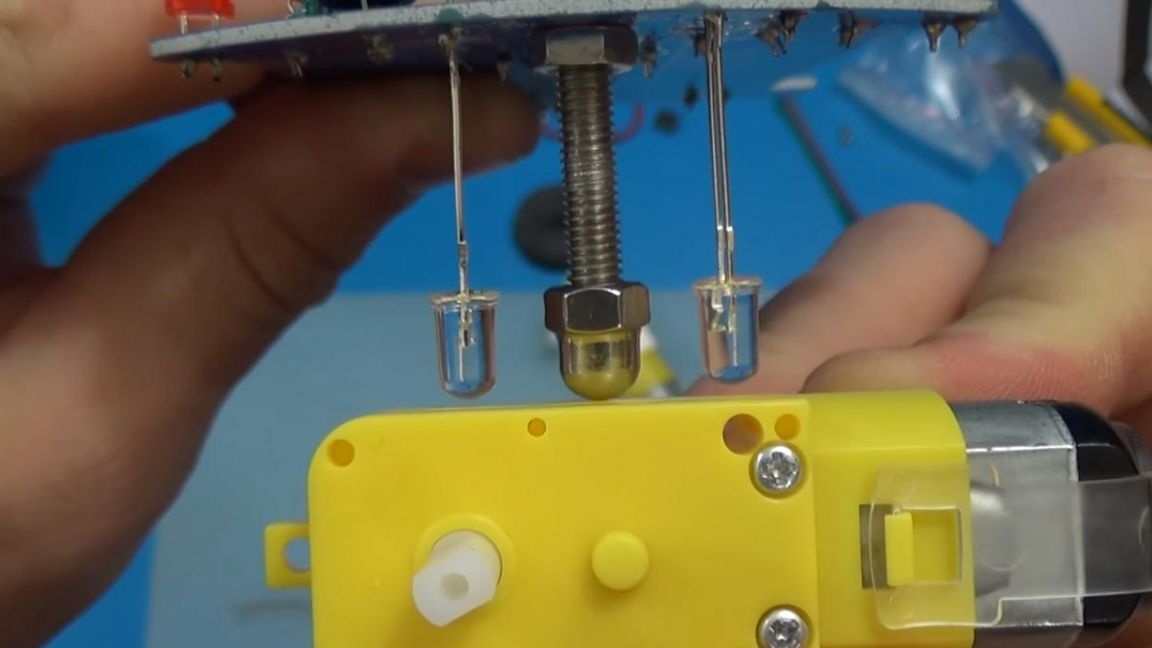
Naast het bord solderen we de fotoresistoren op dezelfde afstand als de leds.

Stap zes
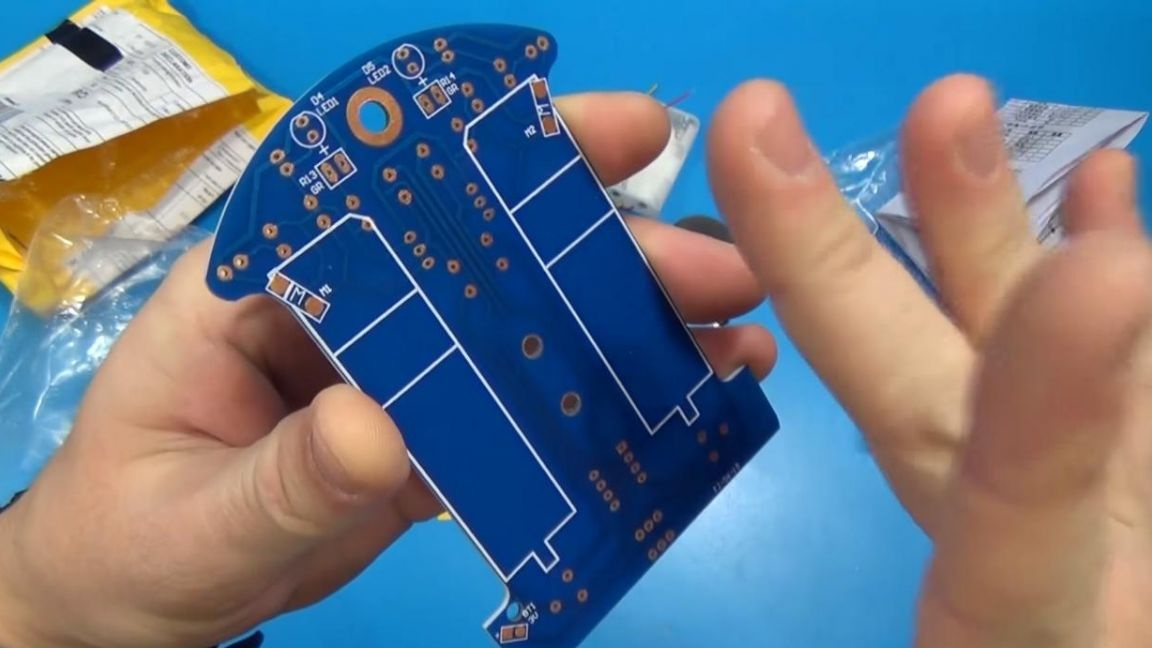
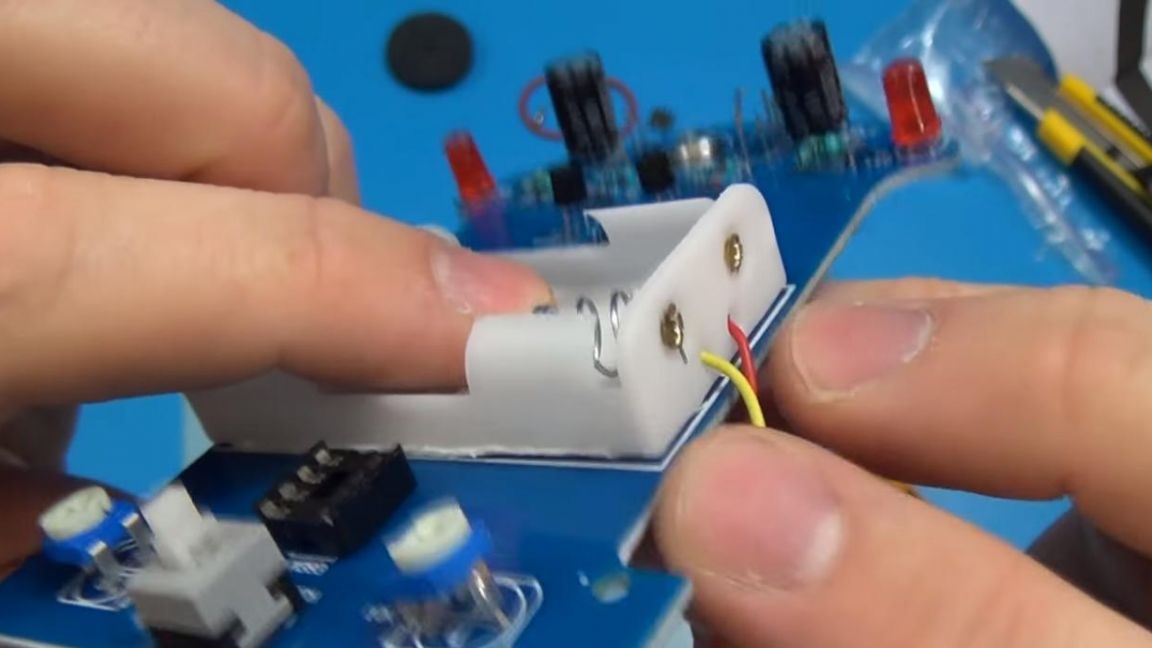
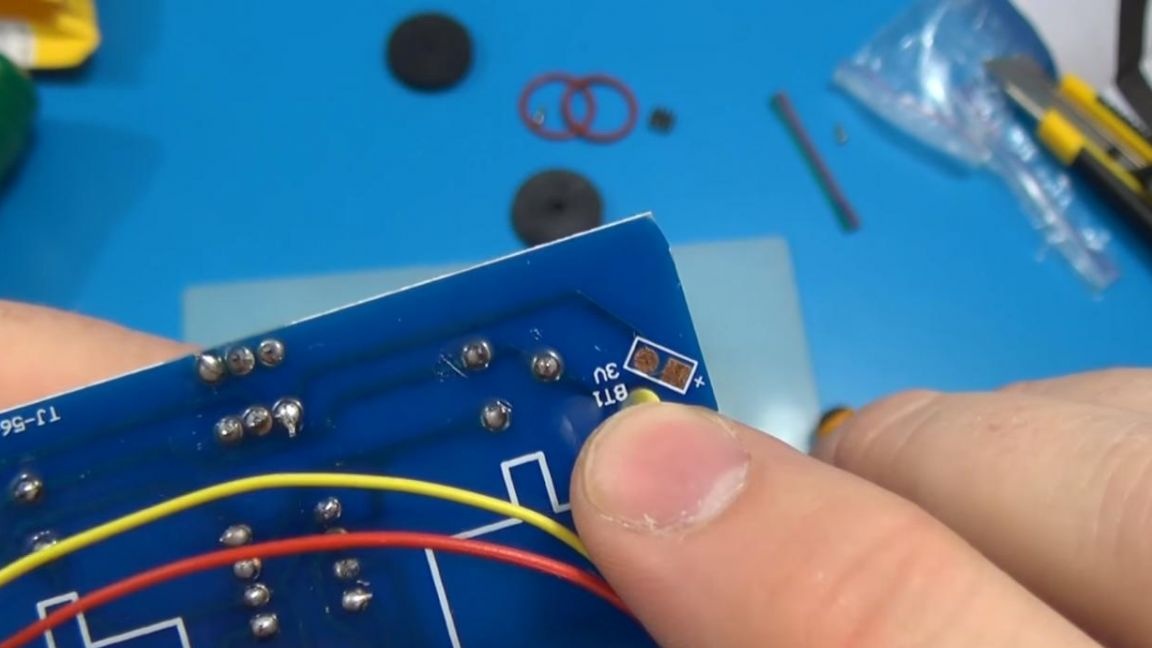
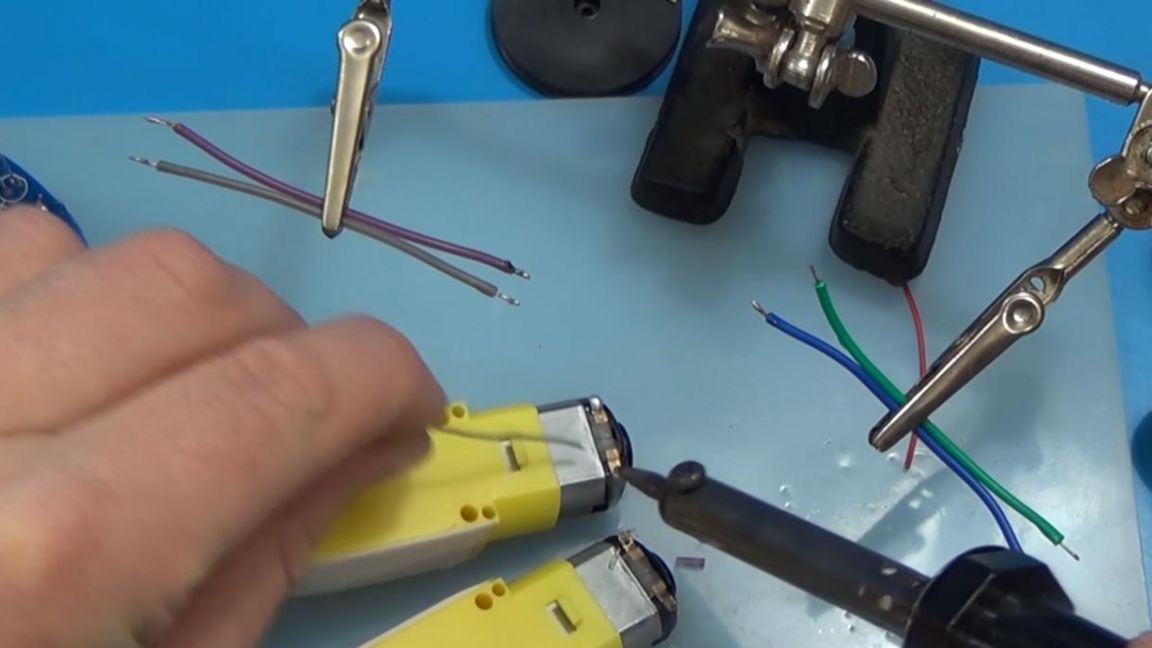
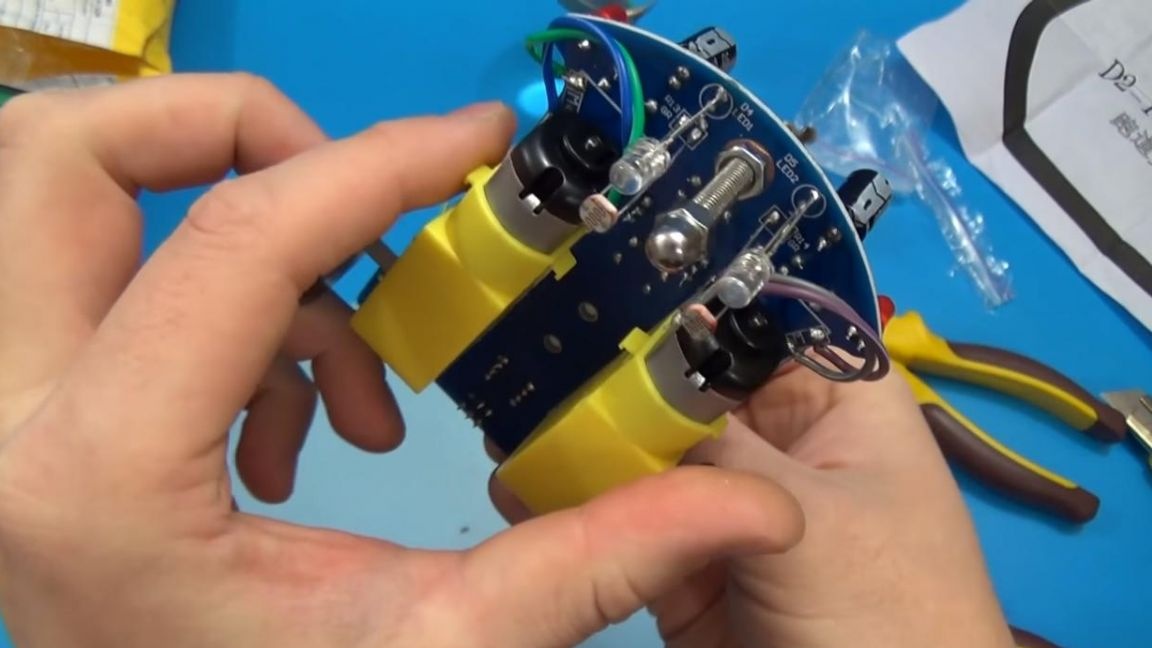
Vervolgens nemen we motoren met versnellingen, hun contacten moeten worden vertind en er moeten twee draden aan worden gesoldeerd, we lijmen ook de behuizing voor het plaatsen van AAA-batterijen en solderen de gele draad aan de min en de rode draad aan de plus, omdat deze op het bord is ondertekend.
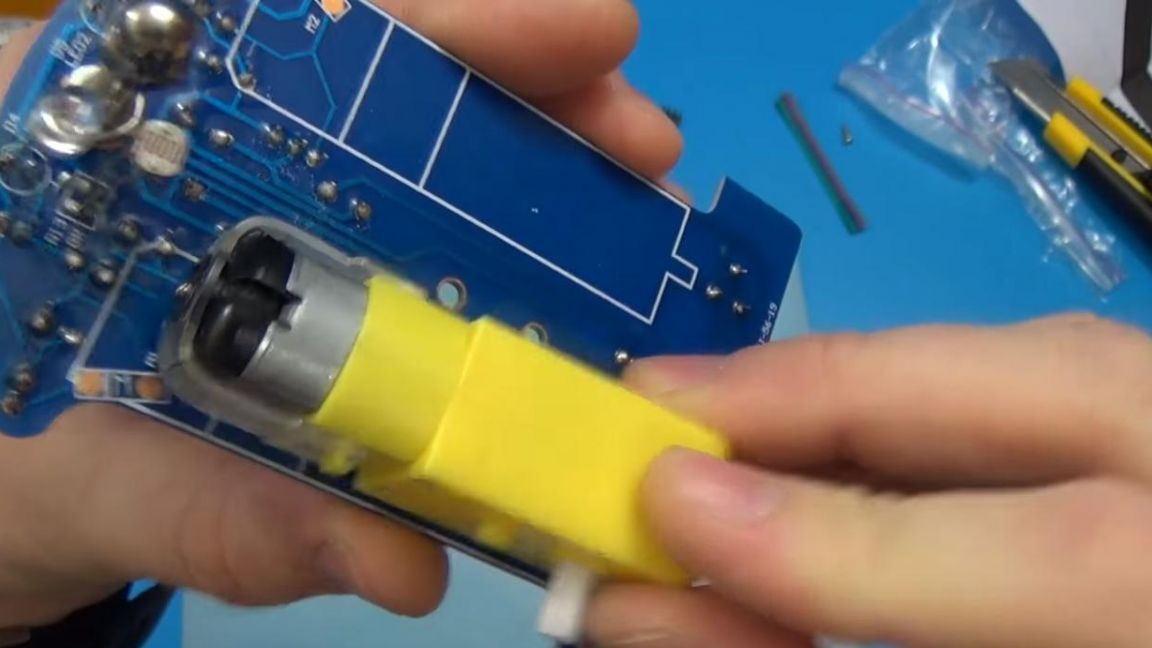

Voordat u de motoren bevestigt, moet u de wielen erop bevestigen, die met één bout zijn bevestigd, en een rubberen pad op het wiel zelf voor een betere grip.

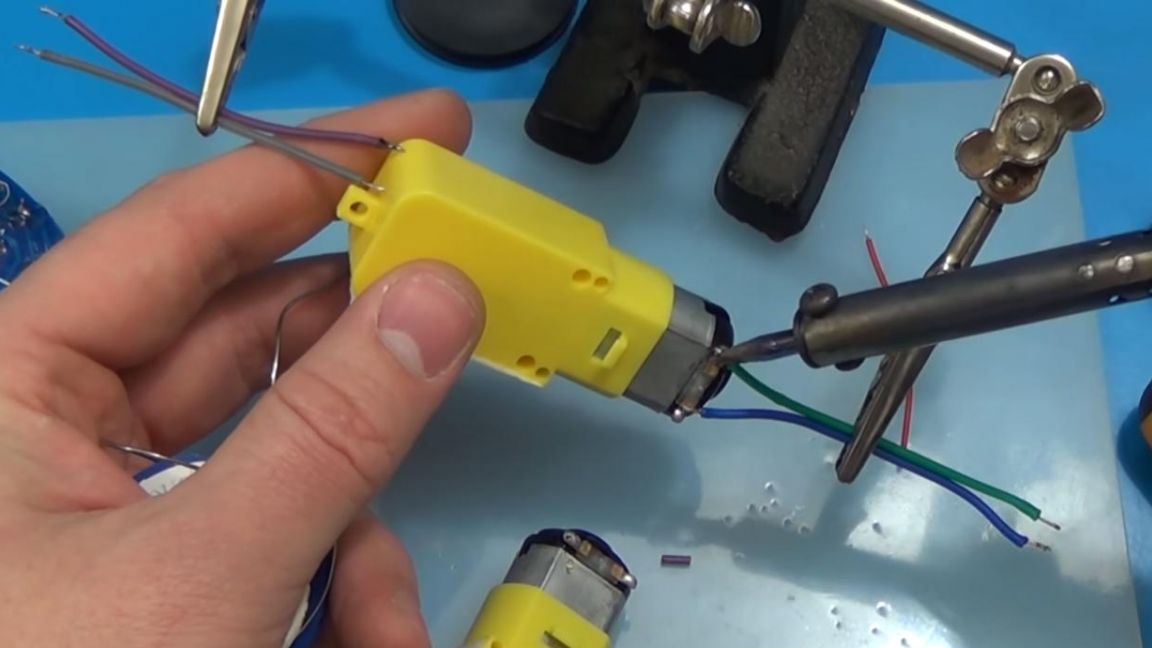
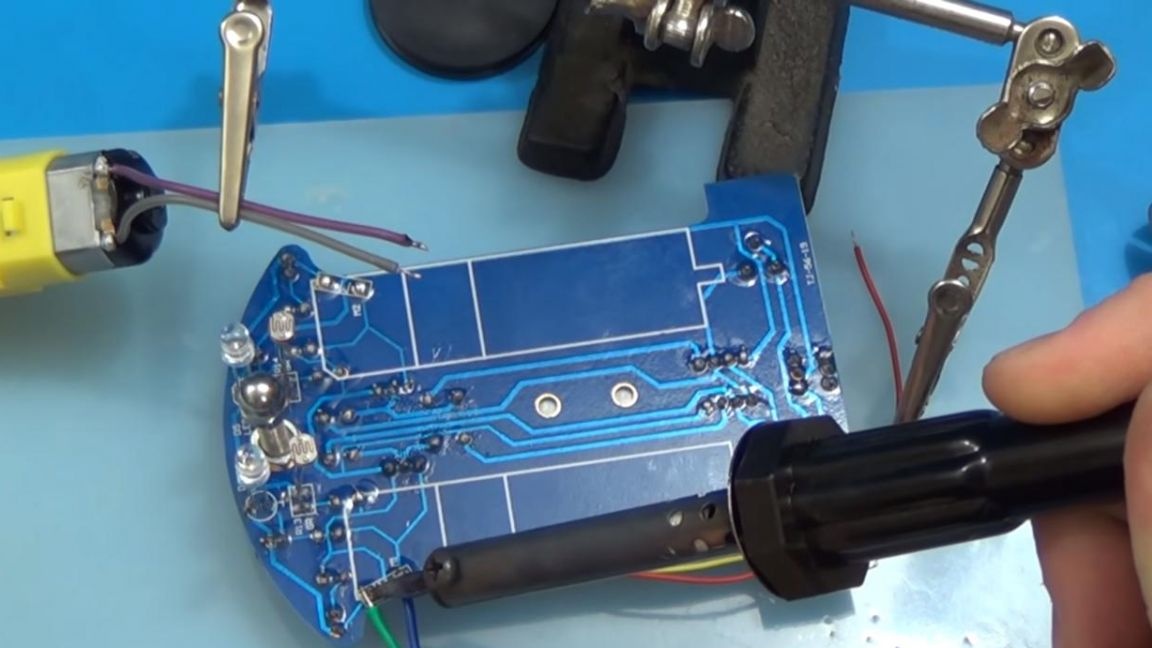
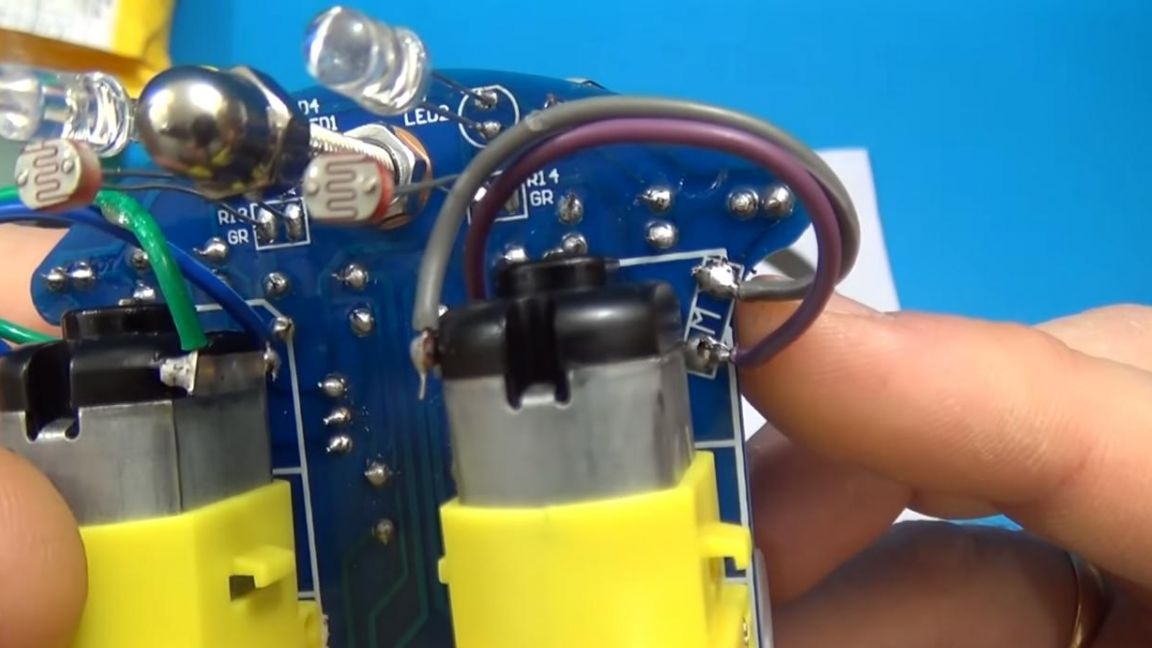
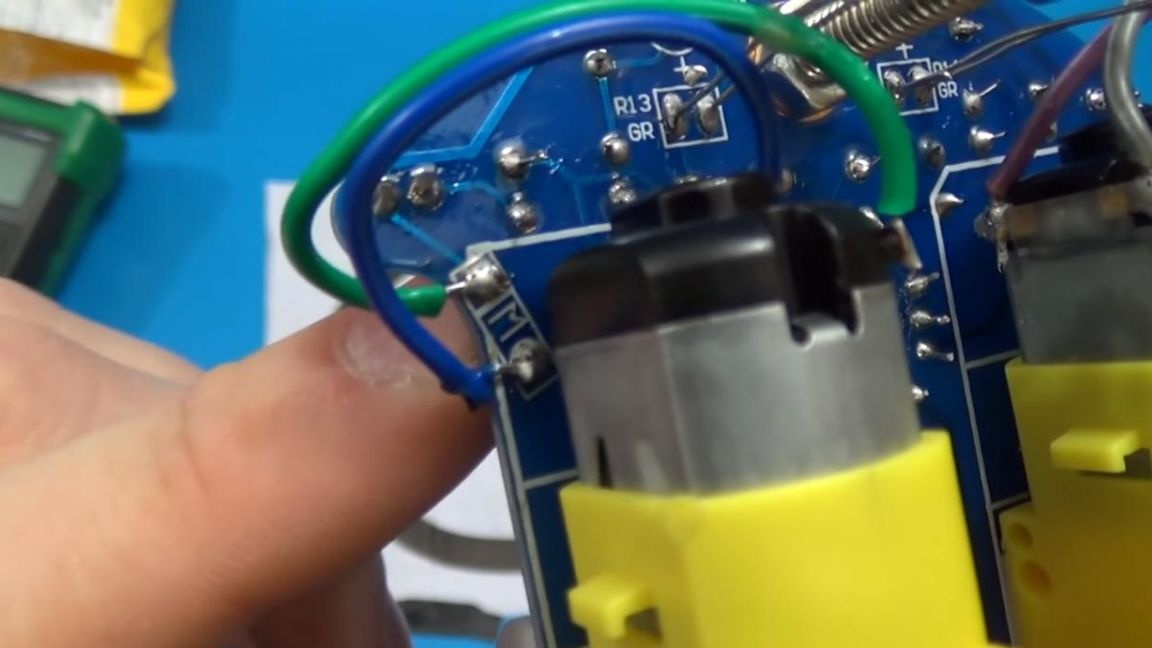
We solderen de draden van de motoren naar het bord, helaas waar is de plus, en waar de min hier niet wordt aangegeven, maar met vallen en opstaan bleek dat het bovenste contact van de motor met een draad en een soldeerbout aan de bovenkant op het bord moet worden aangesloten, met de onderkant doen we hetzelfde .
Welnu, aan het einde van de montage blijft het over om de microschakeling op het bord op de juiste plaats te installeren, de sleutel met het bord te combineren en de batterijen te plaatsen, rekening houdend met de polariteit.

Zevende stap.
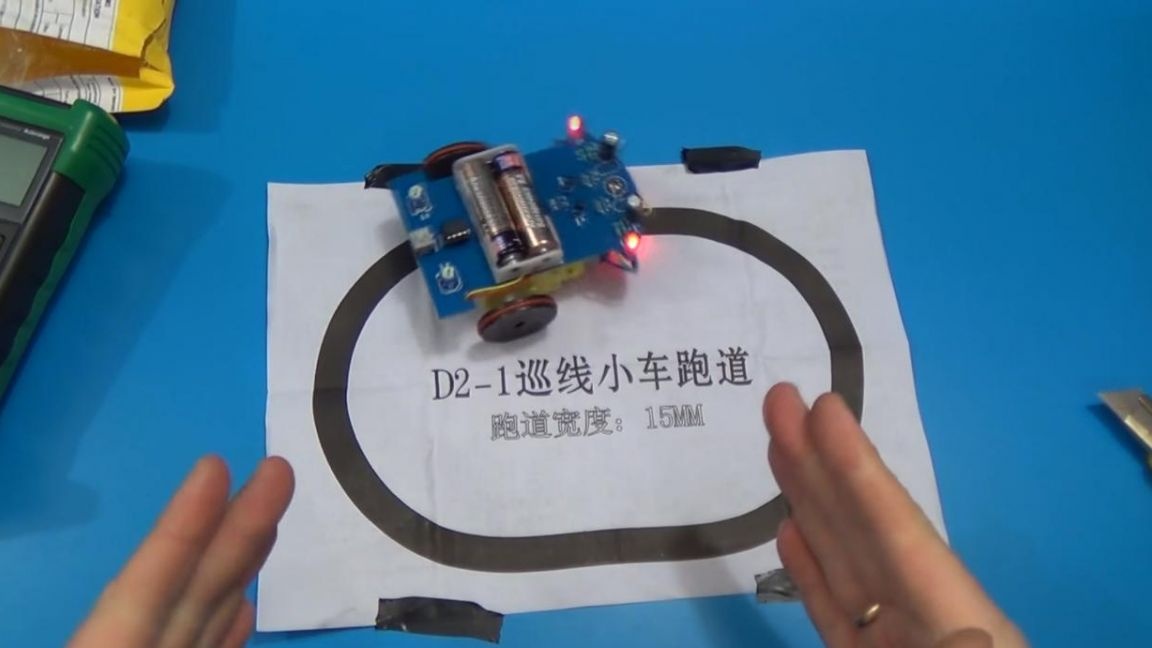
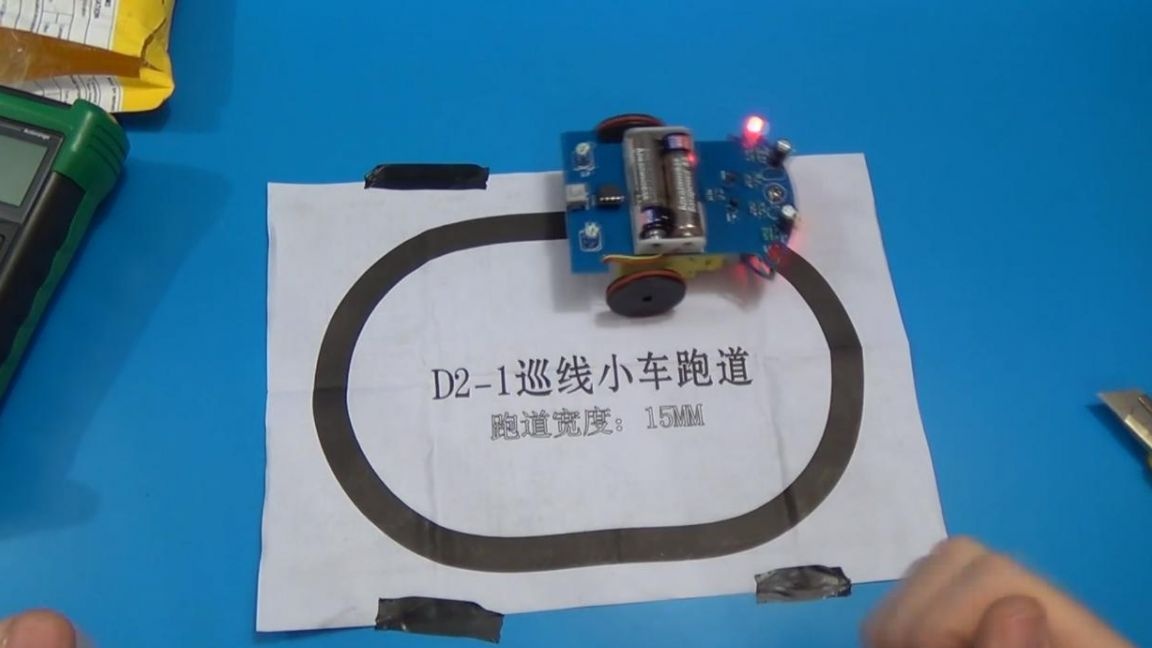
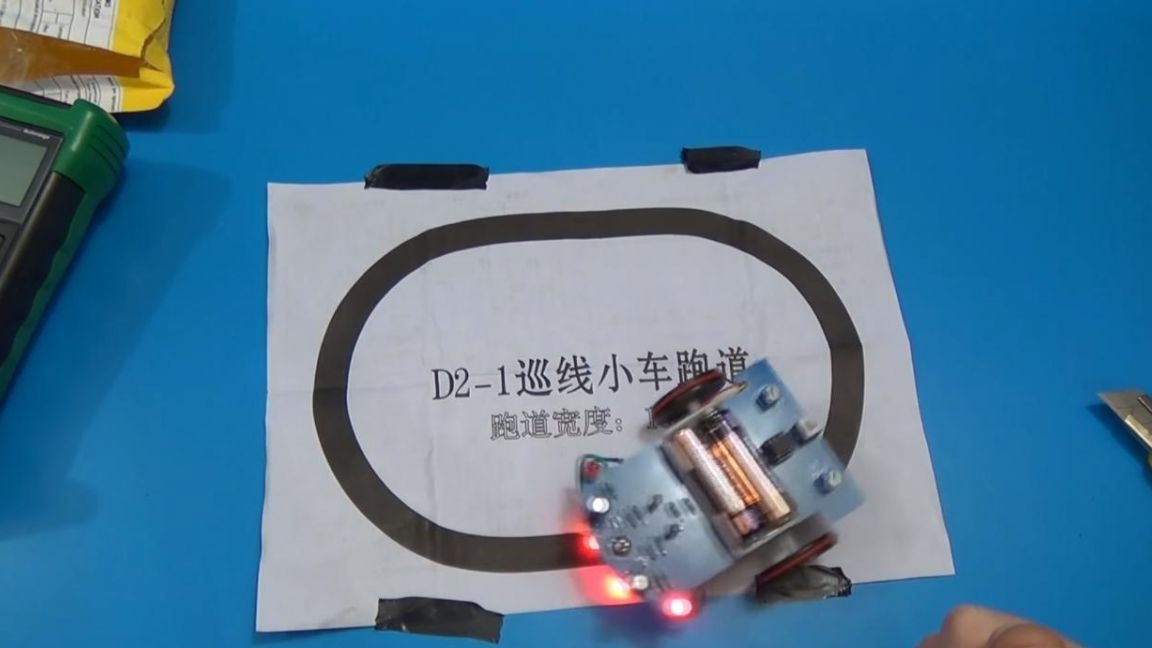
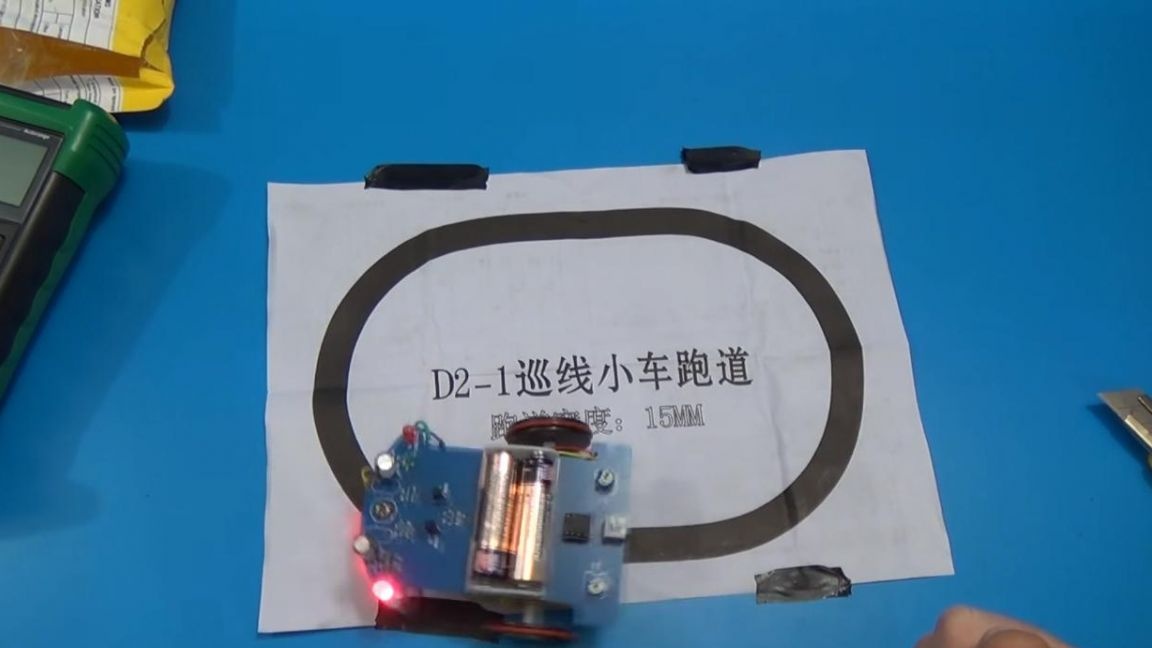
Dus het is tijd om deze robot te testen, de kit bevatte instructies op de achterkant waarvan een ovaal werd getekend met een lijn met een breedte van 15 mm, wat de optimale waarde is.
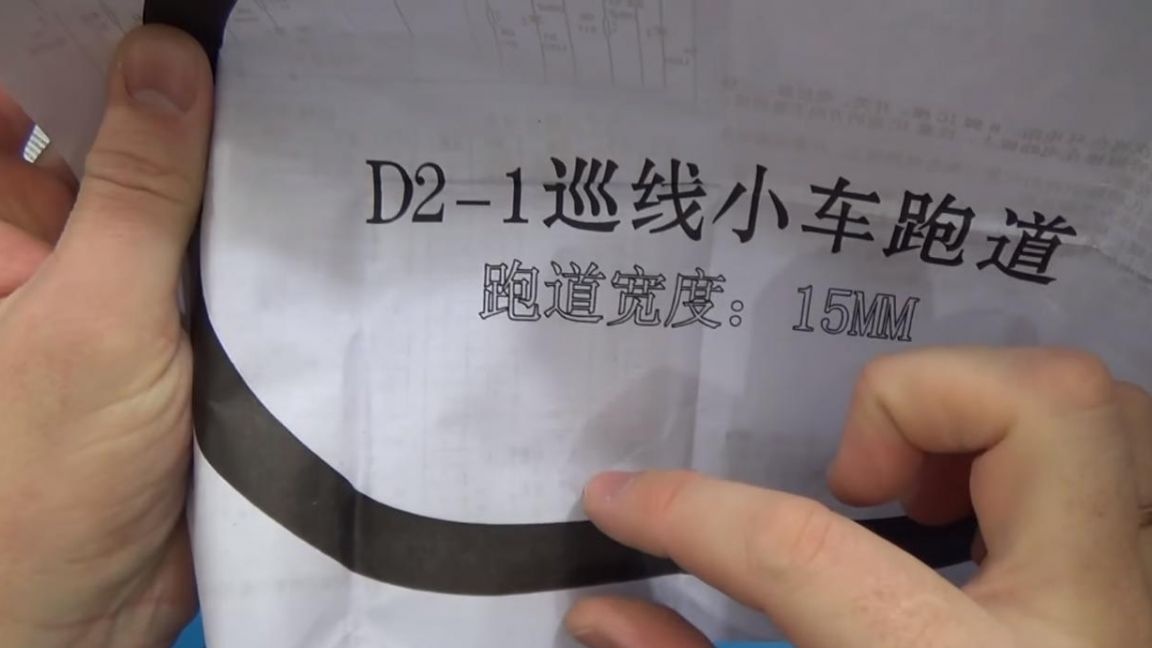
Druk op de aan / uit-knop en de robot Ik ging, voor zijn goede werking zouden de lijnen niet scherp moeten zijn, dat wil zeggen, hij zal geen scherpe bochten kunnen maken. Zo kunt u met een soepele bocht een baan maken door een tape met een breedte van 15 mm op een gelijkmatige coating aan te brengen.
Dat is alles voor mij, bedankt allemaal voor je aandacht en creatief succes.