
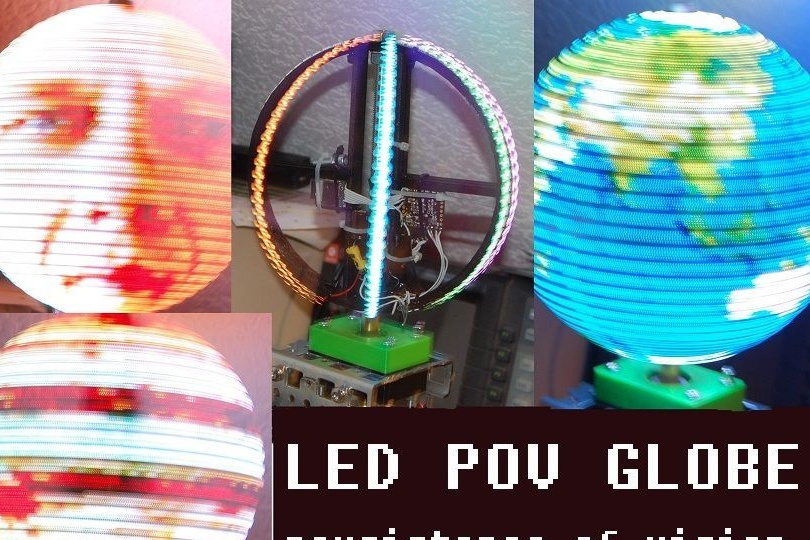
Deze tutorial gaat over het bouwen van een POV-wereld met minder. elektronisch componenten dan andere vergelijkbare apparaten. Door het gebruik van RGB LED's met een geïntegreerde APA102 controller. Dit bespaart u het solderen van talloze draden. Je kunt er meer over lezen. Deze LED's hebben geen extra driver nodig. Ze zijn op twee manieren rechtstreeks op de microcontroller aangesloten. Hierdoor schakel je heel snel leds uit. Om een stabiel beeld te krijgen, komt SPI-synchronisatie met een frequentie van 10 MHz. Een ander pluspunt van dit ontwerp is het gebruik van een flash-kaart, die de afbeelding opslaat in BMP-formaat.
1 Benodigde materialen

Voor de as van de wereld heb je nodig:

1. Stud met M8-schroefdraad en een lengte van 250 mm
2. Moer M8
3. Messing huls 10 mm en 100 mm lang
4. Plastic ringen 8 mm 2 stuks (STL-bestanden inbegrepen)
5. koppeling voor wie de stappenmotor NEMA 17 gaat gebruiken
Om de LED-ring op de as aan te drijven, heb je nodig
1. kogellager 6300 (10x35x11)
2. twee beugels voor lagers. Gedrukt op een 3D-printer of gemaakt van hout.
3. Vier M4x40 bouten met moeren
4. Tips over draden 2 stuks 8mm
5. met een asdiameter van 5 mm
6. 4 bouten M4 voor motorbevestiging
7. misschien een fan.
Als alternatief kunt u elke motor gebruiken met de juiste koppel- en snelheidsregeling. De motor die in dit ontwerp wordt gebruikt, heeft een maximumkoppel bij een stroom van 50A, maar het maximale stroomverbruik tijdens bedrijf is slechts 18A.
Gebruik om de servomotorische driver te bedienen
1.
2. twee knoppen
Voeding 12V voor motor en 5V voor LED's. Als voeding kunt u de oude eenheid vanaf de pc gebruiken. U kunt een 12v / 5A-voeding kopen en hierop aansluiten
Voor de LED-ring heb je nodig:
1.664 LED's 2 strips van 32 stuks
2. Condensator 1000 µF 10V
3. Hall-sensor en magneet
4. De optrekweerstand 1k, 10k
5. De ring moet worden afgedrukt op een 3D-printer of een stuk PVC-buis gebruiken
6. Plastic banden (100 mm)
7. Een goede lijm die aan elkaar plakt en niet uit elkaar vliegt bij 2500 toeren
Je hebt ook een Parallax Propeller Microcontroller nodig. Of u kunt een andere gebruiken het model controller, maar neem daarnaast een vergoeding voor. Deze controller is zo eenvoudig geprogrammeerd en geflitst Arduino. U heeft een USB-TTL-adapter nodig om beide controllers te programmeren.
Lichaam.
Huisvesting voor zelfgemaakt Je kunt alles hard genoeg nemen. Het belangrijkste is dat u de motor en lagers veilig kunt bevestigen.
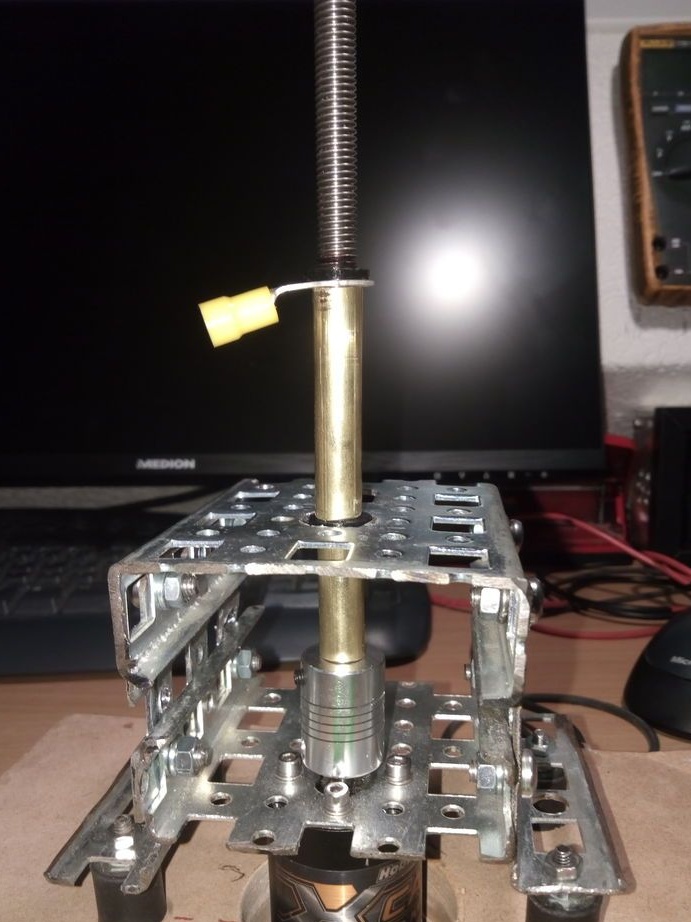
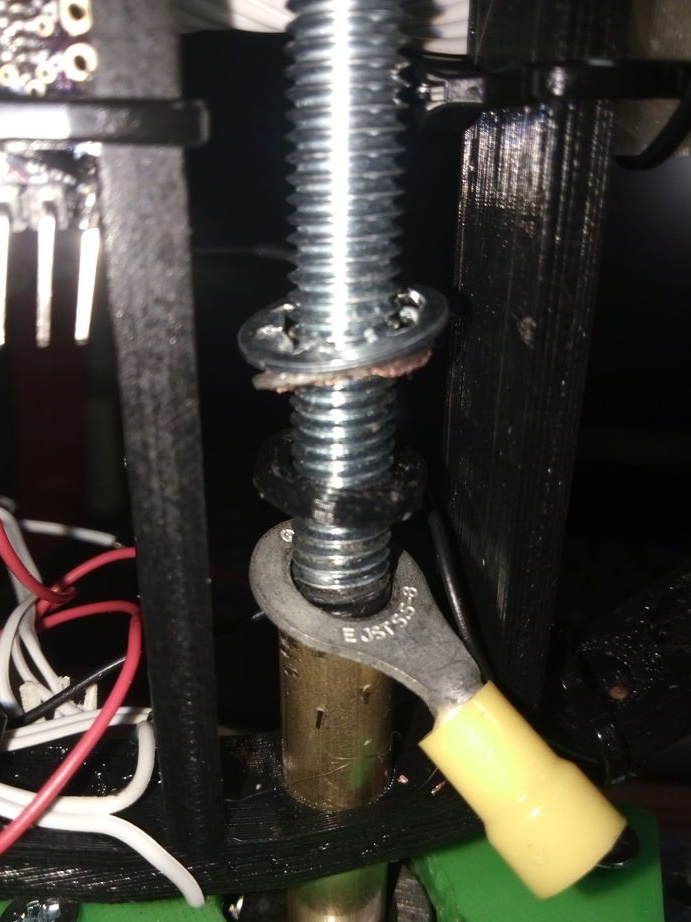
Voor de aandrijfas wordt een 250 mm lange tapeind gebruikt.De lengte van de messing bussen is 50 en 30 mm. Hangt af van ringmaat en schachtlengte. De bovenste en langere mouw moeten worden geïsoleerd van de nop, omdat deze wordt gebruikt om de LED's van stroom te voorzien. Om dit te doen, wikkelt u elektrische tape op een haarspeld of gebruikt u krimpkous, er zijn ook twee plastic ringen nodig. De huls moet worden geboord tot 8,5-9 mm, anders past deze niet. De andere huls vormt samen met de stang een negatief contact.
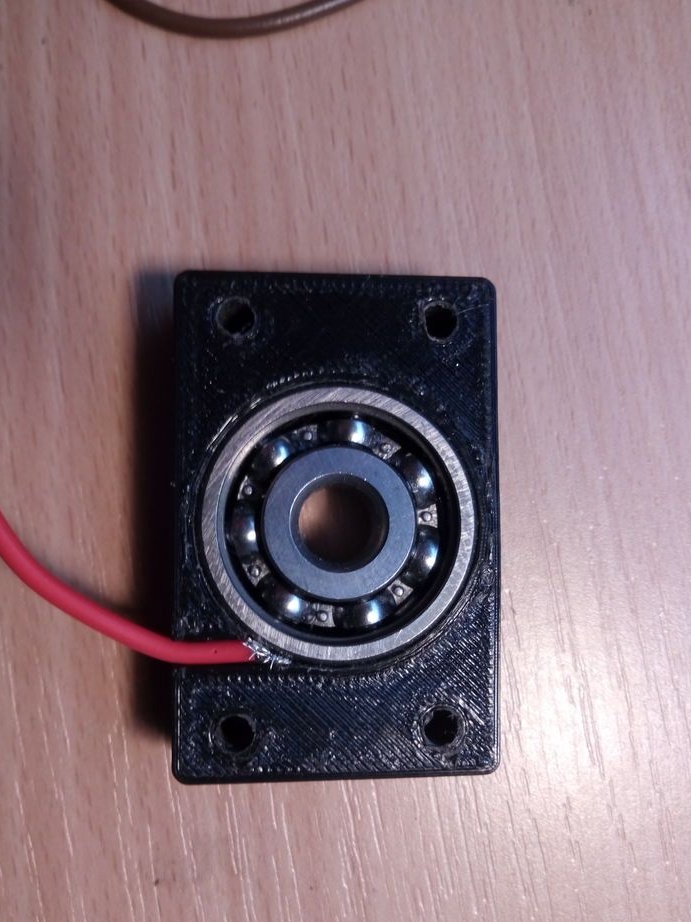
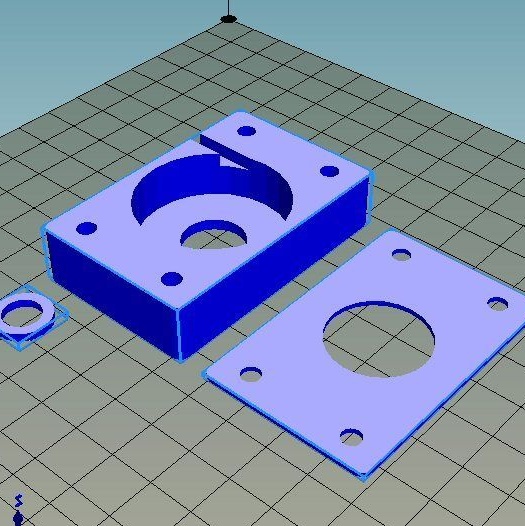
Het minusvermogen wordt in een speciale groef geplaatst en tegen het lager in de beugel gedrukt, die op een printer kan worden afgedrukt. Beugel STL-bestand in archief.


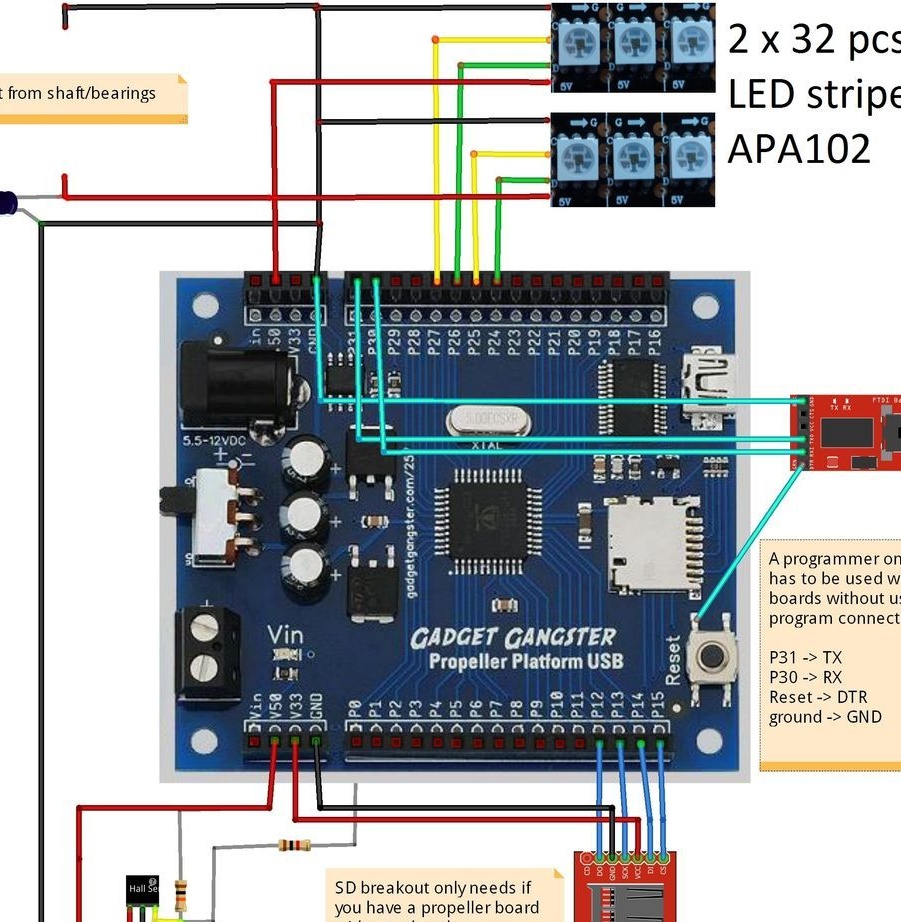
Nu moet u de elektromotor aansluiten, zoals weergegeven in het diagram.
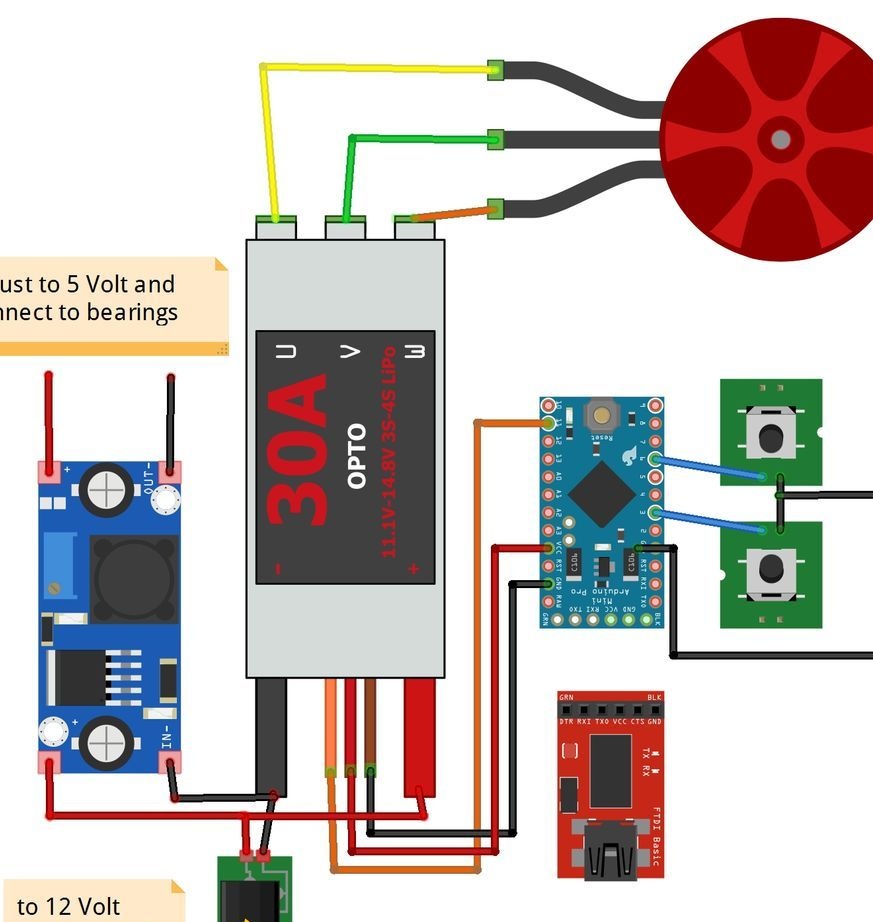
Twee knoppen op het diagram worden gebruikt om de snelheid aan te passen. Wanneer u de stroom inschakelt, ontvangt de ESC een waarde van 500 μs. Druk op een van de knoppen om de motor aan te zetten. De schets krijgt de waarde "StartPos = 625". Later, wanneer u de snelheid aanpast, kan deze waarde worden gewijzigd. Druk twee seconden op de knop en de motor moet stoppen.
Montage van de kernstructuur.
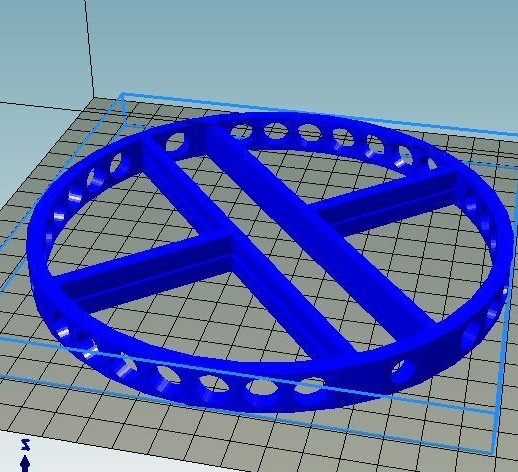

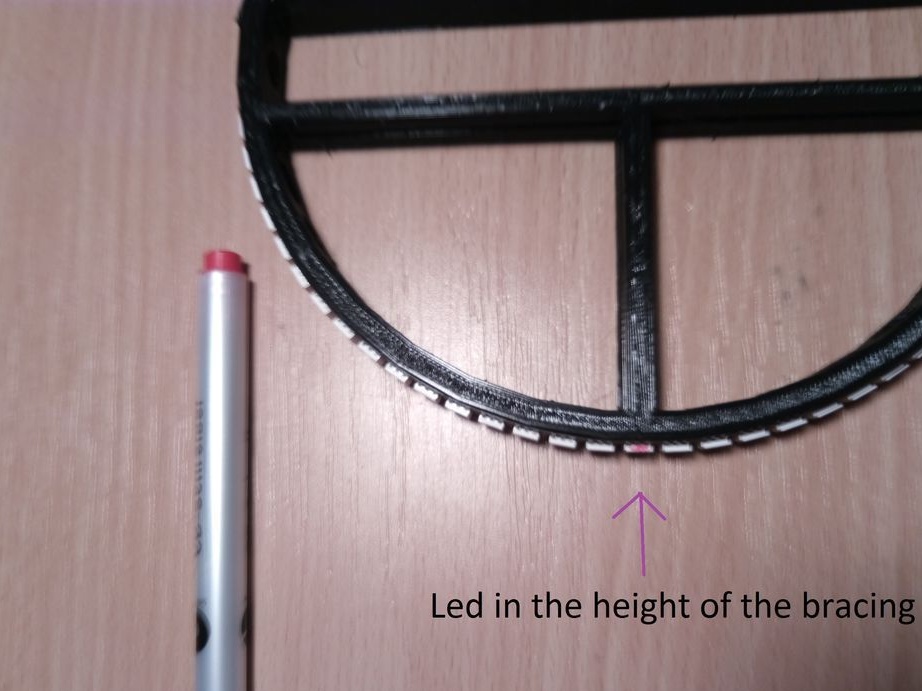
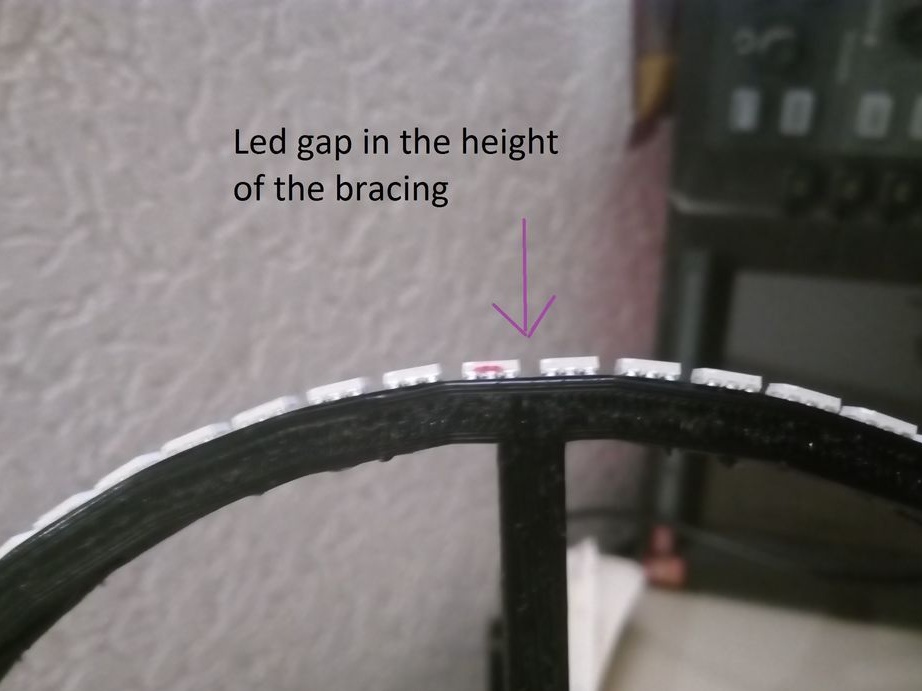


Druk hiervoor de ring zelf af vanuit het bijgevoegde bestand. De auteur heeft er veel gaten in gemaakt om het gewicht te verminderen. U kunt een stuk PVC-buis gebruiken. Twee strips van 32 leds worden doorgesneden. Twee ledstrips vormen even en oneven lijnen. Leg de tapes zo neer dat de leds van de ene strip zich tussen de leds van de andere bevinden, maar vanaf de achterkant. Nadat u de tape heeft vastgemaakt, kunt u de LED's van de controllerkaart aansluiten. En dan moet je de hele montage balanceren.
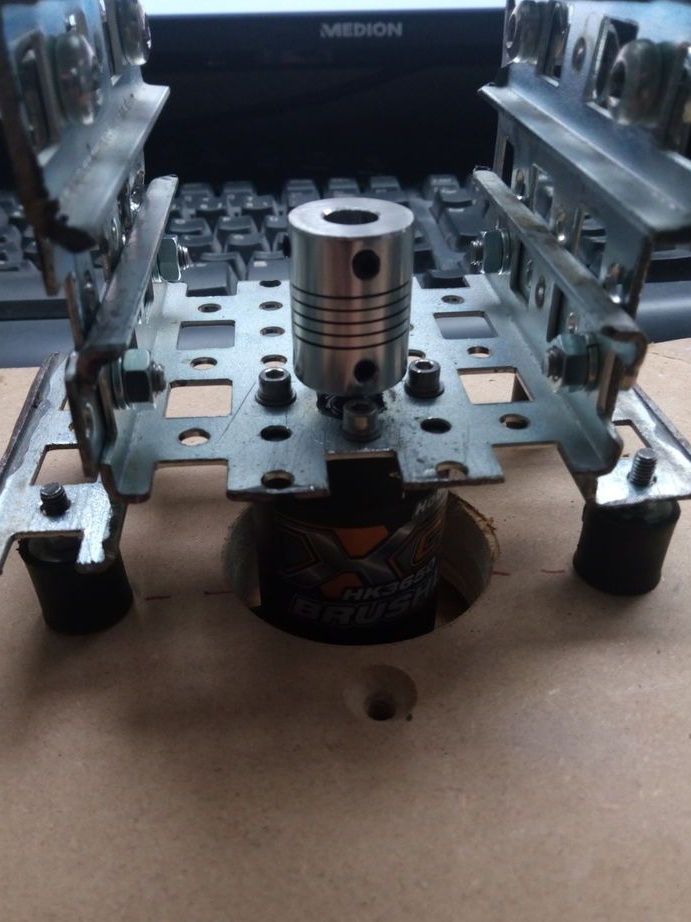
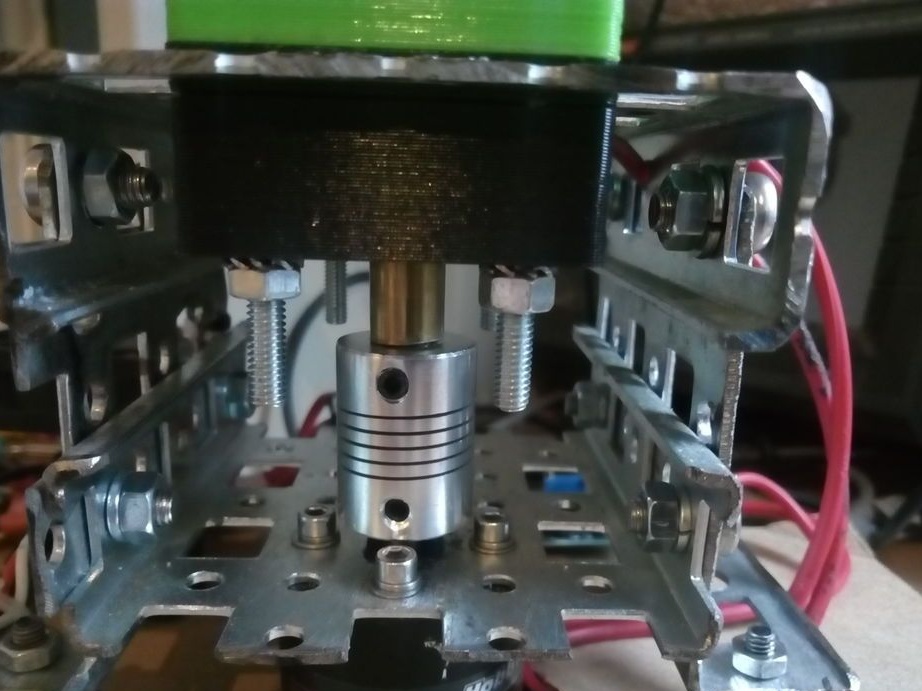
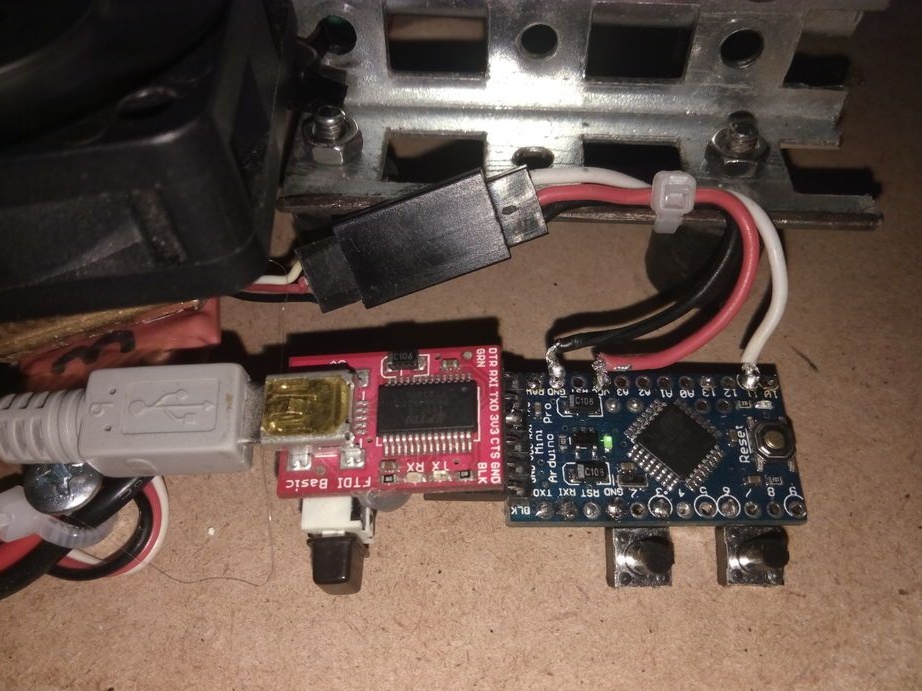
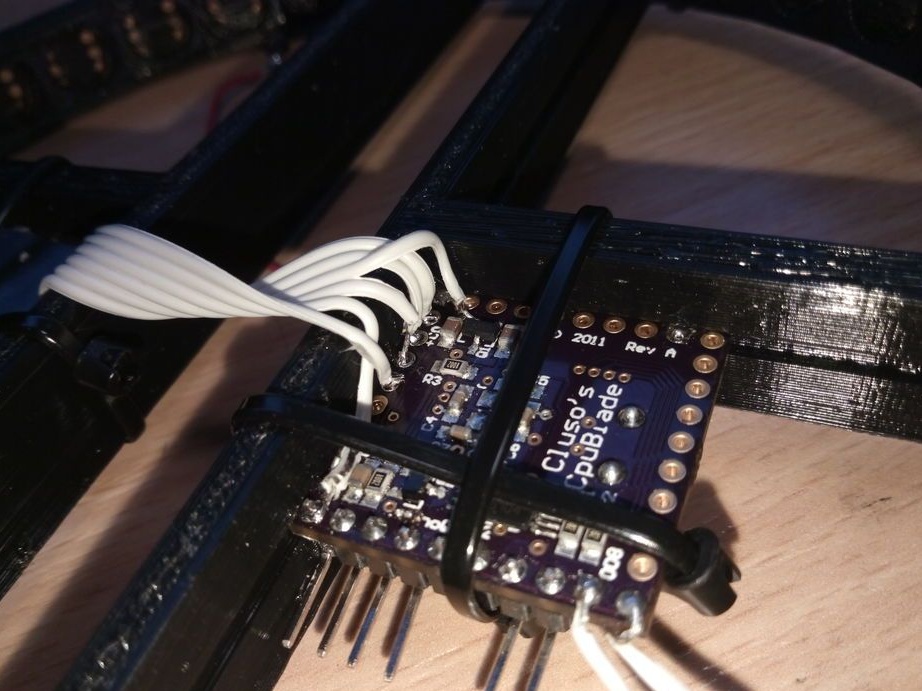
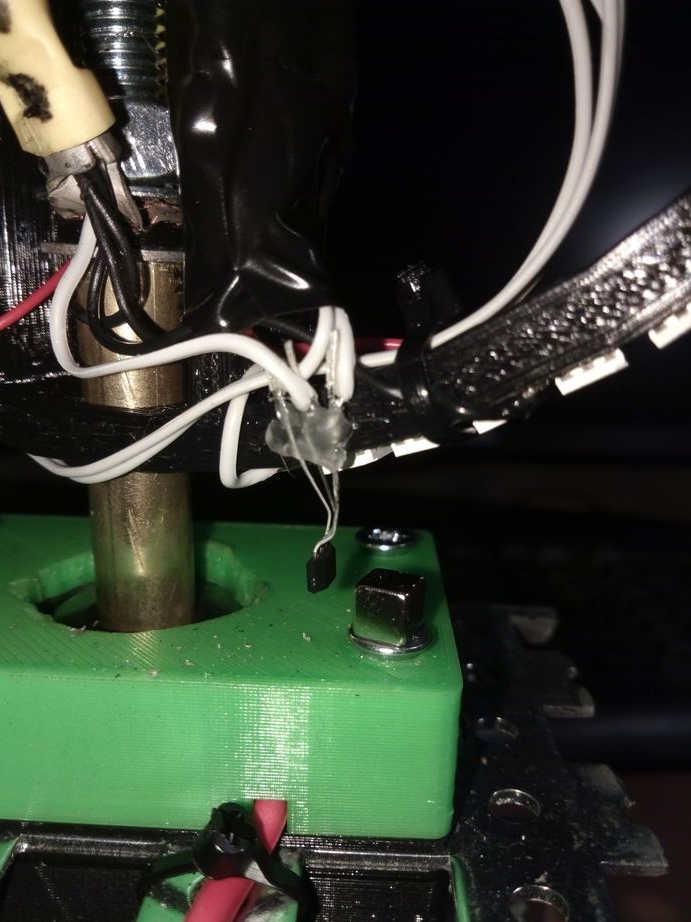
De volgende foto's laten zien hoe u alle componenten van het apparaat met elkaar verbindt. De foto toont ook de geïnstalleerde hall-sensor met een magneet.
Om Parallax Propeller Microcontroller te programmeren heb je nodig
Sluit uw apparatuur NIET aan op een USB- of seriële poort totdat u de software hebt geïnstalleerd. Meer informatie over het uploaden van firmware naar Parallax is te vinden
De auteur gebruikt een ouder en daardoor minder zuinig MCU-bord, omdat het geen nieuwe bibliotheken kan vinden op nieuwe controllerkaarten.
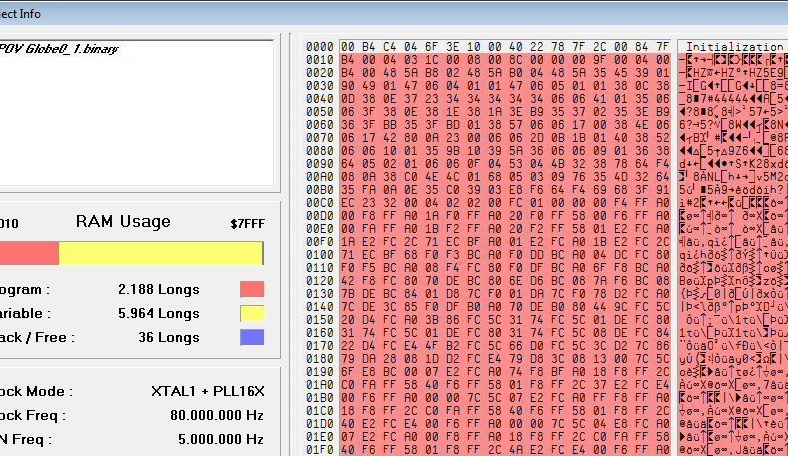
Nadat u alles hebt verzameld en aangesloten, moet u de controller programmeren. De auteur doet dit met hulp. Bestanden met firmware in het archief.
Nu kunt u proberen het apparaat te starten. Kopieer vanaf het begin de testfoto naar de SD-kaart en plak deze in de sleuf.
• Als u de ring met de hand draait, moeten de leds knipperen telkens wanneer de hall-sensor de magneet passeert
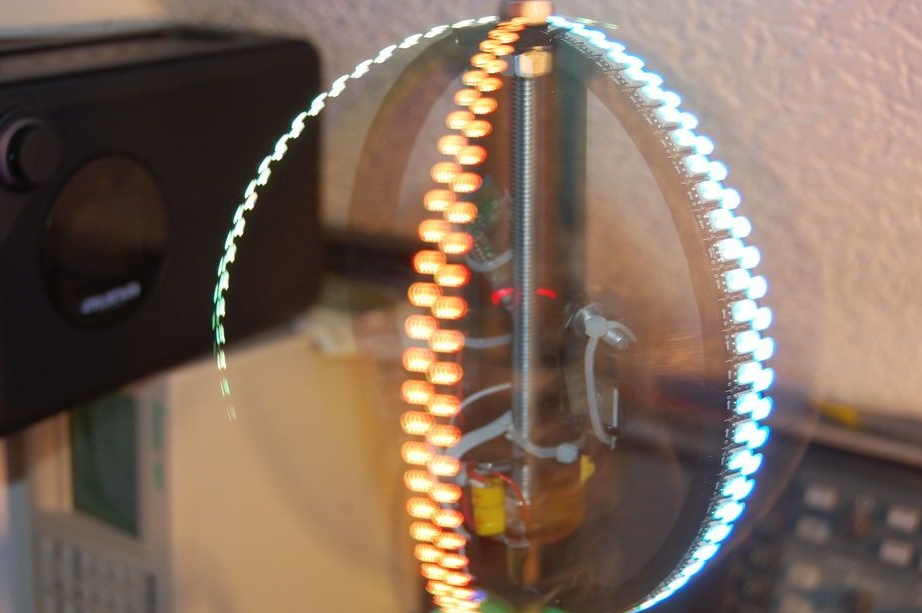
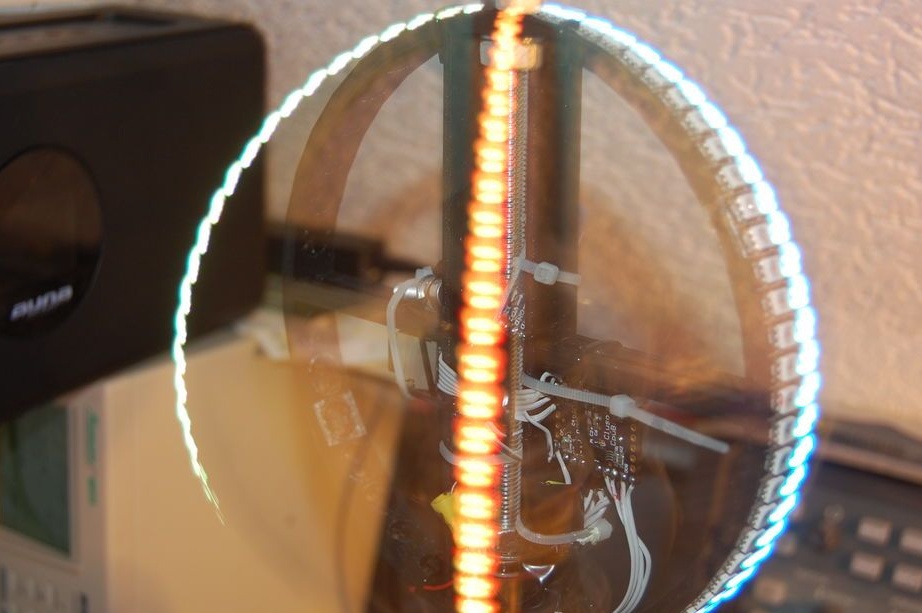
• Zet de motor aan. Door de snelheid te verhogen met de knoppen, moet ervoor worden gezorgd dat de LED's oplichten zoals weergegeven in 2 foto's
• Sluit de Arduino-terminal aan op de motorcontroller.
• Onthoud de weergegeven waarde.
• Stop de motor
• Schrijf de eerder opgeslagen waarde naar de variabele "startPos"schets POV_MotorControl
• Programmeer de Arduino opnieuw.
De volgende keer start je motor direct op de juiste snelheid. Nu kunt u elke afbeelding op de kaart "vullen". Om dit te doen, moet u het formaat van de afbeelding wijzigen met 120x64 pixels, de afbeelding 90 graden linksom draaien en verticaal spiegelen. Verlaag de helderheid van het beeld, omdat de LED's erg helder zijn. Om dit te doen, is het beter om gammacorrectie te gebruiken met een coëfficiënt van 0,45.
Sla afbeelding op als BPM 24 bit zonder compressie. Na alle manipulaties is het uitvoerbestand de grootte 23094 byte.



